抖动测试-UI
jitter抖动(相位噪声)的概念及其测量方法(EyeDiagram)
抖动的概念及其测量方法摘要:在数字通信系统,特别是同步系统中,随着系统时钟频率的不断提高,时间抖动成为影响通信质量的关键因素。
本文介绍了时间抖动(jitter)的概念及其分析方法。
关键字:时间抖动、jitter、相位噪声、测量一、引言随着通信系统中的时钟速率迈入GHz级,抖动这个在模拟设计中十分关键的因素,也开始在数字设计领域中日益得到人们的重视。
在高速系统中,时钟或振荡器波形的时序误差会限制一个数字I/O接口的最大速率。
不仅如此,它还会导致通信链路的误码率增大,甚至限制A/D转换器的动态范围。
有资料表明在3GHz 以上的系统中,时间抖动(jitter)会导致码间干扰(ISI),造成传输误码率上升。
在此趋势下,高速数字设备的设计师们也开始更多地关注时序因素。
本文向数字设计师们介绍了抖动的基本概念,分析了它对系统性能的影响,并给出了能够将相位抖动降至最低的常用电路技术。
二、时间抖动的概念在理想情况下,一个频率固定的完美的脉冲信号(以1MHz为例)的持续时间应该恰好是1us,每500ns有一个跳变沿。
但不幸的是,这种信号并不存在。
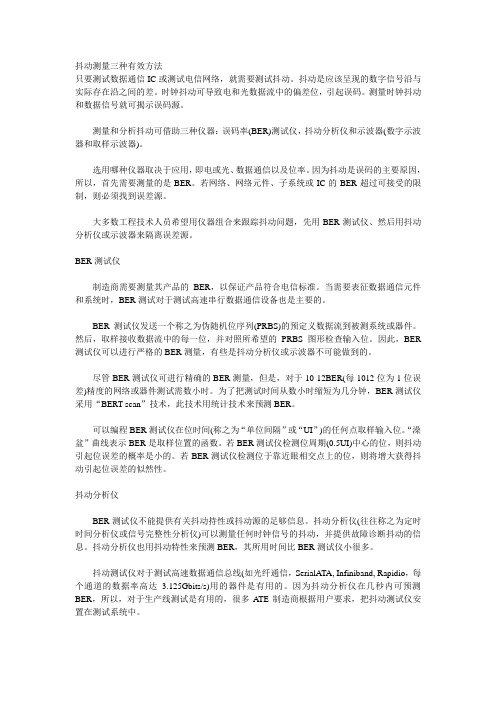
如图1所示,信号周期的长度总会有一定变化,从而导致下一个沿的到来时间不确定。
这种不确定就是抖动。
抖动是对信号时域变化的测量结果,它从本质上描述了信号周期距离其理想值偏离了多少。
在绝大多数文献和规范中,时间抖动(jitter)被定义为高速串行信号边沿到来时刻与理想时刻的偏差,所不同的是某些规范中将这种偏差中缓慢变化的成分称为时间游走(wander),而将变化较快的成分定义为时间抖(jitter)。
图1 时间抖动示意图1.时间抖动的分类抖动有两种主要类型:确定性抖动和随机性抖动。
确定性抖动是由可识别的干扰信号造成的,这种抖动通常幅度有限,具备特定的(而非随机的)产生原因,而且不能进行统计分析。
随机抖动是指由较难预测的因素导致的时序变化。
例如,能够影响半导体晶体材料迁移率的温度因素,就可能造成载子流的随机变化。
高速数字信号的眼图和抖动测量技术(基于Keysight示波器测量)
的,周期性波形
• 效果相当于调频FM
• 可能的抖动源:电源的EMI干扰、扩频时钟SSC的调制信号
TIE Trend曲线,即 TIE随时间变化的曲线, 呈现出正弦波特性
深圳市飞尔沃科技©
V 1.0
19
占空比失真DCD
• 不对称的上升边沿速率与下降边沿速率
• 不适当的判断门限选择
深圳市飞尔沃科技©
V 1.0
深圳市飞尔沃科技©
V 1.0
23
Bathtub曲线
• Bathtub曲线的中部大部分地 受到Rj的影响 • 靠向眼睛交叉点较大地受到Dj 影响 • 在既定的BER水平下,Dj的PkPk值与Rj的标准偏差值影响眼 睛的张开度
深圳市飞尔沃科技©
V 1.0
24
TJ(BER)的估算
For a BER = 10-12 JPPRJ = 14 s …7 for each tail
安捷伦仪器与仪表产品培训课程
高速数字信号的 眼图和抖动测量技术
深圳市飞尔沃科技©
V 1.0
1
内容纲要
第一部分:眼图和抖动测量简介 第二部分:眼图测量的操作步骤 第三部分:抖动测量的操作步骤 第四部分:抖动分解的操作步骤
深圳市飞尔沃科技©
V 1.0
2
第一部分: 眼图和抖动测量简介
深圳市飞尔沃科技©
抖动的常见术语
抖动测试的衡量方法
• 平均值(mean)
• 标准偏差(standard deviation)
• 峰-峰值(peak to peak)
深圳市飞尔沃科技©
V 1.0
14
抖动测量举例
0.0 ns 0.990 ns 2.000 ns 2.980 ns 4.000 ns
SDH设备抖动测试

SDH设备抖动测试佚名【摘要】Transmission equipment has undergone several generations of updates, and it has been gradually completed the transition from analog devices to the PDH and SDH equipment. There are many advantage of SDH equipment that PDH equipment can not match, but it also has some defects, such as jitter induced by pointer adjustment. The jitter of the transmission equipment is very important for the quality of communication, for this reason, through theoretical analysis, combined with the actual test, the jitter measurements in transmission equipment engineering acceptance are discussed in detail.% 传输设备经历了几代更新,已逐步完成了模拟设备到PDH设备和SDH设备的过渡。
SDH有许多PDH 设备所不能比拟的优点,但也存在一些缺陷,比如指针调整引起的抖动。
由于传输设备的抖动对通信质量至关重要,文中通过理论分析,结合实际测试,对传输设备工程验收中抖动指标的测量进行了详细的论述。
【期刊名称】《物联网技术》【年(卷),期】2013(000)007【总页数】4页(P57-59,61)【关键词】SDH数字设备;相位噪声;抖动测量;通信【正文语种】中文【中图分类】TP212通信技术的迅猛发展,使得网络的核心部分发生了巨大的变化,越来越多的数字传输设备逐渐取代了原有的模拟设备。
如何通过实时示波器进行抖动测试和分析

器配合 TDSJIT3 抖动分析软件进行抖动测试和分析。图 1 是 TDSJIT3 实时抖动测试结果。
图 1 TDSJIT3 进行高速数据的抖动测试和抖动分解
3. 抖动测试
抖动可以描述为相邻脉冲边沿、甚至非相邻脉冲边沿周期或相位的定时变化。这些指标适 合检定长期和短期的时钟和数据稳定性。通过更加深入地分析抖动指标,利用抖动测试结果, 预测复杂系统的数据传输性能。
测量误差可能会高达50 ps峰值,RMS结果将受到类似的影响,因为时基误差是确定的。在 这种情况下,我们看到在测量时间更长时,常数0.3所决定的短期抖动效应变得不如时基校准和 稳定性对长时间结果的影响明显。在泰克示波器中,采用一种独有硬件技术保证更高的时间测 试精度,称为实时内差模式,它作用在示波器采集前端,通过sinx/x内差算法在ADC的样点间插 入样点,并且可以调节插入的样点数目,最小样点间隔为500fs。
检验JNF的方法之一是测量没有噪声的、完美定时的信号。尽管完美信号非常少见,但适
ZhangKai, Tektronix China
当良好的信号源是存在的,可以用来表征抖动本底噪声。一般用于这一测试的常用仪器是具有 低相位噪声的高精度RF发生器。
泰克示波器使用时间间隔误差(TIE)来测量JNF。TIE是最优方法,因为它测试出信号中的任 何相位误差,而不管误差具有高频特点还是低频特点,是单次事件误差还是累积误差。此外, 在实时示波器中,TIE方法可以将计算得到的完美时钟作为参考时钟源。
对于数字示波器而言,典型的抖动测试方法主要有 2 种: 1) 采用数字存储示波器的等效采样模式或直接使用采样示波器,通过直方图统计测量累计定
时抖动。等效采样的缺点是无法消除示波器自身的触发抖动对测试结果的影响,并且由于 它采用的是多次触发,多次采集,累计显示的工作方式,对于电路设计和调试而言受到较 多的限制,无法进行深层的抖动分析。另一个限制是该方法抖动测试参数有限,例如不能 测试周期间抖动。 2) 3) 更为流行的方法是采用数字存储示波器的实时捕获模式,单次触发,连续采集大量数据, 配合相应的抖动测试软件进行抖动测试。当通过实时采集模式时,由于示波器工作在单次 触发模式,连续实时采集所有信号,所以它不受仪器多次触发带来的触发抖动影响。并且 它可以通过复杂的抖动分析和抖动分解得到每一个抖动分量,帮助设计和测试人员分析抖 动产生的原因,甚至通过抖动分解估算系统的误码率。例如,在美国国家信息标准委员会 (INCITS)下属的 T11.2 组织在有关抖动和信号完整性方法论(MJSQ)中,推荐泰克实时示波
Jitter_数字信号抖动的测试

f 此图是频谱图,从图上
可以很容易的分析出抖 动的频率分布情况,从 而帮助找到抖动的根 源,去除抖动,指导电 路调试。
35
浴盆曲线分析
f 水平轴显示 BER Eye
Opening,垂直轴为累 积的bit数
f 此图显示误码率及累积
次数的曲线图,从图上 可以很容易的分析出 BER必须使用很 长存储深度捕获数据, 才能发现数据的变化规 律
29
周期趋势统计分析
f 水平轴显示每一个测量
点,垂直轴为测量的数 值
f 右上方显示光标值
f 此图可呈现每一个周期
的抖动偏移量,从而了 解此时钟信号的周期趋 势
30
抖动滤波(Jitter3 V2新功能)
31
滤波器模型
可以根据需要设置滤波器模型的 参数,对时间趋势图或周期趋势图 进行低通滤波,带通滤波,高通滤 波分析不同频段的抖动趋势。
32
抖动滤波应用:用5MHz的截止频率进行低通滤波
33
抖动滤波应用: 用35K的截止频率进行低通滤波
34
抖动频谱统计分析-追溯抖动根源
f 水平轴显示抖动频率,
垂直轴为每一个频率点 抖动幅度
直方图(Histogram)统计分析 时间趋势(Time Trend)统计分析 周期趋势(Cycle Trend)统计分析 抖动频谱(Spectrum)统计分析 浴盆曲线(BathTub)统计分析
25
测量参数
f TDS7000系列示波器配合
TDSJit3应用软件
f 测量参数包括: – 时钟(10项) – 数据(4项) – 时钟-数据(3项) – 通用(8项) 共 4类25项参数 f 一次可同时测量任意6项参
15
结合抖动测试方法

ANT-20E结合抖动测试方法(仅供内部使用)拟制:日期:审核:日期:yyyy/mm/dd 审核:日期:yyyy/mm/dd 批准:日期:yyyy/mm/dd华为技术有限公司版权所有不得复制目录1 结合抖动的定义和指标描述 (3)1 E1信号结合抖动测试方法和步骤 (4)2 E3信号结合抖动测试方法和步骤 (11)3 E4信号结合抖动测试方法和步骤 (16)结合抖动的定义和指标描述SDH设备的结合抖动是支路映射和指针调整结合作用,在设备解复用侧的PDH支路输出口所产生的抖动。
在ITU-T规范的四种特定指针调整序列下的结合抖动指标见下表。
测试用指针序列a、b、c、d分别定义如下:a-极性相反的单指针;b-规则指针加一个双指针;c-漏掉一个指针的规则单指针;d-极性相反的双指针。
下面以2M信号为例,解释各个指针序列的定义:a指针序列:比如说目前的指针值为522相隔T1时间后将指针值减一即为521,再相隔T1时间后将指针值在加一即为522,就这样循环往复就形成了指针序列a。
b指针序列:比如说目前的指针值为522相隔T2时间后将指针值加一即为523,再相隔T2时间后将指针值加一即为524,如此循环4次后再隔T3的时间将指针值加一。
就这样按照四个T2加一个T3为一个循环周期,循环往复就形成了指针序列b。
c指针序列:比如说目前的指针值为522相隔T2时间后将指针值加一即为523,再相隔T2时间后将指针值加一即为524,如此循环4次后再隔T2的时间指针值不变。
就这样按照五个T2为一个循环周期,循环往复就形成了指针序列c。
d指针序列:比如说目前的指针值为522相隔T3时间后将指针值加一即为523,再相隔T1时间后将指针值减一即为522,再相隔一个T3时间后将指针值加一即为521,再相隔一个T1时间后将指针值加一即为522。
就这样以两个T1加T3为周期,循环往复就形成了指针序列d。
1E1信号结合抖动测试方法和步骤1、按下图接好电路和仪表。
抖动测量的三种方法
抖动测量三种有效方法只要测试数据通信IC或测试电信网络,就需要测试抖动。
抖动是应该呈现的数字信号沿与实际存在沿之间的差。
时钟抖动可导致电和光数据流中的偏差位,引起误码。
测量时钟抖动和数据信号就可揭示误码源。
测量和分析抖动可借助三种仪器:误码率(BER)测试仪,抖动分析仪和示波器(数字示波器和取样示波器)。
选用哪种仪器取决于应用,即电或光、数据通信以及位率。
因为抖动是误码的主要原因,所以,首先需要测量的是BER。
若网络、网络元件、子系统或IC的BER超过可接受的限制,则必须找到误差源。
大多数工程技术人员希望用仪器组合来跟踪抖动问题,先用BER测试仪、然后用抖动分析仪或示波器来隔离误差源。
BER测试仪制造商需要测量其产品的BER,以保证产品符合电信标准。
当需要表征数据通信元件和系统时,BER测试对于测试高速串行数据通信设备也是主要的。
BER测试仪发送一个称之为伪随机位序列(PRBS)的预定义数据流到被测系统或器件。
然后,取样接收数据流中的每一位,并对照所希望的PRBS图形检查输入位。
因此,BER 测试仪可以进行严格的BER测量,有些是抖动分析仪或示波器不可能做到的。
尽管BER测试仪可进行精确的BER测量,但是,对于10-12BER(每1012位为1位误差)精度的网络或器件测试需数小时。
为了把测试时间从数小时缩短为几分钟,BER测试仪采用“BERT scan”技术,此技术用统计技术来预测BER。
可以编程BER测试仪在位时间(称之为“单位间隔”或“UI”)的任何点取样输入位。
“澡盆”曲线表示BER是取样位置的函数。
若BER测试仪检测位周期(0.5UI)中心的位,则抖动引起位误差的概率是小的。
若BER测试仪检测位于靠近眼相交点上的位,则将增大获得抖动引起位误差的似然性。
抖动分析仪BER测试仪不能提供有关抖动持性或抖动源的足够信息。
抖动分析仪(往往称之为定时时间分析仪或信号完整性分析仪)可以测量任何时钟信号的抖动,并提供故障诊断抖动的信息。
抖动测试原理

Slide 5
抖动和漂移的定义
(a) Reference signal
(b) Measured signal
Jitter amplitude (UIpp)
(c) Measured signal Phase 1
(d) Measured signal Phase 2 Tm = (e) Measured signal Phase 3 1 fm
基于2048 kbit/s 系列的数字网络中的抖动和漂移的控制 基于1544 kbit/s 系列的数字网络中的抖动和漂移的控制 基于SDH系列的数字网络中的抖动和漂移的控制 基于光纤上SDH的数字线路系统
SDH设备功能块的特性
SG15
G.958 G.783
Slide 11
Slide 7
抖动和漂移的定义
1 UI 1 UI 1 UI
(a) RZ (Return to Zero)
"1" 1 UI "0" 1 UI "1"
1 UI
(b) NRZ (Non Return to Zero)
"1" "0" "1"
1 UI
1 UI
1 UI
(c) Bipolar Code
1 UI
1 UI
Slide 10
ITU-T 主要抖动和漂移标准
SG No. Rec. No SG4 O.171 O.172 SG13 G.811 G.812 G.813 G.823 G.824 G.825 建议名称 PDH抖动和漂移测量设备 SDH抖动和漂移测量设备 基群参考时钟的定时要求 从时钟的定时要求
SDH设备从时钟的定时特性
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第六部分抖动测试6、1 抖动特性一、抖动的概念在理想情况下,数字信号在时间域上的位置是确定的,即在预定的时间位置上将会出现数字脉冲(1或0)。
然而由于种种非理想的因素会导致数字信号偏离它的理想时间位置。
我们将数字信号的特定时刻(例如最佳抽样时刻)相对其理想时间位置的短时间偏离称为定时抖动,简称抖动。
这里所谓短时间偏离是指变化频率高于10Hz的相位变化,而将低于10Hz的相位变化称为漂移。
事实上,两者的区分不仅在相位变化的频率不同,而且在产生机理、特性和对网络的影响方面也不尽相同。
定时抖动对网络的性能损伤表现在下面几个方面:*对数字编码的模拟信号,解码后数字流的随机相位抖动使恢复后的样值具有不规则的相位,从而造成输出模拟信号的失真,形成所谓抖动噪声,影响业务信号质量,特别是图像信号质量。
*在再生器中,定时的不规则性使有效判决点偏离接收眼图的中心,从而降低了再生器的信噪比余度,直至发生误码。
*对于需要缓存器和相位比较器的数字设备,过大的抖动会造成缓存器的溢出或取空,从而导致不可控滑动损伤。
二、抖动机理1、PDH与SDH共有的抖动源(1)、随机性抖动源* 各类噪声源* 定时滤波器失谐* 完全不相关的图案抖动(2)、系统性抖动源* 码间干扰* 有限脉宽作用* 限幅器的门限漂移* 激光器的图案效应2、SDH设备特有的抖动机理(1)、指针调整抖动SDH设备的支路信号的同步机理采用所谓的指针调整,即利用指针值的增减调整来补偿低速支路信号的相位变化和频率变化,由于指针调整是按字节为单位进行的,调整时将带来很大的相位跃变。
带有这些相位跃变的数字信号通过带限电路时将会产生很长的相位过滤过程。
处于正常同步工作的SDH网中的指针调整主要是由于同步分配过程中的随机噪声引起的,因而由之引起的相位跃变的出现时刻是不规律的,整个相位调整的时间可能很长。
因此,指针调整与网同步的结合将在SDH/PDH边界产生很低频率的抖动或漂移,这种抖动称为指针调整抖动。
(2)、映射抖动SDH利用塞入比特的方法将准同步支路的信号映射进STM-1帧结构并进行传送,在SDH网关处,只要去掉塞入比特和通道开销(留下空隙)后即可恢复支路信号。
为了平滑这些带有空隙的信号的相位和减少抖动,一般需要缓存器和相位平滑电路,在SDH中称为解同步器。
上述由于纯粹去映射过程引进的抖动称为准同步支路的映射抖动。
由于指针调整是按单字节或3字节进行的,而映射时是按单比特塞入进行的,因而指针调整产生的相位跃变影响要大得多,是SDH/PDH边界的主要抖动来源,必须采取特殊技术措施加以限制。
6、2 输入抖动容限一、PDH支路口的输入抖动容限1、指标要求:输入抖动和漂移容限定义为使系统产生某一指定的误码性能劣化量的正弦抖动幅度。
但判定指定误码性能劣化量的准则却有两种。
* 准则1(出误码准则):抖动容限定义为施加在输入信号上恰好使系统在连续30秒测量间隔内产生不多于2个误码秒的最大正弦调制抖动信号峰--峰值。
在实际应用中常将抖动容限定义为施加在输入信号上恰好使系统不产生误码的正弦调制抖动信号的峰--峰值,测试等待时间不短于60秒。
* 准则2(功率代价准则):抖动容限定义为施加在输入信号上恰好使系统产生1dB功率代价的正弦调制抖动信号的峰--峰值,测试等待时间不短于60秒。
目前国内多流行上述简化的出误码准则,将来则必须向功率代 价准则过渡。
PDH 支路输入口输入抖动和漂移特性的指标值见图1及表1。
幅度f0 f10 f9 f8 f1 f2 f3 f4 抖动和漂移频率(对数)图1:PDH 支路口输入抖动和漂移容限指标2、 基本测试配置:基本测试配置见图2。
图2:SDH设备PDH支路口输入口抖动容限测试配置3、测试步骤:1)、按图2接好电路,配置网元和SDH测试仪,使系统正常工作,确认SDH测试设备无抖动产生,并且没有检出告警或差错;2)、激活测试设备上的抖动产生,按图1和表1抖动模板规定的范围设置抖动调制频率并记录下此时的频率值,设置抖动幅度为0UI PP;3)、逐渐增大抖动幅度,直至设备在测试通道中刚好不出现误码的时刻,连续观察60秒,如仍无误码产生则记录下此时的抖动振幅值(出误码准则);4)、改变抖动容限模板范围内的抖动频率,重复以上步骤根据得到的抖动频率值和振幅值,画出抖动容限曲线,画出的抖动容限曲线必须在图1所示的容限模之上。
注:对于具有自动容限测试功能的SDH测试设备,按第1步设置好后,可进入测试仪的自动容限测试菜单,仪表即可自动完成测试并绘出输入抖动容限曲线,并与标准模板进行比较。
对于功率代价准则,其基本原理与SDH 线路口相同,将在SDH 抖动容限测试部分进行介绍,此处不再繁述。
二、SDH 线路口的输入抖动容限 1、指标要求:SDH 线路口的输入抖动容限规范方法与支路口相同,ITU-T G .825规定了其相应的容限模板。
具体要求见图3及表2。
抖动幅度f0 f12 f11 f10 f9 f8 f1 f2 f3 f4 抖动和漂移频率(对数)图3:SDH 抖动容限模板(ITU-T G.825)注:模板所示为A型网元(宽带)在接口测试的时钟恢复,对B型网元(窄带)的模板可参见ITU-T G.958。
作为安装或维护测试,只需按ITU-T G.958模板进行测试即可,而对于设计检验测试,则依据ITU-T G.825全频段模板更为合适。
2、测试基本配置:测试基本配置见图4。
测试图案落地,则环回该支路图4:SDH输入口抖动容限测试配置3、测试步骤:1)、配置网元,选择VC-n测试通道(选择NE支持的最大通道(带宽)作为测试通道,以便节省测试时间);2)、配置SDH测试设备:设置映射类型、VC-n测试通路、净负荷中PRBS测试图案,确认仪表无抖动产生(发送STM-N中无抖动),并且没有检测到无告警或差错;3)、利用光衰减器减小NE的输入光功率,直至测试设备在测试通道中检测到BER=10 -10为止;注:光接收机的灵敏度定义为误码率=10 –10时的最小输入光功率。
4)、利用光衰减器将网元输入光功率增加1dB(功率代价准则),这将使误码率变为 10 –10(更好);5)、激活测试设备上的抖动产生:在ITU-T G.958抖动模板规定的范围内设置抖动调制频率并记录下此时的频率值,设置抖动幅度为0UI PP,逐渐增大抖动振幅,直至测试设备在测试通道中检测到BER=10 -10为止,记录下此时的抖动振幅值;6)、改变抖动容限模板范围内的抖动频率,重复以上步骤,根据得到的抖动频率值和振幅值,画出抖动容限曲线。
注1:采用BER=10 –10将导致相当长的测试时间,而适当降低BER级别可有效减小测试时间。
一般来说,BER为10 –7、10 –8、10 –9数量级时,即可获得有效的抖动容限。
注2:对于具有自动容限测试功能的SDH测试设备,仪表可自动完成测试并绘出输入抖动容限曲线,并与标准模板进行比较。
注3:对于出误码准则测试方法,其基本原理与PDH支路口相同,可参照PDH抖动容限测试部分,此处不再繁述。
6、3输出固有抖动一、网络接口的最大允许抖动1、指标要求:注:此项测试要求一般针对系统(即整个网络)性能测试进行,对单个设备不作要求。
PDH网络接口及设备输出口输出抖动的指标要求及所用测试滤波器的截止频率见表3,SDH网络接口及设备输出口输出抖动的指标要求及所用测试滤波器的截止频率见表4,滤波器的频率响应按20dB/10倍频程滚降。
表3:PDH网络接口的最大允许抖动表4:SDH网络接口的最大允许抖动2、基本测试配置:图5:SDH网络接口输出抖动的现场测试配置图6:PDH支路口输出抖动现场测试配置3、网络最大允许抖动的测试配置如图5和图6所示,其测试步骤非常简单,只需按图接好系统后在测试仪上采用不同带宽的测试滤波器进行60秒抖动峰—峰值测试即可测出结果。
测试中需注意SDH 测试设备无论在STM-N线路还是在PDH支路上均不能有抖动产生。
二、SDH设备抖动产生(设备输出固有抖动)1、指标要求:ITU-T 建议G.958规定的网元的SDH光接口输出抖动的最大可接受值为0.01UIrms(在无输入抖动情况下测量,ITU-T G.958称此输出抖动为抖动产生。
2、基本测试配置:基本测试配置见图7。
图7:SDH设备抖动产生测试配置3、测试步骤:1)、配置网元:使激光器自动切断无效(如果网元支持此功能),或者将NE本端的光发射机与光接收机环回(注意光功率)。
2)、配置SDH测试设备:设置STM-N线路速率、映射类型,确保无抖动产生(发送STM-N信号中无抖动),设置接收机测量UIrms 抖动(最高灵敏档),选择12kHz高通测量滤波器。
3)、测量并记录来自网元的输出抖动幅度,与ITU-T G.958规范的0.01UIrms上限值进行比较。
三、PDH支路抖动从SDH网络来的PDH输出信号产生抖动的两个基本原因如下:指针调整-补偿SDH网络中不同节点间的异步运行(网络同步)●比特塞入调整处理-在将异步信号映射到同步传送信号时完成。
指针调整所产生的抖动更为严重。
ITU-T G.783规定了由以上每一种原因所引起抖动的最大可接受限值。
要确认SDH网元符合标准,需要进行以下两个单独测试:●指针调整抖动测试(也称为结合抖动测试)●去映射抖动测试A、指针调整抖动由指针调整产生的抖动与以前PDH网络中的抖动特性完全不同:--这是一个瞬态的特性;--振幅相对而言较高;--大部分能量集中在低频部分。
1、指标要求:ITU-T G.783建议规定的指针调整抖动指标见表5。
** 相当于测试滤波器LP1+HP2注:对于ITU-T G.783引入的指针调整序列E、F、G、H,仅与SONET 网有关,这里不再讨论。
表5:指针调整抖动指标及相应测试滤波器2、基本测试配置;图8给出了测试SDH网元的指针调整抖动的测试配置。
图8:指针调整抖动测试配置注1:SDH测试设备和网络单元必须用同一个时钟来同步,以免出现不希望的指针调整。
注2:SDH测试设备应具有针对含有映射PDH测试信号的VC-n 产生符合G.783的指针调整序列的功能。
注3:在指针调整抖动测试中,允许存在一定范围内的速率偏移,SDH测试设备应能支持这一特性。
指针调整抖动测试SDH测试设备的设置见表6。
表6:指针抖动测量-SDH测试设备的设置3、测试步骤:1)、将SDH测试设备SDH、PDH部分分别与网元相连(见图8),注意需将SDH测试设备与网元同步;2)、配置SDH测试设备SDH发送部分:设置STM-N线路速率、映射类型、VC-n测试通路和净负荷中PRBS测试图案,设置PDH净负荷的频率偏移为测试范围内的任意值,建立并运行G.783 AU/TU指针序列A;3)、配置SDH测试设备PDH接收部分:设置PDH速率、PRBS 测试图案与SDH发送部分的净负荷相同,设置测试时间为20s、测试方式为测试峰-峰抖动UI PP、测量滤波器为LP+HP1(见表6);4)、确认SDH测试设备未检测到任何告警或差错;5)、在连续10个测量周期中,测量并记录抖动峰-峰值,与G.783建议的容限进行比较;6)、将滤波器设置为LP+HP2,重复第5步;7)、用指针序列B、C、D重复以上过程,但对序列B、C测试时间为30s。