51单片机驱动74HC595的编程及使用要点
74HC595详解
74HC595 详解
工作电压2-6V,推荐5V。
14 脚串行输入:595 的数据来源只有这一个口,一次只能输入一个位,那
幺连续输入8 次,就可以积攒为一个字节了。
13 脚OE 输出使能控制脚:如果它不工作,那幺595 的输出就是高阻态,595 就不受我们程序控制了,这显然违背我们的意愿。
OE 的上面画了一条线,表示他是低电平有效。
于是我们将他接GND。
10 脚SRCLR 位移寄存器清空脚:他的作用就是将位移寄存器中的数据
全部清空,这个很少用到,所以我们一般不让他起作用,也是低电平有效,于是我们给他接VCC。
12 脚RCLK 存储寄存器:数据从位移寄存器转移到存储寄存器,也是需要
时钟脉冲驱动的,这就是12 脚的作用。
它也是上升沿有效。
11 脚SRCLK 移位寄存器时钟输入:当一个新的位数据要进来时,已经进
入的位数据就在移位寄存器时钟脉冲的控制下,整体后移,让出位置。
分析下数据输入和输出过程:
假如,我们要将二进制数据0111 1111 输入到595 的移位寄存器中,下面。
51单片机+74HC595驱动数码管程序

51单片机+74HC595驱动数码管程序这里是电路图:完整的源码和图纸下载地址:51hei/bbs/dpj-20392-1.html下面是51 单片机驱动74hc595 芯片的程序:#include //包含51 单片机的头文件#include #define uint unsigned int#define uchar unsigned char//sbit sin_595 =P1;//sbit rclk_595 =P1;//sb it sclk_595 =P1 ;//sbit s_clr =P1;sb it a_cp_595 =P2; //串行移位时钟脉冲sh_cp_595sbit b_cp_595 =P2;//输出锁存器控制脉冲st_cp_595//sbit _oe_595 =P1 ; //8 位并行输出使能/禁止(高阻态)sbit ds_595=P2 ; //串行数据输入extern uchar datas[6]; //存放6 个数码管的显示数字uchar ledcode[]={0xC0,// 00xF9,// 10xA4,// 20xB0,// 30x99,// 40x92,// 50x82,// 60xF8,// 70x80,// 80x90,// 90x88,// A0x83,// B0xC6,// C0xA1,// D0x86,// E0x8E// F};void delay(uint z){uint t1,y;for(t1=z;t1>0;t1--)for(y=110;y>0;y--);}voidled_display(void){ uchar i,j; bit testb; uchar bdata movebit[6]; uchar bdata test; //_oe_595=0; //选中数码管for(i=0;i<6;i++) movebit[i]=ledcode[datas[i]]; // P1=0; delay(1); for(i=0;i<6;i++) //数据移位{ test=movebit[i]; for(j=0;j<8;j++) { testb=test&0x80; test=test<<1; if(testb) { ds_595=1; } else {ds_595=0; }a_cp_595=1; a_cp_595=0; } //数据移位} b_cp_595=0; b_cp_595=1; b_cp_595=0;} tips:感谢大家的阅读,本文由我司收集整编。
单片机如何与595连接

其实,看了这么多595的资料,觉得没什么难的,关键是看懂其时序图,说到底,就是下面三步(引用)/P>第一步:目的:将要准备输入的位数据移入74HC595数据输入端上。
方法:送位数据到P1.0。
第二步:目的:将位数据逐位移入74HC595,即数据串入方法:P1.2产生一上升沿,将P1.0上的数据移入74HC595中.从低到高。
第三步:目的:并行输出数据。
即数据并出方法:P1.1产生一上升沿,将由P1.0上已移入数据寄存器中的数据送入到输出锁存器。
说明:从上可分析:从P1.2产生一上升沿(移入数据)和P1.1产生一上升沿(输出数据)是二个独立过程,实际应用时互不干扰。
即可输出数据的同时移入数据。
而具体编程方法为如:R0中存放3FH,LED数码管显示“0”;*****接口定义:DS_595 EQU P1.0 ;串行数据输入(595-14)CH_595 EQU P1.2 ;移位时钟脉冲(595-11)CT_595 EQU P1.1 ;输出锁存器控制脉冲(595-12);*****将移位寄存器内的数据锁存到输出寄存器并显示OUT_595BR> CALL WR_595 ;调用移位寄存器接收一个字节数据子程序CLR CT_595 ;拉低锁存器控制脉冲NOPNOPSETB CT_595 ;上升沿将数据送到输出锁存器,LED数码管显示“0”NOPNOPCLR CT_595RET;*****移位寄存器接收一个字节(如3FH)数据子程序WR_595:MOV R4,#08H ;一个字节数据(8位)MOV A,R0 ;R0中存放要送入的数据3FHLOOP:;第一步:准备移入74HC595数据RLC A ;数据移位MOV DS_595,C ;送数据到串行数据输入端上(P1.0);第二步:产生一上升沿将数据移入74HC595CLR CH_595 ;拉低移位时钟NOPNOPsetb CH_595 ;上升沿发生移位(移入一数据)DJNZ R4,LOOP ;一个字节数据没移完继续RET而其级联的应用74HC595主要应用于点阵屏,以16*16点阵为例:传送一行共二个字节(16位)如:发送的是06H和3FH。
74hc595代码正极高电平
74HC595是一款常见的LED驱动芯片,通常用于驱动并联的LED灯串。
它具有串行输入和并行输出,可以将一条数据线上的数据转换为N条LED灯串的数据线。
在使用74HC595时,通常需要编写一些代码来控制其工作。
首先,我们需要了解74HC595的工作原理。
它通过串行数据输入线(通常是3条数据线)接收数据,然后将这些数据转换为并行输出,驱动LED灯串。
在74HC595中,高电平表示LED灯串的导通状态,低电平表示LED灯串的截止状态。
在正极高电平的情况下,也就是说,当数据线上的电平为高电平时,LED灯串导通。
这通常意味着我们在编写代码时需要将数据线上的数据设置为高电平状态。
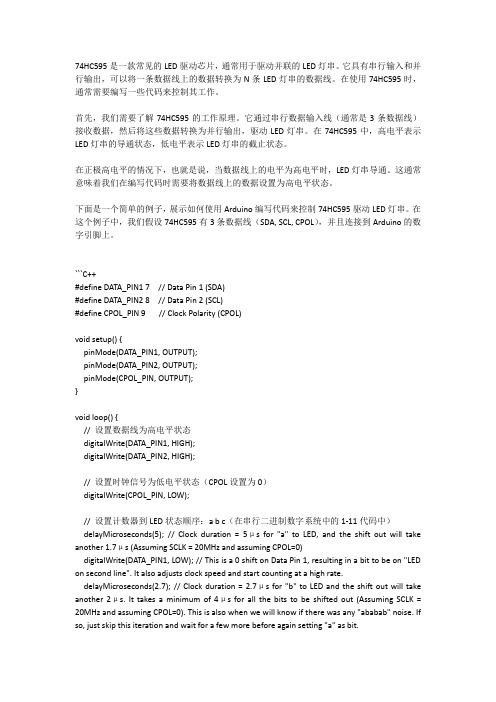
下面是一个简单的例子,展示如何使用Arduino编写代码来控制74HC595驱动LED灯串。
在这个例子中,我们假设74HC595有3条数据线(SDA, SCL, CPOL),并且连接到Arduino的数字引脚上。
```C++#define DATA_PIN1 7 // Data Pin 1 (SDA)#define DATA_PIN2 8 // Data Pin 2 (SCL)#define CPOL_PIN 9 // Clock Polarity (CPOL)void setup() {pinMode(DATA_PIN1, OUTPUT);pinMode(DATA_PIN2, OUTPUT);pinMode(CPOL_PIN, OUTPUT);}void loop() {// 设置数据线为高电平状态digitalWrite(DATA_PIN1, HIGH);digitalWrite(DATA_PIN2, HIGH);// 设置时钟信号为低电平状态(CPOL设置为0)digitalWrite(CPOL_PIN, LOW);// 设置计数器到LED状态顺序:a b c(在串行二进制数字系统中的1-11代码中)delayMicroseconds(5); // Clock duration = 5μs for "a" to LED, and the shift out will take another 1.7μs (Assuming SCLK = 20MHz and assuming CPOL=0)digitalWrite(DATA_PIN1, LOW); // This is a 0 shift on Data Pin 1, resulting in a bit to be on "LED on second line". It also adjusts clock speed and start counting at a high rate. delayMicroseconds(2.7); // Clock duration = 2.7μs for "b" to LED and the shift out will take another 2μs. It takes a minimum of 4μs for all the bits to be shifted out (Assuming SCLK = 20MHz and assuming CPOL=0). This is also when we will know if there was any "ababab" noise. If so, just skip this iteration and wait for a few more before again setting "a" as bit.digitalWrite(DATA_PIN2, HIGH); // This is a 1 shift on Data Pin 2. The last bit was low and the current bit is now being sent to the LEDs.delayMicroseconds(2.3); // Shift duration for "c" is around 2μs and then the shift out of the bits is complete.}```请注意,这是一个基本的示例代码,可能需要根据您的具体硬件配置和LED灯串连接进行调整。
74HC595n芯片驱动程序以及电路图

74HC595是具有8位移位寄存器和一个存储器,三态输出功能。
移位寄存器和存储器是分别的时钟。
数据在SHcp的上升沿输入,在STcp的上升沿进入的存储寄存器中去。
如果两个时钟连在一起,则移位寄存器总是比存储寄存器早一个脉冲。
移位寄存器有一个串行移位输入(Ds),和一个串行输出(Q7’),和一个异步的低电平复位,存储寄存器有一个并行8位的,具备三态的总线输出,当使能 OE时(为低电平),存储寄存器的数据输出到总线。
当MR(10引脚)为高电平,OE(13引脚)为低电平时,数据在SH CP 上升请看一个简单的程序自行读懂:sbit SDA1 = P0^0; //串行数据输入,对应595的14脚SERsbit SCL1 = P0^1; //移位寄存器时钟输入,对应595的11脚SCKsbit SCL2 = P0^2; //存储寄存器时钟输入,对应595的12脚RCK/*---------------------------------------------*/ unsigned char codeduan[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x 90};//0 1 2 3 4 5 6 7 8 9unsigned char codewei[]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};void delay2ms(void){unsigned char i,j;for(i=133;i>0;i--)for(j=6;j>0;j--);}/*---------------串行数据输入-----------------------------*/void 595_in(unsigned char Data){unsigned char i;for(i = 0; i < 8; i++) //循环8次,刚好移完8位{SCL1 = 0; //先将移位寄存器控制引脚置为低SDA1 = Data & 0x80; //取数据的最高位Data <<= 1; //将数据的次高位移到最高位SCL1 = 1; //再置为高,产生移位时钟上升沿,上升沿时数据寄存器的数据移位}}/*----------------并行数据输出----------------------------*/void 595_out(void){SCL2 = 0; //先将存储寄存器引脚置为低_nop_();//空操作SCL2 = 1; //再置为高,产生移位时钟上升沿,上升沿时移位寄存器的数据进入数据存储寄存器,更新显示数据。
74HC595按键显示实用程序

74HC595按键显示程序#include<reg51.h>#include<intrins.h>sbit DS=P1^1;sbit SH_CP=P1^2;sbit ST_CP=P1^3;sbit K1=P1^4;sbit K2=P1^5;sbit K3=P1^6;sbit K4=P1^7;unsigned char code duan[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,0xff,0xc6}; unsigned char code wei[]={0xfe,0xfd,0xfb,0xf7};char num1,num2,num3,num4,su,D,C,num_1,num_2;int A;void delay(int x)//延时{int a,b;for(a=0;a<=x;a++)for(b=0;b<=110;b++);}void num_in(char su)//数据输入{int j;for(j=0;j<8;j++){SH_CP=0;DS=su&0x80;su<<=1;SH_CP=1;_nop_();}}void num_out()//数据输出{ST_CP=0;ST_CP=1;_nop_();}void display()//显示子程序{num_in(wei[0]);num_in(duan[num_1]);num_out();delay(3);num_in(wei[1]);num_in(duan[num_2]);num_out();delay(3);num_in(wei[2]);num_in(duan[num3]);num_out();delay(3);num_in(wei[3]);num_in(duan[num4]);num_out();delay(3);}void display_1()//显示子程序1 {num_in(wei[0]);num_in(duan[num1]);num_out();delay(3);num_in(wei[1]);num_in(duan[num2]);num_out();delay(3);num_in(wei[2]);num_in(duan[num3]);num_out();delay(3);num_in(wei[3]);num_in(duan[num4]);num_out();delay(3);}void menu()//菜单程序0~9{switch(D){case 1: {num_1=10; num_2=10; num3=1; num4=11;};break;case 2: {num_1=10; num_2=10; num3=2; num4=11;};break;case 3: {num_1=10; num_2=10; num3=3; num4=11;};break;case 4: {num_1=10; num_2=10; num3=4; num4=11;};break;case 5: {num_1=10; num_2=10; num3=5; num4=11;};break;case 6: {num_1=10; num_2=10; num3=6; num4=11;};break;case 7: {num_1=10; num_2=10; num3=7; num4=11;};break;case 8: {num_1=10; num_2=10; num3=8; num4=11;};break;case 9: {num_1=10; num_2=10; num3=9; num4=11;};break;case 0: {num_1=10; num_2=10; num3=0; num4=11;};break;}}void xiugai() //修改按键{if(K2==0){delay(3);if(num1==10)num1=0;if(K2==0)num1++;while(!K2)display();}}void tuichu(){if(K1==0){delay(3);if(K1==0)A=!A;while(!K1)display();}}void shezhi() //设置按键{while(K1==1){int c,d;for(c=0;c<20;c++){xiugai();display_1();}for(d=0;d<20;d++){xiugai();display();}}}void xianshi()//显示按键{if(K1==0){delay(3);if(K1==0){while(K4==1)display_1();}while(!K1)display();}}unsigned char keyuse()//按键程序{if(K1==0){delay(3);if(K1==0)A=!A;while(!K1)display();}if(K2==0){delay(3);if(K2==0);while(!K2)display();}if(K3==0){delay(3);if(K3==0)shezhi();while(!K3)display();}if(K4==0){delay(3);if(K4==0){if(D==10)D=0;menu();D++;}while(!K4)display();}}void main()//主程序{while(1){keyuse();display();xianshi();}}。
74hc595的用法 -回复
74hc595的用法-回复74HC595是一种串行输入/并行输出的8位移位寄存器,被广泛应用于数字电路和嵌入式系统设计中。
它是通过串行数据输入的方式将数据存储在内部的8位移位寄存器中,并且可以通过并行输出的方式将数据输出到8个输出引脚上。
本文将一步一步回答有关74HC595的用法。
第一步:了解74HC595的引脚功能74HC595一共有16个引脚,每个引脚都有特定的功能。
以下是74HC595引脚的功能解释:- SER(Serial Data Input):串行数据输入引脚,用于输入要存储的数据。
- SRCLK(Shift Register Clock Input):移位寄存器时钟输入引脚,通过上升沿或下降沿的时钟信号,将串行输入的数据存储到移位寄存器中。
- RCLK(Register Clock Input):寄存器时钟输入引脚,通过上升沿或下降沿的时钟信号,将移位寄存器中的数据并行输出到输出引脚上。
- OE(Output Enable):输出使能引脚,通过控制该引脚的高低电平,可以使输出引脚处于高阻态或工作态。
- STCP(Storage Register Clock Input):存储寄存器时钟输入引脚,通过上升沿或下降沿的时钟信号,将移位寄存器中的数据存储到存储寄存器中。
- SHCP(Shift Register Clock Input):移位寄存器时钟输入引脚,通过上升沿或下降沿的时钟信号,将存储寄存器中的数据并行输出到输出引脚上。
- Q0-Q7(Parallel Data Outputs):并行数据输出引脚,通过并行方式输出存储在移位寄存器中的数据。
第二步:连接74HC595到微控制器为了正确使用74HC595,需要将其连接到微控制器或其他数字电路中。
以下是连接74HC595到微控制器的步骤:1. 将74HC595的VCC引脚连接到微控制器的电源引脚,并确保电压匹配(一般为5V)。
2. 将74HC595的GND引脚连接到微控制器的地引脚。
51单片机控制74HC595驱动的编程要点

51单片机控制74HC595驱动的编程要点51单片机编程要点51单片机控制74HC595驱动的编程要点:74595外形图______QB--|1 16|--VccQC--|2 15|--QAQD--|3 14|--SIQE--|4 13|--/GQF--|5 12|--RCKQG--|6 11|--SCKQH--|7 10|--/SCLRGND-|8 9|--QH'|_____|74595的数据端:QA--QH: 八位并行输出端,可以直接控制数码管的8个段。
QH': 级联输出端。
我将它接下一个595的SI端。
SI: 串行数据输入端。
74595的控制端说明:/SCLR(10脚): 低点平时将移位寄存器的数据清零。
通常我将它接Vcc。
SCK(11脚):上升沿时数据寄存器的数据移位。
QA-->QB-->QC-->...-->QH;下降沿移位寄存器数据不变。
(脉冲宽度:5V时,大于几十纳秒就行了。
我通常都选微秒级)RCK(12脚):上升沿时移位寄存器的数据进入数据存储寄存器,下降沿时存储寄存器数据不变。
通常我将RCK置为低点平,当移位结束后,在RCK端产生一个正脉冲(5V时,大于几十纳秒就行了。
我通常都选微秒级),更新显示数据。
/G(13脚): 高电平时禁止输出(高阻态)。
如果单片机的引脚不紧张,用一个引脚控制它,可以方便地产生闪烁和熄灭效果。
比通过数据端移位控制要省时省力。
注1)74164和74595功能相仿,都是8位串行输入转并行输出移位寄存器。
74164的驱动电流(25mA)比74595(35mA)的要小,14脚封装,体积也小一些。
2)74595的主要优点是具有数据存储寄存器,在移位的过程中,输出端的数据可以保持不变。
这在串行速度慢的场合很有用处,数码管没有闪烁感。
3)595是串入并出带有锁存功能移位寄存器,它的使用方法很简单,在正常使用时SCLR为高电平,G为低电平。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
74595外形图
______
QB--|1 16|--Vcc
QC--|2 15|--QA
QD--|3 14|--SI
QE--|4 13|--/G
QF--|5 12|--RCK
QG--|6 11|--SCK
QH--|7 10|--/SCLR
GND-|8 9|--QH'
|_____|
74595的数据端:
QA--QH: 八位并行输出端,可以直接控制数码管的8个段。
QH': 级联输出端。
我将它接下一个595的SI端。
SI: 串行数据输入端。
74595的控制端说明:
/SCLR(10脚): 低点平时将移位寄存器的数据清零。
通常我将它接Vcc。
SCK(11脚):上升沿时数据寄存器的数据移位。
QA-->QB-->QC-->...-->QH;下降沿移位寄存器数据不变。
(脉冲宽度:5V时,大于几十纳秒就行了。
我通常都选微秒级)
RCK(12脚):上升沿时移位寄存器的数据进入数据存储寄存器,下降沿时存储寄存器数据不变。
通常我将RCK置为低点平,当移位结束后,在RCK端产生一个正脉冲(5V时,大于几十纳秒就
行了。
我通常都选微秒级),更新显示数据。
/G(13脚): 高电平时禁止输出(高阻态)。
如果单片机的引脚不紧张,用一个引脚控制它,可以方便地产生闪烁和熄灭效果。
比通过数据端移位控制要省时省力。
注1)74164和74595功能相仿,都是8位串行输入转并行输出移位寄存器。
74164的驱动电流(25mA)比74595(35mA)的要小,14脚封装,体积也小一些。
2)74595的主要优点是具有数据存储寄存器,在移位的过程中,输出端的数据可以保持不变。
这在串行速度慢的场合很有用处,数码管没有闪烁感。
3)595是串入并出带有锁存功能移位寄存器,
它的使用方法很简单,在正常使用时SCLR为高电平, G为低电平。
从SER每输入一位数据,串行输595是串入并出带有锁存功能移位寄存器,它的使用方法很简单,如下面的真值表,在正常使用时SCLR为高电平, G为低电平。
从SER每输入一位数据,串行输入时钟SCK上升沿有效一次,直到八位数据输入完毕,输出时钟上升沿有效一次,此时,输入的数据就被送到了输出端。
<O></O>入时钟SCK上升沿有效一次,直到八位数据输入完毕,输出时钟上升沿有效一次,此时,输入的数据就被送到了输出端。
<O></O>
其实,看了这么多595的资料,觉得没什么难的,关键是看懂其时序图,说到底,就是下面三步
(引用)/P>
第一步:目的:将要准备输入的位数据移入74HC595数据输入端上。
方法:送位数据到 P1.0。
第二步:目的:将位数据逐位移入74HC595,即数据串入
方法:P1.2产生一上升沿,将P1.0上的数据移入74HC595中.从低到高。
第三步:目的:并行输出数据。
即数据并出
方法:P1.1产生一上升沿,将由P1.0上已移入数据寄存器中的数据
送入到输出锁存器。
说明:从上可分析:从P1.2产生一上升沿(移入数据)和P1.1产生一上升沿
(输出数据)是二个独立过程,实际应用时互不干扰。
即可输出数据的
同时移入数据。
而具体编程方法为
如:R0中存放3FH,LED数码管显示“0”
;*****接口定义:
DS_595 EQU P1.0 ;串行数据输入(595-14)
CH_595 EQU P1.2 ;移位时钟脉冲(595-11)
CT_595 EQU P1.1 ;输出锁存器控制脉冲(595-12)
;*****将移位寄存器内的数据锁存到输出寄存器并显示
OUT_595BR> CALL WR_595 ;调用移位寄存器接收一个字节数据子程序 CLR CT_595 ;拉低锁存器控制脉冲
NOP
NOP
SETB CT_595 ;上升沿将数据送到输出锁存器,LED数码管显示“0”
NOP
NOP
CLR CT_595
RET
;*****移位寄存器接收一个字节(如3FH)数据子程序
WR_595:
MOV R4,#08H ;一个字节数据(8位)
MOV A,R0 ;R0中存放要送入的数据3FH
LOOP:
;第一步:准备移入74HC595数据
RLC A ;数据移位
MOV DS_595,C ;送数据到串行数据输入端上(P1.0)
;第二步:产生一上升沿将数据移入74HC595
CLR CH_595 ;拉低移位时钟
NOP
NOP
setb CH_595 ;上升沿发生移位(移入一数据)
DJNZ R4,LOOP ;一个字节数据没移完继续
RET
而其级联的应用
74HC595主要应用于点阵屏,以16*16点阵为例:传送一行共二个字节(16位)
如:发送的是06H和3FH。
其方法是:
1.先送数据3FH,后送06H。
2.通过级联串行输入后,3FH在IC2内,06H在IC1内。
应用如图二
3.接着送锁存时钟,数据被锁存并出现在IC1和IC2的并行输出口上显
示。
编程方法:
数据在30H和31H中
;MOV 30H,#3FH
;MOV 31H,#06H
;*****接口定义:
DS_595 EQU P1.0 ;串行数据输入(595-14)
CH_595 EQU P1.2 ;移位时钟脉冲(595-11)
CT_595 EQU P1.1 ;输出锁存器控制脉冲(595-12)
;*****串行输入16位数据
MOV R0,30H
CALL WR_595 ;串行输入3FH
nop
NOP
MOV R0,31H
CALL WR_595 ;串行输入06H
NOP
NOP
SETB CT_595 ;上升沿将数据送到输出锁存器,显示
NOP
NOP
CLR CT_595
RET
&nbs。