机械式切纸机设计说明书
仨久软抽回旋切纸机电器部分操作说明书

双刀大回旋说操作说明此键盘为数字输入键盘,在点击输入框时将自动弹出此键盘进行数字输入此键盘为密码输入键盘,在点击需权限才能操作输入框或按钮时将自动弹出此键盘进行密码输入,输入正确后方可操作一、首页画面1、系统按钮:此按钮的作用是进入当前机器的操作系统画面,点击此按钮将进入自动操作画面进行自动操作【请参考自动操作画面说明】。
2、编号、日期:此处显示本机器的出厂编码与出厂日期,点击对应的输入框分别将自动弹出密码输入键盘,输入7级以上密码方可输入机器出厂编号或机器出厂日期。
3、隐藏按钮:此按钮的作用是进入PASSWORD1画面,点击此处的按钮将自动弹出密码输入键盘,输入2级以上密码方可进入PASSWORD1画面,进行第一段时间的设定和开启(关闭)【请参考PASSWORD1画面说明】。
4、隐藏按钮:此按钮的作用是进入PASSWORD 2画面,点击此处的按钮将自动弹出密码输入键盘,输入3级以上密码方可进入PASSWORD25 1 3 42画面,进行第二段时间的设定和开启(关闭)【请参考PASSWORD2画面说明】。
5、隐藏按钮:此按钮的作用是进入PASSWORD 3画面,点击此处的按钮将自动弹出密码输入键盘,输入4级以上密码方可进入PASSWORD3画面,进行第三段时间的设定和开启(关闭)【请参考PASSWORD3画面说明】二、自动操作1、程序停止按钮:此按钮的作用是停止机器,当机器在正常运行时点击此按钮机器将自动完成本包纸待切刀平衡后机器减速停机。
并停止机器的所有动作。
2、程序启动按钮:此按钮的作用是启动机器的执行程序,当满足启动条件的情况下点击此按钮机器将警告3秒后刀盘将自动运行,待点击正常运行按钮或回复运行按钮后机器将正常运行【请参考正常运行1 4267 93按钮或回复运行按钮说明】3、正常运行按钮:此按钮的作用是启动机器运行,当按下程序启动3秒待刀盘运行后且皮带内没纸或本条纸未被工作点击正常运行按钮机器将正常运行,若本条纸已经切过,点击此按钮将提示恢复运行,此时点击恢复运行按钮即可。
国威92切纸机说明书

国威92切纸机说明书摘要:1.国威92 切纸机的概述2.国威92 切纸机的主要部件和功能3.国威92 切纸机的操作方法4.国威92 切纸机的维护和保养5.安全注意事项正文:一、国威92 切纸机的概述国威92 切纸机是一款高效、实用的办公设备,适用于各种纸张的切割,是文秘、设计、印刷等行业的理想选择。
该产品具有结构紧凑、操作简便、切割精度高等特点,能够满足用户对纸张处理的多样化需求。
二、国威92 切纸机的主要部件和功能1.切纸刀:国威92 切纸机的核心部件,负责将纸张切割成所需尺寸。
2.刻度盘:用户可以通过刻度盘设置切割宽度,精确控制切割尺寸。
3.纸卷支架:用于固定纸卷,方便连续切割。
4.脚踏开关:用户可以通过脚踏开关控制切纸机的工作,提高操作便利性。
5.储纸箱:用于收集切割后的纸张,方便整理和收集。
三、国威92 切纸机的操作方法1.开机:接通电源,打开开关,使切纸机进入工作状态。
2.装纸:将纸张装入纸卷支架,确保纸张正确放置。
3.设置切割尺寸:旋转刻度盘,设置所需的切割宽度。
4.开始切割:踩下脚踏开关,切纸机开始工作。
5.关闭:完成切割后,关闭切纸机电源,切断电源。
四、国威92 切纸机的维护和保养1.定期检查切纸刀的锋利程度,如发现磨损,应及时更换。
2.每日工作结束后,应清理储纸箱内的纸屑,保持切纸机的清洁。
3.定期为切纸机润滑,以保证其正常工作。
4.若出现故障,应及时联系售后服务人员进行维修。
五、安全注意事项1.使用前,请仔细阅读说明书,了解产品性能和操作方法。
2.操作过程中,请勿用手直接接触切纸刀,以免造成人身伤害。
3.切纸机工作时,请勿离开工作区域,以免发生意外。
机械式切纸机设计说明书

机械式切纸机设计说明书作者姓名段大川专业机械设计制造及其及自动化指导教师姓名魏高峰专业技术职务教授目录摘要 (4)第一章绪论 (6)1.1切纸机简介 (6)1.2国内外研究现状 (7)1.3题目选取 (8)1.4机械式切纸机的特点 (8)1.5设计的要求 (8)第二章切断机整体装置设计 (8)2.1传动装置总体设计 (8)2.2电机的选用 (8)2.3传动装置各运动参数和动力参数 (10)2.3.1总传动比的确定及各级传动比的分配 (10)2.3.2传动装置运动和动力参数计算 (10)2.4带传动的设计 (11)2.5齿轮传动的设计 (13)2.5.1低速级齿轮传动设计 (13)2.5.2高速级齿轮设计 (17)2.6轴的设计 (21)2.6.1低速轴设计 (21)2.6.2中间轴设计 (23)2.6.3高速轴的设计 (24)2.6.4轴的校核 (24)2.7钢筋切断机的摩擦、磨损和润滑 (28)2.8丝杠选取和设计 (28)2.9手轮的设计 (29)第三章结论 (29)参考文献 (30)摘要本课题设计造纸行业的机械式切纸机的工作原理是:采用电动机经带传动减速后,带动偏心轮旋转,偏心轮推动连杆使滑块和刀片实现切纸的往复运动,通过气缸的气压带动压纸器实现压纸、手轮的旋转带动丝杠的运动从而实现了推纸板的运动,调节切纸的尺寸。
根据电机的工作环境选择电动机类型,采用立式安装,防护式电机,鼠笼式三相异步电动机。
选择带传动,它具有缓冲、吸振、运行平稳、噪声小、合过载保护等优点,并安装张紧轮。
切纸动力由电动机输出,通过减速系统传动,把动力输入到执行机构。
压制动力由气缸提供,通过连杆带动压纸板的运动。
推纸机构的运动是通过手动的手轮带动丝杠的旋转从而实现运动的。
关键词切纸压纸推纸偏心轮ABSTRACTThis topic in papermaking industry design of mechanical cutters work principle is: by using motor slowdown driven belt, promote, connecting eccentric eccentric to slide and realize the cutter blades, through the cylinder reciprocating motion of the pneumatic drive paper realize paper, ball screw rotation handwheel drives the movement realizes the push of exercise, adjust the cardboard cutter size.According to the motor working environment and the vertical motor type selection, installation, protective motor mouse cage three-phase asynchronous motor. Choose belt transmission, it has the buffer, vibration, low noise, smooth operation, overload protection, and install a wheel. Driven by motor output cutter, through the force transmission system, the input to the actuator. By pressing power cylinder rods, through the movement. Drive pressure cardboard, Push the movement of the handwheel is driven by manual ball screw rotation so as to realize the movement. Keywords paper cut ;Paperweights ;paper driving unit ;eccentric第一章绪论1.1切纸机简介切纸机是一种常用的纸张加工设备,其应用于生产已有上百年的历史。
切纸机机电一体化设备作业指导书.docx

XXXX纸业集团股份有限公司铜版纸厂动力车间名称切纸机机电一体化设备作业指导书修订时间2008-10-16版本01编号TBZWC03页数15适用范围传动完成专业一、需用工具:无具体内容:1、主控制面板PM02:位于主操作台附近(1列1):“电源启动背光按钮。
为了启动施丿的常规操作,按下该按钮。
一般在按下紧急停车,重新复位以后,需要启动该按钮。
该按钮启动以后,指示灯会闪烁约30秒钟,启动过程结束,指示灯会保持亮的状态。
(1列2)“机器启动”背光按钮。
该按钮可以启动机器的驱动系统(包括牵引部横向纵向切割部、传动装置传送带等)。
第一次按下该按钮,会出现开车鸣笛示警声,之后,操作员在四秒钟之内再次按下该按钮,机器将启动,并以20米的车速爬行。
(1列3)“机器停止”按钮。
按一次该按钮,纵切部分驱动系统会立即停止,而其余的机器传送带的驱动系统仍在运行。
再次按一次该按钮,驱动系统才会全部停止,否则,传送带的驱动系统将在几秒钟之后才会停止。
注意:如果机器在100米/秒以上的速度运行,而该按钮只按一次,切纸机在停止之前首先打开废纸门,然后降速,直到降到较低的速度才会停止。
连续按两次该按钮,不管切纸机处于何种速度运行,都将立刻停止。
由于横切大刀的切纸方式为剪切方式,所以上下刀片永远不能停在一起,所以机器启动时,切割器刀片开始转动的时间要比按钮按下的时间有一点滞后,这一点是很必要的。
(1列4)“增加降低快速传动带速度”选择器。
这是有三个位置的选择器,在中间的位置,不进行速度的调节,在其它两个位置可以增大或降低传送带的速度。
(2列1)“搭接吹风机启动”背光按钮。
如果切纸机运行并达到一定的速度(微机内部设定),按下该按钮,搭接吹风机将会启动。
如果切纸机停止或者在该速度以下运行,指示灯将闪烁,但仍不会有吹风。
当风机在运行期间,指示灯将一直是亮着的。
(2列2)“搭接吹风停止”旋钮。
按下该按钮,搭接吹风机会无条件停止,而不管切纸机处于何种状态(运行或停止)。
纸张加工器械使用说明书

纸张加工器械使用说明书一、概述纸张加工器械是一种专为纸张加工而设计的工具,在办公、印刷等领域中广泛应用。
本使用说明书将详细介绍纸张加工器械的使用方法、操作要点和注意事项,以便用户能够正确、安全地操作纸张加工器械。
二、产品结构纸张加工器械包含以下主要部件:1. 电动驱动系统:提供动力驱动器械运行;2. 切割部件:用于切割纸张;3. 折叠部件:用于折叠纸张;4. 排版部件:用于将纸张进行排版;5. 传输系统:用于将纸张从一处传送到另一处;6. 控制面板:用于设置器械的参数和监控器械运行情况。
三、使用步骤1. 开机准备a) 将纸张加工器械的电源线插入电源插座,并确保电源开关处于关闭状态;b) 检查刀片、折叠模具等部件是否安装牢固,并进行必要的调整。
2. 纸张切割a) 将待切割的纸张放置在切割台上,调整纸张位置并固定好;b) 打开电源开关,控制面板上的切割模式按键选择合适的切割方式;c) 操作切割启动按钮,开始纸张切割。
3. 纸张折叠a) 将待折叠的纸张放置在折叠模具上,并调整好纸张位置;b) 在控制面板上选择合适的折叠方式,并设置折叠参数;c) 操作折叠启动按钮,开始纸张折叠。
4. 纸张排版a) 将折叠好的纸张放置在排版区域,并调整好纸张位置;b) 在控制面板上选择合适的排版模式,并设置排版参数;c) 操作排版启动按钮,开始纸张排版。
5. 纸张传输a) 将纸张加工器械的传输系统调整为传送纸张的位置;b) 将纸张依次放置在传输系统上,并确保纸张正确传送到目标位置。
四、注意事项为了保证纸张加工器械的正常运行和用户的安全,请注意以下事项:1. 在使用纸张加工器械之前,确保已经阅读并理解了本使用说明书;2. 请勿将手指或其他物体伸入器械运行的区域,以免造成伤害;3. 定期检查器械的刀片、模具等部件是否磨损或松动,及时进行维护和更换;4. 使用过程中,注意保持清洁,避免灰尘或纸屑进入器械内部;5. 在使用纸张加工器械时,请确保周围环境安全,避免与其他物品发生碰撞。
印刷机械 程控切纸机-2023标准
印刷机械程控切纸机1范围本文件规定了程控切纸机(以下简称切纸机)的术语和定义、型式和基本参数、技术要求、检验方法、检验规则、标志、包装、运输和贮存。
本文件适用于本标准适用于采用程序控制、裁切各种平板纸张和其他类似纸质的软性材料的按输入程序循环工作的切纸机。
2规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T191包装储运图示标志GB/T1176铸造铜及铜合金GB2894安全标志及其使用导则GB/T4728电气简图用图形符号GB/T4879防锈包装GB5226.1—2019机械电气安全机械电气设备第1部分:通用技术条件GB/T6388运输包装收发货标志GB/T9439灰铸铁件GB/T9943高速工具钢GB/T9969工业产品使用说明书总则GB/T13306标牌GB/T13384机电产品包装通用技术条件GB/T14436工业产品保证文件总则GB/T20956—2007印刷机械切纸机设计及结构安全规则GB/T24342—2009工业机械电气设备保护接地电路连续性试验规范GB/T28387.1—2012印刷机械和纸加工机械的设计及结构安全规则第1部分:一般要求JB/T3090印刷机械产品命名与型号编制方法JB/T8115—2016印刷机械切纸机3术语和定义GB/T20956—2007、GB/T28387.1—2012界定的术语和定义适用于本文件。
4型式和基本参数4.1型式4.1.1按切刀和压纸机驱动方式分:a)液压切纸机——压纸器为液压传动的切纸机。
b)全液压切纸机——切刀、压纸器均为液压传动的切纸机。
4.2基本参数切纸机的基本参数应符合表1的规定。
表1基本参数序号项目基本参数1最大裁切宽度B/mm B<920920≤B<13701370≤B<2000B≥2000 2最大裁切长度/mm≥最大裁切宽度3最大裁切高度/mm≥100≥110≥140≥165 4工作台距地面高度/mm≥800(750)5工作台刀槽尺寸(宽×高)/mm10×4.5或16×166压纸器最大压力/N机械切纸机≥15000≥20000液压、全液压式切纸机≥20000≥30000≥400007裁切速度次/min≥47≥42≥358切纸机优先选用规格780、920、1150、1300、1370、1550、1680、1760、1860、2200、2600 4.3型号和名称切纸机的型号和名称应符合JB/T3090的规定。
纸张切割机使用说明书

纸张切割机使用说明书一、产品概述纸张切割机是一种用于对纸张进行精确切割的设备。
本说明书将详细介绍该设备的使用方法、操作注意事项以及维护保养等内容,帮助用户正确、安全地操作纸张切割机。
二、使用方法1. 设备准备a) 将纸张切割机放置在平坦、稳定的工作台上,并确保设备周围没有杂物阻挡。
b) 将设备插入电源,并确认电源正常接通。
c) 打开纸张切割机上部的盖板,确保刀片和固定夹具处于初始位置。
2. 尺寸调整a) 根据需求,选择相应的纸张切割尺寸,在切割尺寸调节器上进行设置。
b) 将待切割的纸张放置在工作台上,与设备对齐。
3. 纸张固定a) 将待切割纸张放入固定夹具中,并确保纸张四边均被夹住。
b) 轻轻按下固定夹具手柄,使纸张夹紧。
4. 切割操作a) 按下启动按钮,纸张切割机将开始工作。
b) 设备会自动进行切割操作,当切割完成后,纸张切割机将自动停止。
5. 安全注意事项a) 在操作纸张切割机前,请确保双手干燥,避免因手部滑动造成意外伤害。
b) 在设备工作时,不要将手部或其他物品靠近切割区域,以免受伤。
c) 在切割过程中,如遇到异常情况或切割不准确,请立即停止使用,并检查设备是否存在问题。
三、维护保养1. 设备清洁a) 在每次使用完纸张切割机后,应确保清理设备上的纸屑和其他杂物,保持设备的清洁。
b) 可使用干净、柔软的布擦拭设备表面,避免使用有腐蚀性或磨损性的清洁剂。
2. 刀片更换a) 根据设备使用频率,定期检查刀片的磨损情况。
b) 当刀片磨损严重或失去锋利度时,应及时更换新刀片,以确保切割效果和安全性。
3. 定期维护a) 定期检查设备的电源线和插头是否完好,并确保连接牢固。
b) 对设备的各个移动部件进行润滑,以确保操作的顺畅性。
c) 如设备长时间不使用,请拔出电源插头,并将设备存放在干燥、通风良好的地方。
四、故障排除若纸张切割机出现以下情况,请参考以下排除方法:1. 设备无法启动a) 检查电源是否接通,确认电源是否正常供电。
切纸机说明
切纸机结构说明简介本机是KB - 2100型号切纸机。
它的每个组成部分都具有特定功能和负载值。
主要部位的简要说明如下,其中未详细说明的机械部位有:气动和液压机械单位。
组成本机的主要单位都有一个或多个不同部位,这将在后面详细描述,为每个系统部位进行说明。
A 退纸架上卷数(2双/ 4卷轴)。
B 自动刹车控制B 卷曲消除系统25毫米钢筋(4)。
B 接头检测系统的电容板(2)C 双刀片自动定位纵向分切设备。
C 纸边抽吸系统除。
C 纸尘抽吸系统。
C 主要驱动部分。
C 纵刀底刀电机(二高转矩电机)。
D 快速皮带部分。
D 排纸门。
D 叠纸滑块部分,纸尾抽吸系统、叠纸吹风。
E 码纸台叠纸区域E 自动托盘推放区域。
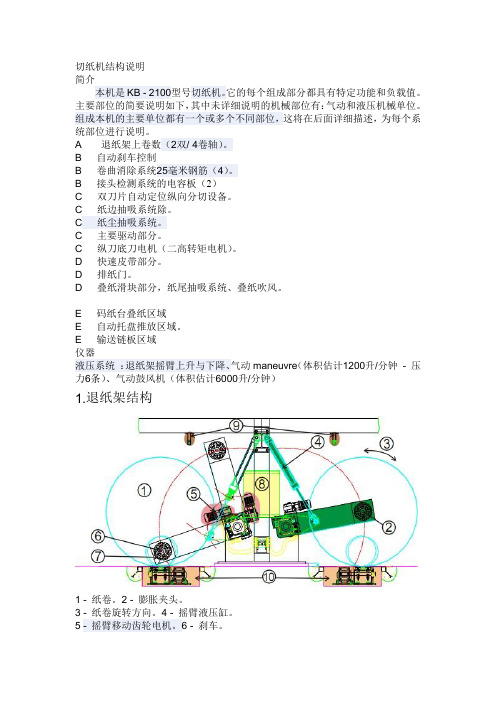
E 输送链板区域仪器液压系统:退纸架摇臂上升与下降、气动maneuvre(体积估计1200升/分钟- 压力6条)、气动鼓风机(体积估计6000升/分钟)1.退纸架结构1 - 纸卷。
2 - 膨胀夹头。
3 - 纸卷旋转方向。
4 - 摇臂液压缸。
5 - 摇臂移动齿轮电机。
6 - 刹车。
7 - 制动电机风扇。
8 - 操作盘。
9 - 安全限位器。
10 - 纸卷输送带。
该机有四组摇臂,将要分切的纸卷装好后抬起通常称为上卷。
每组摇臂有两个膨胀夹头(通过气压进行工作)可使用的纸芯尺寸分别为3寸、6寸、12寸。
每组摇臂可同时上升或下降、水平移动,上升下降是由一组液压缸控制进行动作,摇臂上方装有限位光电管限制纸卷上升的最大高度。
水平移动是由一组摇臂上的两台减速电机进行移动的。
在控制摇臂时,每个摇臂上都有相应的控制盘控制摇臂动作,每组摇臂都有一个纸卷输送小车用于将纸卷送至两个摇臂中间进行上卷。
2. 校正辊该辊可水平移动,通过旋转螺杆来调整纸幅的均衡度,并且可以调整因纸幅张力不均或者打折现象。
3.卷曲消除系统每组卷取消除棒由25mm直径的镀铬钢材组成,纸幅从卷曲棒上穿过,上下移动卷曲棒达到对纸幅卷曲的消除。
在开机前先检查卷曲棒是否打回原位,使用卷曲棒根据所分切纸卷直径和张力大小对卷曲棒进行操作,来达到分切纸幅的正常运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械式切纸机设计说明书作者姓名段大川专业机械设计制造及其及自动化指导教师姓名魏高峰专业技术职务教授目录摘要 (4)第一章绪论 (6)1.1切纸机简介 (6)1.2国内外研究现状 (7)1.3题目选取 (8)1.4机械式切纸机的特点 (8)1.5设计的要求 (8)第二章切断机整体装置设计 (8)2.1传动装置总体设计 (8)2.2电机的选用 (8)2.3传动装置各运动参数和动力参数 (10)2.3.1总传动比的确定及各级传动比的分配 (10)2.3.2传动装置运动和动力参数计算 (10)2.4带传动的设计 (11)2.5齿轮传动的设计 (13)2.5.1低速级齿轮传动设计 (13)2.5.2高速级齿轮设计 (17)2.6轴的设计 (21)2.6.1低速轴设计 (21)2.6.2中间轴设计 (23)2.6.3高速轴的设计 (24)2.6.4轴的校核 (24)2.7钢筋切断机的摩擦、磨损和润滑 (28)2.8丝杠选取和设计 (28)2.9手轮的设计 (29)第三章结论 (29)参考文献 (30)摘要本课题设计造纸行业的机械式切纸机的工作原理是:采用电动机经带传动减速后,带动偏心轮旋转,偏心轮推动连杆使滑块和刀片实现切纸的往复运动,通过气缸的气压带动压纸器实现压纸、手轮的旋转带动丝杠的运动从而实现了推纸板的运动,调节切纸的尺寸。
根据电机的工作环境选择电动机类型,采用立式安装,防护式电机,鼠笼式三相异步电动机。
选择带传动,它具有缓冲、吸振、运行平稳、噪声小、合过载保护等优点,并安装张紧轮。
切纸动力由电动机输出,通过减速系统传动,把动力输入到执行机构。
压制动力由气缸提供,通过连杆带动压纸板的运动。
推纸机构的运动是通过手动的手轮带动丝杠的旋转从而实现运动的。
关键词切纸压纸推纸偏心轮ABSTRACTThis topic in papermaking industry design of mechanical cutters work principle is: by using motor slowdown driven belt, promote, connecting eccentric eccentric to slide and realize the cutter blades, through the cylinder reciprocating motion of the pneumatic drive paper realize paper, ball screw rotation handwheel drives the movement realizes the push of exercise, adjust the cardboard cutter size.According to the motor working environment and the vertical motor type selection, installation, protective motor mouse cage three-phase asynchronous motor. Choose belt transmission, it has the buffer, vibration, low noise, smooth operation, overload protection, and install a wheel. Driven by motor output cutter, through the force transmission system, the input to the actuator. By pressing power cylinder rods, through the movement. Drive pressure cardboard, Push the movement of the handwheel is driven by manual ball screw rotation so as to realize the movement. Keywords paper cut ;Paperweights ;paper driving unit ;eccentric第一章绪论1.1切纸机简介切纸机是一种常用的纸张加工设备,其应用于生产已有上百年的历史。
它主要用于造纸厂单张纸的裁切切纸机有较好的市场前景,主要表现在以下几点。
第一,印刷厂现配备的切纸机,大都是在印刷业大发展的八、九十年代购入,那时国产的切纸机主要是机械式的。
存在的问题有,一是没有高精度的尺寸定位系统和尺寸设置装置,精度低,不能满足高档印品裁切的要求;二是机械式切纸机冲击力大、噪音大、安全机构不可靠,容易出工伤事故;三是自动化水平低,没有加工、印刷企业印前单张纸裁切和印后印刷品的整形加工以及包装产品中纸蜂窝芯的切制。
近年来,切纸机又广泛应用于商标、不干胶贴片、卡片、甚至PS版、皮革、硬塑料等非纸材料的裁切。
在印刷机械产品家族中,切纸机占有重要的地位,年销售量仅次于小型平版印刷机。
随着社会经济的发展和科技的进步,切纸机的社会需求量不断增加,其自身的高科技含量也大幅提升。
1.2国内外研究现状国内制造切纸机的厂家约34家。
主要企业有上海申威达、长春印机、四川中江、甘肃平凉普业、山东荷泽生建、浙江嘉路等切纸机厂。
2001年十家切纸机厂统计,共销售切纸机2703台,完成销售额2.84亿元,2002年七家企业统计,共销售切纸机2484台,完成销售额2.18亿元。
主要切纸机规格有420mm、580mm、650mm、760mm、780mm、920mm、1150mm、 1250mm、I300mm、1370mm、1550mm、1660mm、1860mm、2200mm等14种规格。
上海申威达公司飞达牌系列切纸机和四川中江利通公司的利通牌系列切纸机,代表了国产切纸机的发展水平。
这两家企业已经不再生产落后的机械式切纸机,而以液压切纸机、程控切纸机和微机程控切纸机作为现阶段主流产品。
申威达飞达牌系列切纸机,通过微机处理及位置检测装置进行程序控制,是集机、电、光、液、气与数字技术为一体的机电一体化产品。
其主要特点包括:采用模块化设计,零部件标准化、设计通用化;压纸器采用液压驱动实现无级调压,压力大而恒定;采用Internet网络技术、中英文选择的人机对话界面,实现远程故障监控和诊断;采用PLC进行控制,RS485接口进行通讯;当系统出现故障报警时,系统自动弹出故障名和建议处理方式;利用先进的滚珠丝杆和线性导轨结构使推纸器运行平稳、轻快,定位准确,噪声低,提高了裁切精度;工作台全部镀铬并附带气垫,使工作台耐磨,不生锈,推纸轻快;在安全防护方面,有双手连动保护按钮,红外线光电保护及电子锁等安全防护装置,从而保障了操作人员和设备的安全;可循环单次裁切,裁切时具有过载保护功能,换刀轻捷方便。
四川中江利通公司的利通牌系列切纸机也有多项改进。
“双导轨整体无槽工作台”利用台下两侧面的两根导轨进行导向,提高了工作台的刚性,使推纸器冲撞后位移量<0.05mm,精度远高于行业标准,使切纸机推纸器的抗冲撞能力和稳定性得到很大提高;“平衡式压纸机构”采用了配重式平衡结构新技术,压纸器在全行程内压力均衡稳定,运行平稳,性能可靠,并率先在国内达到了欧洲标准要求的压纸器压纸压力不得超过300牛顿的技术指标;“无间隙电磁离合制动器”具有强大而恒定的吸合力、制动力和恒定的输出推力,能保证离合机构适中工作在最佳工作状态,减少了磨损和维护,功耗低,裁切力大,响应速度快,制动迅速,达到了国际标准。
国际上众多先进的切纸机中最著名的当数Polar切纸机,它代表了切纸机的发展方向。
包括法国的沃伦贝格(WOHLENBERG)、施耐德(SCHNEIDER)、英国的凯琳琪(CHELLENGE)、日本的伊藤(ITON)等其他品牌切纸机也各有千秋。
这里以Polar公司的机型为代表说明国外切纸机的发展历程。
最早的切纸机是机械式切纸机,它采用单导轨结构,结构简单,调试维修方便,但是这类切纸机没有高精度的尺寸定位系统和尺寸设置装置,裁切精度低,不能满足高档印刷品裁切的要求。
另外这种切纸机冲击力大、噪音大、安全机构不可靠,容易出现工伤事故,而且没有自动送纸机构,劳动强度大,生产效率低下。
该机型现已被淘汰。
机械式切纸机之后,人们将液压机构引入切纸机设计出了液压式切纸机。
采用液压驱动的压纸器,压力大而恒定,受裁切时冲击力的干扰小,有的切纸机的裁刀也使用液压驱动,裁切准确而稳定。
随着控制论和电子技术的发展,数显和程控式液压切纸机开始成为切纸机的发展主流。
1956年波拉公司生产出了第一台磁带控制的切纸机,开辟了程控切纸机的设计先河。
自1997年开始,德国Polar公司在国际性展览会上几乎每次都有新机型参展。
1.3题目选取本次毕业设计的任务是设计一台机械式切纸机。
任务要求切纸的尺寸为宽和长都为20-650mm最厚80mm,切断速度为30次/分。
在设计中通过计算和考虑实际情况选则合适的结构及参数,从而达到设计要求,同时尽可能的降低成本,这也是一个综合运用所学专业知识的过程。
毕业设计是对四年大学所学知识的一个总结,也是走上工作岗位前的一次模拟训练。
1.4机械式切纸机的特点机械式切纸机能够实现自动切纸的功能,具有切纸精度高、可以对大量的纸进行同时裁切,裁切的精度也比较高。
这种切纸机比较小巧,既方便使用也不会占用太大的地方,价格根据裁切幅面的大小以及机器的配置而定的。
切纸机的结构相对复杂,主要由主机、工作台、压纸机构、推纸机构和裁切机构组成。
这种切纸机主要适用于对大量的文件装订之前将纸切整齐。
这种切纸机广泛应用于现代数码快印、中高档办公、图书馆、国家公务机构和中小型印刷等。
从推纸机构乃至裁切机构的驱动方式上又分为手动切纸机(纯机械结构)、电动切纸机;从压纸机构的驱动方式上又分为机械压纸和液压压纸1.5设计的要求机器的种类虽然很多,但设计时的基本要求往往是共同的,根据对现有机器的分析,现代机器的设计应满足下列两大要求:一、经济性要求机器的经济性必须体现并贯穿在其设计、制造和使用的全过程中。
体现在设计阶段是指应用先进的设计方法,将三钟传动(机械、电子、液压)有机地匹配,各得其所。
此外尽量采用标准件、通用件和使用产品系列化而缩短设计周期;体现在制造过程中是指使用无切削加工等各种新的制造工艺技术,提高工效、缩短制造周期等;体现在使用方面是指消耗(水、电、油及辅助材料等)少、管理和维修费用低等。
二、社会要求机器应有好的社会效果,表现为;应满足人机工程学的要求,如操作方便、省力、舒适劳动强度低、维修简捷等;应符合安全运行要求,如设置可靠的安全防护装置,设置能排除误操作的连锁装置,采用安全联轴器和离合器,配备各类预警信号装置等;应满足工艺美术要求,如造型精巧、线形流畅、形体简练、色彩明快等;应符合环保要求,如控制噪声、有效地排除废气、废液等,以免造成环境污染。