第2讲 回转误差的测试原理
回转轴误差

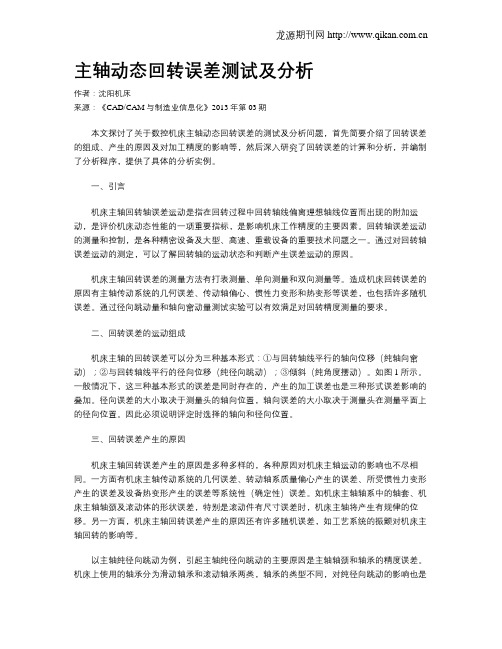
对圆图像的数值评定,通常采用包容法,即用两个 正好包容误差运动图像的同心圆的半径差作为该误 差运动大小的评定值,此数值,与所采用的同心圆 的圆心位置有关 因此,在给出误差运动数值时,应该同是说明所用 的圆心特征。可供选择圆心有最小区域圆圆心 (MRC)、图面圆圆心(PC)( 误差运动圆图像的极 坐标中心)、最小二乘圆圆心(LSC)、最小外接圆 圆心(MCC)和最大内切圆圆心(MIC)。
误差运动使回转轴上任何一点发生与轴 线平行的移动的和垂直于轴线的平面内 的移动。 前者称为该点的轴向运动误差,后者称 为该点的径向运动误差,均随测量点所 在半径位置不同而异。 所以在讨论误差运动时,应指明测量点 位置。
(2)径向回转误差运动的测量
ຫໍສະໝຸດ 1)双向测量法 这种方法的测量系统如图所示。在主轴前端 的摆盘上固定一个精密钢球,作为基准球, 用它的表面来“体现”回转轴线。 直接采用回转轴上的某一回转表面作为基准 面时,由于形状误差的影响,测量精确度较 差。 传感器1和2位于互成90°,并通过基准球中 心的径向平面内。
(3)圆图像的处理和分析
圆图像一般是在一段时间内连续记录若干转的 回转误差运动而获得的。 由于随机因素的影响,各转的误差运动并不重 合,因而它是由一组误差运动曲线组成的,称 为总误差运动圆图像,如图4.31所示。 各转误差运动曲线的平均曲线,称为平均误差 运动图像,如图4.31中的粗线所示。 总误差运动圆像反映了误差运动的总体情况, 而平均误差运动圆图像则反映了某种倾向性的 误差运动规律。
调节摆盘上的螺钉可使固定基准球的法兰 盘绕圆球作相对摆动,从而改变基准球相 对于回转轴心的安装偏心量。 两个传感器所检测到的实际位移信号经过 测量电路处理后,在示波器上以圆图像形 式显示。
主轴动态回转误差测试及分析
主轴动态回转误差测试及分析作者:沈阳机床来源:《CAD/CAM与制造业信息化》2013年第03期本文探讨了关于数控机床主轴动态回转误差的测试及分析问题,首先简要介绍了回转误差的组成、产生的原因及对加工精度的影响等,然后深入研究了回转误差的计算和分析,并编制了分析程序,提供了具体的分析实例。
一、引言机床主轴回转轴误差运动是指在回转过程中回转轴线偏离理想轴线位置而出现的附加运动,是评价机床动态性能的一项重要指标,是影响机床工作精度的主要因素。
回转轴误差运动的测量和控制,是各种精密设备及大型、高速、重载设备的重要技术问题之一。
通过对回转轴误差运动的测定,可以了解回转轴的运动状态和判断产生误差运动的原因。
机床主轴回转误差的测量方法有打表测量、单向测量和双向测量等。
造成机床回转误差的原因有主轴传动系统的几何误差、传动轴偏心、惯性力变形和热变形等误差,也包括许多随机误差。
通过径向跳动量和轴向窜动量测试实验可以有效满足对回转精度测量的要求。
二、回转误差的运动组成机床主轴的回转误差可以分为三种基本形式:①与回转轴线平行的轴向位移(纯轴向窜动);②与回转轴线平行的径向位移(纯径向跳动);③倾斜(纯角度摆动)。
如图1所示。
一般情况下,这三种基本形式的误差是同时存在的,产生的加工误差也是三种形式误差影响的叠加。
径向误差的大小取决于测量头的轴向位置,轴向误差的大小取决于测量头在测量平面上的径向位置。
因此必须说明评定时选择的轴向和径向位置。
三、回转误差产生的原因机床主轴回转误差产生的原因是多种多样的,各种原因对机床主轴运动的影响也不尽相同。
一方面有机床主轴传动系统的几何误差、转动轴系质量偏心产生的误差、所受惯性力变形产生的误差及设备热变形产生的误差等系统性(确定性)误差。
如机床主轴轴系中的轴套、机床主轴轴颈及滚动体的形状误差,特别是滚动件有尺寸误差时,机床主轴将产生有规律的位移。
另一方面,机床主轴回转误差产生的原因还有许多随机误差,如工艺系统的振颤对机床主轴回转的影响等。
「背景资料 综合实验一机床主轴回转误差运动测试」

实验一机床主轴的回转误差运动测试随着科学技术的飞速发展,很多行业对回转轴差动误差的测量都极为重视,例如,有许多行业的设备都需要高精度的机械零件,它们的形状误差和表面粗糙程度往往要求在0.1~0.25μm以下。
要加工出这样高精度的机械零件,需要多方面的条件来配合才能够满足要求,其中的机床主轴的回转精度是最关键的条件之一。
而测量主轴的误差运动则可以了解机床主轴的回转状态及产生误差的原因,对机床的加工而言,它可以用来预测机床的理想加工条件下所能达到的最小形状误差,并判断产生加工误差的原因。
本实验对如何正确测量机床主轴的误差运动进行一些探讨。
一、有关的基础知识1 轴误差运动理想回转轴线——回转轴运转时,其轴心线在空间的位置稳定不变,即与空间的一条直线相重合,且无轴向的相对移动,我们就称这条固定直线为理想轴线。
但实际上,回转轴组件由于各零件的加工误差及安装误差存在,它的回转轴线在空间的位置是漂移的,并非固定不变。
那么,我们就把回转过程中实际的回转轴轴心线对理想线的相对位置的相对位移定义为回转轴的误差运动。
在实际研究中,往往根据不同的研究对象和目的,可以将理想轴线有选择地和不同的元件“固接”在一起。
例如,我们研究轴承时,可以把理想轴线和轴壳“固接”,这时的误差运动是回转过程中回转轴线对轴承壳体的相对运动,反映出轴承的回转质量,如果研究的是加工设备(如机床),对刀具回转类机床,理想轴线可以与工件“固接”;对于工件回转加工类机床,理想轴线则可与刀具“固接”;这时主轴的回转误差运动就是刀具——工件之间的相对位移,反映出来的是加工误差。
但应注意,回转误差运动是一个复杂的合成误差,它是由几个方向的误差所组成,下面来具体分析(见图1-1):总的来讲,实际回转轴线对理想轴线AB在每一个瞬间的相对运动可以分解为三类五个运动:纯轴向运动z(t),纯径向运动x(t)和y(t),倾角运动α(t)和β(t)。
从分解的五种运动的特点可看出,径向误差运动r(t)是由纯径向运动x(t) 、y(t) 和倾角运动α(t)、β(t)合成的结果。
探讨机床主轴回转生产误差测试

探讨机床主轴回转生产误差测试1 概述在机械生产的过程中,对于机床方面的加工技术中会出现多种的问题,其中包含有加工设计中出现的误差。
错误可以避免,但是误差是无法避免的,可以做到的是将误差的值调整到接近正常值的范围之内。
在机床生产中,主轴的回转方面的误差就是一项需要改进的项目。
主轴回转误差发生后,会对机械的零件加工形状和质量造成一定的影响,直接影响到机械零件表面的平滑程度。
其中主轴回转所产生的误差如下图所示:图1 主轴回转误差立体示意图主轴回转生产误差是在机床主轴运行过程中,在一瞬间回转轴线与平行轴线之间发生的水平方向和竖直方向出现的位移差,也就是通常情况下所说的误差。
其中水平轴线是在主轴运动瞬间运动趋势所得到的位移数据后,经过加权得到的平均位置。
主轴回转生产误差主要有三种具体的形式:单一水平轴向跳动、单一竖直轴向跳动和单一偏角转动。
在这三种形式当中,前两者被统一称作主轴轴向回转误差,这两者出现的误差会在机械零件加工中直接对原件后期生产造成一定的影响。
在出现主轴轴向回转误差时,纠正处理起来相对来说较为简单。
只要在主轴的端处安装有位移传感器,在机床运行过程中,主轴发生偏移就可以在传感器中现实出来,技术人员就可以根据位移误差值对机械进行调整。
同时对于机床主轴的回转生产误差值进行测试,寻找最为合适的生产模型。
下面就测试的相关技术进行研究。
2 误差分离测试技术误差分离技术是通过信息源变换或模型参数估计的方式使有用的信号分量与误差分量相分离的—种测量技术。
测量过程是:通过测量方法和测量装置的适当设计,改变误差分量与有用信号间的组合关系,并从信息源(误差分量与有用信号相混迭的信息源)的不同位置拾取信号,再根据在不同位置处拾取的信号间的联系,建立起误差分量与有用信号间的确定的函数关系,最后经相应的运算处理,使误差得以分离。
测量过程的结构模型,如下图所示:图2 误差分离技术结构模型用位移传感器进行主轴回转误差测量时,由于实际的主轴回转轴心是不可见的,不能直接对其测量,而只能通过对装在主轴上的标准件(标准球或标准棒)或主轴外围轮廓的测量来间接测得主轴轴心运动。
机床主轴回转误差运动测试(精)
综合实验一机床主轴的回转误差运动测试1、实验目的加工高精度的机械零件,对机床主轴的回转精度有非常高的要求。
测量机床主轴的误差运动可以了解机床主轴的回转状态,分析误差产生的原因。
通过机床主轴回转误差运动测试,要求学生:(1) 了解机床的主轴回转误差运动的测试方法。
(2) 熟悉传感器的基本工作原理。
(3) 掌握传感器的选用原则及测试系统的基本组成。
(4) 熟悉并掌握仪器的基本操作方法。
(5) 基本掌握数据处理与图像分析方法。
2、实验原理本实验使用两种方法进行误差运动测试:(1) 带机械消偏的单向法直角座标显示的误差运动测试,见本实验的背景材料中的图1-9。
(2) 电气消偏单向法圆图像显示的回转轴误差运动测试,见本实验的背景材料中的图1-13。
3、实验对象以C6140普通车床的回转主轴为研究对象,测试其在回转情况下的误差运动。
根据测试数据,用图像分析方法表示误差运动,分析误差运动产生的原因。
4、主要实验仪器和设备(1) C6140普通车床(2) 回转精度测试仪(3) 涡流测振仪(4) 信号发生器(5) 双踪示波器(6) 数字式万用表(7) 可调偏心的测量装置5、实验步骤5.1 带机械消偏的单向法直角座标显示的回转轴误差运动测试(1) 按照仪器的操作说明,熟悉系统所用各仪器控制面板上的旋钮、按键的作用及操作方法;(2) 按照原理框图正确地将系统中各仪器的信号线连通;(3) 调整标准盘1(作为补偿信号)和标准盘2(作为误差的测量信号)的偏心量,标准盘2的偏心量e2应尽可能小,仅稍大于被测量轴回转误差值,以保证得到信号即可,偏心量一般调整到0.03mm~0.05mm;标准盘1的偏心量e1应尽可能调大,大到使被测量轴回转误差值相对于偏心量可以忽略不计,及得到一个接近于纯偏心信号的光滑曲线,但因受涡流传感器工作间隙的限制,偏心量无法无限制地加大,一般调到0.40mm~0.60mm即可,并使e1和e2相差180o;(4) 经指导老师检查系统连接正确后,接通电源预热仪器;(5) 按测振仪使用要求调整好涡流传感器的工作间隙;(6) 调整好机床转速,启动机床;(7) 调整测振仪灵敏度,使之满足下面的关系式:e1.k1传感.k1测振仪= e2.k2传感.k2测振仪(8) 将满足以上关系式的两路输出信号经加法器(借用回转精度测试仪后面板上的加法器,此时应将总接口插板抽出)相加,在示波器上得到误差曲线,曲线上最高点与最低点的高度差即为圆度误差的相对值,曲线最大的垂直度即为粗糙度的相对值;(9) 标定,方法为:用正弦信号发生器输出一标准正弦信号,使其幅值为测振仪当前档位(如30um档)的满量程输出的电压值,将该正弦信号送入加法器输入端,在示波器上得到一幅值为A mm的正弦信号,则该测量系统的标定系数为30um/A mm;(10) 求出绝对误差=相对误差(mm)×30um/A mm;(11) 停机床、关仪器,并拆除仪器的所有连接线,整理现场。
四轴联动加工中心回转轴几何误差参数的辨识及测量

[ 5] 刘丽 冰 . 数控机 床在 线检 测及 误差 补偿 关键 技术 研究 [ D ] . 天津: 天津大学 , 1998.
IDENTIFICATION AND INSPECTION ABOUT GEOMETRIC ERROR PARAMETERS OF ROTATION COORDINATE FOR 4-AXIS MACHINING CENTER
天津大学学报 第 34 卷 第 4 期 2001 年 7 月 JO U RN A L O F T IA N JI N U NI VER SIT Y V ol. 34 N o . 4 Jul. 2001
四轴联动加工中心回转轴几何误差参数的辨识及测量X
郭红旗1, 赵小松2, 刘又午1, 仝庆根3
图 4 径向跳动测量结果 Fig. 4 Metrical result of radial errors
图 7 回转 精度测量值 Fig. 7 Metrical result of rotary errors
图 5 轴向跳动测量结果 Fig. 5 Metrical result of axial errors
图 11 相对 x 轴的角误差 Fig. 11 Angle error about x axis
图 12 相对 y 轴的角误差 Fig. 12 Angle error about y axis
图 13 相对 z 轴的角误差 Fig. 13 Angle error about z axis
3 结 论
微电子技术、新型传感器和测量装置推动了数控 机床空间误差补偿技术的发展 . 综合误差动态补偿、 实时反馈补偿及刀具自动调整技术等方面都取得了许 多研究成果 . 国内外丝杠误差动态补偿、热变形误差 补偿和几何误差补偿都有不同程度的应用, 当前研究 热点在三坐标数控机床上 . 对带有回转坐标机床( 如 四坐标、五坐标数控加工中心) 的研究还处于起步阶 段, 美国 Michig an 大学、P ur due 大学及天津大学对多 坐标数控加工中心误差建模进行了探索 . 由于对回转 坐标建模方法和回转误差参数的检验缺乏有效手段, 研究有待进一步地深入 . 英国 Renishaw 公司的 RX10 回转精度测量仪可测量回转方向的转角误差, 但对于 因回转引起的其它 5 个自由度的误差却无能为力[ 2] . 作者在三轴加工中心的 21 项误差参数测量和辨 识基础上[ 5] , 以 M akino 加工中心为研究对象, 采用英 国 Renishaw 公司的回转精度测量仪与传统的方法相 结合, 对机床径向跳动和轴向跳动以及回转方向的转 角误差进行测量, 通过分析、计算, 在忽略位置误差参 数的基础上[ 2] , 分析辨识出回转轴的运动误差参数 .
第2讲 回转误差的测试原理PPT课件

m 11 m 12 m 13 i3i0 T 30T 10T 2 1T 32m 21 m 22 m 23i3j0
m 31 m 32 m 33 i3k0
j3i0 k3i0 j3j0 k3j0 j3k0 k3k0
根据姿态矩阵的定义,
T
0 3
中的m31为o3x3与o0z0夹角的余弦,因为这个夹角接近90,o0z0与
j3i0 k3i0 j3j0 k3j0 j3k0 k3k0
•
根据姿态矩阵的定义,T 30中的h13为o1x1轴与平面镜法线o3z3
夹角的余弦,因为这个夹角接近90,所以h31就是自准直仪在
o1x1方向上的读数;同理分析 向上的读数。
中T 的30 h23就是自准直仪在o1y1方
f x ( 2 n π i) h 1 3 y 2 c o s 2 n π i x 2 s i n 2 n π i y y ( 2 n π i)
动产生影响,造成回转运动误差。轴系在回转过程中,回转轴线的各个
瞬时位置相对其平均回转轴线的位置和姿态都发生变化,其变化量的大 小定义为回转运动误差。回转运动误差可分为如下几种:
•
1.倾角回转误差(Wobble)
•
当轴系连续旋转时,瞬时轴线与平均回转轴线形成的连续变化的角
度。这些角度在与轴线垂直的平面内可在互相垂直的方向进行分解,它
j1,k1)相对于坐标系o0x0y0z0(与坐标轴o0x0,o0y0和o0z0固联的单 位向量分别为i0,j0,k0)的方向余弦阵A,即姿态矩阵为:
i1 i0 Ai1 j0
i1 k0
j1 i0 j1 j0 j1 k0
k1 i0
k1
j0
k1 k0
_____
_____
主轴回转精度测量实验

东北大学机械设计及理论研究生1105班王晓邦1100541轴回转精度概念及分析机床的工作性能直接影响了零件的加工精度,机床主轴是工件或刀具的位置基准和运动基准,实验结果表明:精密车削的圆度误差约有30%~70%是由于主轴的回转误差引起的,且机床精度越高,所占比例也越大,通过回转轴运动误差的测定,可对机床进行状态监测和故障诊断,预测机床在理想加工条件下所能达到的最小形状误差和粗糙度,还可用于机床加工补偿控制和评价主轴的工作精度,以及判断误差产生的原因。
因此,主轴回转运动误差的测量非常重要。
要想对主轴进行准确的测量,首先必须明确主轴回转精度的概念。
对于主轴的要求集中到一点,就是在运转的情况下它能够保持轴心线的位置稳定不变,也就是所谓的回转精度。
主轴的回转精度不但和主轴部件的制造精度(包括加工精度和装配精度)有关。
而且还和受力后的变形有关,并且随着主轴转速的增加,还需要解决主轴轴承的散热问题,不过,主轴部件的制造精度是主轴回转精度的基础。
回转精度是主轴系统特性的重要指标之一,也是机械加工中主要运动精度之一。
对于车削类加工,将直接影响被加工件的圆度,内、外圆柱面对端面的垂直度等:对于铣削类加工,将影响平行度等。
1实验目的1)了解机床主轴回转误差运动的表现形式、定义、评判原则、产生原因及对机床加工精度的影响。
2)懂得主轴回转误差的测量方法及实验原理。
3.实验原理(原理框图、仪器性能)主轴回转时,在某一瞬时,旋转的线速度为零的端点联线为主轴在该瞬时的回转中心线。
理想情况下,主铀回转中心线的空间位置,相对于某一固定参考系统应该是不随时间变化的。
实际人由于主轴轴颈不圆、轴承存在缺陷、主轴挠曲、轴支承的两端对轴颈中心线不垂直以及振动等原因,使得主轴回转中心线在每一瞬时都是变动的。
因而,在进行测试数据处理时,往往只能以回转主轴各瞬时回转中心线的空间平均位置作为回转主轴的“理想”中心线。
主轴瞬时回转中心线的空间位置相对理想中心线空间位置的偏差,也就是回转主轴的瞬时误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
绕向量kb旋转形成构件坐标系,这个构件坐标系再绕参考 坐标系中的向量ka旋转形成新的坐标系相对于参考坐标系
的姿态矩阵。 左“基”右“一”。
10
2.5 小角度旋转变换的性质与分解
定理8(无序性) 在满足一定的工程条件下,两个小角度旋转变换的合成是 无序的。
定理9 小角度旋转变换的分解
绕基准坐标系o0x0y0z0的单位向量n旋转小角度 后形成的坐标系,它等效 于绕基准坐标系的x0轴先旋转角x,再绕新形成坐标系o1x1y1z1中的o1y1 旋转y 形成的坐标系o2x2y2z2,最后绕o2x2y2z2的o2z2轴旋转z形成。 证明:
动产生影响,造成回转运动误差。轴系在回转过程中,回转轴线的各个
瞬时位置相对其平均回转轴线的位置和姿态都发生变化,其变化量的大 小定义为回转运动误差。回转运动误差可分为如下几种:
•
1.倾角回转误差(Wobble)
•
当轴系连续旋转时,瞬时轴线与平均回转轴线形成的连续变化的角
度。这些角度在与轴线垂直的平面内可在互相垂直的方向进行分解,它
n cos sin sin sin cos T
Rot(n, ) Rot(x, cos sin )Rot(y, sin sin )Rot(z, cos )
_____
_____
11
x cos sin
z cos
y sin sin
, ( x )2 ( y )2 ( z )2
_____
_____
2
2 向量与方向余弦阵的基本性质
✓ 向量的基本性质。 ✓ 方向余弦阵的基本定义。 ✓ 绕任意轴旋转的方向余弦阵的推导。 ✓ 方向余弦阵的基本性质:正交性,归一性,有序性,
相对性,特征值,特征向量。 ✓ 小角度旋转变换的性质与小角度向量的分解。
_____
_____
3
2.1 向量的基本性质
, tan y
,
x
cos
z
( x )2 ( y )2 ( z )2
结论:小角度的旋转变换可以象向量一样进行正交分解。可以小角 度是一个向量,但大角度旋转变换是不可能的。
3回转误差的基本概念
✓ 3.1回转误差的基本定义
✓ 刚体空间六自由度的定义,引出瞬时回转轴线,平均回转轴线,三 种回转误差。
j1,k1)相对于坐标系o0x0y0z0(与坐标轴o0x0,o0y0和o0z0固联的单 位向量分别为i0,j0,k0)的方向余弦阵A,即姿态矩阵为:
i1 i0
A
i1
j0
i1 k0
j1 i0 j1 j0 j1 k0
k1 i0
k1
j0
k1 k0
_____
_____
6
2.3 绕任意轴旋转变换的方向余弦阵
1
0
0 1
yx(())
cos
sin
sin cos
0 0
y ( ) x ( )
1 0
0 1
1
T32
Rot(x2 , x2 ) Rot( y2 , y2 )
0
y2
0 1
x 2
y2 x 2
1
h11 h12 h13 i3 i0
T30 T10T21T32 h21
_____
T10 Rot(x0 , x0 ) Rot( y0 , y0 ) T21 Rot(x1, x1( )) Rot(y1, y1( )) Rot(z1, )
T32 Rot(x2 , x2 ) Rot( y2 , y2 )
m11 m12 m13 i3 i0
T30 T10T21T32 m21
3.2.2 平均回转轴线 某一时刻回转轴上相对于固定坐标系的线速度为零的点的集合为瞬时 回转轴线。平均回转轴线是相对固定坐标系不动的一条参考线,这条 参考线是旋转轴系各瞬时回转轴线的平均位置。只有理想主轴各瞬时 回转轴线才与平均回转轴线重合。理想的回转轴绕空间一根固定的轴 线运动,它的平均位置就是它本身的位置。因此,平均回转轴线也可 理解为回转轴系的理想轴线。当回转误差中不含系统误差时,按数理 统计学原理可知,取足够多的回转圈数,求得的平均轴线是理论回转 轴线的最可能位置。
标系相对于基准坐标系的方向余弦阵。
A nnT (1 cos ) I cos nsin
n是方向余弦阵A的单位特征向量。
绕坐标轴旋转的方向余弦阵验证A
8
2.4 方向余弦阵的基本性质
• (1)归一性 :姿态矩阵的任一行向量及列向量的模为1。
• (2) 正交性:姿态矩阵的任意两个行向量是正交的,任意两个 列向量也是正交的。
T30中的m32就是敏感o3y3上的水平仪的读数。忽略二阶小量经计算得
m31 y2 [ y0 y1 ( )]cos [ x0 x1 ( )]sin
m32 x2 [ y0 y1 ( )]sin [ x0 x1 ( )]cos
k
x1( ) axk cos k bxk sin k i2
y2
x2 y1 x1 y3
x3
y0
x0
z2
z1
z3
o4
z0
z0 z1 x
4
y1 y0 y 4x1 x0
1. 自准直仪 2. 主轴 3. 平面镜 图 坐标系建立过程示意图
1
T10
Rot(x0 , x ) Rot( y0, y )
0
0 1
y x
y x 1
T21 Rot(x1, x ( )) Rot( y1, y ( )) Rot(z1, )
k
y1( ) ayk cos k byk sin k i2ax2ຫໍສະໝຸດ cos 2cos
1 2
ax2 (cos 3
cos )
_____
_____
1.“用水平仪测试倾角回转误差的数据处理”,哈尔滨工业大 学学报,2006年6月 2.竖直轴系倾角回转误差的两种测试方法的比较 ,中国惯性 技术学报,2000.9 3.带框架轴系倾角回转误差的测试结果分析 ,工具技术, 2000.9
_____
_____
14
• 2.5.3 回转运动误差
•
作为回转运动的轴系,可将其看成为一刚体。它与自由运动之刚体
之差别在于:在固定坐标系中,它只有一个旋转运动的自由度,其它几
个自由度被约束。满足这种条件时,回转轴即为理想轴。事实上,任何
精密轴其被约束的自由度都在作微小量的运动,并对轴系预定的旋转运
的单位特征向量满足。
na nb
定理7(相对性) 对于姿态矩阵A和B
A
Rot(k
a
,
)
k
ak
T a
(1
cos
)
I
cos
k
a
sin
B
Rot(k
b
,
)
kbk
T b
(1
cos
)
I
cos
kb
sin
AB可表示先在参考坐标系中绕向量ka旋转形成构件坐标 系,再绕构件坐标系中的向量kb旋转形成新的坐标系相对 于参考坐标系的姿态矩阵;AB也可表示先在参考坐标系中
• 平均值的求法: • 一次谐波两项幅值求法: • 一次谐波的讨论:轴系本身的一次谐波,李萨育图。 • 回转误差的求法: • 两个方向的回转误差 • 两个方向回转误差的合成 • 回转误差的评定
21
5 水平仪测试法
_____
_____
22
z0
z01 z1 z0
y1
x0
x0
1
y0
2
x0
o0,o1
y0
15
xt(z)
A
yt
B
B0
xt
ot
zt(z)
yt(z) A0
yt(z)
zt xt(z)
图 轴系几何轴线的空间运动
1
zt (x )
yt (
0
x
)
zt (x )
1 0 0
yt (x )
0 1 0
xt (x )
yt
(
x
)
zt (
1
x
)
4 自准直仪-平面镜测试法
17
• 自准直仪
坐标系的建立过程: 自准直仪坐标系、轴套坐标系、轴坐标系、平面镜坐标系
可用二维自准直光管进行测试。
•
2.径向回转误差(Runout)
•
轴系连续回转时,瞬时回转轴线上某点至平均回转轴线垂直面上的
位移量。这些位移量在与轴线垂直的平面内可在互相垂直的方向进行分
解,因此可在相互垂直的方向上放置两个位移传感器进行测试。
•
3.轴向回转误差(Axial slip)
•
轴系在连续回转时,回转轴线上的某点在轴线方向上的位移量。
nr0 n
C
AB
D
OC (r0 n)n
r1 r0
n
nr0
O
图1
r1 OB OC CB n(r0 n) (n r0 n) cos (n r0 )sin
[nnT (1 cos ) I cos nsin ]r0
Ar0
_____
_____
• 因为向量是任意的,可以认为矩阵A为一个 基准坐标系绕向量n旋转 角后形成新的坐
中T的30 h23就是自准直仪在o1y1方
fx
(2πi ) n
h13
y2
cos
2πi n
x 2
sin
2πi n
y
y
(
2πi n
)
f
y
(
2πi n
)
h23
y2
sin
2πi n
x 2
cos
2πi n