现代设计方法思考题和练习题
现代设计方法习题答案
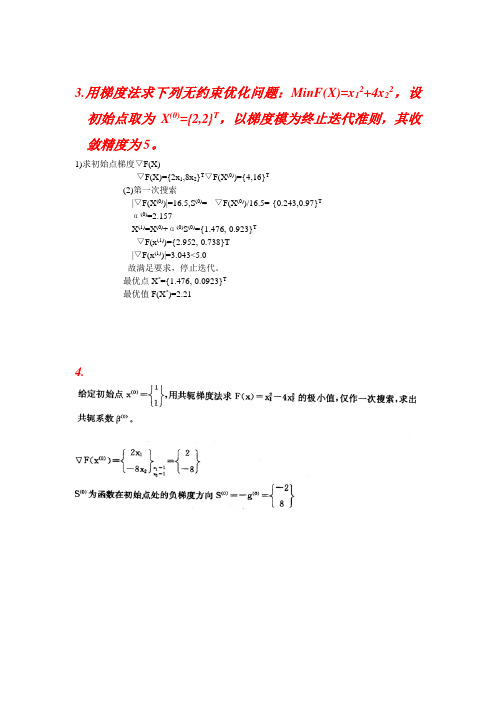
3.用梯度法求下列无约束优化问题:MinF(X)=x12+4x22,设初始点取为X(0)={2,2}T,以梯度模为终止迭代准则,其收敛精度为5。
1)求初始点梯度▽F(X)▽F(X)={2x1,8x2}T▽F(X(0))={4,16}T(2)第一次搜索|▽F(X(0))|=16.5,S(0)=- ▽F(X(0))/16.5=-{0.243,0.97}Tα(0)=2.157X(1)=X(0)+α(0)S(0)={1.476,-0.923}T▽F(x(1))={2.952,-0.738}T|▽F(x(1))|=3.043<5.0故满足要求,停止迭代。
最优点X*={1.476,-0.0923}T最优值F(X*)=2.214.5.6.用外点法求解约束优化问题:()()12211221min ..0()0f X x x s tg X x x g X x =+=-≤=-≤ , 收敛准则:(1)()0.10.01k k XX εδ+-≤=,约束容限= 解:(1)利用外点法惩罚法构造无约束优化问题()()12()22()212121(min ,()()k k k x x X rx x r x x r x +⎧⎪Φ=⎨++-+-⎪⎩可行域内)(可行域外)(2)此例只是为了说明外点法的思路,用微分法求解上述无约束优化问题。
用极值条件求解:在可行域内:偏导数不可能等于0,即可行域内无极值在可行域外,令:()2()11211()212214()2012()0k k k r x x x r x x r x x x ∂Φ=+-+=∂∂Φ=--=∂从上面两式解得 12()()2()111,2(1)4(1)2k k k x x r r r =-=-++ 可见,对于不同的惩罚因子值,可以得到不同的极小点。
【令()k r→∞,即可得到原问题的最优解**(0,0),()0T X f X ==】(3)取(0)(1)()()1,10k k k r r Cr r +===进行迭代计算,迭代结果如下:(1)(1)(1)(2)(2)(2)(2)(1)(3)(3)(3)(3)(2)1(0.25,0.4375),()0.687510,(0.0455,0.0479),()0.0934,0.44100(0.00495,0.00498),()0.00993,0.059T T r X f X r X f X X X r X f X X X εε==--=-==--=--=>==--=--=<当时,当时当时, 点(3)X满足点距收敛准则,同时,它在约束容限范围内,因此,终止迭代!输出结果7.已知一轴的危险断面上,同时作用有弯矩M 和转矩T ,如图所示。
现代设计方法考试题
现代设计方法考试题一、选择题(每题2分,共10分)1. 现代设计方法的核心理念是什么?A. 功能主义B. 人因工程C. 可持续性D. 创新性2. 以下哪个不是用户体验设计的关键要素?A. 可用性B. 可访问性C. 复杂性D. 情感连接3. 在进行设计思维的原型制作时,通常推荐使用哪种材料?A. 纸张和胶带B. 金属和玻璃C. 塑料和木材D. 电子设备4. 以下哪个不是有效的设计研究方法?A. 用户访谈B. 竞品分析C. 随机抽样D. 情境分析5. 色彩在设计中的作用不包括以下哪项?A. 引导视觉流动B. 传达品牌信息C. 增强物理强度D. 影响情绪感知二、简答题(每题10分,共30分)1. 请简述现代设计方法中的“以用户为中心”的设计原则,并给出一个实际应用的例子。
2. 描述设计思维的五个阶段,并解释每个阶段在设计过程中的重要性。
3. 讨论在设计过程中如何平衡美学和功能性,并举例说明。
三、论述题(每题20分,共40分)1. 论述现代设计方法在可持续发展中的作用,包括至少两个实际案例分析。
2. 分析数字化时代下,现代设计方法如何适应快速变化的技术和用户需求,探讨至少三种设计策略。
四、案例分析题(共20分)选择一个你熟悉的产品设计案例,分析该产品如何运用现代设计方法进行设计和改进。
请包括以下内容:- 产品背景和设计目标- 应用的设计方法和过程- 用户体验和市场反馈- 你的个人评价和建议请确保你的答案整洁、条理清晰,并且论点充分支持你的分析。
现代设计方法参考答案.docx

现代设计方法参考答案1.凸规划对于约束优化问题对于约束优化问题min f (X)"®(X)<0 (j = l,2,3,…,®若"X)、g,(X) 0 = 1,2,3,・..,杓都为凸函数,则称此问题为凸规划。
O2.可行搜索方向是指当设计点沿该方向作微量移动时,目标函数值下降,且不会越出可行域。
3.设计空间:n个设计变量为坐标所组成的实空间,它是所有设计方案的组合5.收敛性是指某种迭代程序产生的序列{X气R = 0,1,・・・)}收敛于lim %= X*6.非劣解:是指若有m个目标办(X)(i = l,2…“),当要求m-1个目标函数值不变坏时,找不到一个X,使得另一个目标函数值/(X)比厶(XJ,则将此X孩为非劣解。
7.黄金分割法:是指将一线段分成两段的方法,使整段长与较长段的长度比值等于较长段与较短段长度的比值。
8•可行域:满足所有约束条件的设计点,它在设计空间中的活动范围称作可行域一、与文件系统相比,数据库系统的主要特征有哪些?关于数据库系统对比文件系统的优点冇:1、提高了数据的共享性,使多个用户能够同时访问数据库中的数据。
2、提高了数据的一致性和完整性。
3、提供数据与应用程序的独立性。
二、常用的可靠度分配方法有哪三种?各自的分配原则是什么?答:常用的可靠度三种分配方法和各自的分配原则如下:(1)等同分配法:按照系统中各单元(了系统或零部件)的可靠度均相等的原则分配。
(2)加权分配法:把各子系统在整个系统屮的重要度以及各子系统的复杂度作为权重来分配可靠度。
(3)最优分配法:全血考虑各种殷素的影响,采用优化方法分配可靠度。
三、在有限元分析时,什么情况下适合选择一维、二维、三维单元?(1)当几何形状、材料性质及其它参数能用一个坐标描述时,选用一维单元。
(2)当儿何形状、材料性质及其它参数需要用两个相互独立的处标描述时,选用二维单元。
(3)当几何形状、材料性质及其它参数需要用三个相互独立的坐标描述吋,选用三维单元。
现代设计方法试卷及答案
《现代设计方法》(课程代码:02200)一、单项选择题(本大题共20小题,每小题1分,共20分)1.数字化仪在早期CAD作业中经常使用,它是一种()A.输入设备B.输出设备C.存储设备D.绘图设备2.滚筒式绘图仪一般采用插补原理进行绘图,但在绘图过程中有时不需要插补。
绘制以下方向的线段时需要插补的是()A.X方向线段B.Y方向线段C.±45o方向线段D.一般方向线段3.在采用Cohen—Sutherland编码裁剪算法剪裁线段时,如果一条线段跨越两个区,则当其两端点编码的逻辑乘为零时,则该线段( )A.全部可见B.全部不可见C.部分可见D.不确定4.在消隐处理中,当进行平面可见性测试时,若平面的法线矢量和视线矢量的夹角大于90o,则该面()A.可见B.不可见C.部分可见D.不确定5.一逐行扫描光栅显示器的水平扫描频率为15600H Z,垂直扫描频率为50H Z,则该显示器()A.水平方向有15600个像素点B.垂直方向有312条水平扫描线C.一条水平扫描线上有312个像素点D.垂直方向上有50条扫描线6.F(x)为单值、连续、可微且无约束的一元函数,则在点x=x*处有极大值的充分条件是()A.B.第1页(共9页)第2页(共9页)C .0)(=''*X FD .0)(0)(<''='**X F X F7.外点罚函数法的特点是( ) A .适合处理等式约束的最优化问题B .探索过程在可行域内进行C .适合处理不等式约束的最优化问题D .需要先求出初始内点 8.在单峰搜索区间[a ,b]内任取两点a 1、a 2,若函数值F(a 1)=F(a 2),则缩小后的区间为( ) A .[a ,a 1]B .[a 1,b]C .[a 1,a 2]D .[a ,a 2]9.以下关于函数的梯度的说法不正确的是( ) A .函数的梯度是标量 B .函数值沿梯度方向变化最剧烈 C .函数的梯度是矢量D .求函数的极小值时常沿负梯度方向搜索10.多元函数F(x)在点X *附近一阶偏导数连续,则该点为极大值点的充分条件为( ) A .F (x *)=0 B . F (x *)=0,H (x *)正定 C .F (x *)=0D . F (x *)=0,H (x *)负定11.平面桁架结构中,某单元局部编码依次对应的总体编码为8,6,则单元则度矩阵中的元素k 34应放入总体刚度矩阵[K]中的( ) A .16行15列 B .11行12列C .12行16列D .11行15列12.平面三解形单元的刚度矩阵阶数为( ) A .2×2B .3×3C .4×4D .6×613.平面刚架结构中的杆单元,单元中的位移分量个数为( ) A .3B .6C .9D .1214.平面问题的弹性矩阵与材料的( ) A .弹性模量和硬度有关 B .弹性模量和泊松比有关 C .弹性模量和强度有关D .强度和泊松比有关15.若把平面应力问题的弹性矩阵改成平面应变问题的弹性矩阵,只需将( )E /(12μ-)μ-第3页(共9页)A .E 换成E /(1μ-),μ换成μ/(1μ-)B .E 换成E /(12μ-),μ换成μ(12μ-) C .E 换成E /(12μ-),换成μ/(1μ-)D .E 换成E /(1μ-),μ换成μ(12μ-)16.2/3表决系统中各子系统的寿命均服从指数分布,且失效率均为λ,则该表决系统的平均寿命为( ) A .λ65B .λ32 C .λ23 D .λ56 17.图示由7个子系统组成的复杂系统,各子系统的可靠度均为R ,则该系统的可靠度为( )A .432R R R -+B .42)23)(1(R R R R --+ C .3223R R -D .)23)(1(2R R R --+18.为了检查灯炮的质量,抽取100只灯泡进行试验,灯泡工作到 100小时有30只损坏,工作到150小时又有20只损坏,从100小时 到150小时这段时间灯泡的平均失效密度为( ) A .0.004B .0.006C .0.2D .0.519.电器元件(系统)的失效密度函数一般服从( ) A .正态分布B .指数分布C .威布尔分布D .对数正态分布20.当强度和应力的均值相等时,零件的可靠度( ) A .大于50%B 。
现代设计方法练习题

1.函数,从初始点出发,沿着负梯度方向进行一维搜索,其最优步长因子为a. 7/14b. 9/14c. 3/14d. 5/142.某电器系统由N个子系统串联而成,各子系统的可靠度服从指数分布,第i个子系统的失效率为λi,则该电器系统的平均寿命为a.b.c.d.3.判断矩阵,它应是( )a. 负定矩阵b. 正定矩阵c. 不定矩阵d. 对称矩阵4.2/3 表决系统中各子系统的寿命均服从指数分布,且失效率均为λ ,该表决系统的平均寿命为()a.b.c.d.5.图示由7 个子系统组成的复杂系统,各子系统的可靠度均为R,则该系统的可靠度为()a.b.c.d.6.函数,从初始点出发,沿着负梯度方向进行一维搜索,其最优步长因子为a. 9/14b. 7/14c. 5/14d. 3/147.在图示极小化的约束优化问题中,最优点为a. Ab. Bc. Cd. D8.机电产品的平均失效率,它表征了该产品工作到t时刻后a. 单位时刻内发生失效的概率b. 单位时刻内发生失效的产品数c. 累积失效数与受试产品总数之比d. 累积失效数与仍正常工作的产品数之比9.对于二次函数,若X*为其驻点,则为a. 零b. 无穷大c. 正值d. 负值10在单峰搜索区间[x1,x3](x1<x3)内,取一点x2,用二次插值法计算得x4(在[x1,x3]内),若x2>x4,并且其函数值F(x4)<F(x2),则取新区间为a. [x1,x4]b. [x2,x3]c. [x1,x2]d. [x4,x3]11函数在区间[-10,20]是单峰函数,用0.618法求函数的极值,初始搜索区间为[-5,20],第一次迭代的两个计算点a1,b1、分别为a. a1 =1.46,b1=8.54b. a1 =4.55,b1=10.45c. a1 =-1.46,b1=8.54d. a1 =-4.55,b1=10.45a. 通过所有给定点b. 不通过所有给定点c. 通过部分给定点d. 可能通过部分给定点13并联系统的可靠度比组成该系统的零件的可靠度a. 底b. 高c. 相等d. 不确定14产品工作到t时刻后的单位时间内发生失效的概率称为a. 平均寿命b. 平均失效密度c. 平均可靠度d. 平均失效率15CAD一词已经成为世界通用的名词,它是指a. 计算机辅助工程b. 计算机辅助制造c. 计算机辅助设计d. 计算机辅助工艺规程设计16黄金分割法中,每次缩短后的新区间长度与原区间长度的比值始终是一个常数,此常数是a. 0.382b. 0.186c. 0.618d. 0.81617若产品的平均寿命等于失效率的倒数则产品的寿命服从a. 正态分布b. 泊松分布c. 指数分布d. 二项分布18多元函数F(X)在点X*附近偏导数连续, F(X*)=0且H(X*)正定,则该点为F(X)的a. 极小值点b. 极大值点c. 鞍点d. 不连续点190.618法在迭代运算的过程中,区间的缩短率是a. 不变的b. 任意变化的c. 逐渐变大d. 逐渐变小20在单峰搜索区间[a,b]内任取两点a1、a2,若函数值F(a1)=F(a2),则缩小后的区间为()a. [a,a1]b. [a1,b]c. [a1,a2]d. [a,a2]21.r/n表决系统蜕变为工作冗余系统的条件是a. r>1b. r<>c. r=1d. r=n22.标准正态分布是定义为a. μ=1,σ=0.5的正态分布b. μ=1,σ=1的正态分布c. μ=0,σ=1的正态分布d. μ=0.5,σ=1的正态分布23.平面桁架结构中的杆单元,单元刚度矩阵的阶数为a. 2×2b. 3×3c. 4×4d. 6×624.单元刚度矩阵不具备的特性是【】a. 奇异性b. 对称性c. 分块性d. 稀疏性25.由100只灯泡组成的照明系统,每只灯泡的故障率为2%,用二项分布确定当有1只灯泡发生故障的概率为a. 0.295b. 0.270c. 0.182d. 0.0926.在平均安全系数不变的情况下,由于强度(或应力)的分散度增大会使零件的可靠度a. 降低b. 提高c. 不变d. 无法确定27.以下哪一种软件具有大型通用有限元分析功能( )a. Autocadb. Ansysc. Unigraphicsd. Pro/Engineering28.某产品的寿命服从指数分布,若知其失效率λ=0.002,则该产品的平均寿命为a. 200b. 1000c. 500d. 200029.优化设汁的数学模型的基本组成要素是a. 设计变量,目标函数,约束条件b. 设计空间,目标函数,约束条件c. 设计变量,目标函数d. 设计变量,约束条件30.当系统中任何—个零件发生故障都会导致整个系统失效,该系统是a. 串联系统b. 冗余系统c. 表决系统d. 非工作冗余系统31.平面桁架结构中的杆单元,每个单元中的位移分量个数为a. 2b. 3c. 4d. 632.进行有限元分析时,刚度矩阵中的某元素为Kij。
《现代设计方法》练习题及参考答案

《现代设计方法》练习题及参考答案西南科技大学成教学院德阳教学点《现代设计方法》练习题及参考答案班级:姓名:学号:成绩:一、单项选择题(本大题共20小题。
每小题2分。
共40分)1.CAD一词已经成为世界通用的名词,它是指()A.计算机辅助工程 B.计算机辅助制造C计算机辅助设计 D.计算机辅助工艺规程设计2.实验测试了自变量为3,4,5,6,7,8时的函数值,现要用抛物线插值法计算5.3处的函数值,选择下列哪组自变量及其对应的函数值进行插值计算较为合理()A.3,4,5 B.4,5,6 C.5,6,7 D.6,7,83.设备坐标系的维数一般为()A.一维 B.二维 C三维 D.四维4.将平面图形沿X方向平移10个单位,沿Y方向平移15个单位,其坐标变换矩阵为()A. B. C.D.5.在消阴处理中,进行极大/极小检验,如果两个物体的投影不满足极大/极小条件,则两个物体之间()A.相互完全遮挡 B.部分相互遮挡 C.相互不遮挡 D.遮挡关系不确定6.若函数F(x)在Dl上具有连续二阶导数(D是Dl内部的凸集),则F(x)为D 上的凸函数的充分必要条件是F(x)的Hessian矩阵()A.半正定 B.正定 C.半负定 D.负定7.对约束优化问题,设计变量的选择()A.可以在可行域中 B.不允许在可行域中C.只允许在可行域中 D.不一定在可行域中8.要将一个有约束问题的求解转化为一系列无约束问题的求解,可以选择()A.复合形法 B.简约梯度法 C.罚函数法 D.共轭梯度法9.在解决线性规划问题时,首选的优化方法为()A.外点罚函数法 B.单纯形法 C.拟牛顿法 D.变尺度法10.当目标函势沩凸函数,约『束函彭嘣黜函数时,K—T条件是约束优化问题取得极值的()A.必要条件 B.充分条件 C.一般条件 D.充分必要条件11.有限元分析中,下列单元属于二维单元的是()A.六面体单元 B.四面体单元 C.杆单元 D.三角形单元12.用有限元方法求解问题获得的解属于()A.近似解 B.精确解 C.解析解 D.半解析解13.采用杆单元进行平面刚架有限元分析,杆单元的一端具有()A.两个自由度 B.三个自由度 C.四个自由度 D.六个自由度14.某刚架单元两节点对应的总体编码为5和3,则局部座标系下的单元刚度系数k在总体刚度矩阵中的位置为()A.第5行第3列B.第14行第3列C.第5行第14列D.第14行第14列1 5.在平面应变问题中,沿轴线方向()A.应变、应力都为零 B.应力为零,但应变不为零C.应变为零,但应力不为零 D.应变、应力都不为零16.若产品的平均寿命等于失效率的倒数则产品的寿命服从()A.正态分布 B.泊松分布 C.指数分布 D.二项分布17.在平均安全系数不变的情况下,由于强度(或应力)的分散度增大会使零件的可靠度()A.降低 B.提高 C.不变 D.无法确定18.当系统中任何—个零件发生故障都会导致整个系统失效,该系统是()A.串联系统B.冗余系统C.表决系统D.非工作冗余系统19.并联系统的可靠度比组成该系统的零件的可靠度()A.底 B.高 C.相等 D.不确定20.产品工作到t时刻后的单位时间内发生失效的概率称为()A.平均寿命 B.平均失效密度 C.平均可靠度 D.平均失效率二、多项选择题(本大题共5小题。
现代设计方法试题题库
现代设计方法试题题库1.无约束优化方法有()法。
A.梯度B.0.618C.牛顿法D.坐标轮换法E.鲍威尔法答案:A|C|D|E2.单元刚度矩阵元素的值与单元()有关。
A.形状B.节点数C.节点自由度D.物理性质E.化学性质答案:A|B|C|D3.提高有限元计算精度的方法有()。
A.提高单元阶次B.增加单元数量C.规则单元形状D.接近实际的边界条件E.减小计算规模答案:A|B|C|D|E4.元件之间连接的基本方式有()等。
A.串联B.并联C.待机D.表决E.混合答案:A|B|C|D5.余度技术可以采用()。
A.并联方式B.表决方式C.备用方式D.交叉方式E.直接方式答案:A|B|C6.能处理含等式约束条件的有约束设计优化方法有( )。
A.Powell法B.变尺度法C.内点罚函数法D.外点罚函数法E.混合罚函数法答案:D|E7.下面给出的数学模型中,属于线性规划的有( )。
A.B.C.D.E.答案:A|B|E8.下面关于梯度法的一些说法,正确的是( )。
A.只需求一阶偏导数B.在接近极小点位置时收敛速度很快C.在接近极小点位置时收敛速度很慢D.梯度法开始时的步长很小,接近极小点时的步长很大E.当目标函数的等值线为同心圆时,任一点处的负梯度都是全域的最速下降方向答案:A|C|E9.下述矩阵中,正定矩阵为( )。
A.B.C.D.E.答案:A|B|E10.当零件强度和应力均为正态分布时,提高零件可靠度的措施有( )。
A.提高强度的标准差B.降低强度的标准差C.提高应力的标准差D.降低应力的标准差E.增加强度的均值答案:B|D|E11.在描述机电设备中因局部失效而导致整体失效时,一般用()。
A.正态分布B.指数分布C.威布尔分布D.泊松分布答案:C12.对于二次函数,若为其驻点,则为()。
A.无穷大B.零C.正值D.负值答案:B13.已知,则在点处的梯度为()。
A.B.C.D.答案:C14.Powell改进算法是一种()。
现代设计方法思考题
《现代设计方法》思考题
1.说明现代产品设计在产品开发中的地位;
2.说明现代机电产品的文化特点,并举例;
3.现代产品设计中的数字化与并行化特征;
4.说明精益生产系统的特点和关键技术;
5.分析现代设计技术与制造技术的关联性;
6.说明产品系统化设计方法中的“技术过程”与“技术系统”
的内涵和关联性;
7.阐述产品设计中的“功能分析法”,并结合实例表述其应用过
程;
8.简述创造技法中的5w2h法(提问法中的)和相似原理(针
对类比法)的具体思路、方法,并举例;
9.简述基于生命科学的产品创新原理,并说明1~2中具体方法;
10.说明新产品的“攻势战略”和“守势战略”的内涵与方法;
11.说明新产品开发中的“阶段~门”方法及其应用;
12.说明机械产品可靠性设计的特征、意义,以及可靠性指标;
13.说明可靠设计中“系统可靠性”分配的作用与方法;
14.说明面向新产品开发的企业技术开发能力及其评定问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现代设计方法思考题和练习题一、有限元部分思考题1 有限单元法中离散的含义是什么?有限单元法是如何将具有无限自由度的连续介质问题转变成有限自由度问题?2 位移有限单元法的标准化程式是怎样的?3 什么叫做节点力和节点载荷?两者有什么不同?为什么应该保留节点力的概念?4 单元刚度矩阵和整体刚度矩阵各有哪些性质?单元刚度系数和整体刚度系数的物理意义是什么?两者有何区别?5 减少问题自由度的措施有哪些?各自的基本概念如何?6 构造单元函数应遵循哪些原则?7 在对三角形单元节点排序时,通常需按逆时针方向进行,为什么?8采用有限元分析弹性体应力与变形问题有哪些特点和主要问题?9 启动ANSYS一般需几个步骤?每一步完成哪些工作?10 进入ANSYS后,图形用户界面分几个功能区域?每个区域作用是什么?11 ANSYS提供多种坐标系供用户选择,主要介绍的6种坐标系的主要作用各是什么?12工作平面是真实存在的平面吗?怎么样理解工作平面的概念和作用?它和坐标系的关系是怎样的?13 如何区分有限元模型和实体模型?14网格划分的一般步骤是什么?15单元属性的定义都有什么内容?如何实现?如何实现单元属性的分配操作?16自由网格划分、映射网格划分和扫掠网格划分一般适用于什么情况的网络划分?使用过程中各需要注意什么问题?17如何实现网格的局部细化?相关高级参数如何控制?18负载是如何定义和分类?19在有限元模型上加载时,节点自由度的约束有几种?如何实现节点载荷的施加?20与有限元模型加载相比,实体模型加载有何优缺点?如何实现在点、线和面上载荷的施加?21 ANSYS提供的两种后处理器分别适合查看模型的什么计算结果?22使用POST1后处理器,如何实现变形图、等值线图的绘制?习题试用ANSYS应用程序计算下列各题:1. 如习题图2-1,框架结构由长为1米的两根梁组成,各部分受力如图表明,μ,求各节点的力及力矩,节点位移。
⨯=,0.32E11.2pa1001=习题图2-1 框架结构2. 自行车扳手由钢制成,尺寸如习题图2-2,pa 1001.2E 11⨯=,0.32=μ,扳手的厚度为3mm,受力分布如图示,左边六边形固定,求受力后的应力、应变、及变形。
习题图2-2 自行车扳手3. 习题图2-3所示:一块大板承受双向拉力的作用,在其中心位置有一小孔,相关结构尺寸如图示,试计算小孔的集中应力及变形。
pa 1001.2E 11⨯= 3.0=μ ,1000pa q 1=2000p a q 2=,1mm t =习题图2-3 平板4. 习题图2-4所示,汽车连杆,其厚度为0.5in ,各几何尺寸如图所示。
在小头孔的内侧90度范围内承受着P=1000psi 的面载荷,试分析连杆的受力状态。
61030E ⨯=psi,3.0=μ。
(题中单位均为英制。
提示:选20节点95单元)习题图2-4 汽车连杆5. 习题图2-5所示,为轮子的平面图,图中的单位均为英寸。
已知:61030E ⨯=psi ,3.0=μ,密度为0.00073142in /s bf -,s /525rad =ω试分析当轮子绕垂直方向轴旋转时所受的力及变形习题图2-5 轮子平面图6. 习题图2-6所示,两个弹簧的刚度系数均为200,集中质量m=0.5kg,m 受简谐力作用,最大幅值F=200N ,频率为0~7.5Hz 。
试分析集中质量m 的位移随频率的变化规律。
习题图2-6 弹簧系统7. 习题图2-7所示,工作台与其4个支撑组成的板—梁结构系统,工作台上表面施加随时间变化的均布压力且方向垂直于工作台表面.已知:系统中所有材料为pa 1001.2E 11⨯=,3.0=μ,23m /kg 108.7⨯=ρ,工作台厚度为0.02m ,4个支撑每一个的截面面积为24m 102-⨯,惯性矩48m 102-⨯,宽度0.01m,高度0.02m 。
试求系统瞬态响应。
a) b)习题图2-7 板—梁结构系统a)工作台 b) 载荷曲线二、优化设计部分思考题:1.论述优化设计的主要目的,并比较传统设计与优化设计。
2.写出优化设计数学模型的一般形式。
3.叙述一维搜索的概念、步骤和主要的一维搜索方法。
4.叙述无约束优化设计的主要方法。
5.叙述约束优化设计的主要方法。
习题1、设计一容积为V 的平底、无盖圆柱形容器,要求消耗原材料最少,试建立其优化设计的数学模型,并指出属于哪一类优化问题。
2、设计一大型卡尺的截面尺寸(如习题图3-1),要求自重挠度不超过0.05mm ,使其重量最习题图3-1 卡尺设计3、设计一个二级展开式渐开线标准直齿圆柱齿轮减速器,已知总传动比αi =20,高速级齿轮模数2,1m =2.5mm ,低速级齿轮模数4,3m =3mm ,要求减速器高速轴与低速轴间中心距a 最小,试建立其优化设计的数学模型,并指出属于哪一类优化问题。
4、 试画出下列约束条件下x=[]Tx x 21的可行域:(1) )(1x g =21x +22)1(-x 1-0≤)(2x g =21)1(-x +22x 1-0≤)(3x g =1x +2x 1-0≤(2) )(1x g =21x +61-0≤ )(2x g =1x -0≤ )(3x g 2x -0≤)(4x g =21x +22x 16-0≤5、 试将优化问题使 ()x f =21x +22x 24x -+4 最小受约束于)(1x g =21x 1x -+10≤)(2x g =1x 3-0≤ )(3x g =2x -0≤的目标函数等值线和约束边界曲线勾画出来,并回答下列问题:(1)()1x = []T11是否可行点;(2)()2x= ⎥⎦⎤⎢⎣⎡2125是否可行点;(3)可行域是否凸集,用阴影线描绘出可行域的范围。
6、试求函数()x f =1002212)(x x -+21)1(x -的无约束极值点和在()0x =[]T11-点的负梯度方向,并画出函数的等值线和点()0x处的负梯度方向。
7、用0.618法求一元函数()x f =2x x 10-+36的极小点,初始搜索区间[]b a ,=[]10,10-,试给出经两次迭代后的新区间。
8、用梯度法对函数()x f =21x +222x 作三次迭代,初始点()0x=[]T44,并验证相邻两次迭代的搜索方向是互相垂直的。
9、用梯度法求()x f =221x +222x +223x 的最优解,初始点()0x=[]T111,迭代精度05.0=ε。
10、已知汽车行驶速度x(单位为km/min)与每公里耗油量间的函数关系为()x f =x+x20。
试用0.618法求速度x 在0.2~1km/min 范围内的最经济速度*x 。
给定1.0=ε。
11、已知目标函数()x f =2123x +2221x 21x x -12x -,求点x= []T 22沿方向()k s =[]T 24的最优步长因子*α。
12、已知不等式约束优化问题使 ()x f =1x +2x 最小 受约束于)(1x g =21x 22x -0≤)(2x g =1x -0≤试写出内点惩罚函数和外点惩罚函数,并分别给出内点法和外点法的初始迭代点。
三、可靠性部分习 题4-1 何为机械产品的的可靠性?研究可靠性有何意义? 4-2 何为可靠度?如何计算可靠度?4-3 何为失效率?如何计算?失效率与可靠度有何关系?4-4 可靠性分布有哪几种常用分布函数?试写出它们的表达式。
4-5 试述浴盆曲线的失效规律和失效机理?如果产品的可靠性提高,那么,浴盆曲线将有何变化?4-6 可靠性设计与常规静强度设计有何不同?可靠性设计的出发点是什么? 4-7 为什么按静强度设计法分析为安全零件,而按可靠性分析后会出现不安的情况?试举例说明。
4-8 已知零件受应力g(s)作用,零件强度为)(r f ,如何计算该零件的强度安全可靠度。
4-9已知某产品的寿命服从指数分布tet R λ-=)(,求9.0=r 的寿命4-10 零件的应力和强度均服从正态分布时,试用强度差推导该零件的可靠度表达式。
4-11有1000个零件,已知其失效为正态分布,均值为500h,标准差为40h.。
求:t =400h 时,其可靠度、失效概率为多少?经过多少小时后,会有20%的零件失效? 4-12强度和应力均为任意分布时,如何通过编程计算可靠度? 试编写程序。
4-13机械系统的可靠性与哪些因素有关? 机械系统可靠性预测的目的是什么? 4-14机械系统的逻辑图与结构图有什么区别? 零件间的逻辑关系有几种?4-15 一个系统有五个元件组成,其联结方式和元件可靠度如题下图所示,求该系统的可靠度?习题图4-154-16某机械零件承受的应力为服从正态分布的随机变量,其均值为196MPa ,标准差为29.4MPa ,该零件的强度也服从正态分布,其均值为392MPa ,标准偏差为39.2MPa ,求该零件的可靠度。
4-17已知一受拉圆杆承受的载荷为P N P μ(~,)p σ,其中P μ=60 000N,p σ=2 000N ,拉杆的材料为某低合金钢,抗拉强度为δμδ(N -,)δσ,其中δμ=1 076 MPa ,δσ=42.2MPa,要求其可靠度达到999.0=R ,试设计此圆杆的半径。
4-18有一方形截面的拉杆,它承受集中载荷P 的均值为150kN ,标准偏差为1kN 。
拉杆材料的拉伸强度的均值为800MPa ,标准偏差为20MPa ,试求保证可靠度为0.999时杆件 截面的最小边长(设公差为名义尺寸的0.015倍)。
4-19设由两个子系统组成的并联系统,已知子系统可靠度R R R ==21,且失效率λλλ==21,服从指数分布。
求该系统的可靠度。
4-20 由3个子系统组成的系统,设每个子系统分配的可靠度相等,系统的可靠度指标为84.0=R ,求每个子系统的可靠度。
4-21 什么是故障树分析法? 其特点是什么?4-22建立故障树的过程如何?建树时应注意什么问题?4-23试画出题下图所示结构的故障树,并求它的全部割集和最小割集,试用结构函数法求系统的可靠度。
习题图4-23。