主轴定向参数设定
主轴定位 介绍

大家在学习数控车床技术的时候,都已经知道大部分数控车床或加工中心上都有主轴定位(或叫主轴定向)功能,现在为能更清楚地了解该功能,笔者在这里就就数控车床主轴定位的分类、原理、调整方法、及常见故障等方面展开讨论。
主轴定位:通常主轴只是进行速度控制,但在一些特殊的情况下也需要对主轴进行位置控制。
例如:在加工中心上进行自动换刀时、镗孔加工中因工艺要求而需要让刀时,以及车床在装卡工件等时都需要主轴准确的停在一个特定的位置上。
这就是我们通常所说的主轴定向功能。
主轴定向功能就是NC发出定向命令,通过主轴上的位置传感器上的一转信号使主轴停止在一个确定的位置上,并向伺服电机位置环一样提供一定的保持力矩。
定位与定向是两个概念主轴定向是一点定位,而定位是任何角度主轴定向是对主轴位置的简单控制,可以选来作为位置信号的元件有:外接接近开关与电机速度传感器;主轴位置编码器;电机或内装主轴的内置传感器。
而根据使用的位置信号的不同参数设置也有区别。
数控车床主轴定位有两种,一种是靠伺服主轴电机自身构成C轴,主轴电机和主轴靠同步带连接(1:1)构成全闭环,可以CS轮廓插补,定位,刚性功丝。
另一种可以在主轴上加一个伺服电机用齿轮传动组成C轴造成主轴定位故障的原因主要来自下面三个方面:1、主轴定位检测传感器位置安装不正确,无法检测到主轴状态,造成定位时主轴来回摆动;2、主轴速度控制单元参数设置有误,使主轴定位产生误差或抖动;3、主轴停止回路调整不当,会使主轴在定位点附近摆动。
对于前两种原因引起的故障,可通过调整定位传感器的安装位置或修改控制单元有关参数消除;对于第三类原因引起的故障,只需调整主轴回路定位电位器即可排除。
加工中心主轴一般只能定向,不能定位,目的是用于换刀,镗孔时定向。
靠仅主轴尾端有一副检测元件(如光电开关,霍尔元件等),检测到定向信号后,主轴伺服电机会电磁锁紧定位(这类伺服电机一般编码器线数不高,定位精度低,但转速高),如果主轴定位不准确,可能会损坏刀库和主轴头。
FANUC的主轴定向角度调整

首页 > 共享屋 > 【经验】FANUC的主轴定向角度调整
28日
时间:2015-03-28 22:37
【经验】FANUC的主轴定向角度调整
4
分类:共享屋丨评论:16条评论丨浏览:315 浏览数丨字体:大中小
加工中心一般都配置换刀系统,在换刀的时候需要主轴定向,如果主轴定向角度调整
的不好,换刀的时候容易出现卡刀,、
但是如何调整定向位置呢?怎么确定定向位置的准确数值呢?
对于FANUC系统,定向位置的数值都是输入到系统参数4077中,但是输入的数值是
多少?一般需要通过诊断参数445里面的数值来确定,但是如果445里面的数值一直
为0 或者复位变为0该怎么办?
1 如果诊断445里面的数值一直未0,首先检查参数3117#1是否为1
2 开机是否执行过一次定向
3如果复位诊断445里面变为0,需要检查参数4016#7是否为0.
一般这样的问题就以上三点,你在维修的时候是否遇到这样的问题?。
KND主轴驱动器定向角度调整
凯恩帝郑州服务点2014-5-27 ZD100B 主轴驱动定向角度调整概述:当主轴因闷车或同步带过松而导致主轴定向角度发生变化,进而导致主轴无法正常换刀,此时需重新调整主轴驱动器定向角度。
解决方法如下(斗笠刀库)1、 首先将主轴抬高,高于刀盘伸出位置,此时通过按刀库伸出电磁阀让刀盘伸出,慢慢移动Z 轴使主轴靠近刀盘,对准主轴键槽位置与刀盘位置。
2、 打开电器柜,调整主轴驱动器(有红色KND 标志及型号为47P5GS 或4011GS 等)。
连续点击最左侧MENU 菜单键,找到- - U2 -,点击最右侧ENTER 按键,此时显示U2 0,0在闪烁,点击▲向上箭头找到A 并点击ENTER 。
记录当前显示值。
3、 连续点击MENU 菜单键,找到HP000,最后一个0在闪烁,点击▲改为1,并点击ENTER ;当显示-FN.0-时连续点击MENU 直到出现-FN.5-,点击ENTER ,显示Fn.5-0,其中0在闪烁,连续点击▲找到Fn.5-4并点击ENTER ,再次点击ENTER 当前显示值会闪烁,将所显示值改为第2步中记录的数值,可利用▲和>>进行移位修改数值。
当修改完毕后,点击ENTER ,数值停止闪烁,便已保存。
4、 将主轴升高,刀库拉回。
关毕机床总闸,三分钟后重新开启进行换刀验证。
注意:若为圆盘刀库,第一步中需将主轴升高,将机械臂刹车拉下,转动机械臂到扣刀位置,其他按以上顺序执行,第三步执行完毕后将机械臂摇回原位,刹车拉回。
ZD100主轴驱动定向角度调整概述:当主轴因闷车或同步带过松而导致主轴定向角度发生变化,进而导致主轴无法正常换刀,此时需重新调整主轴驱动器定向角度。
解决方法如下(斗笠刀库)1、 首先将主轴抬高,高于刀盘伸出位置,此时通过按刀库伸出电磁阀让刀盘伸出,慢慢移动Z 轴使主轴靠近刀盘,对准主轴键槽位置与刀盘位置。
2、 打开电器柜,调整主轴驱动器(有红色KND 标志及型号为400V7.5KW 或11KW 等)。
主轴定向步骤
第一步:恢复出厂参数:A0-03 = 3。
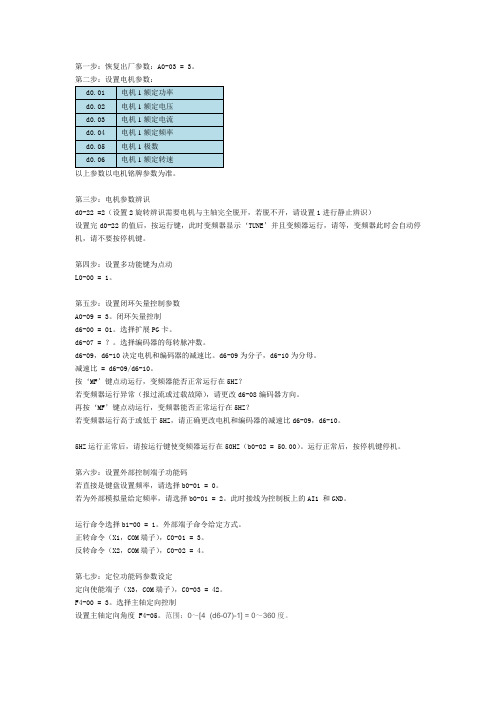
第二步:设置电机参数:以上参数以电机铭牌参数为准。
第三步:电机参数辨识d0-22 =2(设置2旋转辨识需要电机与主轴完全脱开,若脱不开,请设置1进行静止辨识)设置完d0-22的值后,按运行键,此时变频器显示‘TUNE’并且变频器运行,请等,变频器此时会自动停机,请不要按停机键。
第四步:设置多功能键为点动L0-00 = 1。
第五步:设置闭环矢量控制参数A0-09 = 3。
闭环矢量控制d6-00 = 01。
选择扩展PG卡。
d6-07 = ?。
选择编码器的每转脉冲数。
d6-09,d6-10决定电机和编码器的减速比。
d6-09为分子,d6-10为分母。
减速比 = d6-09/d6-10。
按‘MF’键点动运行,变频器能否正常运行在5HZ?若变频器运行异常(报过流或过载故障),请更改d6-08编码器方向。
再按‘MF’键点动运行,变频器能否正常运行在5HZ?若变频器运行高于或低于5HZ,请正确更改电机和编码器的减速比d6-09,d6-10。
5HZ运行正常后,请按运行键使变频器运行在50HZ(b0-02 = 50.00)。
运行正常后,按停机键停机。
第六步:设置外部控制端子功能码若直接是键盘设置频率,请选择b0-01 = 0。
若为外部模拟量给定频率,请选择b0-01 = 2。
此时接线为控制板上的AI1 和GND。
运行命令选择b1-00 = 1。
外部端子命令给定方式。
正转命令(X1,COM端子),C0-01 = 3。
反转命令(X2,COM端子),C0-02 = 4。
第七步:定位功能码参数设定定向使能端子(X3,COM端子),C0-03 = 42。
F4-00 = 3。
选择主轴定向控制设置主轴定向角度 F4-05。
范围:0~[4×(d6-07)-1] = 0~360度。
第八步:加速时间 b2-01 = 3.0 S减速时间 b2-02 = 3.0 S请设置最大频率b0-08 = ?。
三菱M70数控系统主轴外置接近开关定向功能
三菱M70数控系统主轴外置接近开关定向功能李洪波【摘要】For processing center machine, when it is not connected with 1:1 between spindle motor and spindle, it should add close-loop testing device at the side of spindle for the orientation function. Normally, a rotary encoder with 1024 pulses can be used. But, for some special machines, there is not enough space to fix the rotary encoder, and only can use a little testing device, for example, approach switch, etc. The article introduces that how to realize the spindle orientation function of MITSUBISHI M70 CNC with external approach switch.%对于加工中心机床,当主轴电动机和主轴非1∶1连接时,要实现定向功能,需要在主轴侧增加闭环检测装置,一般采用1024脉冲的旋转编码器.但是,对于某些结构特殊的加工中心机床,其主轴侧没有足够空间安装编码器,只能采用体积更小的检测器件,例如接近开关等.介绍三菱M70数控系统使用主轴外置接近开关时如何实现定向功能.【期刊名称】《制造技术与机床》【年(卷),期】2012(000)012【总页数】2页(P237-238)【关键词】接近开关;定向;三菱M70;主轴【作者】李洪波【作者单位】大连大森数控技术发展中心有限公司,辽宁大连116023【正文语种】中文【中图分类】TP273有些加工中心机床,为了提高主轴切削能力,通常,在主轴电动机和主轴之间会采用减速机或其他减速方式进行连接,用来增大主轴实际切削力矩。
新代系统主轴定向,第二参考点设置
新代系统主轴定向,第二参考点设置
(需要保证刀库和主轴上没有刀具)
1.将参数2803 参数3441改成9999
2.参数3420改成8
3.在寸动模式下,按一次F1(此时刀臂转动)
4.拍下急停,然后松开,打到手轮模式,把不带拉丁的刀柄放入到主轴侧刀臂内,移动Z轴,找到第二参考点,记录下机械坐标,把数值记录在参数2881和参数3441内!完成第二参考点设置!
5.把主轴定位键调整到刀臂键槽的中间,按F8调试功能!
6.按F2主轴应用调试
7.按F2定位调试
8.按F4,定位角教导!
9.按2次确定,完成设定!提高Z轴,取下刀柄!
10.拍急停,调至寸动模式,按F1,换刀臂动作,听到打刀缸松刀声音后,刀臂归位完成!
11.把参数3420改成0,完成主轴定向调试
CNC参数是数控机床的灵魂,数控机床软硬件功能的正常发挥是通过参数来“沟通”的,机床的制造精度和维修后的精度恢复也需要通过参数来调整,所以,如果没有参数,数控机床就等于是一堆废铁,如果CNC参数丢失,将导致数控机床瘫痪。
大家有什么想了解的可以留言,相互交流学习!共同进步!记录系统调试的点点滴滴,水滴石穿,每天进步一点点!。
主轴定向方法及参数
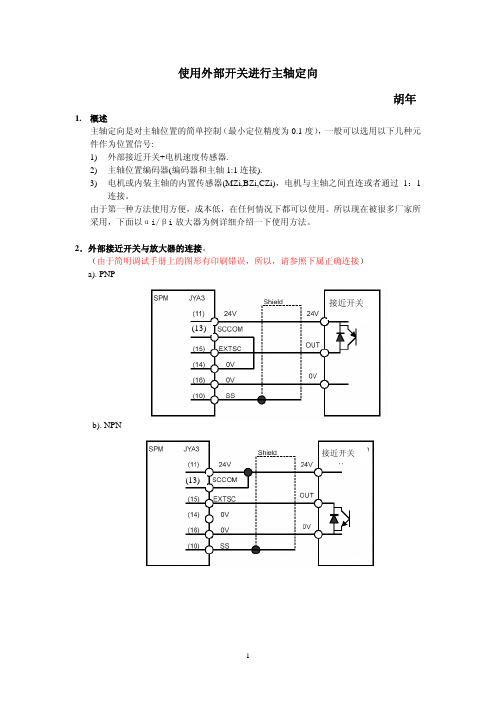
使用外部开关进行主轴定向胡年1.概述主轴定向是对主轴位置的简单控制(最小定位精度为0.1度),一般可以选用以下几种元件作为位置信号:1)外部接近开关+电机速度传感器.2)主轴位置编码器(编码器和主轴1:1连接).3)电机或内装主轴的内置传感器(MZi,BZi,CZi),电机与主轴之间直连或者通过1:1连接。
由于第一种方法使用方便,成本低,在任何情况下都可以使用。
所以现在被很多厂家所采用,下面以αi/βi放大器为例详细介绍一下使用方法。
2.外部接近开关与放大器的连接。
(由于简明调试手册上的图形有印刷错误,所以,请参照下属正确连接)a). PNPb). NPN(13)(13)接近开关接近开关c). 两线NPN3. 相关参数设定:参数号 设定值 备注 4000#0 0/1 主轴和电机的旋转方向相同/相反 4002#3,2,1,00,0,0,1 使用电机的传感器做位置反馈 4004#2 1 使用外部一转信号 4004#3 根据表1设定 外部开关信号类型 4010#2,1,0 0,0,1 设定电机传感器类型 4011#2,1,0 初始化自动设定 电机传感器齿数 4015#0 1 定向有效 4056-4059 根据具体配置 电机和主轴的齿轮比(增益计算用) 4171-4174 根据具体配置 电机和主轴的齿轮比(位置脉冲计算用)4. 外部开关类型的参数说明:1) 表1,参数4004#3的设定(对于αi/βi 放大器)开关 检测方式 开关类型 SCCOM接法(13)设定值二线 24V(11脚)0 NPN 0V(14脚) 0 常开 PNP 24V(11脚) 1 NPN 0V(14脚) 1 突起 常闭 PNP 24V(11脚) 0 NPN 0V(14脚) 0 常开 PNP 24V(11脚) 1 NPN 0V(14脚) 1 三线凹槽 常闭 PNP 24V(11脚) 0 注:检测方式如下图所示:(13)1突起 2凹槽接近开关 (两线)在实际调试中,由于只有0/1两种设定情况,可以分别设定0/1试验一下(注意,尽量使用突起结构,如果使用凹槽,则开口不能太大)。
FANUC主轴定向的调试步骤这么详细的教程不多了
FANUC主轴定向的调试步骤这么详细的教程不多了调试FANUC机器人的主轴定向时,以下是一些详细的步骤,以确保定向的成功。
1.确认机器人的主轴定向类型:在FANUC机器人上,主轴定向分为两种类型:直接定向和基准定向。
直接定向是根据主轴本身的编码器进行定向,基准定向是通过测量主轴和机器人轴的关系来进行校准。
需要根据机器人的配置确定使用哪种类型的定向。
2.准备定向工具:根据机器人配置和定向类型,准备相应的定向工具。
如使用直接定向,则需要使用主轴编码器读数仪和相应的传感器;如使用基准定向,则需要使用测距仪和角度传感器。
3.连接定向工具:将定向工具连接到主轴和机器人轴上。
确保连接安全可靠,并确保传感器能够准确读取相关数据。
4.定向参数的设置:根据机器人的配置和定向类型,进入机器人控制系统的参数设置菜单,设置定向相关参数。
这些参数包括主轴和机器人轴之间的关系、主轴编码器的分辨率等。
5.执行定向程序:根据机器人控制系统的操作界面,执行主轴定向程序。
根据具体的指导操作,逐步进行定向。
这些步骤可能包括启动主轴、采集数据、分析数据等。
6.定向结果的评估:根据定向程序的结果,评估定向的质量。
检查定向误差是否在可接受范围内,如何校准误差的大小等。
7.重新校准:根据定向结果的评估,判断是否需要重新校准。
如果定向误差在可接受范围内,则可以继续下一步操作。
如果定向误差较大,则需要重新调整定向参数,并重新执行定向程序。
8.定向结果的记录:记录定向结果,包括定向参数、定向误差等。
这样可以方便以后的参考和调整。
总结:以上是FANUC机器人主轴定向的详细步骤,根据机器人的配置和定向类型,可能会有一些差异。
通过仔细遵循上述步骤,并根据实际的情况进行适当的调整,可以确保主轴定向的成功。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
主轴定向参数设定
主轴定向角度调整及参数设定:
1.确认能够进行主轴定向(8135#4=0、主轴使用mzi传感器)
2.将参数3117#1=1(1、2两项设置完毕后需要断电)
3.手动旋转主轴使主轴定位块与刀杯定位块(或者机械手定位块)互相重合
4.通过诊断参数445确认主轴位置数据
5.将诊断参数445中的位置数据输入到参数4077或者4031(任选一个,但是两数相加
只和等于诊断参数445中的位置数据)中
6.设定参数6071=6(使用M6调用O9001换刀宏程序)
7.设定主轴定向速度,参数3732。
注意,在设定第二机械参考点之前要回参考点;在设定主轴定向角度之前需要运行一次主轴然后进行M19定向,看是否有位置数据
使用主轴电机内置传感器(mzi传感器)
6.3.2参数
使用外部一次旋转脉冲信号(接近开关)主轴电机内置传感器为mi或者mzi传感器参数设定
4056-4059 根据具体配置电机和主轴的齿轮比
4171-4174 根据具体配置电机和主轴的齿轮比
外部传感器开关类型的参数说明
开关检测方式开关类型SCCOM 接法(13) 设定值二线24V(11 脚) 0
突起常开NPN 0V(14 脚) 0 PNP 24V(11 脚) 1
三线
常闭NPN 0V(14 脚) 1
PNP 24V(11 脚) 0
凹槽常开NPN 0V(14 脚) 0
PNP 24V(11 脚) 1
常闭NPN 0V(14 脚) 1
PNP 24V(11 脚) 0
表1
注:检测方式如下图所示:
1突起2凹槽
对于主轴电机和主轴之间不是1:1的情况,一定要正确设定齿轮比(参数4056-4059
和4500-4503)。
根据赛场设备,定向器件为NPN型霍尔元件,主轴为缺口设计,故进行如下操作:
1、调整霍尔元件距离,使其与主轴距离在3-5mm,并固定。
2、将霍尔元件插口插到主轴放大器JYA3接口上。
3、进行主轴定向角度调整及参数设定。
4、进行NPN型霍尔元件外部一转信号参数设定,4000#0=0,4002#3.2.1.0=0.0.0.1,
4004#2=1,4004#3=1.。