联合花生收割机毕业设计
机械毕业设计984LB-1.3联合收割机总体与设计 说明书 最终版

摘要本文查阅了大量谷物联合收割机相关资料,对谷物联合收割机的发展历程、现状和趋势做了论述。
经过分析对比,对4LB-1.3联合收割机进行了总体设计,包括整体结构设计、割台和拨禾装置及输送行走装置和脱粒装置的选型、传动方式、主要性能参数和结构参数计算、传动机构分析和计算。
对偏心拨禾轮进行了具体设计和计算。
该机采用自走,可一次性完成收割、脱粒、分离作业。
本机器通过能力与适应能力均良好,能够在泥水深度不大于25cm的稻田中完成的正常收割任务。
脱粒装置为半喂入轴流式,脱净率高、破碎率低,分离性能好。
整机结构简单、制造成本低、可稻麦两用。
关键词:自走式;联合收割机;总体设计;传动装置AbstractThis thesis consults a lot of grain combine related data, discussed the development course of grain combine harvester, status and trend. After analysis and comparison, the 4LB-1.3 combine the overall design, including the overall structure design, the header and the reel device and a conveying walking device and a threshing device selection, mode of transmission, the main performance parameters and structure parameters, transmission mechanism analysis and calculation. The eccentric reel was calculated and the specific design and. This machine adopts self walking, can complete harvesting, threshing, separating operation. The passing ability and good adaptability in the mud, the depth is not more than the normal operations can be 25 cm in paddy field. Threshing device for semi feeding axial flow type, high threshing rate, low breaking rate, good separation performance. The machine has the advantages of simple structure, low manufacturing cost, rice and wheat dual-purpose.Keywords: self propelled; combine; overall design; transmission device目录摘要 (1)1 绪论 (2)2 水稻联合收割机总体设计及工作原理 (5)2.1 谷物收获机械应满足的技术要求 (5)2.2 联合收割机的设计类型 (5)2.3 联合收割机结构配置及悬挂 (5)2.4 水稻联合收割机的工作流程 (6)2.5 割台部分 (7)2.5.1 切割机构 (7)2.5.2 拨禾轮 (8)2.5.3 卧式输送带 (9)2.5.4 拨禾轮、割台、输送装置的相互布置 (10)2.6 夹持链输送装置 (10)2.7 脱粒装置 (11)2.8 分离集谷输送装置 (12)2.9 履带行走装置 (12)2.10 车架的选择 (13)2.11 机器总体配置 (13)3 参数设计与选择 (14)3.1 发动机的选择 (14)3.2 收割机的参数设计 (15)3.3 功率计算 (17)4 传动机构分析及计算 (19)4.1 各部分传动 (20)4.2 收割各部分机构转速计算 (21)4.3 各部分带轮的选择 (23)4.3.1 第一级输出带轮设计 (23)4.4 各部链传动 (26)4.4.1 第一级链轮设计 (26)4.4.2 传入夹持链动力链的设计 (27)致谢 (30)1 绪论水稻是中国主要粮食作物之一,种植面积近3000万公顷,约占世界水稻种植面积的统计。
联合花生收割机毕业设计
青岛理工大学毕业设计(论文)题目:收获机械加持输送机构设计院别:汽车与交通学院专业班级:09车辆工程2班学生姓名:***学号:*********指导教师:***2013年5月28日摘要针对国内花生种植面积相当大以及主要以人力畜力为主进行收获的现状,来设计香型的花生收割机械来提高效率解放人力。
本文主要设计研究了办喂入式联合花生收割机的各主要机构。
该机器的摘果、抖土及清选部件主要是由摘果滚筒、刮板输送带、清选风机、振动筛、螺旋输送器、抖土装置等组成。
主要的工作过程是:花生通过夹持装置喂入摘果滚筒,摘果后花生果经过抖土装置抖土后,再经过刮板输送带输送到振动筛,在振动筛和清选风机的联合作用下对花生进行清选,经淸选的花生果落入螺旋输送器被输送到一侧,最后输送进入收获箱箱。
本文的滚筒采用差相对辊组配式,抖土装置采用震动四边形结构,清选采用风筛组合式。
文中主要分析了各部件的工作原理,动力传递过程,论述了其工作过程,并做出了相应的理论分析,计算了每个零部件的结构尺寸、转速和功率。
AbstractFor so large area planting about peanut in China,.We harvest them depending on labour power and animal power. I feel like designing some machine to increase the efficiency.The stripping and cleaning parts of half feeding peanut combine have been designed and researched in the paper.The stripping and cleaning parts include picking cylinder,vibrated picker,air blower, crew conveyor and so on.The working process of the stripping and cleaning system is that :the unpicked peanut is conveyed to picking roller by holding device then the picked peanut is delivered to vibrated picker by paddle-type elevator,at last ,it is conveyed by crew conveyor with holes to classified box. In this paper the picking cylinder is back-roll type and the cleaning system is combined with vibrated picker and air blower. This paper mainly analyses the working principle of components,calculates the structure size ,speed and needed power of every parts,it also discusses the working process,and makes the corresponding theoretical analysis.目录摘要 (I)Abstract (I)目录 (1)1 前言 (3)1.1 设计的目的和意义 (3)1.2 花生收获机的国内外发展现状 (4)2 总体设计 (7)2.1摘果及清选装置的研究现状 (7)2.2 摘果、抖土及清选部件的主要研究内容及设计要求 (7)2.2.1 研究内容 (8)2.2.2 设计过程 (8)3 抖土机构设计 (9)3.1抖土部分的主要研究内容及设计要求 (9)3.1.1 研究内容 (9)3.1.2 设计要求 (9)3.2抖土部分工作原理及动力传递计算 (9)3.3抖土部分图纸 (11)4 摘果机构的设计 (13)4.1摘果机构的主要研究内容及设计要求 (13)4.1.1 研究内容 (13)4.1.2 设计步骤 (13)4.1.3 设计要求 (14)4.2摘果滚筒长度的确定 (14)4.3摘果滚筒转速的计算 (14)4.4摘果滚筒直径计算 (15)4.5摘果部分图纸 (16)4.6摘果滚筒的功率计算 (17)5 扶禾器和输送带的设计 (18)5.1结构分析 (18)5.2输送器部分 (19)5.2.1刮板输送器升运量的计算 (19)5.2.2 输送器功率计算 (20)5.3输送器链传动的设计计算 (21)5.3.1 链轮设计 (21)5.3.2 链轮轮廓计算 (23)5.4 卸粮开口的长度 (24)6 风机、筛子清选机构设计 (25)6.1 振动筛的设计计算 (25)6.2 逐稿器的设计计算 (26)6.3 清选风机的设计选用 (26)7 总结与展望 (28)7.1 总结 (28)7.2 展望 (28)参考文献 (30)1 前言1.1 设计的目的和意义花生是世界上广泛栽培的油料作物,同时也是主要创汇的农产品之一,我国自古至今就有大面积种植花生的传统,主要为人民提供食用油以及食用用。
4HL-6型三垄六行智能花生联合收获机的设计和试验

2021年9月农机化研究第5期4HL-6型三垄六行智能花生联合收获机的设计和试验岳丹松,王东伟,尚书旗,何晓宁,高增辉(青岛农业大学机电工程学院,山东青岛266109)摘要:目前,中国花生联合收获存在作业效率低、不同种植模式下适应能力弱及作业环境差异下收获效果差等突出问题。
为解决此类问题,研制了一种4HL-7型三垄六行智能花生联合收获机。
该机主要由扶秧挖掘装置、夹持输送装置、抖土装置、多垄汇集装置、摘果装置、风筛清选装置和集果装置等组成,借助航向角、俯仰角、横滚角、垄间距和垄挖掘深度等传感器,通过多垄参数智能调控系统,可完成在不同种植模式、不同作业环境下的3垄7行高质量联合收获作业。
田间试验表明:该机作业性能良好,作业行数7行,损失率0.9%,破碎率0.8%,含杂率3.5%,均符合花生收获机DG/T077-2019《农业机械推广鉴定大纲》要求,满足实际生产需要。
关键词:花生联合收获机;三垄六行;智能控制中图分类号:S225.7+3文献标识码:A0引言花生作为主要油料作物,国内种植面积已达533.8万hm2多[],种植上呈现地域分布广、地形地势多变,种植模式不一等特点,其收获环节的机械化水平高低直接影响了花生的生产效率和效益2。
目前,花生收获主要有两段式收获和联合式收获两种方式⑶,联合式收获又分半喂入式和全喂入式:2-5],笔者介绍的是半喂入式花生联合收获机。
市场上现有的该类花生联合收获机,主要以单垄两行花生收获为主,两垄四行花生联合收获机也逐渐得到了推广应用⑹。
随着机械化水平的逐年提高,这些机具目前都存在一些现实问题:一是收获效率低,收获的垄数有限,以单垄为主、两垄为辅,鉴于单趟收获垄数少,相同作业面积需要更多的收获时间;二是不具备实用化的作业环境调节能力,作业期间,收获台不能在线实时调节,当收获台上下或左右偏离垄型后,收获质量快速下降;三是现有两垄收获不能适应不同种植模式,我国花生种植地域不同,种植模式也不同,现有两垄收获机只能应用于特定垄距下的花生收获。
花生联合收获机的设计建议
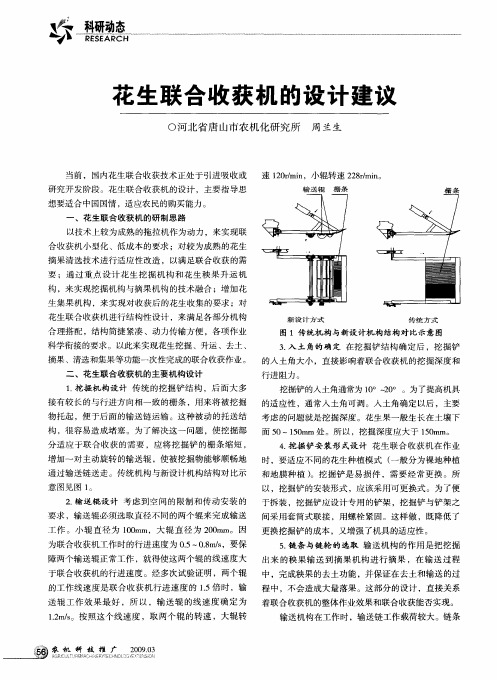
分适应 于联 合收获 的需要 ,应将挖 掘铲 的栅 条缩短 ,
4 挖掘铲安 装形式设 计 花生联 合收获机 在作业 .
增加一对主动旋转 的输送辊 ,使被挖掘物能够顺 畅地 时 ,要适应 不同的花生种植模 式 ( 一般分为裸地种植 通过输送链送走 。传统机构 与新设计机构结构对 比示 和地膜种植 ) 。挖掘 铲是易损 件 ,需 要经 常更 换 。所
构 ,来实现挖掘机构与摘果机构 的技术融合 ;增加花 生集果机构 ,来实现对 收获后 的花生收集的要求 ;对 花生联合收获机进行结构性设计 ,来满 足各部 分机构 合理搭配 ,结构简捷 紧凑 、动力传输方便 ,各 项作业 科学衔接 的要求 。以此来实现花生挖掘 、升运 、去土 、 摘果 、清选和集果等功 能一次性完成 的联合收获作业 。
卸料板能有效地杜绝花生秧被输送 链上 的捡拾齿
行进 阻力 。
挖掘铲的入土角通常为 1o ̄0 。为 了提高机具 0 2。
接有较长的与行进方 向相一致 的栅条 ,用来将 被挖掘 的适 应性 ,通常人土角可调 。人土角确定 以后 ,主要
物托起 ,便于后面 的输送链运输 。这种被 动的托送结 考虑 的问题 就是挖掘深度。花生果一般生长在土壤下
二、花生联合收获机 的主要机构设计 1 挖掘机 构设计 传 统 的挖 掘铲结构 ,后面大 多 .
新 设 计方 式 传 统方 式
图 1 传 统机 构 与 新设 计 机 构 结 构 对 比示 意 图
3 入土 角的确定 在挖 掘铲结构 确定后 ,挖掘铲 . 的人 土角大小 ,直接影响着联合收获机的挖掘深度 和
收割机毕业设计
收割机毕业设计收割机毕业设计毕业设计是大学生们在学业生涯中的一个重要环节,它不仅是对所学知识的综合应用,更是对学生综合能力的一次考验。
而我选择的毕业设计主题是收割机,这个看似普通的农机却蕴含着许多技术和创新的可能性。
首先,我将从收割机的结构和原理入手,深入研究其工作原理和设计要点。
在现代农业中,收割机的作用不可忽视,它能够高效地完成农作物的收割工作,提高农业生产效率。
因此,我将分析收割机各个部件的功能和相互配合关系,以及如何进行优化设计,使其更加高效和稳定。
其次,我将关注收割机的创新技术和发展趋势。
随着科技的不断进步,农业机械化已经成为现代农业发展的重要方向。
在收割机领域,各种新技术和新材料的应用也不断涌现。
我将研究收割机的自动化控制系统、传感器技术、智能化设计等方面的创新,探讨其对农业生产的影响和未来发展趋势。
另外,我还将考虑收割机在不同地区和农作物种类上的适应性问题。
由于不同地区的气候、土壤和农作物种类各不相同,因此收割机的设计也需要根据具体情况进行调整。
我将研究不同地区和农作物种类对收割机的要求,以及如何根据这些要求进行设计和改进,提高其适应性和灵活性。
最后,我将进行实地调研和实验验证。
毕业设计不仅仅是理论研究,更需要实践和验证。
我将亲自前往农田,观察和了解实际的收割机使用情况,与农民进行交流,了解他们的需求和意见。
同时,我还将进行实验室和田间试验,验证我设计的新方案和改进措施的有效性和可行性。
通过以上的研究和实践,我希望能够设计出一款更加高效、稳定和适应性强的收割机,为农业生产做出贡献。
同时,我也希望通过毕业设计的过程,提高自己的综合能力和解决问题的能力。
收割机毕业设计不仅是对自身专业知识的应用,更是对创新思维和工程实践能力的锻炼。
总之,收割机毕业设计是一个既具有挑战性又充满机遇的课题。
通过深入研究和实践验证,我相信我能够设计出一款更加先进和高效的收割机,为农业生产带来实际的效益和贡献。
4HB-2A型花生联合收获机的设计与使用
本栏编辑要进一步优化制定适宜全程机械化作业的农艺规范和机械化操作规程,统一甘薯的种植模式与作业模式,在甘薯株距、行距、垄高等指标方面实行标准化。
5.2完善需求机型配备在选配机械过程中,既要考虑先进性,符合现代农业发展的要求,又要考虑实用性,经济实惠;生产既能满足农业技术要求,又能实现全程机械化的多选性。
以薯苗移栽环节为例,引进先进的甘薯苗注水移栽机,指导农民广泛使用,有效解决目前人工栽植效率低、成本高的问题。
5.3进一步搞好农机购置补贴工作加大政策扶持力度,进一步完善农机购置补贴政策,搞好农机购置补贴工作,合理补贴机具范围与补贴额度。
5.4加大推广力度开展甘薯生产的旋耕起垄、移栽、田间管理、割蔓、收获全程机械化示范演示和推广,通过举办现场演示会的方式,探索制定适合太谷区特点和农机农艺要求的技术模式,做给农民看,带着农民干,提高农民专业合作社组织及广大农民应用技术的积极性和能力。
推进甘薯移栽、高效植保、甘薯杀秧、机械化收获作业服务市场化、专业化、规模化、产业化。
参考文献[1]陈雪英.甘薯机械化生产试验示范项目完成情况及主要做法[J].现代农业科技,2017(10):55,57.(作者单位:山西省太谷区农业机械发展中心)花生是我国四大油料作物之一,也是主要创汇农产品之一,其市场价格高于水稻、小麦、大豆、油菜等粮食和其他经济作物,是有较强国际竞争力的农产品。
多年来,花生的机械化收获一直是制约我国花生生产全程机械化的一大难题,随着其他大宗农作物机械化收获程度的不断提高,花生这一经济作物的机械化联合收获已迫在眉睫。
4HB-2A 型花生联合收获机是一种轮式自走半喂入联合收获机,适应垄作或平作花生的联合收获作业,可以一次性实现花生的分禾、扶禾、挖掘、起拔、输送、去土、摘果(果秧分离、清选(果土分离)、集箱(装袋)作业。
1整机结构型式和工作原理1.1结构型式4HB-2A 型轮式自走花生联合收获机(结构见图1)由底盘行走系统、动力系统、驾驶台、挖拔输送系统、半喂入摘果系统、清选系统、籽粒提升器、果仓、液压操作系统、链传动、胶带传动系统组成。
毕业设计-机械(花生)
2014届分类号:单位代码:10452毕业设计振动筛式花生收获机姓名学号摘要花生是传统的农作物,可以进行多种类深加工,现在花生产品和农业结构调整已经变成我国重点种植的农作物,其加工产品远销世界各地,在这种广阔的发展前景的推动下,花生生产势头猛涨,并有逐渐集中生产的趋势,一套成熟的产业链已经形成。
然而中国花生生产机械化发展却严重阻碍了花生产业的发展,传统花生收获主要依靠人工完成,劳动强度大、作业成本高、效率低、损失大,这些问题已经严重制约着其产业的长足发展。
本论文设计了振动筛式花生收获机的总体结构、工作原理、技术特点以及关键部件结构与工作参数设计等。
该设备主要由挖掘铲、振动筛、行走轮、动力传动装置及机架等组成。
此机械设备工作顺畅运行可靠,生产率:0.1~0.13hm2/h,荚果破碎率:≤1%,清土率高,损失率低,损失率:≤3%,,适用于个体较大规模的机械化生产,解放劳动力。
关键词:振动筛;平行连杆;挖掘铲;带轮AbstractPeanut is traditional plant, has become China's important export products and focus on the development of agricultural restructuring and support the cultivation of varieties. In the consumption structure and export structure adjustment and optimization of dual-drive, the rapid development of peanut production, and gradually the relative concentration of the main producing areas, with the basic formation of competitive industries. However, peanut production mechanization in China are seriously lagging behind, especially in the whole process of production, operating costs account for the production of harvesting operations, mainly rely on manual completion of the current, labor-intensive, operating costs are high, low efficiency, loss, and the high cost of development and production has become a major bottleneck in the growth of industry, mechanization of domestic peanut harvest technology and equipment needs of the increasingly urgent introduced a shaker-style peanut harvester of the overall structure, working principle and technical characteristics of the key components of the structure and design operating parameters. The device mainly by the mining shovel, vibration screen, vibration-drive components, running wheel, power transmission and chassis components, etc., two lines of a complete peanut harvesting, dug out the peanut seedling was sent to the shaker, after the vibration shaker to remove excavated soil associated with the peanut, and finally through the transportation board to achieve the side of peanut seedling lodging works. It has a smooth operation, Productivity:0.1~0.13hm2/h,Pods and broken rate: 1%,A high rate of soil, low loss, loss rate: 3%,reliable operation, high rate of land clearance。
新型花生联合收获机主要装置的设计 PPT

2.1关键装置设计
挖掘装置设计方案主 要有以下三种:
图2-2 摆动式挖掘装置
图2-1 铲链组合式挖掘装置 图2-3 挖拔组合式挖掘装置
挖掘铲主要参数 :入土角、铲面长度 、铲 刃斜角 、铲面宽度 、铲面离地面最高距离 等 夹持输送装置设计:
图2-9 链夹持输送式
图2-10 带夹持输送式
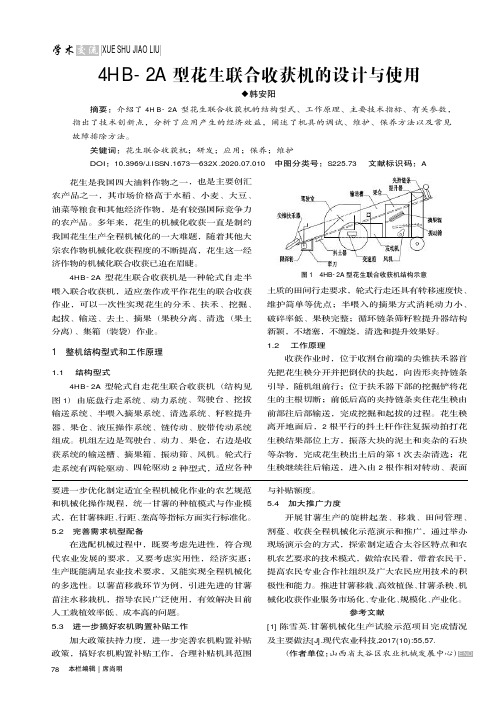
作业时,花生植株由扶禾器2分垄,挖掘铲 1挖掘花生,拨禾器2向中间夹持装置聚拢 花生植株。 夹持输送装置5夹住植株后向摘果装置输送。 输送过程中,拍土装置4进行去土。 植株在辅助喂入机构9作用下进入摘果机构。 在摘果滚筒10作用下进行摘果,植株由逐 稿器11和风机14共同作用逐出机器,花生 果通过凹板落向振动筛12进行清选。 清选后的花生果在横向输送搅龙13向一侧 输送,并由荚果升运器8运往集果箱7。
3)上下摆拍去土机构,模仿人工
田间去土原理,去土效果好、机械 掉果少,结构简单,动力传动可靠 高效。 4)摘果装置采用了全喂入轴流式 摘果方式,利用甩捋原理对鲜湿花 生直接进行摘果作业。
4、未来展望
论文中的工作原理分析、试验研究及获得 的有关结论,是在有限的时间下得到的, 加上本人基础理论水平的限制,使得一些 基础理论和试验研究有待于进一步深入开 展,建议今后重点从事以下几方面的研究: (1)每个行程只收获两行,生产率偏低; (2)挖掘部件偏置作业,侧向力较难平衡;
拔禾与抚禾装置 : 拨禾链纵向成交叉布 置,将收拢的花生拨 向夹持输送端,确保 花生能够连续喂入, 避免堵塞 。
上下摆拍式去土装置设计 :拍土板长度 、 拍土板的摆角 、摆动频率
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
青岛理工大学毕业设计(论文)题目:收获机械加持输送机构设计院别:汽车及交通学院专业班级:09车辆工程2班学生姓名:石云鹏学号:200924260指导教师:王丰元2013年5月28日摘要针对国内花生种植面积相当大以及主要以人力畜力为主进行收获的现状,来设计香型的花生收割机械来提高效率解放人力。
本文主要设计研究了办喂入式联合花生收割机的各主要机构。
该机器的摘果、抖土及清选部件主要是由摘果滚筒、刮板输送带、清选风机、振动筛、螺旋输送器、抖土装置等组成。
主要的工作过程是:花生通过夹持装置喂入摘果滚筒,摘果后花生果经过抖土装置抖土后,再经过刮板输送带输送到振动筛,在振动筛和清选风机的联合作用下对花生进行清选,经淸选的花生果落入螺旋输送器被输送到一侧,最后输送进入收获箱箱。
本文的滚筒采用差相对辊组配式,抖土装置采用震动四边形结构,清选采用风筛组合式。
文中主要分析了各部件的工作原理,动力传递过程,论述了其工作过程,并做出了相应的理论分析,计算了每个零部件的结构尺寸、转速和功率。
AbstractFor so large area planting about peanut in China,.We harvest them depending on labour power and animal power. I feel like designing some machine to increase the efficiency.The stripping and cleaning parts of half feeding peanut combine have been designed andresearched in the paper.The stripping and cleaning parts include picking cylinder,vibrated picker,air blower, crew conveyor and so on.The working process of the stripping and cleaning system is that :the unpicked peanut is conveyed to picking roller by holding device then the picked peanut is delivered to vibrated picker by paddle-type elevator,at last ,it is conveyed by crew conveyor with holes to classified box. In this paper the picking cylinder is back-roll type and the cleaning system is combined with vibrated picker and air blower. This paper mainly analyses the working principle of components,calculates the structure size ,speed and needed power of every parts,it also discusses the working process,and makes the corresponding theoretical analysis.目录摘要Abstract目录01 前言31.1 设计的目的和意义31.2 花生收获机的国内外发展现状52 总体设计82.1摘果及清选装置的研究现状82.2 摘果、抖土及清选部件的主要研究内容及设计要求92.2.1 研究内容102.2.2 设计过程103 抖土机构设计113.1抖土部分的主要研究内容及设计要求113.1.1 研究内容 (11)3.1.2 设计要求 (12)3.2抖土部分工作原理及动力传递计算123.3抖土部分图纸144 摘果机构的设计164.1摘果机构的主要研究内容及设计要求164.1.1 研究内容 (16)4.1.2 设计步骤 (16)4.1.3 设计要求 (17)4.2摘果滚筒长度的确定174.3摘果滚筒转速的计算184.4摘果滚筒直径计算194.5摘果部分图纸204.6摘果滚筒的功率计算205 扶禾器和输送带的设计215.1结构分析215.2输送器部分235.2.1刮板输送器升运量的计算235.2.2 输送器功率计算 (24)5.3输送器链传动的设计计算265.3.1 链轮设计 (26)5.3.2 链轮轮廓计算·275.4 卸粮开口的长度296 风机、筛子清选机构设计296.1 振动筛的设计计算306.2 逐稿器的设计计算316.3 清选风机的设计选用317 总结及展望337.1 总结337.2 展望33参考文献361 前言1.1 设计的目的和意义花生是世界上广泛栽培的油料作物,同时也是主要创汇的农产品之一,我国自古至今就有大面积种植花生的传统,主要为人民提供食用油以及食用用。
它的生产主要分布在亚洲、非洲和美洲,其中亚洲的种植面积最大,约占60%[1]。
我国的花生种植面积居世界第2位,占世界总面积的20%,预计2015年花生种植面积将达到600万hm2以上[2]。
花生的种植覆盖了我国绝大多数地区,除西藏、青海、宁夏、香港等省区外都有种植。
在长江以北,它的产地主要集中在北部华北平原、渤海湾沿岸地区。
而在长江以南,其主要产地则分布在南部华南沿海地区及四川盆地等。
以山东、河南、河北、广东、四川、江苏、安徽等7省为主,花生面积占全国72%,总产占全国79%。
这种集中的大面积种植主要和地形有关,花生主要在平原丘陵及盆地种植。
花生种植虽然不可避免受到天气的影响,不过作为一种高产作物,它的价格高于水稻、小麦、大豆、油菜等,经济效益相对较好,所以种植面积自古特别大。
所以在科技发展的今天,对机器解放人力的要求更加热切,加入WTO后,其它作物的经济效益进一步下降,花生的比较效益优势却更加明显[2]。
所以具有良好性能的联合花生收割机的制造是符合大众需求的,也是市场急需的。
发展花生种植及加工,提高其收获效率,从而最大限度的解放人力,实现机械化生产,是调整农业产业结构和增加农民收入的有效手段。
当前的现状是我国大部分花生产区仍以人力和畜力作业方式为主,耗时耗力且效率低。
由于长期以来花生被看作是经济作物,花生收获的机械化只不过是区域性的问题,花生收获的机械化没有得到足够的重视,导致其机械化生产发展速度比较缓慢,而花生种植者却早已盼望有专门的机器来帮助他们解放人力,提高效率。
使我国的花生机械化收获出现了一些突出的问题:第一,人工收获劳动强度大,效率低下。
随着社会发展及城市化的加速,近年来大量的农村劳动力进城务工谋生,这一矛盾更加突出,从而依靠机械的心情更加热切。
据初步估算,整个花生生产过程中,花生的收获所用工时为整个过程的三分之一以上。
这一阶段的作业成本为整个花生生产成本的二分之一以上,而通过机械收获则可大大降低。
第二,生产成本高。
目前的花生收获无论是人工还是畜力以及简易的机械,整个收获过程都不是一次性完成的,都要经过两道以上的工序,首先是将花生从土里挖掘,然后人工除土,这种生产方式的主要问题是造成较多的果实掉落,绝大多数果实遗落在地里,需要进行二次复收。
而此次的收货工程却需要付出相当的劳动强度及大量的劳动时间,而收获成果却颇微。
第三,耽误农时。
花生的收获季节,正值金秋农忙时节,劳动力更显珍贵,如果能缩短花生的收获日期,会对小麦播种打下一个良好基础[4]。
通过查阅资料,有些学者到农村实地考察,在山东省莱阳市,一般的沙壤地收花生(只完成花生的挖掘和去土两道工序),一个劳力每天工作8h,可收花生0.06hm2;借助畜力或者是简单的机力(用手扶拖拉机先耕出花生)每天可收花生面积也仅为0.13~0.2 hm2。
因此,解决花生收获过程中的机械化问题,设计研制新型的符合中国国情的花生收获装置是提高中国花生生产机械化水平,解放人力并提高收获效率的关键,大力发展花生收获机械化,对推进农业产业结构调整,促进农业增效、农民增收和提高农产品的竞争力,使得农村劳动力转移结构更加合理,实现农业现代化,全面建设小康社会都具有重要的意义。
在例如美国等农业大国机械化生产早已司空见惯,不仅可以及高效率,而且降低成本,从而出口创汇更加有利。
我国早日实现花生的收获机械化将更加有利于花生的创汇,无疑对我国农业发展和经济发展意义巨大。
而且随着广大农民群众对生产效率的要求越来越高,农民对集挖掘、输送、分离泥土、摘果、分离清选和集果功能于一身的花生联合收获机的需求也越来越迫切。
为此,本课题拟设计一种新型,高效,成本合理的花生联合收获机来满足农村对花生收获机械的实际需求。
花生联合收获机具有挖掘、输送、分离泥土、摘果、分离清选和集果的复合功能,该种机型成熟后,机器适用于较大面积的地块作业,具有生产效率高、收获损失率低等特点。
本课题为半喂入式花生联合收获机,整体采用侧向配置式,作业组件包括扶禾装置、挖掘装置、夹持输送装置、清土装置、摘果装置、清选系统和集果系统等。
摘果及清选部件是联合收获机的重要工作部件,直接影响收获后的花生质量。
因此,摘果及清选部件的性能直接影响着整个联合收获机的性能。
此次毕业设计希望能在导师的帮助下,利用自己的所学,通过了解国内外花生摘果及清选机械的现状及发展动态完成半喂入花生联合收获机摘果及清选部件的设计,满足摘净率、破损率、含杂率等方面的要求。
希望能解决目前花生收获过程中的一些问题并为自己以后的学习打下良好的基础。
1.2 花生收获机的国内外发展现状花生收获经历了撅刨、犁耕和机械收获等过程,收获作业包括挖掘花生、除土、铺条晾晒、捡拾、摘果和清选等作业。
由于世界各地经济、生产力发展不平衡,发达国家和地区的花生收获已全部实现机械化作业,而欠发达国家基本还是以人工和畜力为主[3]。
发达国家在花生生产机械化方面的研究较早,及其它农业机械相比,几乎是同步发展的,机械制造及应用技术己比较先进、完善。
美国、加拿大等发达国家已实现了花生生产全过程的机械化作业,在收获环节早已发展到联合收获水平,并且正依照本国的种植特点,向着大型化、机电一体化、智能化、高可靠、高安全的方向发展.一些发达国家还不断将高、精、尖技术应用到农业机械上来,农业机械正向智能化方向发展[4]。
发达国家(地区)的机械化花生收获主要有两种技术模式,一种是以美国为代表的大型全程机械化分段收获技术集成模式,由挖掘机、捡拾机、摘果机和秧蔓处理等设备分别完成挖掘、清土、摘果和秧蔓处理等作业;另一种是以日本和中国台湾省为代表的小型自走式联合收获技术模式,由一台设备一次性完成花生收获中的挖掘、清土、摘果和秧蔓处理等作业[5]。