模特排时法
模特排时法
涂装个别工位 各工种都有
60
74
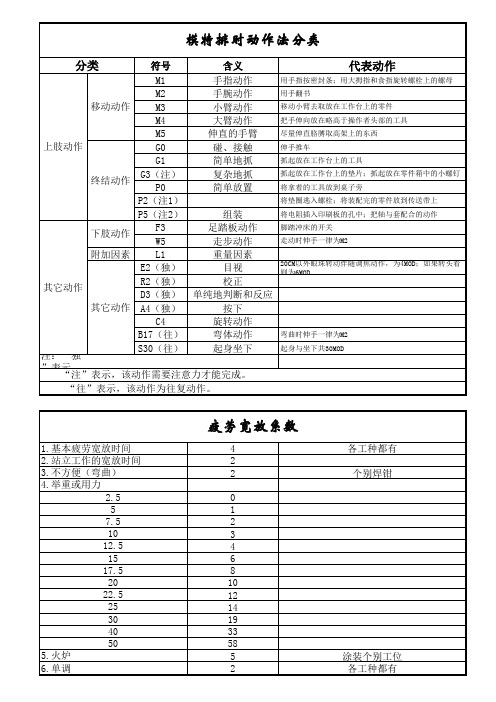
模特排时动作法分类
符号 含义 代表动作 用手指按密封条;用大拇指和食指旋转螺栓上的螺母 M1 手指动作 用手翻书 M2 手腕动作 移动小臂去取放在工作台上的零件 移动动作 M3 小臂动作 把手伸向放在略高于操作者头部的工具 M4 大臂动作 尽量伸直胳膊取高架上的东西 M5 伸直的手臂 伸手推车 上肢动作 G0 碰、接触 抓起放在工作台上的工具 G1 简单地抓 抓起放在工作台上的垫片;抓起放在零件箱中的小螺钉 G3(注) 复杂地抓 终结动作 将拿着的工具放到桌子旁 P0 简单放置 将垫圈逃入螺栓;将装配完的零件放到传送带上 P2(注1) 将电阻插入印刷板的孔中;把轴与套配合的动作 P5(注2) 组装 脚踏冲床的开关 F3 足踏板动作 下肢动作 走动时伸手一律为M2 W5 走步动作 附加因素 L1 重量因素 20CM以外眼珠转动伴随调焦动作,为4MOD;如果转头看 E2(独) 目视 则为6MOD R2(独) 校正 其它动作 D3(独) 单纯地判断和反应 其它动作 A4(独) 按下 C4 旋转动作 弯曲时伸手一律为M2 B17(往) 弯体动作 起身与坐下共30MOD S30(往) 起身坐下 注:“独”表示,只有在其它动作停止的场合独立进行的动作。 “注”表示,该动作需要注意力才能完成。 “往”表示,该动作为往复动作。
分类
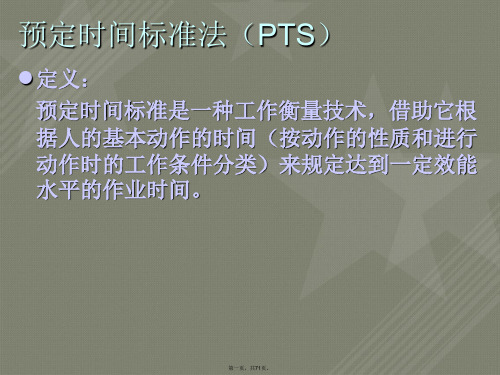
疲宽放系数
1.基本疲劳宽放时间 2.站立工作的宽放时间 3.不方便(弯曲) 4.举重或用力 2.5 5 7.5 10 12.5 15 17.5 20 22.5 25 30 40 50 5.火炉 6.单调 4 2 2 0 1 2 3 4 6 8 10 12 14 19 33 58 5 2 各工种都有 个别焊钳
MOD法简介

MOD法简介
1.MOD的简介:
预定时间系统法的一种(PTS-Predetermined time system),1966年由澳大利亚的海特博士创立﹐mod法即模特排时法﹐(modular arrangement of predetermined time standard)
2. 定义:正常的人手指动作一次的时间(相当移动的距离为2.5cm)就是1MOD; 1MOD=0.129秒
3.mod法共有21个动作﹕
A:上肢移动动作
M1---手指移动﹐参考距离为2.5cm
M2---手腕移动﹐参考距离为5cm
M3---小臂移动﹐参考距离为15cm
M4---大臂移动﹐参考距离为30cm
M5---伸直手﹐参考距离为45cm
B:终结动作﹕即移动动作最后要达到的目的动作
G0---无意识碰﹑接触
G1---简单地抓
G3---复杂﹑准确地抓
P0---简单地放
P2---较复杂(大概位置)地放入﹑嵌入﹑贴上等
P5---组装﹑放入﹑嵌入﹑贴上等
C:其它动作
F3---足踏板动作
W5---走步动作
L1---重量因素(有效重时2—6千克﹐每增加4千克则加1mod)
E2---目视
R2---校正
D3---判断﹑反应
A4---按下
C4---旋转
B17---弯体动作
S30---起身坐下。
MODAPTS(模特排时法)
时间
1924 1938 1948
1966
创始人
A.B. Segur J.H. Quick Shea/Koehler H.B. Maynard G.J. Stegemerten Schwab
G.C. Heyde
第七页,共71页。
PTS的特点
在作业测定中,不需要对操作者的速度、努力程 度等进行评价,就能预先客观地确定作业地标准 时间;
第二十九页,共71页。
P 5 (注意)
需要注意力的放置 P5
将物体正确地放在所规定地位置或进行配合的动 作;
比P2更复杂,常需要伴有两次以上的修正动作; 自始至终需要用眼睛观察;动作中产生犹豫;
– 将螺丝刀的头放入螺钉的沟槽中; – 把飞轮套在轴上;
– 把旋钮装在电位器轴上;
– 把导线焊到印刷电路板上; – 把产品铭牌装在规定的位置; – 装插头;
由于手和小臂动作的方向关系,肘关节多少要前 后移动。肘关节的前后移动看作是主动作M3的辅 助动作。
M3的移动动作范围内,将可能的作业区域叫正常 的作业范围。
15cm
M3
第十九页,共71页。
大臂的动作 M4
伴随肘的移动,小臂和大臂做为一个整体,在自 然状态下伸出的动作。其时间值为4MOD,移动距 离一般为30cm。
– 把外存储器装在规定的位置上。
第三十页,共71页。
MODAPTS 动作分析
移动动作与终结动作的结合
有效时间 UT 指人的动作以外,机械或其他工艺要求发生的, 非动作产生的固有附加时间,需要准确测时。
第十五页,共71页。
MODAPTS 动作分析 移动动作
M1,M2,M3,M4,M5
第十六页,共71页。
工业工程试验七-模特排时法
实验七模特排时法一、实验任务用模特法确定装配195A型喷油泵的标准时间。
二、实验目的及训练要点1)掌握用模特排时法确定作业标准时间的方法和步骤。
2)能用模特排时法正确表示作业者的各种动作,正确区分作业者的同时动作、时限动作和被时限动作。
三、实验原理模特法是预定动作标准法的一种,是作业测定的一种新技术。
运用模特法,无需经过现场测试,只要根据工作物蓝图、工作地布置图和操作方法,就能预先计算出完成一项工作所需要的正常时间。
模特法根据人体工程学和疲劳研究的结果证明,动作速度太快会造成人的能量消耗过多,易引起疲劳;动作太慢,能量消耗也会增加,也容易引起疲劳。
速度与能量的关系是,当速度提高1%时,能量消耗也会随之增加约1%;速度下降到某一临界点后再减速1%时,则能量消耗反而增加0.5%。
模特法把能量消耗最低速度作为基准,使操作者的劳动紧张程度适当,因而使劳动者保持充沛的体力。
模特法把人的动作与时间融为一体,只要确定了人的动作,就可以知道动作所需的正常时间。
模特法有如下几个特点:1)动作时间是以手指一动2.5cm所需时间为最小单位(1MOD),身体其他部位动作的时间都用手指动作时间的整数倍来表达。
2)模特法把身体各个部位的动作划分为21种,其中11个为基本动作,10个为身体及其他动作。
3)1MOD的时间值表示确定为0.129S,使用中可根据实际情况适当调高或降低。
4)动作符号不但表示动作,而且也表示时间。
比如M3,即表示小臂的动作,也表示时间消耗3个MOD 。
动作符号和时间紧密结合,这是模特法与其他预定时间系统最大的区别,也是模特法的最大特点。
四、实验设备、仪器、工具及资料1)195A型喷油泵。
2)活扳手、一字型螺钉旋具、尖嘴钳。
3)“动作研究实验”改进后的动素图、工作地布置图。
4)MOD分析表。
五、实验内容及步骤本实验1人1组,研究内容仍然是195A型喷油泵的装配工作。
根据“动作研究实验”所确定的标准操作法,分析喷油泵装配过程中每个动作的模特表达式,并记录在MOD分析表中(见表2-7)实验步骤如下:1.明确195A型喷油泵装配的标准作业法根据“动作研究实验”所确定的改进后的动素图和工作地布置图,明确195A 型喷油泵装配的标准作业方法。
模特排时法

二、下肢和腰部動作
身體彎曲動作B17 表示從站立狀態彎曲身體(或蹲下、單膝觸
地)然後再返回原狀態的一整套動作。其時
間值為17MOD。B17後的上肢移動動作採用 M2。
二、下肢和腰部動作
坐下、站起來的動作S30 表示從坐姿狀態站起(包括用手將椅子向後
推的動作)並再回到坐姿狀態(包括用手將
被時限動作指同時動作中時間值較小的動作。
三、關於雙手同時動作的幾個注意問題
雙手同時進行需要注意力的終結動作分析 例如:某一作業左右手的動作為:左手
M4G3,右手:M3P5。因兩手都要做需要注
意力的終結動作,因此不能完全同時進行, 而只能局部同時。
三、關於雙手同時動作的幾個注意問題
左手先進行 左手: 移動M4 右手:與左手同時移動M3 G3 M2 P5
一、模特排時法的基本原理
模特排時法將人體動作分為:上肢基本動作、 下肢及腰部動作、輔助動作和其他符號等四
類。其中上肢基本動作有11種,下肢及腰部動
作有4種,輔助動作6種,共計21種動作及4種
反射動作符號和其他符號3種共計28種。
移动动作
手指动作 M1 手的动作 M2 小臂动作 M3 大臂动作 M4 肩部动作 M5
第三節 應用模特排時法須注意的事項
作業的改善 對特殊動作確定時間值 關於雙手同時動作的幾個注意問題
一、作業的改善
模特排時法主要用於作業時對人的動作分析,在動作 分析前應對整個生產過程進行作業程式分析和操作分
析。只有在作業程式和操作均優化的基礎上進行動作
分析才有意義。另外在進行動作分析的同時要考慮工 作地的佈置方法、工具和物料堆放方法的改善等。
其他符號
一、上肢基本動作
模特排时法

模特排时法模特排时法是预定动作时间标准(PTS)的重要组成部分之一。
1966年澳大利亚的哈依德博士(G.G.Heyde)在长期研究各种预定动作时间方法的基础上,根据人类工程学的一般原理和方法,开发出了简单、实用的模特排时法,英文原文是:Modular Arrangement of Predetermined Time Standard,简称为MODAPTS 法。
一、模特排时法的特点和用途模特排时法简单易学、方便实用,自60年代以来,在日本等国家流传很广,如丰田、索尼等公司普遍采用此法制定工时定额。
模特排时法的特点1、以手指的动作时间作为动作时间单位,其它身体部位动作时间与手指动作时间成倍数关系。
2、动作符号由字母和数码构成,符号的数码即是动作的时间值。
3、测定时不需要秒表等测时工具。
4、时间单位用MOD表示。
1MOD=0.215DM1DM=4.65MOD1MOD=0.129秒1秒=7.75MOD1MOD=0.00215分1分=465MOD1MOD=0.0000358小时1小时=27900MOD模特排时法的优点:1、应用的范围广,无论是直接的生产作业,还是工艺技术设计、行政管理、服务性工作都可以采用。
2、由于该法分类简单、易记,便于推广普及,无论是管理人员、技术人员,还是一般工人都可以使用此法,求得动作的标准时间。
3、可用来评价、改进各种作业方法,促进作业的合理化、科学化。
4、可减少定额制定的时间和工作量。
模特排时法的用途:1、计算纯工作时间,为制定标准时间提供依据。
2、改进和调整各工位,提高生产线各工位的均衡性。
3、为公司编制劳动定额计划提供依据。
4、对公司生产系统,产品设计,装配性能等进行评价。
二、模特排时法的动作分类模特排时法的动作分类如下表1所示,模特排时法的所有动作,分别用字母和数字组合成的符号表示。
将表示动作模型图与各符号标记结合在一起,更便于使用者记忆和掌握。
模特排时法将手指动作时间作为1MOD,将身体其它部位的动作时间表示成手指动作时间的倍数,如,手腕动作时间值是手指动作时间值的2倍,上臂动作时间值是手指动作时间值的3倍,等等。
工业工程动作分析之MOD法

模特法动作分析---其它动作
下肢和腰的动作 (2) 步行动作W5 运动膝关节,使身体移动或回转身体的动作。包括向前、向后、向横 侧,凡属用脚支配身体的水平移动的动作,时间值为5MOD
模特法动作分析---其它动作
下肢和腰的动作 (3) 身体弯曲动作B17 从站立的状态到弯曲身体,蹲下,单膝触地,然后再返回原来的状态 的整个过程,时间值为17MOD
工业工程动作分析
-MOD法
IE组:王滨
日期:2017年6月8日
目录
1、模特法的基本原理
内 容 概 要
2、模特法的特点 3、模特法的动作分类 4、模特法的动作分析 5、动作改进
模特法基本原理
模特排时法简称模特法或MOD法,MOD法是以操作时的身体部位为基 础1MOD=0.129s
5cm
举例:将元件插在电路板上。
模特法动作分析---移动动作
(3) 小臂的动作 M3
肘关节以前的 (包括手、手指)的动作,时间值为3MOD,移动距离为
15cm
举例:左手取未加工镜片
模特法动作分析---移动动作
(4)大臂的动作 M4
伴随肘的移动,小臂和大臂做为一个整体,在自然状态下伸出的动作,
是需要注意力的动作,时间值为2MOD
ቤተ መጻሕፍቲ ባይዱ
举例:将未加工镜片放入机台加工
模特法动作分析---终结动作
(6) 放置动作P5
将物体准确地放在所规定的位置或进行配合的动作,它是比P2更复杂
的动作。P5需要伴有2次以上的修正动作,自始至终需要用眼睛观察, 动作中产生犹豫,是需要注意力的动作,时间值为5MOD
(1)所有人力操作时的动作均包括一些基本动作。模特法把生产实际
预定动作时间标准法

预定动作时间标准法(PTS法)是国际公认的制定时间标准的先进技术方法。
它将操作者的作业,分解为预先规定的几个基本动作,然后代入这些基本动作的理论时间值,最后将各个时间值加和再予以宽放即得到标准作业时间。
PTS法显著的特点就是无需进行时间观测,只要了解操作的动作序列,查表中的标准时间值便可以制定岀标准时间,使用起来非常方便快捷。
表中的数据由大量实验研究所确定,因而PTS法具有很高的准确性。
比较著名的PTS法有模特计时法(MOD法)、方法时间测定法(MTM法)、工作因素法(WF法)、WF简易法等等,其中最具代表性的是模特法。
模特排时法是PTS法的一种,它是澳大利亚的哈依德博士在1966年研究人体工程学的基础上创建的一种动作时间分析方法。
哈依德在研究过程中,总结了前人动作与时间研究成果,借鉴了WF法、MTM法中关于人类基本动作分解的思想,发现并创建了一个新的关于动作与时间研究的基本规律:"人体各部位动作不论快还是慢,无论是谁,如果是同一动作,其最快速度与正常速度所用时间之比,都是相等或十分接近的“。
研究过程中,他还把人类工程学的原理应用其中,做了大量的实验,运用统计方法,按照能量消耗与动作速度的关系,求出最佳能耗速度及其时间。
工人按照这种速度操作,不易产生疲劳,劳动生产率又得到了提高,把效率的提升建立在人性化管理的基础上。
MOD!中使用的时间单位是“ MOD,规定人的手指移动2.5厘米的时间为“ 1MOD,约为0.129s,人体其它动作时问均为这个时间的整数倍。
但当作业熟练程度不同时,MOD莫数也有区别,比如疲劳时1MOD(模数)应增加10%。
即疲劳时1MOD=0.129秒X 10%=0.142秒+0.129秒,一般熟练1MOD=0.129秒,熟练1MOD=0.1秒。
MOD!将人体动作分为3大类共21种基本动作。
其中第一类包含11个上肢的基本动作;第二类包含4个下肢和腰部的基本动作;第三类包含6个附加动作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
A B
C
19/27
HR-培训中心
按压动作分析实例
NO
左 动作内容
手(LH) 表达式 M4G1 M4P0 A4 模特数 5 4 4
右 表达式 M4G1 M4P0 A4
手(RH) 动作内容 握住机械摇柄 回转直到停下 加力
1 同右手 2 3
20/27
HR-培训中心
重量修正分析实例
模 特 排 时 法
1/27
HR-培训中心
模特排时法概述
� 预先为动作制定时间标准,来确定操作时间 ular Arrangement of Predetermined � Mod Modular ime Standards T Time � 1966年,由澳大利亚的哈依德博士创立
2/27
HR-培训中心
HR-培训中心
两手同时动作条件
1、两手的终结动作均不需要注意力时,可以同时动作; 2、只有一只手的终结动作需要注意力时,可以同时动作; 3、两只手的终结动作均需注意力时,不可能同时动作。
情况 一只手的终结动作 1 G0 P0 G1 2 G0 P0 G1 3 P2 G3 P5
另一手的终结动作 G0 P0 G1 P2 G3 P5 P2 G3 P5
双手动作先后不同,时间值也不相同
25/27
HR-培训中心
给工序制定ST简要步骤
① 选定中上熟练程度员工,按标准要求作业,拍摄操作动 ② ③ ④ ⑤
作录像; 分解左右手操作动作或UT时间,注意左右手操作动作状 态的对应;(UT时间内并行动作不计时间) 使用表达式替换动作,计算MOD及UT总时间; 初期可以采用秒表法验证模特排时结果,以免动作的遗 漏或者不必要动作的添加; 制造及项目工程各组成员对标准时间确认;
24/27
HR-培训中心
两手均需注意力时的分析方法
� 在桌上放置着较难抓取的零件A和B,两手分别抓 两个零件。
左手先动作:
No 1 左手动作 抓零件A M3G3 右手动作 抓零件B M4G3 标记符号 M3G3M2G3 MOD 11
右手先动作:
No 1 左手动作 抓零件A M3G3 右手动作 抓零件B M4G3 标记符号 M4G3M2G3 MOD 12
同时动作 可能 可能 不可能
22/27
HR-培训中心
时限动作
� 两手可以同时动作时,时间值大的动作叫时限动作; � 要用时限动作的时间值来表示两手同时动作的时间; No 左手动作
1
右手动作
标记符号
M4G1
MOD
5
抓零件(M3G1) 抓螺丝刀M4G1
� 建议非时限动作用()标记,它不影响分析结果。
23/27
26/27
HR-培训中心
讲师:刘伟伟 电话:33448 E-Mail:zhiyongli@
Thanks
27/27
HR-培训中心
手(RH) 动作内容
扶住工装 保持 从面前盒子取线圈上工装 按住工装 保持 取线圈上工装 用棉签刷平VC 引线 用棉签刷平第二条 VC 引线 按右边的VC 手移开
表达式
M2G1 H M3G1M3P5 M2G0 H M3G1M3P5 M3P2M2P2 M3P2M2P2 M2G0M1P0 M2P0
MOD=75
H
保持
UT
有效时间
13/27
HR-培训中心
模特排时分析使用表格
部门:装配二部(半自动线) 日期:2005/6/13 左 动作内容
1 2 3 4 5 6 7 8 9 10 取工装 拉开VC 固定插销 捏住插销 捏住另外一个插销 拉开插销 保持 松开手 接触左边的VC 按紧 传工装到下工位
产品名称:sabre 4A
终 结 动 作
G0
G1
需要注 意力的 动作
P2
(注意)
G3
(注意)
P0
不太需要 注意力 的动作
E2
Kg 2-6 2-6Kg
P 5 (注意)
L1 其 他 动 作 R2
(独)
(独)
(独 )
D3 No
Yes
A4
(独 )
W5
F3
C4
B 17
S 30
4/27
HR-培训中心
移动动作
5/27
HR-培训中心
反复反射动作
HR-培训中心
两手均需注意力时的分析方法
� 两手同时向目的场所移动,终了的瞬间,若某只手开始了 终结动作,另一只手就要在目的物附近稍微等待到第一只 手动作完后,再稍微移动M2,才能完成其终结动作。
移动动作 M3 左手 移动动作 M3 右手 1 2 3 4 5 6 7 8 终结动作G3 移动动作 在目的物旁等待 M2 终结动作G3 9 10 11 12 MOD
工 厂 内 基 本 动 作
12/27
HR-培训中心
分析时使用的必要符号
符号 BD 含义 延时 内容 一只手进行动作,另一只手什么动作也没有 做,即为停止状态,不给于时间值 用手拿着物体一直不动的状态。有时为了防 止零件倒下,而用作固定的工具也为H 指人动作之外的机械或其他固有的加工时间 。有效时间要用秒表确定其时间,或由工艺 技术人员提供标准资料
操作者:
工程名:粘接上VC线圈 分析者:Zhaohui Du 手(LH) 表达式
M4G1R2M4P2 M2G1M2P0 H M2G1 M2P0 H M3P0 M2G0 M1P0 M2G1M4P0
作业内容:从左前方取工装,取面前盒子的两个 VC上工装,整理引线,传到左边上驱动架工位 NO 右 模特数
13 5 12 3 2 12 9 9 3 7
NO 左 动作内容 1 同右手 2 3 4 5 手(LH) 表达式 M4G1 M4P0 L1×2 M5P0 L1×2 模特数 5 4 2 6 2 右 表达式 M4G1 M4P0 L1×2 M4P2 L1×2 手(RH) 动作内容 抓住机盒 抱起并用身体支撑住 重量修正 放在传送带上 重量修正
21/27
不修正 L1 L1×2 L1×3
10/27
HR-培训中心
圆周运动C4
�旋转1/2周以上的为旋转动作 �不到1/2周的为移动动作
11/27
HR-培训中心
21个动作回顾
M1 手 指 的 动 作 M2 手 的 动 作 移 动 M3 小 臂 动 作 动 M4 大 臂 动 作 上 作 M5 大 臂 尽 量 伸 直 (肩 部 )动 作 肢 基 反 复 反 射 动 作 (M1/2、 1、 2、 3) 本 G0 接 触 、 摸 的 动 作 动 摸 、 抓 动 作 G1 简 单 抓 取 动 作 终 作 结 G3 ( 注 ) 复 杂 抓 取 动 作 动 P0 简 单 的 放 置 动 作 作 放置动作 P2 ( 注 ) 放 置 动 作 P5 ( 注 ) 复 杂 放 置 动 作 F3 蹬 踏 动 作 W5 ( 往 ) 行 走 动 作 下肢和腰部基本动作 B17( 往 ) 弯 曲 身 体 动 作 S30( 往 ) 站 立 、 坐 下 动 作 L1 重 量 修 正 E2 ( 独 ) 眼 睛 动 作 R2 ( 独 ) 校 正 动 作 附加动作 D3 ( 独 ) 判 断 动 作 A4 ( 独 ) 按 压 动 作 C4 回 转 动 作 移 动 动 作
� 手指反复动作M1/2 � 手腕反复动作M1 � 小臂反复动作M2 � 大臂反复动作M3 � M5的动作一般不发生反射动作
6/27
HR-培训中心
终结动作
7/27
HR-培训中心
下肢和腰的基本动作
8/27
HR-培训中心
独立动作
9/27
HR-培训中心
重量修正L1
单手有效重量 未满2KG 2KG~6KG 6KG~10KG 10KG~14KG
有效时间=
14/27
合计时间=75×0.129=9.675s
HR-培训中心
移动及触及动作分析实例
按电源开关
NO 左 动作内容
1 什么也没做 2 3 4
手(LH)
右
手(RH) 动作内容
伸手接触开关 按开关 接触下一个开关 按开关
HR-培训中心
表达式 模特数 表达式
BD BD BD BD 3 1 2 1 M3G0 M1P0 M2P0 M1P0
原理
� MODAPTS把人的常用动作分为21种 � 条件相同时,不同人做同一动作的时间基本相等 � 身体不同部位做动作时,其时间值互成比例 � 一次手指动作的时间消耗1MOD=0.129秒
3/27
HR-培训中心
21个动作
移 动 动 作
5cm 2.5cm M1 M2 M3 15cm 30cm M4 45cm M5 1 MOD = = = 1 Sec 1 min = 0.129 Sec 0.00215分 7.75 MOD 465 MOD
15/27
移动(手指回转)动作分析实例
装4 8 2 20
16/27
右 表达式
M3G1 M3P5 M1G0M1P0
手(RH) 动作内容
取螺母 把螺母对准螺栓 拧入螺母
动作内容 表达式 模特数
1 拿着螺栓 2 3 4 H H H H
(M1G0M1P0)*10 继续拧入10次
HR-培训中心
放置(插电阻)动作分析实例
插电阻
NO 左 手(LH) 右 手(RH) 动作内容
抓电阻 将电阻的一端插入孔中 将第二端插入孔中 推入电阻
动作内容 表达式 模特数 表达式
1 什么也没做 2 3 4 BD BD BD BD 6 8 3 2 M3G3 M3P5 M1P2 M2P0
17/27
HR-培训中心
矫正动作分析实例
取二极管插件
NO 左 动作内容 手(LH) 表达式 模特数 6 3 5 2