基于PLC的两工位钻孔攻丝组合机床控制系统设计
基于PLC的钻孔组合机床控制系统设计

基于PLC的钻孔组合机床控制系统设计摘要:钻孔组合机床是一种常用的加工设备,其控制系统对于机床的工作效率和加工质量有着重要的影响。
本文基于PLC(可编程逻辑控制器)技术,设计了一种钻孔组合机床控制系统,并对系统进行了仿真和实验验证。
实验结果表明,该控制系统能够稳定可靠地控制钻孔组合机床的工作,并且具有较高的精度和效率。
关键词:PLC;钻孔组合机床;控制系统;仿真;实验验证一、引言钻孔组合机床是一种常用的加工设备,广泛应用于各行各业。
传统的钻孔组合机床控制系统多采用电磁继电器和电路控制的方式,具有控制精度低、可靠性差等缺点。
而PLC技术具有编程灵活、控制精度高、可靠性好等优点,因此在钻孔组合机床控制系统中得到了广泛应用。
本文基于PLC技术,设计了一种钻孔组合机床控制系统,并对系统进行了仿真和实验验证。
二、PLC钻孔组合机床控制系统的设计1.控制系统硬件设计PLC钻孔组合机床控制系统的硬件部分包括PLC主控模块、人机界面模块、执行机构模块等。
PLC主控模块实现对整个控制系统各部分的控制指令的解码和执行;人机界面模块为操作员提供了直观的控制界面;执行机构模块负责实际的加工操作。
2.控制系统软件设计PLC钻孔组合机床控制系统的软件部分主要包括控制程序的编写和参数设置。
控制程序的编写是整个软件设计的核心,包括自动控制程序、手动控制程序、故障检测程序等。
参数设置是根据具体的机床和工件进行的,包括钻孔深度、钻孔速度等参数的设置。
三、PLC钻孔组合机床控制系统的仿真为了验证设计的控制系统的正确性和可行性,本文进行了系统的仿真。
仿真结果表明,控制系统能够稳定可靠地控制钻孔组合机床的工作,并且具有较高的精度和效率。
四、PLC钻孔组合机床控制系统的实验验证根据仿真结果,设计了实验验证方案,并进行了实验。
实验结果表明,控制系统能够稳定可靠地控制钻孔组合机床的工作,实现了钻孔深度和钻孔速度的准确控制。
五、总结通过本文的研究,基于PLC的钻孔组合机床控制系统设计得到了较好的结果。
毕业设计---plc控制组合钻床设计.

摘要制造业是一个同家或地区经济发展的重要支柱,其发展水平标志着该国家或地区的经济实力、科技水平、生活水准和国防实力。
而制造业的生产能力主要取决于制造装备——机床的先进程度。
木文对减速器箱盖连接孔的加工工艺进行了详细的分析,就其孔的加工提出了“一次装夹,多工位加工,达到产品图样的精度要求”的思路。
根据这一思路设计了组合钻床。
该组合钻床由立柱、立柱底座、中问底座、Y、Z轴液K滑台、液压站、动力头、刀具、控制部分等组成。
本文对各部分的设计进行了详细的计算和论证,并提出了优化工艺结构的方法。
采用的PLC控制稳定可靠。
它的研制成功对提高箱盖孔加工的工作效率和质量具有重要的意义。
机床设计分析后,提高工效3~5倍,达到了国内同行业的领先水平。
关键词:制造业;减速器;网轴头多工位同步钻床;组合机床;PLC控制目录摘要 (I)第1章绪论………………………………………………………………………lI.I 机床在国民经济的地位及其发展……………………………………………l1.2机床设计的日的、内容、要求 (2)1.2.1 设计的目的……………………………………………………………2I .2.2设计内容 (2)1.2.3设汁要求 (2)1.3机床的设计步骤 (2)第2章四轴头多工位同步钻床总体设计 (4)2.1 组合机床方案的制定 (4)2.1.1制定工艺办案 (4)2.1.2确定组合机床的配置形式和结构方案一…. 42.2确定切削用量及选择刀具.... (6)2.2.1 确定工序间余量…一…. 62.2.2选择切削用量……一…. 62.2.3确定切削刀、切削扭矩、切削功率…一…. 62.2.4 选择刀具结构....... (7)2.3 四轴头多工位同步钻床总设计“三图一卡”的编制…..….72.3.1 被加工零件工序图………一…. 72.3.2 加工示意图……一…. 92.3.3机床联系尺寸图.... (13)2.3.4生产率计算卡…….… l 5第3章电气控制 (17)3.1 运动分析......一 (17)3.2控制要求及功能分配…………. 173.2.1控制要求……. 173.2.2功能分配………………….…. 183.3 PLC的选择及其I/O端子分配…………. 183.3.1 PLC的选择………….183.3.2 I/O分配表……. 183.3.3 PLC接线图…………. 193.4应用程序的编制…………………………. 193.4.1 整体程序结构………. 193.4.2 手动操作模块………. 213.4.3 自动操作模块………. 223.4.4 编制程序……. 26参考文献..... (28)致谢 (29)III第1章绪论1.1 机床在国民经济的地位及其发展简史现代社会中,人们为了高效、经济地牛产各种高质量产品,日益广泛的使用各种机器、仪器和工具等技术设备与装备。
基于PLC的组合机床控制系统设计
基于PLC的组合机床控制系统设计摘要组合机床是一种集多种加工方式于一身的高端智能化设备。
本文基于PLC平台,设计和实现了一套组合机床控制系统,以实现多种加工方式的联合操作。
在系统设计中,首先对组合机床的结构和工作原理进行了详细分析和描述,随后选择合适的PLC控制器,根据系统控制需求,编写程序实现各种加工作业的自动控制和监控。
通过仿真实验,验证了系统的稳定性和实用性,结果表明该系统可以支持多种加工方式的组合操作,同时保证加工质量和工作效率的提高。
AbstractCombined machine tool is a high-end intelligent equipment that integrates multiple processing methods. Based on the PLC platform, this paper designs and implements a set of combined machine tool control system to realize the joint operation of multiple processing methods. In the system design, the structure and working principle of the combined machine tool are analyzed and described in detail. Then the appropriate PLC controller is selected, and the program is written according to the system control requirements to realize automatic control and monitoring of various processing tasks. Through simulation experiments, thestability and practicality of the system are verified. The results show that the system can support the combined operation of multiple processing methods while ensuring the improvement of processing quality and work efficiency.关键词:组合机床;PLC控制;加工质量;工作效率;仿真实验Keywords: combined machine tool; PLC control; processing quality; work efficiency; simulation experiment一、研究背景随着工业技术的快速发展,组合机床逐渐成为了制造业领域中的重要设备。
基于PLC控制的数控钻孔机的设计与实现
基于PLC控制的数控钻孔机的设计与实现随着科技的进步和工业自动化水平的提高,数控(Numerical Control)钻孔机在工业生产中得到了广泛的应用。
数控钻孔机的设计与实现基于PLC(Programmable Logic Controller)控制,PLC控制具有可靠性高、灵活性强等优点。
本文将介绍基于PLC控制的数控钻孔机的设计与实现。
首先,在数控钻孔机的设计中,我们需要考虑到几个方面。
首先是机械部分的设计,包括钻头的选择、主轴的设计、夹持装置的设计等。
其次是电气部分的设计,主要包括电机的选择、传感器的选择、电气线路的设计等。
最后是PLC控制程序的编写,需要根据实际需求设计钻孔程序。
在机械部分的设计中,我们需要选择适合的钻头来满足不同的钻孔需求。
常见的钻头有立铣钻头、圆滚钻头等。
主轴的设计需要考虑到主轴的转速和稳定性,可以选择带有变频器的电机来调整主轴的转速。
夹持装置的设计需要满足钻孔材料的夹持需求,可以选择气动夹紧装置或电动夹紧装置。
在电气部分的设计中,我们需要选择适合的电机来驱动主轴。
根据钻孔材料的不同,可以选择不同功率的电机。
传感器的选择需要满足对材料位置和尺寸的检测需求,可以选择接近开关、压力传感器等传感器。
电气线路的设计需要根据实际需求进行布线,保证线路的安全稳定。
在PLC控制程序的编写中,我们需要根据实际需求设计钻孔程序。
首先,我们需要编写一个启动程序,通过点击按钮或接近开关来启动钻孔机的工作。
然后,我们需要编写一个控制程序,通过设定参数来控制钻孔机的运行。
控制程序可以设置钻孔深度、钻孔速度等参数。
最后,我们还需要编写一个停止程序,当钻孔完成或发生异常情况时,通过点击按钮或接近开关来停止钻孔机的工作。
总结起来,基于PLC控制的数控钻孔机的设计与实现需要考虑到机械部分的设计、电气部分的设计以及PLC控制程序的编写。
通过合理的设计和实施,可以实现数控钻孔机的自动化控制,提高生产效率,降低人工成本,提高产品质量。
基于PLC的两工位钻孔攻丝组合机床控制系统设计

基于P L C的两工位钻孔攻丝组合机床控制系统设计摘要随着机床行业和控制技术的不断发展与进步,根据生产的实际需要,机床的升级改造已成为一种新兴的行业。
通过对现有机床的全部或局部结构进行改造,来提高机床的各项技术指标,对于实现资源的合理利用和促进经济增长起到重要的作用。
本课题主要研究的是采用PLC控制两工位钻孔攻丝组合机床的动作。
两工位钻孔攻丝组合机床通电后能自动完成工件的钻孔和攻丝加工。
在传统的控制系统的设备中,通常采用的是继电器控制,这种控制系统可靠性低,而采用PLC进行控制改造后,系统可靠性明显提高。
本次设计的重点在于控制系统的硬件设计,根据工艺要求选择了控制系统所需要的电气元件,绘出电力拖动系统的主回路电路图、PLC的外部接线图。
论文根据机床的加工要求设计了PLC控制的程序,以及对机床的调试进行了简要的概括。
关键词: PLC控制程序设计调试组合机床The Design Of The Control System Of two worktables drilling tapping combination machine Based On The PLCABSTRACTAlong with the development of machine tool industry and technology continues to progress according to the actual needs of the production machine ,upgrading has become a new growth industry based on the existing machine tools in whole or in part the structure upgrades to improve machine tool technology index. To achieve rational use of resources and promote economic growth plays an important role in.This topic main research is to use PLC to control two worktables drilling tapping modular machine tool operation. Two worktables drilling tapping modular machine tool by the system can automatically complete the workpiece. In the control system of the traditional is commonly used in the relay control, and this control system reliability is low, but when it is controlled by a PLCtransformation, system reliability is obviously improved.The focus of this design is that the control system hardware design, according to the process requirements of electrical components control system requires the choice,Drawing the external wiring diagram of main circuit diagram and the PLC electric drive system.This paper designs a PLC control program according to the machine processing requirements, and commissioning of the machine are summarized.KEY WORDS:PLC control The program design debug Combination machine tools前言两工位钻孔攻丝组合机床主要用来给工件钻孔和攻丝的,是人类经济和社会发展的重要工具之一。
自动钻孔攻丝机床的PLC控制

自动钻孔攻丝机床的PLC控制两工位钻孔、攻丝组合机床,能自动完成工件的钻孔和攻丝加工,自动化程度高,生产效率高。
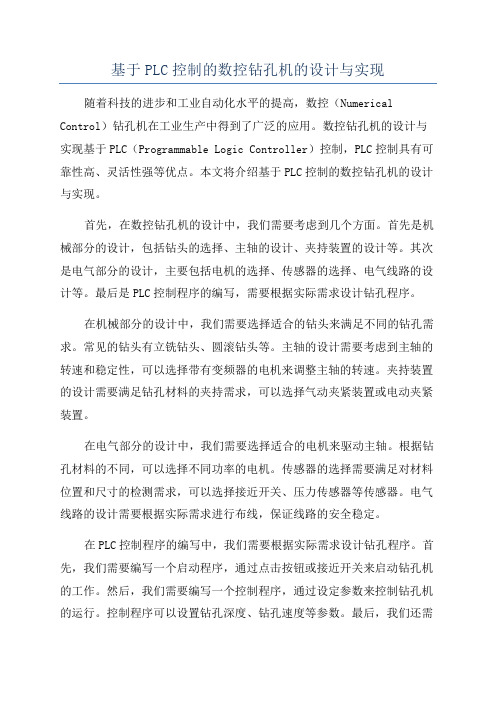
两工位钻孔、攻丝组合机床如图7-32所示。
图7-32 两工位钻孔、攻丝组合机床示意图机床主要由床身、移动工作台、夹具、钻孔滑台、钻孔动力头、攻丝滑台、攻丝动力头、滑台移动控制凸轮和液压系统等组成。
移动工作台和夹具用以完成工件的移动和夹紧,实现自动加工。
钻孔滑台和钻孔动力头,用以实现钻孔加工量的调整和钻孔加工。
攻丝滑台和攻丝动力头,用以实现攻丝加工量的调整和攻丝加工。
工作台的移动(左移、右移),夹具的夹紧、放松,钻孔滑台和攻丝滑台的移动(前移、后移),均由液压系统控制。
其中两个滑台移动的液压系统由滑台移动控制凸轮来控制,工作台的移动和夹具的夹紧与放松由电磁阀控制。
根据设计要求,工作台的移动和滑台的移动应严格按规定的时序同步进行,两种运动密切配合,以提高生产效率。
1. 控制要求系统通电,自动起动液压泵电动机M1。
若机床各部分在原位(工作台在钻孔工位SQ1动作,钻孔滑台在原位SQ2动作,攻丝滑台在原位SQ3动作),并且液压系统压力正常,压力继电器PV动作,原位指示灯HL1亮。
将工件放在工作台上,按下起动按钮SB,夹紧电磁阀YV1得电,液压系统控制夹具将工件夹紧,与此同时控制凸轮电动机M2得电运转。
当夹紧限位SQ4动作后,表明工件已被夹紧。
起动钻孔动力头电动机M3,且由于凸轮电动机M2运转,控制凸轮控制相应的液压阀使钻孔滑台前移,进行钻孔加工。
当钻孔滑台到达终点时,钻孔滑台自动后退,到原位时停,M3同时停止。
等到钻孔滑台回到原位后,工作台右移电磁阀YV2得电,液压系统使工作台右移,当工作台到攻丝工位时,限位开关SQ6动作,工作台停止。
起动攻丝动力头电机M4正转,攻丝滑台开始前移,进行攻丝加工,当攻丝滑台到终点时(终点限位SQ7动作),制动电磁铁DL得电,攻丝动力头制动,0.3s后攻丝动力头电机M4反转,同时攻丝滑台由控制凸轮控制使其自动后退。
基于plc数控钻床控制系统设计

摘要本文主要阐述了传统钻床PLC改造的可行性,并进行了具体的实施方案,传统钻床传统继电控制系统使用大量的中间继电器、时间继电器,控制触点多,因此电气控制系统存在故障率高、可靠性差、接线复杂、不便于检修等缺点.为了提高钻床控制系统的可靠性,降低故障率,提高钻床的加工效益,很多企业对传统控制钻床的电气控制系统进行了改造本文描述了数控机床的基本组成、工作原理、分类及各自的特点。
并且对数控机床中的PLC作了详细的介绍,把PLC在控机床上的控制做了设计。
然后以摇臂钻床Z3040为例,描述了它的设计过程,包括控制系统电路的设计,控制原理设计,主电路设计,主控制电路设计,Z3040摇臂钻床原理图,用PLC编写程序对机床进行控制。
关键词:可编程控制器数控机床数字控制液压控制梯形图原理图目录摘要.............................................................................................第1章绪论 (1)1.1.1 国外研究现状 (1)1.1研究现状与研究意义 (1)1.1.2 国内研究现状 (2)1.1.3 研究的意义 (3)1.2 PLC应用于数控钻出的可能性 (4)第2章总体设计方案 (10)2.1 总体方案的设计 (10)2.2元器件的选型 (11)2.3 PLC的主要类型 (11)2.4 本章小结 (11)第3章摇臂钻床控制线路设计 (13)3.1摇臂钻床控制线路概述 (13)3.1.1 操纵机构液压系统 (13)3.1.2夹紧机构液压系统 (14)3.2摇臂钻床控制线路原理设计 (15)3.3 Z3040摇臂钻床控制线路主电路设计 (16)3.4 Z3040摇臂钻床控制线路控制电路分析 (16)3.4.1主电动机控制电路 (16)3.4.2 摇臂升降控制电路 (16)3.4.3 立柱和主轴箱松开、夹紧控制电路 (17)3.4.4 冷却泵控制电路 (18)3.4.5 照明、信号电路 (18)3.5 本章小结 (18)第4章摇臂钻床PLC控制系统 (19)4.1 PLC的基本特点 (19)4.2 PLC的工作原理 (20)4.3 PLC的选型 (21)4.3.1 确定I/O点数 (22)4.3.2 选配PLC的型号 (22)4.4摇臂钻床的PLC控制I/0(输入、输出)地址分配表 (22)4.5 PLC控制系统设计 (24)4.5.1 主轴电动机控制 (24)4.5.2 摇臂升降控制 (24)4.5.3立柱与主轴箱松开、夹紧控制 (24)第5章技术展望 (25)结论 (27)参考文献 (27)致谢 (29)附录 (30)第1章绪论数控技术是制造业实现自动化、柔性化、集成化生产的基础;数控技术的应用是提高制造业的产品质量和劳动生产率必不可少的重要手段;数控机床是国防工业现代化的重要战略装备,是关系到国家战略地位和体现国家综合国力水平的重要标志。
基于PLC控制的数控钻孔机的设计与实现

基于PLC控制的数控钻孔机的设计与实现数控钻孔机是一种通过计算机数控系统实现自动钻孔的设备,可以实现高精度、高效率的钻孔作业。
本文将基于PLC控制的数控钻孔机的设计与实现进行详细介绍。
1.设计概述数控钻孔机主要由机械部分和控制系统两部分组成。
机械部分主要包括电动机、传动装置和钻头等,控制系统则由PLC控制器和人机界面组成。
2.机械部分设计为了实现高精度的钻孔作业,机械部分需要具备较高的稳定性和刚度。
首先,选择质量较好的电动机,通过减速装置将电动机的转速转为稳定的钻头转速。
其次,使用高硬度的刀具材料,以保证钻头在高速转动时不会变形。
最后,选择高精度的导轨和滑块,确保钻孔机在运动过程中无偏差。
3.PLC控制系统设计PLC控制系统是数控钻孔机的核心部分,它通过计算机数控系统来实现自动化的钻孔操作。
首先,选择适合的PLC控制器,通常选择具有高速计算和多IO口的控制器。
其次,编写PLC程序,根据用户输入的坐标参数和钻头尺寸,计算出钻孔的位置和深度。
然后,通过控制器的输出口,控制电动机的转速和钻头的升降运动,实现自动化的钻孔操作。
最后,在控制界面上添加合适的控制按钮和显示界面,方便用户操作和监测钻孔过程。
4.人机界面设计为了方便操作和监测钻孔过程,需要设计一个直观清晰的人机界面。
在界面上添加坐标输入框和尺寸调节按钮,方便用户输入钻孔的坐标和尺寸参数。
同时,添加控制按钮和监测指示灯,方便用户启动和停止钻孔过程,并实时监测钻孔状态。
另外,在界面上添加错误提示功能,当出现异常情况时能及时提示用户,并采取相应的应对措施。
5.钻孔机的实现在完成设计后,将机械部分和控制系统进行组装和调试。
首先,根据设计要求,选择适合的材料和加工工艺,制作机械部分的各个零件。
然后,组装机械部分,确保各个部件的协调配合。
接下来,将PLC控制器和人机界面与机械部分进行连接,并进行电气布线和信号调试。
最后,进行整机调试和测试,检查钻孔机的各项指标是否符合设计要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于P L C的两工位钻孔攻丝组合机床控制系统设计Prepared on 24 November 2020基于PLC的两工位钻孔攻丝组合机床控制系统设计摘要随着机床行业和控制技术的不断发展与进步,根据生产的实际需要,机床的升级改造已成为一种新兴的行业。
通过对现有机床的全部或局部结构进行改造,来提高机床的各项技术指标,对于实现资源的合理利用和促进经济增长起到重要的作用。
本课题主要研究的是采用P LC控制两工位钻孔攻丝组合机床的动作。
两工位钻孔攻丝组合机床通电后能自动完成工件的钻孔和攻丝加工。
在传统的控制系统的设备中,通常采用的是继电器控制,这种控制系统可靠性低,而采用P LC进行控制改造后,系统可靠性明显提高。
本次设计的重点在于控制系统的硬件设计,根据工艺要求选择了控制系统所需要的电气元件,绘出电力拖动系统的主回路电路图、PLC的外部接线图。
论文根据机床的加工要求设计了P LC控制的程序,以及对机床的调试进行了简要的概括。
关键词: P LC控制程序设计调试组合机床The Design Of The Control System Of two worktables drilling tapping combination machine Based On ThePLCABSTRACTAlong with the development of machine tool industry and technology continues to progress according to the actual needs of the production machine ,upgrading has become a new growth industry based on the existing machine tools in whole or in part the structure upgrades to improve machine tool technology index. To achieve rational use of resources and promote economic growth pl ays an important role in.This topic main research is to use P LC to control two worktables drilling tapping modular machine tool operation. Two worktables drilling tapping modular machine tool by the s ystem canautomaticall y complete the workpiece. In the control s ystem of the traditional is commonl y used in the relay control, and this controlsystem reliabilit y is low, but when it is controlled by a P LC transformation, system reliabilit y is obviousl y improved.The focus of this design is that the control s ystem hardware design, according to the process requirements of electrical componentscontrol system requires the choice,Drawing the external wiring diagram of main circuit diagram and the P LC electric drive system. This paper designs a P LC contr ol program according to the machine processing requirements, and commissioning of the machine are summarized.KEY WORDS: P LC control The program design debugCombination machine tools前言两工位钻孔攻丝组合机床主要用来给工件钻孔和攻丝的,是人类经济和社会发展的重要工具之一。
目前,许多工厂的两工位钻孔攻丝组合机床都还是用接触器的逻辑关系控制的。
由于继电器系统接线比较复杂,故障的诊断与排除较难,造成这些企业的生产率低下,效益差。
随着科学技术的不断发展,P LC在工业控制领域的应用越来越广,如果尝试着将PLC应用在机床上,这样不仅提高了系统的精度,而且还可以为国家节约大量的资源。
组合机床是以通用部件为基础的,再配以按工件特定形状和加工工艺来设计的专用部件和夹具,组成半自动和自动的专用机床。
一般多采用多轴、多工序、多刀、多工位或多面同时加工的方式,生产效率比通用机床高几倍至几十倍。
而加入了P LC则使组合机床抗干扰能力增强,提高了可靠性,使得功能完善,控制系统的设计、安装、调试方便,控制系统结构简单化,通用性增强,应用更加灵活,编程更加方便。
通过对原有资料的查阅和很多人不断的实践证实了用P LC进行两工位钻孔攻丝组合机床的控制系统改造是可行的。
PLC是整个机床电气控制系统的核心,也是重要途径。
结合我国现有机床建设的实际,掌握PLC的关键支持技术,这对于提高制造业重要意义。
为了能将该系统成功的改造,首先应该明确PLC的特性。
可编程控制器是一种专门为在工业环境下应用而设计的进行数字运算操作的电子装置。
它采用可以编制程序的存储器,用来在其内部存储执行逻辑运算、顺序运算、定时、计数和算术运算等操作的指令,并能通过数字式或模拟式的输入和输出,控制各种类型的机械或生产过程。
当前,我国正处在全面建设小康社会和大力提高经济发展的重要时期,如果将这一改造技术在机床改造上进行推广,这将对我国经济的发展做出重要的贡献。
本次课题设计的主要功能是实现两工位钻孔攻丝组合机床在加工过程中的控制。
我采用的是P LC程序控制方法。
机床主要由钻孔滑台、攻丝滑台、移动工作台、夹具、钻孔动力头、攻丝动力头、床身、滑台移动控制凸轮和液压系统组成。
工作台的移动包括左移和右移以及夹具的动作包括夹紧和放松,钻孔滑台和攻丝滑台的移动包括前移和后移,都由液压系统控制与执行的,其中钻孔滑台和攻丝滑台的移动是通过控制凸轮来控制滑台移动液压系统的液压阀实现的,电气系统不参与,只需启动控制凸轮电机即可,控制过程不在本次设计范围之内。
论文简要介绍了P LC的发展、特点与应用,重点介绍P LC的编程特点和方式。
第一章绪论课题的提出和控制系统要求课题的提出当前,许多工厂用的两工位钻孔攻丝组合机床都是以接触器的逻辑关系来控制的。
随着制造行业的不断进步与发展,用这种老式机床进行加工已经达不到工艺精度要求。
随着科技的不断创新,P LC在工业控制领域的应用已越来越广泛,而我对P LC控制有一定的了解,就想如果试着将PLC应用在老式机床上,系统的可靠性应该可以明显提高,所以就确定了这个题目。
两工位钻孔攻丝组合机床的工艺流程对控制系统的要求1. 两工位钻孔攻丝组合机床的概述机床主要由钻孔滑台、攻丝滑台、移动工作台、夹具、钻孔动力头、攻丝动力头、床身、控制滑台移动的凸轮和液压系统等组成。
如下图1-1所示。
图1-1为两工位钻孔攻丝组合机床的结构示意图,机床的左、右分别为钻孔和攻丝的刀具,中间为工作台,左侧为I工位也就是钻孔工位,右侧为II工位即为攻丝工位,可以完成对工件钻孔攻丝的工作。
2. 工艺流程工件推入夹具按启动按钮→夹紧工件→左侧钻孔→工作台右移→右侧攻丝→工作台左移→放松工件,手动拉出工件完成一个工作循环。
3. 刀架的控制工作台的动作要与钻孔滑台和攻丝滑台相互配合,只有钻孔与攻丝滑台在原位时,工作台才可以运动。
4. 设置必要的连锁为了保证机床的各部位能够安全可靠的工作,并且动作互相协调,需要设置必要的保护装置,来避免由于机床误动作而引起的损坏甚至人身事故等。
图1-1 两工位钻孔攻丝组合机床5. 电气控制部分的要求系统通电后,自动启动液压电机。
若机床各部分在原位(工作台在钻孔工位,钻孔滑台在SQ2位置、攻丝滑台在SQ3位置),液压系统的压力符合要求,压力继电器动作,此时原位指示灯亮。
把要加工的零件放在工作台上,按下启动按钮,夹紧工件的电磁阀接通,夹具由液压系统控制着将工件夹紧,当SQ4动作后,说明工件被夹具夹紧,与此同时控制凸轮的电动机开始动作。
钻孔的动力头电动机启动运转,且由于控制凸轮的电动机运转,用凸轮控制使钻孔滑台前移的液压阀,来进行工件的钻孔加工。
当钻孔滑台运动到SQ5时,钻孔滑台自动退回原位,到SQ2时停止后退,同时钻孔动力头的电机停止。
等到钻孔滑台到达SQ2位置后,控制工作台向右移动的电磁阀得电,液压系统控制工作台向右移动,当工作台运动到攻丝工位SQ6的位置时,限位开关工作,停止工作台向右运动。
攻丝的动力头电机开始正转,与此同时凸轮与液压系统控制攻丝滑台向前移动,开始给零件进行攻丝,当攻丝滑台运动到SQ7的位置时,限位开关动作,制动电磁阀DL得电,攻丝的动力头开始制动,秒后控制攻丝动力头的电机开始反转,此时控制凸轮与液压系统控制攻丝滑台自动后退。
攻丝滑台退回到原来的位置SQ3时,凸轮正好运动一个周,控制凸轮转动的电机停转,同时用来攻丝的动力头电机停止,延时3秒后控制工作台向左移动的电磁阀得电,工作台开始向左运动,当运动到钻孔工位SQ1的位置停止左移。
同时放松使工件放松的电磁阀通电,夹具开始放松工件,当放松限位SQ8动作后,停止放松,系统回到原位,此时原位指示灯亮,取下工件,完成了整个加工的过程。
在加工过程中要启动冷却泵电机,供给冷却液。
论文的主要工作(1)对两工位钻孔攻丝组合机床的电气控制系统进行总体方案设计; (2)设计 P LC 的外部硬件接线图;(3)研究顺序控制设计法在 P LC 程序设计中的应用;(4)根据两工位钻孔攻丝组合机床的工艺流程,设计工作台、刀具、滑台运行和控制梯形图;(5)对该机床的调试进行简要的概述。
第二章 PLC及组合机床控制系统介绍在设计控制系统的总体方案时,要兼顾全局。
既要使系统工作可靠稳定,又要提高系统的性价比。
本章的重点为两工位钻孔攻丝组合机床选取控制系统的方案,这要结合其控制历程及其加工工艺综合考虑。