CPM1A编程手册
CPM1A2A2AH2C 编程手册第九章
SRM1(-V2)循环时间与I/O响应时间第8-3节编码助记符ON执行时间(μs) 条件(上限:最小;下限:最大)OFF执行时间(μs)--- ZCP 45.0 一个字与一个常数范围相比较 3.046.5 一个字与一个字范围相比较69.0 *DM与*DM相比较544第9章错误检测与排除本章介绍了如何诊断并纠正PC运行过程中可能发生的软硬件错误。
9-1介绍5469-2手持式编程器操作错误5469-3程序错误5479-4用户定义错误5489-5运行错误549 9-5-1非致命错误5499-5-2致命错误5509-5-3其他错误550 9-6错误日志5519-7Host Link错误5539-8错误检测与排除流程图553545手持式编程器操作错误第9-2章9-1 介绍PC错误通常可以划分为如下四种类型:1,2,3... 1.程序输入错误在输入程序或试图操作PC使其准备运行时,可能发生此类错误。
2.编程错误在使用程序检测方法检测程序时,此类错误可能出现。
3.用户定义错误有三条指令用户可用来定义他自己的错误或信息。
运行过程中当特定条件(由用户定义)发生时,将执行这些指令。
4.运行错误开始执行程序后,此类错误可能出现。
a)非致命运行错误发生这类一个或多个错误后,PC运行和程序执行将继续。
b)致命运行错误发生此类任何一个错误后,PC运行和程序执行将停止,并且PC所有的输出都变OFF。
发生PC错误时,PC上的指示灯将作出提示,如果与手持式编程器或主机相连接,那么将在编程器或计算机上显示错误信息或错误编码。
SR25300~SR25307中包含这些错误编码。
对于刚刚发生的错误而言,其错误类型以及错误发生的时间将被记录在PC的错误日志区中。
将在551页上作详细阐述。
SR和AR区中提供的标志与其他信息中的存储区可用于错误的检测与排除。
参阅第三章存储区域中的存储区域清单。
注除上述错误以外,如果PC作为主机链接系统中的一部分,将有可能发生通信错误。
CPM1A-AD041 操作手册(中文)

3、对于不使用的输入,将输入通道设置为OFF,并且将电压输入端子V IN和COM短路。
模拟输入设备的配线
CPM1A-AD041
Label
Signal
V IN1
电压输入1
I IN1
电流输入1
COM1
公共端1
V IN2
电压输入2
I IN2
电流输入2
COM2
公共端2
V IN3
电压输入3
I IN3
电流输入3
■模拟量输入单元的使用
连接模拟量输入单元
模拟量输入:0 to5V, 1 to 5V,
0 to 10V, -10 to 10V,
0 to 20mAm, 4 to 20mA
设定电压/电流输入并设定
平均值功能
.连接模拟输入设备
写入量程控制字
模拟量输入:读出转换数据
模拟量输入
I/O分配
模拟输入单元的通道分配与其他的扩展单元或扩展I/O单元是一样的。通道的分配是从分配给CPU单元或前一个扩展单元或扩展I/O单元的最后一个通道开始的。当“m”为分配给CPU单元或前一个扩展单元或扩展I/O单元的最后一个输入通道,“n”为其最后一个输出通道时,模拟量输入单元的通道分配如下所示:
第10章 欧姆龙CPM1A系列PLC步进控制指令
湖北祥辉电气自动化培训中心
步进控制指令 步进控制程序的结构 步进控制程序的编程
步进控制概述
把一个较大的程序分成若干个程序段(对应实际的某 些操作)。一个程序段称为一个步,用指令来控制各 步执行的顺序——步进控制程序。
步C开始
25313
01002 步C
功能:步结束指令。 当所有步都执行完毕时,要 安排SNXT(09) B (B是虚控 制位、无实际意义)和 STEP 指令以结束步程序 。
二、 步进控制程序的结构
1. 步进程序的基本结构
每一 步都由具有执行条件的 SNXT(09) B开始,其后紧随 无执行条件的STEP(08) B。
STEP(08) B之后是步的内容
当执行步进程序时,在执行完上一步、启动下一步之 前,可将上一步使用的定时器、数据区等复位。这样, 在以下各步程序中还可以重复使用这些资源。
一、 步进控制指令
SNXT(09) B STEP(08) B
SNXT(09)B STEP(08) B
B:步的控制位号
STEP(08)
STEP(08)
功能:当SNXT指令的执行 条件为ON时,结束上一步 的执行、复位上一步用过的 定时器和数据区,并启动以 B为控制位的、以STEP B定 义的下一个步。
HR0001
启动步B
25313
STEP(08) HR0001
步B开始
01001 步B
00003 SNXT(09) HR 0004
STEP(08) HR 0002
复位步B 启动步E
25313
01002 步C
00004 SNXT(09) HR 0003 STEP(08) HR 0003
欧姆龙CPM1A-MAD01模拟量输入输出单元使用手册
CPM1A-MAD01
模拟量输入/输出单元
使用说明
感谢您使用欧姆龙的产品。
请在
使用该产品之前先阅读本使用说明,
并请保存该使用说明。
上海欧姆龙自动化系统有限公司
外部端子分布图:
1、输入端子
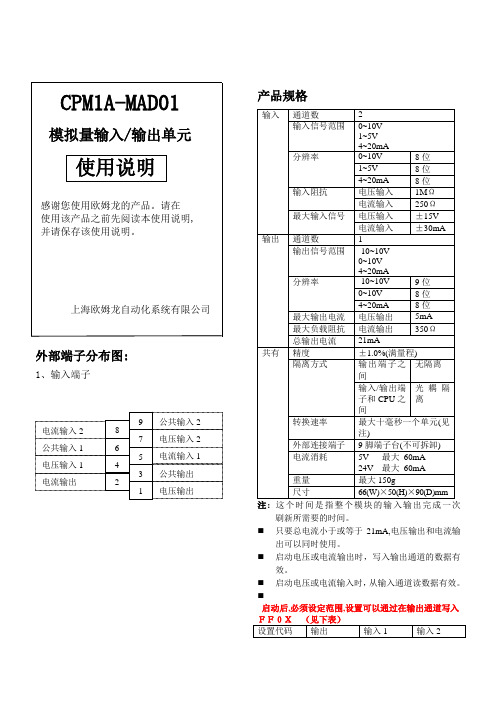
产品规格
注: 这个时间是指整个模块的输入输出完成一次 刷新所需要的时间。
⏹ 只要总电流小于或等于21mA,电压输出和电流输出可以同时使用。
⏹ 启动电压或电流输出时,写入输出通道的数据有效。
⏹ 启动电压或电流输入时,从输入通道读数据有效。
⏹ 启动后,必须设定范围,设置可以通过在输出通道写入
注:每次上电把设置值写入输出通道,此时
CPM1A-MAD01将不进行AD/DA 的转换。
通道分配
通道的IR 位分配
0:正电压输出 1:负电压输出
b : 断线位 0:没断线 1:断线
注:1.只有当使用±10V 量程时,符号位才有用。
2.断线位在设置为1-5V/4-20mA, 电压/电流输入 低于1 V/4mA.
输出接线图
输入接线图
数据转换
输出 输入
输出 10V/20mA
5V/12mA
0V/4mA
-5V -10V
10V/5V/20mA
5V/3V/12mA
0V/1V/4mA
输入
00 80 FF +
-
_ _。
OMRON CPM1A PLC教程(三)

上位机可以在线修改PLC的某些 设定值和当前值、改写PLC的用 户程序等。
RS-422 适配器
CPM1A 主 机
RS-422 适配器
CPM1A 主 机
RS-422 适配器
CPM1A 主机
2.NT Link通信
在装有软件的计算机上完成做画面、参数设定等操作.
专用 软件 下载到PT中 计算机 PT PT 可 以 实 时 显 示 PLC的各种数据及 工作状态信息,可 对PLC控制系统进 行监控。 PT
使用高速计数器时,必须在系统设置区中进行设定。
高速计数器具有中断功能。
PLC利用高速计数器,可以实现中断控制。
5. 外部输入中断功能
外部输入中断功能是解决快速响应问题的措施之一。 不同的型号,外部输入中断的输入点是不同的。 响应中断时,停止执行主程序而转到中断处理子程序。 执行完中断处理子程序,再返回断点继续执行主程序。 使用输入中断功能时,必须在系统设定区中进行设定。
CompoBus/S 主单元 CPM1A主机
OMRON SYSMAC CPM1A
CompoBus/S I/O 链接单元
当主单元是CQM1-SRM21时,最多可连8个从单元。
内 容
概 述 子程序控制指令
基 本 指 令
常用的应用指令
高速计数器控制指令
脉冲输出指令
数据传送和数据比较
数据移位和数据转换
中断控制指令
外设端口
输出点LED
2. CPM1A 40点的主机的面板结构
二、 CPM1A系列PLC的I/O扩展单元
1. I/O扩展单元的规格和类型
类 型
8点型(输入8点) 8点型(输出8点) 20点型 (输入12点) (输出8 点)
欧姆龙编程器的使用手册
二、编程器的使用 (4)一、编程器的面板及功能 (1)2、编程器的功能 (3)1、编程器的面板 (2)目 录第一章编程器的使用第一章 编程器的使用可与CPM1A配合使用的编程器为CQM1—PRO01或C200H—PRO27,两种编程器基本相同。
一、编程器的面板及功能1、编程器的面板编程器的模式:编程器共有三个模式供选择编程(PROGAM)模式——CPM1A处于停止状态,此时可以进行用户程序的写入、修改、清除内存,以及程序检查等针对程序的操作。
监视(MONITOR)模式——CPM1A处于运行状态,输入输出的处理同运行模式一样。
在这种模式下可实现CPM1A的运行状态的监视,接点强制ON/OFF及定时器/计数器的设定值/当前值的修改,通道数据当前值的个修改等等。
主要用于系统试运行调整。
运行(RUN)模式——用于CPM1A的运行状态。
这种模式下,可进行CPM1A的运行监视,但不能用编程器来修改接点的强制ON/OFF及定时器/计数器的设定值/当前值。
*当CPM1A上不加编程器时,通电后PLC自动处于RUN运行状态下;当PLC上加有编程器时,PLC的工作方式取决于编程器上的工作方式选择开关的位置。
- 1 -- 2 -2、编程器的功能名 称 功 能1 内存清除 用户程序、PLC系统设定、各继电器、T/C、DM的数据清除2 地址建立 在进行程序输入、读出、插入、删除等操作时,建立程序存储器地址3 程序输入 进行程序的输入、指令的修改和设定值修改等操作4 程序读出 读出程序存储器的内容,在运行、监控方式下可读出触点的通断状态5 程序检查 确认程序的内容是否符合编程规则,程序中有错时,出错的地址及内容将显示出来6 指令检索 检索程序中的指令7 触点检索 检索程序中指定的各继电器、定时器/计数器的触点8 指令插入 在原有程序中间插入指令程序9 指令删除 在原有程序中删除部分指令程序10 位、数、字监视 监视继电器、定时器、计数器、数据存储器的数据内容11 多点监视 同时进行6点或通道的监视。
omron SYSMAC CPM1A-V1系列可编程控制器 说明书
输出输入形式 继电器输出 晶体管输出(漏型) 晶体管输出(源型) 继电器输出 晶体管输出(漏型) 晶体管输出(源型) 继电器输出 晶体管输出(漏型) 晶体管输出(源型) 继电器输出 晶体管输出(漏型) 晶体管输出(源型) 继电器输出 晶体管输出(漏型) 晶体管输出(源型) 继电器输出 晶体管输出(漏型) 晶体管输出(源型) 继电器输出 晶体管输出(漏型) 晶体管输出(源型) 继电器输出 晶体管输出(漏型) 晶体管输出(源型)
ৃ㓪 ࠊ఼
ೈᎹ
⦄എ㔥 㒰䆒
种类
■CPU单元
形状
10点输入 输出CPU 单元
ⳕᏗ㒓 ⳕᎹᯊ䆒
᮴㒓䆒
20点输入 输出CPU 单元
ৃ㓪 㒜ッ
,7g䕃ӊ 㒘ӊ
ѻક㒘
30点输入 输出CPU 单元
Ԏ᳡㋏㒳 ব乥఼
40点输入 输出CPU 单元
电源 AC电源 DC电源 AC电源 DC电源 AC电源 DC电源 AC电源 DC电源
组2(G2)
温度传感器单元(CPM1A-TS002/102) 模拟量单元(CPM1A-AD041)
(CPM1A-DA041)
关于上述组 (G1、 G2), 根据CPU可连接的单元的组合如下所示 :
表2)可能的扩展单元组合
扩展1
扩展2
扩展3
G1
G1
G1
G2
G1
×
* 扩展单元1、 2、 3能以任意顺序安装 注. 如果有一个NT-AL001连接到RS-232C端口上了,只能安装一个扩展单元。
ƽ䕧ߎ⚍᭄˖4⚍
Ƶ㒻⬉఼䕧ߎCPUऩܗ CPM1A-30CDR-D-V1
Ƶԧㅵ䕧ߎCPUऩܗ CPM1A-30CDT-D-V1˄ⓣൟ˅ CPM1A-30CDT1-D-V1˄⑤ൟ˅
CPM1A2A2AH2C 编程手册第六章
第6章梯形图编程本节说明了编写一个基本梯形图程序的基本步骤和概念。
它介绍了用于构建梯形图基本结构和控制它执行的指令。
用于编程的完整的指令集在第7节指令集中介绍。
6-1基本步骤3306-2指令术语3306-3基本梯形图331 6-3-1基本术语3316-3-2助记代码3326-3-3梯形指令3336-3-4输出和输出非3366-3-5结束指令3376-3-6逻辑块指令3376-3-7多重右侧指令规则3456-3-8指令行分支3456-3-9跳转349 6-4控制位状态350 6-4-1置位和复位3506-4-2上升沿微分和下降沿微分3516-4-3保持3516-4-4自保持位(自锁)352 6-5工作位(内部继电器)3526-6编程注意事项3546-7程序运行356329指令术语6-1 基本步骤第6-2节编写程序可分为几个基本步骤。
可以复印附录D I/O 分配表 和附录E 程序代码 表 中给出的表格帮助编程。
1, 2, 3... 1. 首先列出一个所有I/O 设备和已经分配给它们的I/O 点的目录,并且准备一张写出分配给每一个I/O 设备I/O 位的表格。
2. 如果你使用LR 位链接2个PCs ,那么准备一张写出这些使用的位的表格。
3.确定工作位用什么字,并准备一张当你使用它们时你能分配它们的表格。
.4 同样准备一张TC 编号和跳转编号的表格,这样在你使用它们时就能分配它们。
记住,一个TC 号在程序中仅能定义一次;跳转号01~99在每个程序也 只能使用一次。
(TC 编号在7-15定时器和计数器指令中介绍;跳转编号在 本节后面说明) 5. 画梯形图。
6.将程序输入到CPU 单元。
当使用手持编程器时,需将梯形图程序转换为助 记符程序形式。
7. 检查程序有无语法错误并更正错误。
8. 运行该程序以检查是否存在运行错误并更正错误。
9.当整个控制系统安装好并准备使用时,运行该程序并按要求仔细调试。
梯形图编程和转换为助记代码的基础知识在6-3基本梯形图 中描述。
第四章2-CPM1A指令系统
B — TIMH(15)
操作数的含义及范围
TIMH
TIMH(15)B SV
同TIM指令
SV
功能:高速定时器指令。定时时间为SV×0.01s,其余同TIM指令。 3.CNT指令 CNT指令的格式、逻辑符号、操作数的含义及范围如表11.7所示。
表11.7 CNT指令
当JMP的执行条件为OFF时,跳过JMP和JME之间的程序转去执行JME之后的程序; 当JMP的执行条件为ON时,JMP和JME之间的程序被执行。
11.1.3 定时器/计数器指令 1.TIM指令 TIM指令的格式、逻辑符号、操作数的含义及范围如表11.5所示。
表11.5 TIM指令
指 令 格 式 逻辑符号 操作数的含义及范围 B是定时器的TC号,范围为:000~ 127。 SV是定时器的设定值(BCD 0000~ 9999),其范围为:IR、SR、HR、 AR、LR、DM、*DM、#
表11.8 CNTR指令 指 令 格 式 逻辑符号 ACP — CNTR(12) SCP — B B R ——
SV
操作数的含义及范围
CNTR
CNTR(12) B SV
同CNT指令
11.2
数据传送和数据比较指令
11.2.1 数据传送指令 CPM1A系列提供多种数据传送指令,在指令前加@符号是指该指令是微分 型指令,它只在执行条件由OFF变为ON时执行一次,此后即使执行条件一 直为ON,指令也不再执行。 1.MOV(21)指令 MOV(21)指令的格式、逻辑符号、操作数的含义及范围如表11.9所示。
XFER(70)
XFER(70) B S D
XFER(70) B S D
第9章 欧姆龙CPM1A系列PLC的指令系统
OUTNOT
输出逻辑运算的“非”
继电器 类型
输出 继电器
内部辅助 继电器
特殊 继电器
保持 继电器
辅助记忆 继电器
链接 继电器
B的内容
01000~01915
20000~23115
23200~2551 5
HR0000~HR01915
AR0000~AR01515
LR0000~LR01515
电气控制与PLC原理及应用(欧姆龙机型)(第4版)
数据(地址) 00001 #00 00002 01000 #00
电气控制与PLC原理及应用(欧姆龙机型)(第4版)
9.2 专用(功能)指令
使用JMP和JME指令应注意以下几点: (1)一般要求JMP和JME成对出现,但有以下特例: ① 当不同跳转起点跳向同一个跳转终点时,不同的JMP指令可以后跟相同 目标标号;但JME后的目标号不能重复。此时是多个JMP指令对一个JME 指令。 ② 当JMP语句后跟的标号为通道号时,即意味着此JMP对应多个出口, JMP可以根据通道号的取值不同而转向不同的跳转结束语句,此时为一个 JMP指令对应多个JME指令。 (2)JMP和JME之间不能使用高速计数指令。 (3)要注意JMP-JME和IL-ILC指令之间的区别。
形 图 序号 1 2
指
令 指令 LD OR
表 数据(地址) 00001 00002
电气控制与PLC原理及应用(欧姆龙机型)(第4版)
9.1 基本指令
6.ORNOT指令
指 令 格 ORNOT 式 B 逻 辑 符 号 功 能 编 程 操 作 ORNOT+继电器编号
ORNOT
逻辑“或非”操作
继电器 类型
指 令 格 式 B 逻 辑 符 号 功 能 编 程 操 作 ANDNOT+继电器编号
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
OMRON可编程控制器CPM1A编程手册沈阳鹭岛资讯科技有限公司2003.3编辑说明本手册是为适应OMRON PLC中国用户的需要,根据OMRON 公司的出版物W353-E1-3 ( 2001.2 修订)SYSMAC CPM1/CPM1A/CPM2A/CPM2C/SRM1(-V2) Programmable Controllers Programming Manual的相应内容,翻译;并基于实用,精炼的原则,编辑整理而成。
特此说明。
沈阳鹭岛资讯科技有限公司2003.3目录页第一章PLC的设置1-1 用Cx-Programmer 3.0 的设置项目 (5)1-2 DM 设置 (6)第二章特殊功能2-1 中断功能 (12)2-2 高速计数功能 (17)2-3 快速响应功能 (26)2-4 脉冲输出功能 (26)2-5 模拟控制功能 (32)第三章扩展单元3-1 模拟量输入输出单元 (33)3-2 温度传感单元 (40)3-3模拟量和温度传感输入单元 (44)3-4 CompoBus/D( DeviceNet) I/O 单元第四章通信功能4-1上位链接命令(Host Link 协议) (53)4-2与其它PLC进行1对1,1对N链接 (53)第五章存储区5-1存储区结构和功能 (55)5-2 I/O 分配 (61)第六章梯形图编程6-1 基本步骤6-2 指令术语6-3 基本梯形图6-4 位控指令6-5 工作位(内部继电器)6-6 编程注意事项6-7 程序的执行第七章指令系统7-1CPM1A指令的说明 (62)7-2指令系统 (63)第一章PLC 的设置OMRON PLC 的基本操作和输入输出处理的功能是可以更改的。
用户可以根据需要来改变。
这种操作叫设置。
设置的参数叫设定值。
对PLC的不同设置可实现功能的多样性和对用户和使用场合的灵活性。
OMRON PLC 的设置在底层的操作是通过对数据存储区中DM6600—DM6655 的规定字的相应位的1,或0(二进制;或BCD码的0--9)的设置来实现的。
随着软件技术的发展,现在用户已可以不必经过繁琐的DM设置,而利用友好的人机界面,在计算机屏幕上,方便地对各可选项进行选择来实现功能设定。
只要把该设定下载到PLC中,就完成了设置。
这样作需要的是一台电脑和相应的编程软件。
OMRON PLC的编程软件是Cx-Programmer ( 3.0).用便携(笔记本)电脑也可方便地实现现场修改程序,修改设定和监视程序的运行。
如果用户仍然使用编程器,则仍需对DM6600—DM6655 的规定字的相应位的进行设置。
1.1用Cx-Programmer 3.0 的设置项目Cx-Programmer 是多文挡界面。
左面的窗口的树状结构中有一个设置节点。
称为设置(Settings).双击它,就会出现一设置对话框。
该对话框是标签式的。
每一标签对应一种设置。
点击不同的标签会出现不同的对话界面。
这些界面上还有一些设置子项。
分别介绍如下:1.1-1 启动(StartUp)启动模式(Mode) PLC上电时的工作模式。
分下列几种:编程模式(Programming)监控模式(Monitor)该模式下,PLC已运行,并可监控。
运行模式(Run)上次关机前使用的模式(Per-Powerdown)连接编程工具模式(Use Programming Console)I/O 保持(IOM Hold)输入输出位在启动或停止运行时是保持原状态还是复位。
强制位(Forced Status)在监控中被强制的位在启动或停止运行时是保持原状态还是复位。
编程器语言:英语;日语。
程序保护:保护;不保护。
电容器失效造成的存储器错误:记录;不记录。
1.1-2 扫描时间(Cycle Time)扫描监视时间(Cycle Monitor Time)固定为120ms; 设定单位为10ms; 100ms; s ; 设定值。
这个设定是用来检验非常长的扫描周期,如果超过监视时间则产生一个致命错误信号。
扫描时间(Cycle Time)可变(由程序长短决定);设定最小时间----ms。
串口通信的服务时间(Servicing Time)外设口;RS-232 口。
这个设定的意思是扫描时间的百分之几用于串行通信服务。
设定值为百分数。
串行通信服务的最小值为0.34ms.1.1-3 中断/刷新(Interrupt/Refresh)中断使能:输入端IR00003,00004,00005,00006 作为普通端(不作为外部中断输入端);作为外部中断输入端;作为快速响应输入端。
输入时间常数:IR00000-00002,00003-00004,00005-00006,00007-000011001,002,003,004,005,006,007,008.设定值:1—80ms这个设定相当于输入滤波时间,较长的设定有利于降低输入器件的抖动效应和噪音。
1.1-4 错误信号的设定扫描时间检测:设定检测则当扫描时间超过100ms ,产生一个非致命错误。
错误信息记录的方式:存储7个最新错误信息记录,只存储头7个错误信息记录,不存储。
1.1-5外设口设置(Peripheral Port )通信设置:标准的:9600 baud率;1 bit 起始位,7 bit 数据位,2 bit 停止位,偶校验。
用户设定可更改上述设置。
“模式”项目是指通信协议,有上位机链接Host Link 协议;1 对1 PLC链接主站;1 对1 PLC链接从站;与可编程终端的通信NT链接。
1.1-6 高速计数器设定:计数器复位设定;Z 项输入加软件复位;软件复位。
工作模式:增/减模式,增加模式。
不使用高速计数器功能,使用高速计数器功能。
1.2DM 设置上述软件设置的底层操作是对DM6600—DM6655 的特殊赋值。
如下表所示:启动模式(DM6600—DM6614)下述设定只有在下载到PLC并重新启动方能生效。
字位功能DM6600 00 –07 启动模式(08—15 设为02 时)00:编程模式01监控制02运行08—15 00 连编程器件时由它决定;不连编程器件时运行模式。
01 继续使用上次关电源之前使用的工作模式。
02 由00—07的设定决定。
DM6601 00---07 不用08---11 IOM 保持位(SR25212)状态和启动。
0:复为0;1 保持以前的状态。
12---15 强制状态保持位(SR25211)保持和启动。
0:复位为0;1 保持以前的状态。
DM6602 00---03 程序存储器写保护。
0 不保护;1 保护(除DM6602 自身外)04----07 编程器显示语言。
0;英语;1:日语。
字位功能DM6602 08---11 不用12---15 不用DM6603 00---15 不用DM6604 00—07 00 当数据不能被电容维持不产生存储器错误信号;01当数据不能被电容维持产生存储器错误信号。
08—15 不用DM6605—DM6614 00—15 不用扫描时间设定(DM6616---DM6619)下面的设定在下载到PLC 后下次启动工作有效。
DM6615 00---15 不用DM6616 00---07 不用08----15 不用DM6617 00---07 外设口的服务时间(当08—15 设为01)00---99(BCD) : 扫描周期时间中服务于外设口的百分比08---15 外设口的服务时间设定使能。
00固定为5%扫描; 01 :由00-07 决定DM6618 00---07 扫描周期监视时间(当08—15 设定为01,02,03 )00---99 (BCD):设定(视08---15位,见下)如果扫描周期超过在此设定的时间PLC的工作将被停止并产生一致命错误。
08---15 扫描周期监视时间使能(在00—07*单位;99 s最大)00:120ms 固定01;设定单位10ms ;02:设定单位100ms;03:设定单位1sDM6619 00---15 最小扫描周期时间。
0000:可变(无最小)0001—9999(BCD):以ms为单位的最小时间中断处理(DM6620---DM6639)下面的设定在下载到PLC 后下次启动工作有效。
DM6620 00---03 IR000---00002 输入端的输入时间常数。
0:10ms;1:1ms;2;2ms;3:3ms;4:5ms;5:10ms;6:20ms;7:40ms;8:80ms 04---07 IR00003---00004的输入时间常数(如同00—03的设定)08—11 IR00005---00006的输入时间常数(如同00—03的设定)12---15 IR00007---00011的输入时间常数(如同00—03的设定)DM6621 00---07 IR001的输入时间常数00:10ms; 01:1ms; 02:2ms ; 03:3ms ; 04: 5ms; 05: 10ms ; 06: 20ms07:40ms; 08;80ms08—15 IR002的输入时间常数(如同IR001 的设定)DM6622 00-07 IR003的输入时间常数(如同IR001 的设定)08—15 IR004的输入时间常数(如同IR001 的设定)DM6623 00---07 IR005的输入时间常数(如同IR001 的设定)08---15 IR006的输入时间常数(如同IR001 的设定)字位功能DM6624 00---07 IR007的输入时间常数(如同IR001 的设定)08---15 IR008的输入时间常数(如同IR001 的设定)DM6625 00---07 IR009的输入时间常数(如同IR001 的设定)08—15 不用DM6626- 00—15 不用DM6627DM6628 00—03 IR00003 中断使能(0: 常规输入;1:中断输入;2:快速响应)04---07 IR00004中断使能(0: 常规输入;1:中断输入;2:快速响应)08---11 IR00005中断使能(0: 常规输入;1:中断输入;2:快速响应)(CPM2C 10点CPU 设为0)12---15 IR00006中断使能(0: 常规输入;1:中断输入;2:快速响应)(这个输入点在CPM2C 10点CPU 不存在)DM6629 00---03 不用04---07 不用08—15 不用DM6630-DM3341 00---15 不用高速计数器设定(DM6640—DM6644)下面的设定在下载到PLC 后下次启动工作有效。
DM6640—DM6641 00—15 不用DM6642 00—03 高速计数器模式0: 差分相位输入模(5KHZ);1:脉冲加方向输入模(20KHZ)2; 增/减输入模(20KHZ); 4: 增加输入模(20KHZ)04—07 高速计数器复位方式0:Z相输入加软件复位;1:软件复位。