本特利传感器介绍
本特利bently电涡流传感器工作原理

本特利bently电涡流传感器工作原理本特利bently电涡流传感器工作原理一、本特利bently电涡流传感器常用分类我们常接触到的本特利bently涡流传感器有直径5mm涡流传感器、8mm涡流传感器、11mm涡流传感器、14mm涡流传感器、25mm涡流传感器、50mm差胀传感器、3300耐高温电涡流传感器几种,其中5mm探头和14mm探头不常用。
每个传感器系统都由探头、延长线和前置器组成,本特利探头、延长线和前置器具有完全的可互换性,只要部件号一致,各部分可以互换。
二、本特利bently电涡流传感器工作原理电涡流传感器是以高频电涡流效应为原理的非接触式位移、振动传感器,其基本原理是探头、延伸电缆、前置器以及被测体构成基本工作系统。
前置器中高频振荡电流通过延伸电缆流入探头线圈,在探头头部的线圈中产生交变的磁场。
如果在这一交变磁场的有效范围内没有金属材料靠近,则这一磁场能量会全部损失;当有被测金属体靠近这一磁场,则在此金属表面产生感应电流,电磁学上称之为电涡流。
与此同时该电涡流场也产生一个方向与头部线圈方向相反的交变磁场,由于其反作用,使头部线圈高频电流的幅度和相位得到改变(线圈的有效阻抗),这一变化与金属体磁导率、电导率、线圈的几何形状、几何尺寸、电流频率以及头部线圈到金属导体表面的距离等参数有关。
通常假定金属导体材质均匀且性能是线性和各项同性,则线圈和金属导体系统的物理性质可由金属导体的电导率б、磁导率ξ、尺寸因子τ、头部体线圈与金属导体表面的距离D、电流强度I和频率ω参数来描述。
则线圈特征阻抗可用Z=F(τ, ξ, б, D, I, ω)函数来表示。
通常我们能做到控制τ, ξ, б, I, ω这几个参数在一定范围内不变,则线圈的特征阻抗Z就成为距离D的单值函数,虽然它整个函数是一非线性的,其函数特征为S型曲线,但可以选取它近似为线性的一段。
本特利轴向位移探头型号

本特利轴向位移探头说明3300 XL 11mm 电涡流传感器系统对于油膜轴承机器非接触式振动和位移测量,3300 XL 11mm电涡流传感器系统可输出3.94 V/mm(100mV/mil)。
11mm的探头端部使这种传感器与我们标准的3300 XL8mm传感器系统相比具有更大的线性区。
它主要应用在要求大线性范围的下列测量:轴向(推力)位移测量蒸汽轮机的斜面差胀测量往复式压缩机活塞杆位移或下降的测量转速计和零转速测量相位参考(键相位)信号330701 3300 XL 11mm探头,1/2-20 UNF螺纹,非铠装330702 3300 XL 11mm探头,1/2-20 UNF螺纹,铠装330707 3300 XL 11mm探头,5/8-18 UNF螺纹,非铠装本特利(Bently Nevada)330707-05-35-10-02-00本特利(Bently Nevada)330707-00-62-10-01-00本特利(Bently Nevada)330707-00-20-10-02-00330708 3300 XL 11mm探头,5/8-18 UNF螺纹,铠装3300 XL 11mm 电涡流探头,公制330703 3300 XL 11mm探头,M14×1.5螺纹,非铠装本特利(Bently Nevada)330703-000-040-50-11-00本特利(Bently Nevada)330703-000-040-10-02-00本特利(Bently Nevada)330703-000-050-10-02-00本特利(Bently Nevada)330703-000-050-50-02-00本特利(Bently Nevada)330703-000-060-10-02-00本特利(Bently Nevada)330703-000-060-90-02-00本特利(Bently Nevada)330703-000-064-90-02-00本特利(Bently Nevada)330703-000-070-10-02-00本特利(Bently Nevada)330703-000-080-10-02-00本特利(Bently Nevada)330703-000-090-10-02-00本特利(Bently Nevada)330703-000-100-10-02-00本特利(Bently Nevada)330703-000-120-10-02-00本特利(Bently Nevada)330703-050-120-10-02-00330704 3300 XL 11mm探头,M14×1.5螺纹,铠装本特利(Bently Nevada)330704-000-100-10-11-00本特利(Bently Nevada)330704-000-040-10-02-00本特利(Bently Nevada)330704-000-050-10-01-05本特利(Bently Nevada)330704-000-050-10-02-00本特利(Bently Nevada)330704-000-060-10-02-00本特利(Bently Nevada)330704-000-060-90-02-00本特利(Bently Nevada)330704-000-080-10-02-00本特利(Bently Nevada)330704-000-080-50-02-00330709 3300 XL 11mm探头,M16×1.5螺纹,非铠装本特利(Bently Nevada)330709-000-030-10-02-00本特利(Bently Nevada)330709-000-040-10-02-00本特利(Bently Nevada)330709-000-040-50-02-05本特利(Bently Nevada)330709-000-050-10-02-00本特利(Bently Nevada)330709-000-060-10-02-00本特利(Bently Nevada)330709-000-060-50-02-00本特利(Bently Nevada)330709-000-060-90-02-00本特利(Bently Nevada)330709-000-070-10-02-00本特利(Bently Nevada)330709-000-080-10-02-00本特利(Bently Nevada)330709-000-120-10-02-00本特利(Bently Nevada)330709-010-070-10-02-00本特利(Bently Nevada)330709-010-130-10-02-00本特利(Bently Nevada)330709-050-120-10-02-00330710 3300 XL 11mm探头,M16×1.5螺纹,铠装本特利(Bently Nevada)330710-000-040-10-11-00本特利(Bently Nevada)330710-000-050-10-02-00本特利(Bently Nevada)330710-000-060-10-02-00本特利(Bently Nevada)330710-050-124-10-02-00本特利(Bently Nevada)330710-050-124-90-02-003300 XL 11mm 反装探头330705-02-18-CXX-DXX-EXX,3/8-24 UNF螺纹本特利(Bently Nevada)330705-02-18-10-02-00本特利(Bently Nevada)330705-02-18-90-02-00本特利(Bently Nevada)330705-02-18-90-02-05330706-005-046-CXX-DXX-EXX,M10×1螺纹本特利(Bently Nevada)330706-005-046-10-02-00本特利(Bently Nevada)330706-005-046-10-02-053300 XL 11mm前置器本特利(Bently Nevada)330780-50-00本特利(Bently Nevada)330780-50-05本特利(Bently Nevada)330780-51-00本特利(Bently Nevada)330780-90-00本特利(Bently Nevada)330780-91-00本特利(Bently Nevada)330780-91-053300 XL 11mm 延伸电缆本特利(Bently Nevada)330730-040-00-00本特利(Bently Nevada)330730-040-01-00本特利(Bently Nevada)330730-040-03-00本特利(Bently Nevada)330730-040-12-00本特利(Bently Nevada)330730-040-13-00本特利(Bently Nevada)330730-080-00-00本特利(Bently Nevada)330730-080-01-00本特利(Bently Nevada)330730-080-02-00本特利(Bently Nevada)330730-080-11-00本特利(Bently Nevada)330730-080-12-00本特利系统主要是对大型旋转设备的振动检测,测量转子和机壳的振动、速度、加速度和位移。
本特利传感器330500资料

BENTLY NEVADA
MADE IN U.S.A.
R
VELOMITOR PN 330500
100 mV/in/s (4 mV/mm/s)
R
技术规格
如无特别说明,所有参数均在+25±5°C (+77±9°F)下确定。.
注: 在规范限以外操作将导致读数错误或失去监测作用。
电气特性
灵敏度: 频率响应:
抗冲击能力:
最大 24,517 m/s (2500 g) 峰值 100%不浸入水中; 壳体密闭式密封。
2
相对湿度:
物理特性
重量: 直径: 高度:
典型值 150g(5.3 oz) 25.3 mm (0.995 in) 66 mm (2.6 in) 316L 不锈钢 2 针 Mil-C-5015 密闭式密封, 304 不锈钢外壳 最大 46 kg cm (40 in-lb) 当传感器壳体的运动方向对着接 头时,A 针相对于 B 针为正极。
161191
电缆部件号- 电缆长度选项,单位为英尺: 订货时以 1.0 英尺(0.3 米)递 增。 XXXXX - AXX 例如: 0 9 = 9 英尺(2.74 米) 1 2 = 12 英尺(3.66 米) 1012122-01
Velomitor® 传感器接头组件。 用于有防护箱和改型的情况下。 速度计电源模块
注: 当要求安装防护箱时,安装螺纹 选项 01——1/2 - 20 UNF 螺纹与我们 的 21128 速度传感器防护箱配套使 用。
B: 批准机构选项
0 0 0 1
不要求 CSA/NRTL/C CENELEC 多种许可
环境限制
0 2 0 4 −55°C 到 +121°C (−67°F 到 +250°F)
本特利探头说明书
80 V/mm (2 V/mil) 系统:
80 V/mm (2 V/mil) ± 5.6% ,包括互换性误差,当 在 200 µm (16 mil)线性范围 内以 25 µm (1 mil)的增量测 量时
线性偏差 (DSL)
40 V/mm (1 V/mil) 系统:
从最佳拟合直线的偏差小于 ±6.4 µm (±0.25 mil)
前置器 .13mm 0.0381 0.0010 0.0010 0.0584 (5 mil) (0.0015) (0.0004) (0.0004) (0.0023) .33mm 0.1219 0.0356 0.0356 0.1168 (13mil) (0.0048) (0.0014) (0.0014) (0.0046) .53mm 0.2743 0.1143 0.1143 0.2616 (21mil) (0.0108) (0.0045) (0.0045) (0.0103)
使用 3300 REBAM® 传感器系统不需要扩孔,从而使侧视影响大 为减少,当无需扩孔时平均灵敏度变化小于 5%( 对于攻出 3/824 或 M10 x 1 内螺纹的孔保持有效)
一个双通道监测器和一个便携式现场仪表可以连接到 3300 REBAM®传感器系统。3300/54 双通道 REBAM®监测器 为机器提供 所需要的连续关键保护。
注:用户有责任保证使传感器在无液体或气体泄漏的环 境下安全地工作。另外,过高或过低 pH 值的液体将会 腐蚀探头的端部组件,引起介质泄漏到探头内部。本特 利内华达公司不对由于上述原因引起的电涡流探头的损 坏负任何责任。 由于泄漏损坏的 3300 XL 电涡流探头将 不享受承诺的质量服务。
专利号: 5,016,343 和 5,126,664
本特利电涡流传感器工作原理、安装及常见故障总结处理
引言在笔者所在单位大空分空气透平压缩机、天然气转化制甲醇合成气压缩机,低密度聚乙烯循环气压缩机等大型旋转机械上都使用本特利电涡流传感器来测量压缩机的轴的位移、振动及转速等,本文说明了电涡流传感器的构成及工作原理,介绍其在大型旋转机械设备监测中的应用、安装方法并总结常见故障。
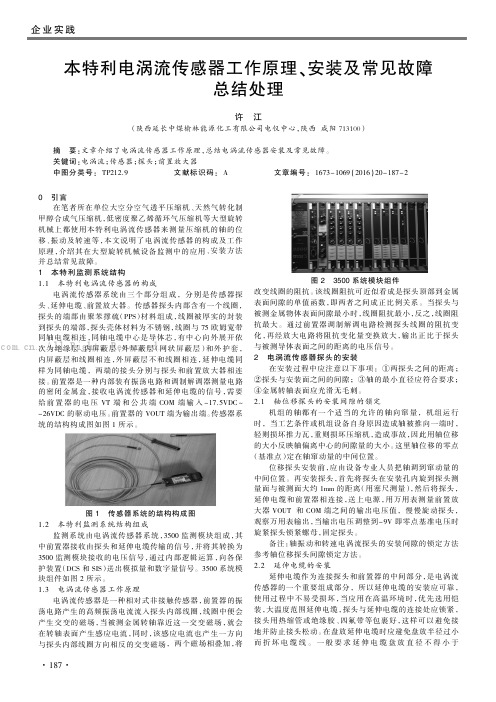
1本特利监测系统结构1.1本特利电涡流传感器的构成电涡流传感器系统由三个部分组成,分别是传感器探头、延伸电缆、前置放大器。
传感器探头内部含有一个线圈,探头的端部由聚苯撑硫(PPS )材料组成,线圈被厚实的封装到探头的端部,探头壳体材料为不锈钢,线圈与75欧姆宽带同轴电缆相连,同轴电缆中心是导体芯,有中心向外展开依次为绝缘层、内屏蔽层、外屏蔽层(网状屏蔽层)和外护套,内屏蔽层和线圈相连,外屏蔽层不和线圈相连,延伸电缆同样为同轴电缆,两端的接头分别与探头和前置放大器相连接。
前置器是一种内部装有振荡电路和调制解调器测量电路的密闭金属盒,接收电涡流传感器和延伸电缆的信号,需要给前置器的电压VT 端和公共端COM 端输入-17.5VDC ~-26VDC 的驱动电压。
前置器的VOUT 端为输出端。
传感器系统的结构构成图如图1所示。
图1传感器系统的结构构成图1.2本特利监测系统结构组成监测系统由电涡流传感器系统,3500监测模块组成,其中前置器接收由探头和延伸电缆传输的信号,并将其转换为3500监测模块接收的电压信号,通过内部逻辑运算,向各保护装置(DCS 和SIS )送出模拟量和数字量信号。
3500系统模块组件如图2所示。
1.3电涡流传感器工作原理电涡流传感器是一种相对式非接触传感器,前置器的振荡电路产生的高频振荡电流流入探头内部线圈,线圈中便会产生交变的磁场,当被测金属转轴靠近这一交变磁场,就会在转轴表面产生感应电流,同时,该感应电流也产生一方向与探头内部线圈方向相反的交变磁场,两个磁场相叠加,将改变线圈的阻抗。
该线圈阻抗可近似看成是探头顶部到金属表面间隙的单值函数,即两者之间成正比例关系。
美国BENTLY本特利速度传感器

美国BENTLY本特利速度传感器广州南创陈工美国BENTL Y(本特利),本特利(美国BENTL Y)在评估和确保工业设备的机械和热力学性能方面是全球领先的产品和服务供应商。
公司在全球43个国家的主要工业中心设有100个办事处。
BENTLY传感器的产品远销38个国家,在多个国家设立了分支机构或办事处,生产基地遍布美洲、东欧、中国等地;并在中国设立了广州南创传感器事业部,可为用户的实验和生产提供最佳的服务与解决方案。
其全球用户超过二万五千,分布于发电、石化以及其它众多行业是世界领先的产品和服务供应商,提供工业用机器及其它资产的机械学和热力学状态信息。
拥有全球最大的机械保护和连续状态监测系统安装容量,所提供的解决方案是有效的工厂资产管理策略的重要组成部分。
四十年来,一直致力于帮助用户保护和管理他们的机械。
本特利(美国BENTL Y)不但是仪表制造公司,还是世界闻名的机械专家。
在二十余年的研发工作中,积累了与转子动力学相关的丰富知识,掌握了排除故障、解决问题的专业技能,提供了上万次现场机械故障诊断服务。
如今,已经超越了旋转和往复机械——解决方案可以应用于任何工厂设备资产。
在各项衡量用户满意度的指标中,常盛不衰是最有说服力的。
当旧系统需要改造或者在状态监测项目中需要增加新资产时,是什么使用户仍然选择本特利内华达(美国BENTLY)是所取得的成效。
本特利内华达(美国BENTLY)的解决方案使用户的设备资产运行更安全、更高效、更可靠,为用户带来他们所期望的经济收益。
传感器包括振动、位移、转速、压力、能量、温度等种类。
产品特性描述:BENTL Y 9200速度传感器Seismoprobe速度传感器系统测量轴承箱、机壳或结构的绝对(相对于自由空间)振动,该两线系统由传感器、电缆和可选的速度-位移转换器组成。
对于大多数应用,BENTL Y 9200速度传感器的Velomitor系列速度传感器包含了固体技术,在机壳速度测量中性能高好,结构更加坚固。
内华达本特利传感器介绍V

内华达本特利传感器介绍V内华达本特利传感器(Nevada Benteli Sensor)是一家致力于传感器研发制造的技术公司,总部位于美国内华达州。
该公司成立于1990年,专注于开发和生产各种高性能传感器以满足不同领域的需求。
本特利传感器以其优良的质量、可靠性和创新性而闻名,被广泛应用于工业自动化、汽车、医疗设备、航空航天等领域。
1.光电传感器:本特利传感器的光电传感器具有高精度、高灵敏度和高稳定性的特点。
它们可以用于检测、测量和控制光信号,广泛应用于自动化生产线、机器人技术、安全监控系统等领域。
2.压力传感器:本特利传感器的压力传感器采用先进的压力测量技术,能够准确地感知压力变化并将其转换为电信号。
这些传感器广泛应用于汽车发动机控制、制造业、医疗设备等领域。
3.温度传感器:本特利传感器的温度传感器具有高精度和高稳定性,能够准确地测量温度变化并将其转换为电信号。
它们广泛应用于空调、冰箱、汽车、工业加热设备等领域。
4.流量传感器:本特利传感器的流量传感器适用于各种液体和气体的流量测量。
它们具有高精度、高可靠性和高灵敏度的特点,可以用于工业过程控制、液体计量、测量仪器等领域。
除了以上几种传感器,内华达本特利传感器还生产并提供其他类型的传感器,如声音传感器、振动传感器、位置传感器等。
这些传感器在各种应用中发挥着重要的作用,帮助提高生产效率、降低能耗、改善产品质量等。
为了保证产品的质量和可靠性,内华达本特利传感器拥有一支专业的研发团队和一套完善的质量管理体系。
公司不断进行技术创新和产品改进,以满足客户的需求,并在全球范围内建立了广泛的销售和服务网络。
总而言之,内华达本特利传感器是一家在传感器领域具有丰富经验和专业知识的公司,提供各种高性能的传感器产品。
它们的产品被广泛应用于汽车、工业自动化、医疗设备等众多领域,为客户提供了科技创新和高效率的解决方案。
本特利振动探头原理

本特利振动探头原理引言:本特利振动探头是一种常用的实验仪器,用于研究物体的振动特性。
它基于本特利原理,通过测量物体的振动频率和振动幅度,可以得到物体的振动特性参数。
本文将详细介绍本特利振动探头的原理和工作方式。
一、本特利原理本特利原理是指当一个物体在振动时,会产生特定频率的声音。
这是因为振动会引起周围空气的压力变化,从而产生声波。
根据本特利原理,我们可以通过测量声波的频率和振幅来了解物体的振动情况。
二、本特利振动探头的结构本特利振动探头由振动传感器和信号处理器组成。
振动传感器通常采用压电陶瓷材料,它可以将物体的振动转化为电信号。
信号处理器则负责对传感器采集到的信号进行放大、滤波和数字化处理。
三、本特利振动探头的工作原理当本特利振动探头靠近一个振动的物体时,振动传感器会受到物体的振动力的作用,产生相应的电信号。
这个电信号经过放大、滤波和数字化处理后,转化为振动的频率和振幅信息。
四、本特利振动探头的应用本特利振动探头广泛应用于机械工程、材料科学和生物医学等领域。
例如,在机械工程中,可以利用本特利振动探头来分析机械设备的振动状况,从而判断设备是否存在故障或磨损。
在材料科学中,可以使用本特利振动探头来研究材料的振动特性,评估材料的质量和性能。
在生物医学中,本特利振动探头可以用来检测人体的生理信号,如心跳和呼吸等。
五、本特利振动探头的优势和局限性本特利振动探头具有以下优势:1. 非接触式测量:本特利振动探头可以远距离测量物体的振动,无需接触被测物体,避免了对物体的干扰。
2. 高灵敏度:本特利振动探头可以测量微小振动,具有较高的灵敏度。
3. 宽频率范围:本特利振动探头可以测量从几十赫兹到几百千赫兹的频率范围。
然而,本特利振动探头也存在一些局限性:1. 受环境干扰:本特利振动探头对周围环境的噪声和干扰较为敏感,需要在实验过程中进行噪声抑制和滤波处理。
2. 有限测量距离:本特利振动探头的测量距离有限,通常在几米到几十米之间。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于安装
传感器安装位置 • 测轴位移的传感器应尽可能靠近推力 轴承 • 测径向振动的传感器
– 安装在同一轴向平面内 – 两个传感器正交分布
考虑安装空间的限制
保证测量精度
加速度传感器 • 安 装 点 清 理 油 漆、 异 物 • 安装点保证一定的平面度 键相位传感器 • 每 个 转 速 或 旋 转 方 向 不 同 的 轴, 都 应 安装一个键相位传感器
or
= 7.87 mV/um
组成元件不匹配的影响
24 22 20
SHORT
18
OUTPUT (-Vdc) (
16 14 12 10 8 6 4 2 0 0 10 20 30 40
CORRECT
LONG
50
60
70
80
90
100 110 120 130 140
PROBE GAP (mils)
输入电压的影响
Velomitor 的 频 率 响 应
Velomitor 的 特 点
优点 • 安装简便 • 良好的中频响应 • 长时间使用可靠性好 • 使用温度范围宽
Velomitor 的 特 点
缺点 • 校验需要振动台 • 需要连续供电 • 低频响应差
加速度传感器 (Accelerometer)
加速度传感器的结构
<100mil
线性范围
RF SIGNAL
趋近传感器系统 - Eddie Current
导电材料
RF 信 号
电涡流
趋近传感器系统– Gap Signal 近传感器系统
RF SIGNAL
0
RF SIGNAL
0
RF SIGNAL
0
趋近传感器系统– Prox Output 近传感器系统
RF SIGNAL 0
Proximitor ®传感器系统选型 (Probe) 传感器系统选型
330103(直径/铠装/螺纹规格)-A(无螺纹长度)XX-B(探头长度)XX-C( 总长度)XX-D(接头)XX-EXX
Proximitor ®传感器系统选型 传感器系统选型 (Extension Cable)
330130-A(长度)XXX-B(接头)XX-CXX
DEMODULATOR INPUT
0
PROXIMITOR OUTPUT
0
趋近传感器系统– Measurements 近传感器系统
X Y Probe Application
径向运动
Thrust Application
轴向运动
涡 流 探 头 用 为 Keyphasor®
NOTCH
3300XL系列
3300XL 8mm
传感器的命名和安装角度
机组观察点
机组图举例
传感器标识
Velomitor振动速度传感器
比 例 因 数(Scale factor)
趋近式传感器系统采用比例因数来将系 统 输 出 转 换 成 位 移 值。 趋近式系统在一个很宽的位移范围内保 证 比 例 因 数 不 变。 在 系 统 线 性 范 围 内, 才 能 用 比 例 因 数 计 算 位 移 值。 计 算 公 式: • 位 移= 电 压 变 化/ 比 例 因 数
加速度传感器 (Accelerometer)
惯性参考质量 为参考质量 弹簧系统包括 预紧螺钉和压 电盘
加速度传感器的频率响应
加速度传感器特点
优 点: • 在 轴 承 箱 上 安 装, 简 便 • 频率响应范围宽 • 长时间使用可靠性好 • 使用温度范围宽
加速度传感器特点
缺 点: •校 准 需 要 振 动 台 • 对安装方法和被测表面状况敏感 • 频 率 响 应 范 围 宽, 也 意 味 者 容 易 引 入 噪 声 信 号, 通 常 信 号 需 要 滤 波 • 不能直接测量轴的振动 • 没有慢转动信息
• 3300 XL 8mm探头、延长电缆、前置放大器 • 与non-XL 3300系列兼容和互换 • 径向振动、轴位移、转速和 keyphasor • 频率响应 0 to 10 kHz • 线性范围 2 mm (80 mils), 0.25 to 2.3 mm (10 to 90 mils) (approximately –1 to –17 Vdc). • 灵敏度(SF) 7.87 V/mm (200 mV/mil) • 1M / 5M / 9M 系统
本特利传感器系统
三种类型的传感器
涡流式趋近式传感器 速 度 计(Velomitor) 速 度 传 感 器 加速度传感器
趋近式传感器
趋 近 式 传 感 器(proximity) 系 统 组 成
趋近式传感器工作原理
当探头顶部的线圈加上高频电流并与一 导 电 表 面 靠 近 时, 由 于 线 圈 磁 力 线 的 作 用, 使 导 电 物 体 表 面 产 生 涡 流, 从 而 使 线 圈 的 电 感 量 减 小。线 圈 特 性 的 这 个 变 化 被 转 换 为 直 流 电 压 信 号 输 出。
趋近式传感器系统
线 性 范 围(Linear
Range)
决定系统输出的因素 ( 探 头 和 被 测 表 面 距 离 不 变)
线圈频率 被测表面导电性 被测表面导磁性
趋近式传感器特点
优 点: • 可以测量轴的振动和位置 • 非接触的直接测量轴的运动 • 提供转速和键相位参考信号 • 长时间使用可靠性高 • 提供慢转动信息 • 校验简单
三种传感器关系
振动加速度传感器信号(mm/s2)
积 分
速度传感器信号(mm/s) mm/s) 积
分
传感器信号(um) 90
基于信号频率
振动传感器的频率响应 • 根据振动信号的频率选择合适频率响 应范围的传感器 测量需保证足够的信噪比
环境因素
两个最重要的环境因素为温度和 振动水 平 其它需考虑的环境因素 • • • • 腐蚀 湿度 压力 辐射水平
OUTPUT (-Vdc) (
16 14 12 10 8 6 4 2 0 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140
4140 STEEL TUNGSTEN ALUMINUM COPPER
PROBE GAP (mils)
振动传感器方向约定
来自BNC术语表:
传感器系统_ 传感器系统 Proximitor® Probe
安装 5mm & XL8mm
最小靶面面积
边界尺寸
探头互扰
探头之间的串扰
Mount Probe
侧边间隙过小的影响
靶面尺寸的影响
YES
NO
涡流传感器系统的 性能校验
校验图
24 22 20 18 OUTPUT (- Vdc) 16 14 12 10 8 6 4 2 0 0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 PROBE GAP (m感器系统 近传感器系统
三部分组成: 三部分组成 • 探头 • 延长电缆 •前置器 前置器
Proximitor
®
Extension Cable
Probes
Mounting Bases
趋近传感器系统 - Proximitor 近传感器系统
电长度: 电长度: 探头电缆 + 延长电缆 = 信号输出端子 整个系统电长度 信号公共端 电长度必须和前置器 名牌电长度匹配 供电端子
Proximitor ®传感器系统选型 (Sensor) 传感器系统选型
DIN 安装部 件 (part number 138493-01) 前置器 330180-A(长度 长度 5m/9m)XX-BXX Panel 安装部 件 (part number 138492-01)
Proximitor ® Sensor 安装
速 度 计 速 度 传 感 器Velomitor
Velomitor 结 构
速 度 计 速 度 传 感 器Velomitor
工作原理 • 传 感 器 承 受 振 动 时, 压 电 盘 受 力 产 生 的 电 荷 与 振 动 的 加 速 度 成 正 比。 •压 电 盘 产 生 的 信 号 在 传 感 器 内 部 经 过 积分以振动速度的形式输出
3300XL系列
3300XL NSv
• 3300 XL NSv探头、延长电缆、前置放大器 • 与non-XL 3300系列兼容和互换 • 径向振动、轴位移、转速和 keyphasor • 频率响应 0 to 10 kHz • 线性范围 1.5 mm (60 mils), 0.25 to 1.75 mm (10 to 70 mils) (approximately –1 to –13 Vdc). • 灵敏度(SF) 7.87 V/mm (200 mV/mil) • 5M / 7M 系统
趋近式传感器特点
缺点 • 对被测材料性质敏感 • 对被测物表面状况敏感 • 安 装 较 为 复 杂, 可 能 需 要 在 机 壳 上 钻 孔
趋 近 式 传 感 器 频 率 响应
速 度 计 速 度 传 感 器Velomitor
Velomitor 实 际 上 是 一 种 内 置 信 号 放 大 和 积 分部件的加速度传感器 Velomitor内 部 没 有 运 动 的 部 件,可 靠 性 高 于传统的速度传感器
面板安装
DIN导轨安装 导轨安装
传感器系统_ 传感器系统 Proximitor®
接线示意
Vt: -24DC COM: 公共端 OUT: 输出信号 Vt: -24DC COM: 公共端 OUT: 输出信号
传感器系统_ 传感器系统 Proximitor®
性能
传感器系统_ 传感器系统 Proximitor®
24 22 20 18
-24V SUPPLY