利盟W840N机器使用手册
Lexmark利盟MS421说明书B2338打印机B2442使用手册M1242用户指南MS321

B2338、B2442、M1242、MS321、MS421 打印机用户指南2018 年 9 月机器类型:4600型号:230、238、430、438、490目录安全信息 (5)约定 (5)产品声明 (5)了解打印机 (8)查找有关打印机的信息 (8)为打印机选择位置 (9)打印机配置 (10)连接电缆 (11)使用控制面板 (12)理解电源按钮和指示灯的状态 (13)加载纸张和特殊介质 (14)设置特殊介质的尺寸和类型 (14)配置 Universal 纸张设置 (14)加载进纸匣 (14)加载多功能进纸器 (16)连接进纸匣 (17)纸张支持 (18)支持的纸张尺寸 (18)支持的纸张类型 (19)支持的纸张重量 (20)打印 (21)从计算机打印 (21)从移动设备打印 (21)打印字体样本列表 (22)理解打印机菜单 (23)菜单一览表 (23)设备 (23)打印 (30)纸张 (37)网络/端口 (39)报告 (49)疑难解答 (50)打印菜单设置页 (50)保护打印机 (51)定位安全槽 (51)清除打印机内存 (51)还原出厂默认设置 (51)易失性声明 (52)维护打印机 (53)网络连接 (53)清洁打印机 (54)订购部件和耗材 (55)更换部件和耗材 (57)移动打印机 (67)节省能源和纸张 (68)循环再生 (69)清除卡纸 (71)避免卡纸 (71)识别卡纸位置 (72)纸张卡在盖门 A 内 (73)纸张卡在后部盖门内 (76)纸张卡在标准接纸架中 (77)纸张卡在双面打印部件中 (78)纸张卡在进纸匣中 (79)纸张卡在多功能进纸器中 (79)疑难解答 (81)网络连接问题 (81)耗材问题 (82)进纸问题 (83)打印问题 (86)联系客户支持 (110)升级和迁移 (112)硬件 (112)软件 (117)固件 (118)注意事项 (119)索引 (124)安全信息约定注意:注意指出可以帮助您的信息。
METTLER TOLEDO 840手动标签打印机说明书

840 Manual Label Printer Manual Weigh Price LabelerThe METTLER TOLEDO 840 Manual Label Printer is the ideal choice for grocery retailers who want to equip the meat backroom or look for a powerful label printer for W e i g h , W r a p a n d L a b e lFor more information/retailMettler-Toledo GmbH Heuwinkelstrasse 3CH-8606 Nänikon, Switzerland Phone:+41 44 944 22 11Subject to technical changes.© 02/2016 Mettler-Toledo GmbH Printed in Switzerland, 29230742Global MarCom Switzerland, 1832 RTTechnical data840 Manual Label Printer• Large label roll – longer production runs, higher operational uptime • Easy to use – reducing training time needed• Fast label printing – suitable for high volume label printing• Eye-catching labels – high quality printing with custom graphicsA One-Stop Shop for Backroom OptimizationMETTLER TOLEDO supports grocery retailers throughout the entire lifetime of their backroom solutions – by advising on productdecisions, installing and implementing the devices and systems, and providing maintenance and after-sales service as well as supplying consumables.ApplicationsManual label printing for price by weight or count items (scale included)Manual weighing, wrapping* and labeling Dual mode: 2 label printers can operate with 1 scale Print Speed 100 mm/sLabel PrinterDirect thermal print head Weighing Platter Stainless steel Weighing Capacity 0 – 6 Kg x 2 g 6 – 15 kg x 5 g Operating Environment - 5 ˚C – 45 ˚C Label Sizes38 - 80 mm width 30 - 200 mm lengthLabel RollInside diameter: 76 mm Outside diameter: 230 mm Power Supply240 V AC, Single Phase 50 – 60 Hz, 4 A RAM 34 MBOperating System Embedded Linux OSOperator InterfaceAdjustable 10,4 inch Color LCD touch-screen panel with positive input response Tactile keypad* requires hand wrap stationFor tray and film specifications associated to use with manual wrap station, please see hand wrap station specification.Dimensions in cm。
TP-Link无线宽带路由器TL-WR840N型使用说明书

2.1 产品简介 .........................................................................................................................3 2.2 主要特性 .........................................................................................................................3
11N 无线宽带路由器
TL-WR840N
本 详细配置指南 版
试 测
REV: 1.0.0 1910040102
声明
Copyright © 2010 深圳市普联技术有限公司 版权所有,保留所有权利 未经深圳市普联技术有限公司明确书面许可,任何单位或个人不得擅自仿制、复制、誊抄或转译本 书部分或全部内容。不得以任何形式或任何方式(电子、机械、影印、录制或其他可能的方式)进 行商品传播或用于任何商业、赢利目的。
第 5 章 配置指南......................................................................................................... 12
试 5.1 启动和登录....................................................................................................................12
利盟M700打印机维修手册
如果你的打印机没有完成加电自检 POST ,则从下表来确定故障和建议的维修步骤
BsureXie 21-2-03
办公设备维修手册网
5
POST故障现象表
故障现象
•没有电源或状态指示灯 •电机不转 •进纸齿轮不转 •拖车没有移动 •拖车撞向两边 •CIS(光电传感器)没有移动 •CIS(光电传感器)灯管没有亮
3.诊断方法 4.维修信息 5.部件分类
包含用于确定或复现扫描仪/打印机/复印机故障现象的测试和检查
提供打印机调整和维修更换部件拆装指导 包含每个维修更换部件的图示和部件编号
BsureXie 21-2-03
办公设备维修手册网
1
1.一般信息
M700是机电式扫描仪 打印机 和复印机(4406-001) 使用热泡非接触式打印方式 打印头和墨 盒集成在一起 可以由客户自行更换 双喷头提供彩色和黑色打印
纸路维修检查:
先按如下步骤检查机器 •检查整个纸路 看是否有阻塞现象 •确认进纸器内没有过多的纸张 •确认打印机放置在水平台上
维修更换部件
1 •自动进纸组件 •中间结构组件
建议措施
检查取纸轮组是否磨损 检查下列是否磨损 •大小进纸辊组 •出纸辊 •星形辊 检查是否阻塞或损坏
2
3
•出纸传感器和弹簧
BsureXie 21-2-03
办公设备维ห้องสมุดไป่ตู้手册网
7
操作面板问题 故障现象
•按键无效 •电源或状态指示灯没有亮
建议措施
检查操作面板在接口板上的数据线JP3连接是否正常; 检查接口板与主板的数据线J1和电源线J2连结是否正常 然后运行 开机自检 POST 如果操作面板失效 则更 换操作面板组件 如果问题依旧 则更换接口板和主板
利盟C510手册
Finishing Menu Duplex Duplex Bind Copies Blank Pages Collation Separator Sheets Separator Source Multipage Print Multipage Order Multipage View Multipage Border
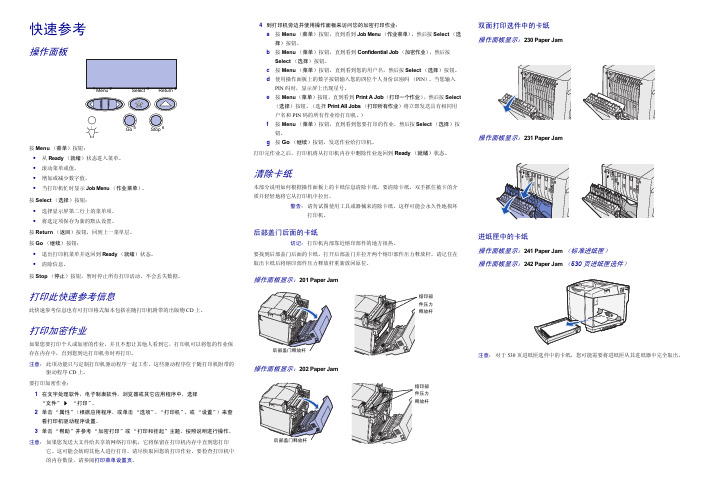
正确位置上。 4 如图所示,一起压住宽度导片凸片,并将导片滑动到与您所加载的介质尺寸相符的
正确位置上。 5 将介质放入进纸匣中,单面打印时推荐的打印面朝上,双面打印时打印面朝下。请
勿使介质超过加载线。 6 如果您加载标准法律用纸进纸匣选件,请关闭盖板。 7 重新插入进纸匣。
加载信签纸
根据已安装的选件,信签纸必须按不同方式加载。
后部盖门释放杆
操作面板显示:202 Paper Jam
熔印部 件压力 释放杆
注意: 对于 530 页进纸匣选件中的卡纸,您可能需要将进纸匣从其进纸器中完全取出。
后部盖门释放杆
加载进纸匣
宽度导片
加载线
长度导片
纸张尺寸 指示器
将介质加载到标准进纸匣或进纸匣选件中。所有进纸匣以相同的方式加载。
1 取出进纸匣。 2 如果您加载标准法律用纸进纸匣选件,请打开盖板。 3 如图所示,一起压住长度导片凸片,并将导片滑动到与您所加载的介质尺寸相符的
Lexmark X264dn、X363dn、 X364dn 和 X364dw 说明书

加载纸张和特殊介质.............................................................................39
设置“纸张尺寸”和“纸张类型”............................................................................................39 配置 Universal 纸张设置...........................................................................................................39 避免卡纸...................................................................................................................................40 加载进纸匣................................................................................................................................41 使用多功能或手动进纸器..........................................................................................................45 纸张容量...................................................................................................................................50 进纸匣连接和解除连接..............................................................................................................51
Lexmark 打印机连接指南说明书

Connection guide(連線指南)適用於本端連接印表機的 Windows 指示安裝 Windows 適用印表機軟體之前本機連接印表機是指使用 USB 電纜或平行電纜連接至電腦的印表機。
安裝這類具有 USB 電纜的印表機時,在連接 USB 電纜之前,您必須先安裝印表機軟體。
如需詳細資訊,請參閱安裝說明文件。
您可使用軟體與說明文件光碟,來安裝所需的印表機軟體,且適用於大多數的 Windows 作業系統。
請注意:如果軟體與說明文件光碟不支援該作業系統,則必須使用「新增印表機精靈」。
Lexmark 網站上也可能提供印表機軟體的更新項目,網址如下:。
使用光碟安裝軟體1請放入軟體與說明文件光碟。
等待「歡迎使用」畫面出現。
若一分鐘後未出現「歡迎使用」畫面,請執行下列各項:a按一下開始,然後按一下執行。
b在「開始搜尋」或「執行」方框中,輸入D:\setup.exe,其中D是指您 CD 或 DVD 光碟機的代號。
2按下Enter。
3選取安裝印表機和軟體。
4按一下同意,表示同意「授權合約」。
5選取建議使用,然後按一下下一步。
6選取本端連接,然後按一下下一步。
印表機軟體已複製到您的電腦。
7連接 USB 或平行電纜,然後開啟印表機電源。
這時會出現「即插即用」畫面,且「印表機」資料夾中會建立印表機物件。
使用「新增印表機精靈」安裝軟體您可以安裝印表機軟體於下列作業系統:•Windows 98 First Edition(不支援 USB)•Windows 95(不支援 USB)1請放入軟體與說明文件光碟。
如果光碟自動起始,請按一下結束。
2按一下開始✦設定✦印表機,然後按一下新增印表機來起始「新增印表機精靈」。
3當系統提示時,請選取安裝本端印表機,然後按一下從磁片安裝。
4指定印表機軟體的位址。
該路徑應該類似D:\Drivers\Print\Win_9xMe\,其中D是您 CD 或 DVD 光碟機所在的位置。
5按一下確定。
得力DL-940K针式打印机操作手册 说明书
绪 言承蒙惠顾,购得DL-940K打印机。
操作手册详细阐述了本机的性能及操作方法,能指导您正确使用。
当您遇到疑问或机器发生故障时,此手册会带给您很大的帮助。
DL-940K在硬件方面别具特色,其采用高速打印头设计,打印速度高达210汉字/秒,打印头寿命达4亿次/针。
同时具备纸边界自动定位、击打力自动调整等多种智能化功能,轻松实现各类票据打印。
软件方面,DL-940K兼容所有STAR、EPSON和OKI 打印机,拥有打印针调整和断针自动补偿功能等技术,方便的自动撕纸、参数设置是其特色功能。
DL-940K外观时尚、性能强大、可靠性高,是税务、企业财务、保险、电信等行业部门用户的理想选择。
本产品信息如有更改,恕不另行通知。
本资料仅供参考。
除中国现行法律法规规定,得力集团不承担任何由于使用本资料而造成的直接或间接损失的责任。
得力集团保留最终解释权。
目 录第1章安装打印机 ...................................... 1-11.1开箱和检查 ...................................... 1-11.2放置打印机 ...................................... 1-21.3打印机部件 ...................................... 1-31.4载纸板的安装及拆卸 .............................. 1-51.5安装和拆卸色带盒 ................................ 1-61.6打印机和主机连接 ................................ 1-91.7连接电源 ....................................... 1-101.8安装打印驱动程序 ............................... 1-11第2章纸的安装和使用 .................................. 2-12.1选纸 ............................................ 2-12.2调校打印头间隙 .................................. 2-12.3使用单页纸 ...................................... 2-22.4使用链式纸 ...................................... 2-4第3章控制面板 ....................................... 3-13.1按钮及其指示灯 .................................. 3-13.2开机功能 ........................................ 3-33.3组合功能 ........................................ 3-63.4设置模式下的按键功能 ............................ 3-9第4章参数设置 ....................................... 4-14.1如何进行参数设置 ................................ 4-24.2系统设置 ........................................ 4-34.3纸张设置 ........................................ 4-74.4接口设置 ....................................... 4-134.5仿真设置 ....................................... 4-144.6其他设置 ....................................... 4-154.7纵向校正 ....................................... 4-174.8恢复出厂设置 ................................... 4-19第5章票据通设置和使用 ................................ 5-15.1票据通设置 ...................................... 5-15.2票据通的使用 .................................... 5-3第6章自定义页面 ...................................... 6-16.1摩擦纸页长调整 .................................. 6-26.2摩擦纸页首调整 .................................. 6-36.3摩擦纸左边界调整 ................................ 6-56.4摩擦纸底空调整 .................................. 6-66.5链式纸页长调整 .................................. 6-86.6链式纸页首调整 .................................. 6-96.7链式纸左边界调整 ............................... 6-106.8链式纸底空调整 ................................. 6-116.9撕纸位置调整 ................................... 6-12第7章故障和保养 ...................................... 7-17.1故障处理 ........................................ 7-17.2保养与维护 ...................................... 7-6第8章规格 ........................................... 8-18.1打印机规格 ...................................... 8-18.2字符集 .......................................... 8-48.3控制码摘要表 ................................... 8-108.3.1 ESC/P和LQ仿真控制码摘要表 ..................... 8-108.3.2OKI仿真控制码摘要表............................ 8-14附录1:电子电气产品有害物质限制使用的说明 ............. 9-1安全规范企业公开信息:1.售后服务请致电得力全国服务热线:400-185-05552.产品能耗:a. 本产品符合GB21521-2014《打印机、传真机能效限定值及能效等级》一级能效等级最高要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用户培训资料
打印机有两个标准500页进纸匣。
您也可以购买2x500 页进纸器选件,它有两个附加的500页进纸匣。
用同样的方法将打印介质加载到所有500页进纸匣中。
注意:加载2000 页双进纸匣和2000页高容量进纸器的步骤与加载500 页进纸匣的步骤不同。
注意:当正在打印作业或操作面板上的指示灯闪烁时不要取出进纸匣。
否则可能引起卡纸。
拉出进纸匣。
压住侧导片凸柱并将导片滑到进纸匣外面。
一、加载纸张加载页进纸匣
500 1 2
压住前导片凸柱,并将导片滑到与您加载的介质尺寸相符的正确位置上。
前后弯曲介质,使它们松散,然后将它们扇形展开。
不要折叠或弄皱介质。
对齐介质的边缘。
在进纸匣中加载打印介质,打印面朝上。
注意:确认打印介质的高度低于后部导片上的最大加载线。
否则可能会卡纸压住侧导片凸柱,滑动导片,使它刚好轻轻地接触到介质堆的边缘。
3 4 5 6
插入进纸匣。
2000页双进纸器包括两个进纸匣:一个850页进纸匣和一个1150页进纸匣。
尽管进纸匣的外观不同,但它们的加载方法是相同的。
拉出进纸匣。
7 1 加载2000页双进纸匣
压住前导片凸柱,并将导片滑到与您加载的介质尺寸相符的正确位置上。
前后弯曲介质,使它们松散,然后将它们扇形展开。
不要折叠或弄皱打印介质。
对齐介质的边缘。
2 3
在进纸匣中加载打印介质,打印面朝上。
注意:确认打印介质的高度低于后部导片上的最大加载线。
过量加载可能引起卡纸。
将进纸匣插入打印机中。
高容量进纸器可以容纳2000 张信纸、 A4纸张、实用纸张和JIS B5纸张(75克/米2 [20磅])。
拉出进纸匣。
4 5 1 加载2000页高容量进纸器
如果加载不同宽度或高度的打印介质,调节宽度和长度导片。
前后弯曲介质,使它们松散,然后将它们扇形展开。
不要折叠或弄皱打印介质。
对齐介质的边缘。
在进纸匣中加载打印介质,打印面朝上。
将预先打过孔的纸张装入进纸匣,孔朝着进纸匣的左边。
将信签(或页面顶部)朝着进纸匣的前部。
将进纸匣插入高容量进纸器中。
2 3 4 5 ••
当出现()时可订购一个新的打印鼓粉盒,以便当前鼓粉盒打印效果无法令人满意时可以更换。
关闭打印机电源。
向前拉开打印机的前门。
向外抽出旧的粉盒;之后,按左图所示的方向和位置,将新的粉盒插入打印机粉盒安装完毕
此时关好前门后打开电源,打印机将自动回到Ready状态,等待打印
打开耗材的包装,撕去上面的塑胶袋,以及除去上面的保护包装。
按照图示方向轻微晃动几下粉仓
二、更换耗材
鼓粉盒
132Toner Low 鼓粉不足
向外抽出旧的粉盒;之后,按左图所示的方向和位置,将新的粉盒插入打印机
注:之后拉开打印机的左侧门,如
图示
注:参考上图红色圈出的位置,用手扳住向外拉开即可
打开硒鼓的包装,撕去上面的塑胶袋,以及除去上面的保护包装。
如果还需要更换感光鼓(又叫硒鼓),请跟随下面的步骤:
645一定要打开侧门后才可以取放粉盒!
使用适当的打印介质(纸张,透明胶片,标签和卡片纸)能确保无故障打印。
详情请参阅打印介质使用指南,用户手册或随机光盘中相关内容。
并按相关提示正确加载打印介质。
:.建议在大量购买打印介质之前,可先试用一些准备用于打印机的介质来打印样张。
.不要过量加载打印介质,确定不要超过纸张容量标记。
.不要装入有褶皱的、有折痕的、潮湿的或卷曲的打印介质。
.当正在进行打印时,不要取出进纸匣。
.正确装纸,确认将可调节的导片放置在正确位置上。
纸张导片不要太紧地靠着打印介质。
.不要在同一进纸匣中装入不同类型和尺寸的纸张。
当发生卡纸时,打印机会停止工作,并显示信息。
请参考下列图示所指示的部位来检查并清除卡纸。
清除后按放(继续)按钮清除信息并恢复打印。
:.在取卡纸时不要用力拉拽,否则有可能损害打印机内部的部件。
.必须将整个输纸通道中的所有被卡打印介质清除掉。
.取出卡纸后,应拼接一下,看取出的纸张是否完整,不要将任何纸屑遗漏在机器内部。
将打印机的前门和侧门依次和好,稍后打开打印机电源,等待打印机显示Ready,即可继续使用打印机
三、清除卡纸
避免卡纸
6清除卡纸
7注意1 2 3 45注意123一、纸盒卡纸 (2xx卡纸)2xx Paper Jam Go
二、2000页进纸器
三、出纸口以及出纸部件处卡纸
警告:如果您拉动的时候打印介质没有马上移动,则停止拉动。
向下推并拉绿色控制杆,可以比较容易地取出介质。
确认取出了所有的纸张碎片。
四、传送纸路卡纸
信息
操作打印机要求与已加载的纸张不
同尺寸或类型的介质。
从指定的进纸匣中取出当前加载的纸张,然后装入要求的纸张。
或按按钮清除信息并使用当前加载入进纸匣的介质打印。
或取消当前作业。
打印机已准备好,要求将纸张插入多功能进纸器中。
将显示屏第二行上指定的纸张装入多功能进纸器中。
或按或按钮以忽略手动进纸请求并使用已经安装在
进纸匣之一中纸张打印。
或取消当前作业。
打印机准备接收和处理打印作
业。
发送作业进行打印。
打印机已接收到要打印的数据,
但是在等待命令或其它数据。
按按钮,打印缓冲区的内容。
或取消当前作业。
打印机没有准备好处理数据。
按按钮,使打印机准备好接收作业。
打印机正在放弃当前打印作业。
等待信息被清除。
或有时该信息表示驱动程序数据不符合打印机的期望。
如果情况再次发生,请尝
试从其它T620打印机驱动程序打印。
()
上部前盖门被打开或打印鼓粉
盒没有安装。
关上上部前盖门。
安装打印鼓粉盒。
()打印机处于减少电能消耗的省电状态。
按(按钮迅速地将打印机加热到正常的工作温度并显示(信息。
四、常见打印机信息
Change Tray <x>
• • Select • Load Manual • • Select Go • Ready Waiting • Go • Not Ready Go Flushing Buffer • • Close Door or Insert Cartridge ••Power Saver Go Ready (改变进纸匣)
(选择)(加载手动纸张)(选择)(继续)(就绪)
(等待)(继续)(未就绪)(继续)(正在清除缓冲区)关上盖门或插入鼓粉盒省电模式继续)就绪)<x>
W840打印机在接,或打印数
等待信息被清除。
按按钮以打开并取消当前作业。
打印机的电源被打开后,正在进
行一系列的启动自检。
等待信息被清除。
()
指定的进纸匣缺纸。
将纸张添加到进纸匣中以清除该信息。
()
打印机发现卡纸。
清理纸张通道。
虽然卡纸的部位会显示在显示屏的第二行上,还是必须将整个输纸通道内的纸清除掉。
()
安装的打印鼓粉盒不被支持。
拆卸该打印鼓粉盒,并安装一个支持的鼓粉盒。
打印机检测到打印鼓粉盒中的
鼓粉供应不足。
摇动打印鼓粉盒以利用剩余的鼓粉。
更换打印鼓粉盒。
按按钮清除该信息并继续打印。
信息会显示,直
到更换指定的鼓粉盒。
:以上信息只是一个快速参考,具体内容可查阅用户手册或随机光盘中
相关内容。
也可打电话与利盟公司联系,或上利盟公司网站查询(或)。
Busy
••Menu Job Menu Performing Self Test
Tray <x> Low
2<xx> Paper Jam
32 Unsupported
Toner Cartridge
88 Toner Low
•••Go Supplies (忙)
正收处理据。
(菜单)(作业菜单)(正在进行自检)
进纸匣<x> 缺纸2<xx> 卡纸打印鼓粉盒不被支持(鼓粉不足)
(继续)(消耗品)88注意。