天文导航基础(二)
天文导航概述
p
地面真地平 地心真地平
A ht’ ht 90o-ht PG ht
ht=ht’+p
天文船位圆: 圆心:天体地理位置PG 半径:90o-ht
第二节 天文导航主要内容
➢ 1、为了确定天体地理位置PG:天球坐标 ➢ 2、天体在天球坐标系中的位置变化是有规律的:天体视
运动 ➢ 3、天体位置随时间变化:精确时间(时间系统)对应精
航海学简介
航海学(Navigation)
研究有关船舶在海上航行的航线选择与 设计、船位的测定和各种条件下的航行方 法等重要问题,为船舶安全、经济航行提 供保障。
航海学主要研究内容
航线拟定 确定船位: 测定船位--陆标定位 (地文航海)
--天文定位 (天文航海)
--无线电定位 (电子航海)
航行方法:大洋航行、沿岸航行、狭水道航行
特殊条件下航行(雾中、冰区航行)
天 文 导航
第一章 概论
天文定位是利用天体在海上进行定位的 技术,是船舶在大洋航行时获取船位非 常重要的一种方法。
可供定位天体:恒星、太阳、月亮和行 星
第一章 概论
➢ 十九世纪Βιβλιοθήκη 页,由法国航海家圣·希勒尔 (St.Hilaire)提出的高度差法又称截距法
➢ 优点:设备简单、可靠,观测的目标是自 然天体而不受人控制,不发射任何声、光 和电波而具有隐蔽性等。
确位置 ➢ 4、为了得到天文船位圆半径:测天体高度(六分仪) ➢ 5、根据天体地理位置及天文圆半径:天文定位
谢谢欣赏
THANK YOU FOR WATCHING
➢ 缺点:受自然条件限制,不能全天候导航, 必须人工观测,计算繁琐等
第一节 天文定位基本概念
距离定位原理
天文导航
式中 r x 2 y 2 z 2 为卫星位置矢量参数
(x,y,z)卫星在惯性坐标系下X、Y、Z方向的位 置 (vx,vy,vz)卫星在惯性坐标系下X、Y、Z方向的 速度 μ是地心引力常数 J2为地球引力系数 ДFx、 ДFy 、 ДFz为地球非球形的高阶摄动、 日月摄动以及太阳光压力摄动和大气摄动 等
2,星光仰角:指从飞行器上观测到的导航恒星与
地球边缘的切线方向之间的夹角
s Υ 星光仰角
飞行器
r
Re 地球
飞行器轨道
Re sr arcsin 星光仰角Υ的表达式为: arccos r r
Re sr arccos arcsin 星光仰角Υ的表达式为: r r 其中r是卫星在地心惯性球坐标系中的位置
dx dt v x dy v y dt dz v z dt z2 dv x x 1 J Re 7.5 2 1.5 Fx 2 3 dt r r r dv y y z2 Re 3 1 J 2 7 . 5 2 1. 5 Fy r r r dt z z2 Re dv z 7. 5 2 4 . 5 Fz dt r 3 1 J 2 r r
地球卫星的轨道动力学模型为二体问题,
其天文导航系统的模型相对简单,我们 以地球卫星为例学习基于轨道动力学的 自主天文导航原理。 根据原理,自主天文导航包括三个部分: 1,建立系统的状态模型 2,建立量测模型 3,估计
1,建立系统的状态模型(状态方程)
系统状态模型即卫星轨道动力学模型
天文导航第2章 球面几何
17
天文导航原理及应用
2.2 球面三角
计算菲尔德和彼得堡之间小圆弧航 线的距离公式为:
在纬度53°23/N的圆弧周长=2πr,
其中,r = R cos AOC, AOC =
53°23´ = 53.3833°。 图中的红色弧ARB是这个圆周的一
部分,因此,
ARB = (160°.1667/360°)x2π
➢角的基本性质 1 球面三角形三角之和大于180Ο,小于540Ο。 2 球面三角形两角之和减去第三角小于180Ο。
➢边、角间的基本性质 边角存在对应关系,等边对等角;等角对等边;大边对大角。
13
天文导航原理及应用 2.3 球面三角
2.3.4 球面三角形的面积
球面S2 ( O , 1) 上球面三角形ABC 的面积为
原球面三角形与其极线三角形的关系
1 若一球面三角形是另一球面三角形的极线三角形,则这一球面三角 形也是前一球面三角形的极线三角形,即二者互为极线三角形。 2 极线三角形的边(角)与原球面三角形的角(边)互补。
12
天文导航原理及应用
2.3 球面三角
2.3.3 球面三角形的边角基本性质 ➢边的基本性质 1 球面三角形三边之和大于0Ο,小于360Ο。 2 球面三角形两边之和大于第三边,两边之差小于第三边。
cos AYB = (cos 36°.6167)2 + (sin 36°.6167)2 cos 160.1667° AYB = 71°.9663 = 71°58´ = 4318´.
因此菲尔德和彼得堡之间的大圆弧航线(黄色弧)距离是4318个海里,该
航线所需的时间为4318/500=8.636h=8h38m。
15
天文导航原理及应用
GPS基础知识二
GPS复习题1.名词解释导航:通过实时地测定运载体在途中行进时的位置和速度,引导运载体沿一定航线经济而安全地到达目的地的技术。
极移:地球自转轴相对于地球体的位置不是固定的,地极点在地球表面上的位置随时间而变化的现象称为极移。
历元:在天文学和卫星定位中,与所获取数据对应的时刻也称历元。
多路径效应: 多路径效应也称多路径误差,即接收机天线除直接收到卫星发射的信号外,还可能收到经天线周围地物一次或多次反射的卫星信号。
整周模糊度:一般是未知的,通常称为整周未知数(整周待定值或整周模糊度)周跳:gps卫星信号中断时,初始整周计数发生变化的现象。
天线相位差:卫星天线几何中心与相位中心的偏差绝对定位;在地球协议坐标系中,确定观测站相对地球质心的位置。
相对定位:在地球协议坐标系中,确定观测站与地面某一参考点之间的相对位置。
整数解:将平差计算所得的整周未知数取为相近的整数,并作为已知数代入原方程,重新解算其它待定参数。
当观测误差和外界误差(或残差)对观测值影响较小时,该方法较有效,一般应用于基线较短的相对定位中。
非整数解:如果外界误差影响较大,求解的整周未知数精度较低(误差影响大于半个波长),将其凑成正数,无助于提高解的精度。
此时,不考虑整周未知数的整数性质,平差计算所得的整周未知数,不再进行凑整和重新计算。
一般用于基线较长相对定位中大地高:某点的大地高是该点到通过该点的参考椭球的法线与参考椭球面的交点间的距离。
大地高也称为椭球高,大地高一般用符号H表示。
正高:某点的正高是该点到通过该点的铅垂线与大地水准面的交点之间的距离,正高用符号Hg表示正常高:常高系统是以似大地水准面为基准的高程系统。
某点的正常高正是该点到通过该点的铅垂线与似大地水准面的交点之间的距离,正常高用Hr表示。
高程异常:似大地水准面到参考椭球面的距离,称为高程异常,记为 。
1.简答题1简述导航技术的发展历程。
推算定位-天文导航-惯性导航-无线电导航2简述导航系统的分类并举例。
第4章 天文导航(4课时)

2 现代天文导航
2.2 常用天体敏感器(3)
1)太阳敏感器 (2)
天文导航
38
2 现代天文导航
2.2 常用天体敏感器(4)
天文导航
2)星敏感器(1) 敏感恒星的辐射并测量飞行器相对于该恒星方 位的一种光学姿态敏感器 star sensor 恒星的张角非常小,测量精度很高,是当前测 量精度最高的姿态敏感器 星光非常微弱,信号检测比较困难,需要使用 高灵敏度的图像传感器(CCD) 星敏感器是星跟踪器(star tracker) 的一部分 ,星跟踪器需要安装星敏感器才能发挥跟踪星体的 作用。 39
是航海人员所应掌握的主要导航方法之一,
同时它也是衡量航海人员基本素质的标准。
33
2 现代天文导航
天文导航
现代天文导航的定位是通过敏感器观测
天体来确定载体位置。
弹载天文导航 星载天文导航 航天器天文导航 机载天文导航 34
2 现代天文导航
2.1 航天器天文导航
天文导航
在航天器飞行过程中,那些便于用星载
1970年 美 超音速运输机 天文/惯性/多普勒组合
B2 天文/惯性 前苏联 第一代洲际弹道导弹SS-8 天文/惯性制导 目前各种导弹、精确制导炸弹 制导方式之一
29
1 概论
1.4 天文导航的军事应用(3)
卫星和宇宙飞船等的天文导航
天文导航
星体敏感器、红外地平仪和空间六分仪等设备 深空探测航天器自主导航 天文导航或惯性导航 GPS只用于深空探测航天器近地段的导航
1.1 天文航海(4)
天文导航
夫乘舟而惑者,不知东西,见斗极则悟矣。
——西汉《淮南子·齐俗训》
夫群迷乎云梦者,必须指南以知道;竝(并)
天文导航的原理及应用
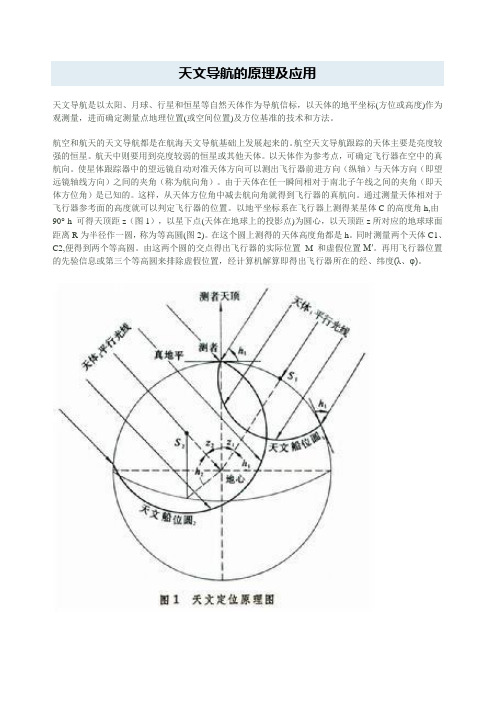
天文导航的原理及应用天文导航是以太阳、月球、行星和恒星等自然天体作为导航信标,以天体的地平坐标(方位或高度)作为观测量,进而确定测量点地理位置(或空间位置)及方位基准的技术和方法。
航空和航天的天文导航都是在航海天文导航基础上发展起来的。
航空天文导航跟踪的天体主要是亮度较强的恒星。
航天中则要用到亮度较弱的恒星或其他天体。
以天体作为参考点,可确定飞行器在空中的真航向。
使星体跟踪器中的望远镜自动对准天体方向可以测出飞行器前进方向(纵轴)与天体方向(即望远镜轴线方向)之间的夹角(称为航向角)。
由于天体在任一瞬间相对于南北子午线之间的夹角(即天体方位角)是已知的。
这样,从天体方位角中减去航向角就得到飞行器的真航向。
通过测量天体相对于飞行器参考面的高度就可以判定飞行器的位置。
以地平坐标系在飞行器上测得某星体C的高度角h,由90°-h 可得天顶距z(图1),以星下点(天体在地球上的投影点)为圆心,以天顶距z所对应的地球球面距离R为半径作一圆,称为等高圆(图2)。
在这个圆上测得的天体高度角都是h。
同时测量两个天体C1、C2,便得到两个等高圆。
由这两个圆的交点得出飞行器的实际位置M 和虚假位置M′。
再用飞行器位置的先验信息或第三个等高圆来排除虚假位置,经计算机解算即得出飞行器所在的经、纬度(λ、φ)。
天文导航的分类按星体的峰值光谱和光谱范围分,天文导航可分为星光导航和射电天文导航。
观测天体的可见光进行导航的叫星光导航,而接收天体辐射的射电信号(不可见光)进行导航的叫射电天文导航。
前者可解决高精度昼夜全球自动化导航定位,后者可克服阴雨等不良天气影响,通过探测射电信号进行全天候天文导航与定位。
根据跟踪的星体数,天文导航分为单星、双星和三星导航。
单星导航由于航向基准误差大而定位精度低,双星导航定位精度高,在选择星对时,两颗星体的方位角差越接近90°,定位精度越高。
三星导航常利用第三颗星的测量来检查前两次测量的可靠性,在航天中,则用来确定航天器在三维空间中的位置。
GPS基础知识二

GPS复习题1.名词解释导航:通过实时地测定运载体在途中行进时的位置和速度,引导运载体沿一定航线经济而安全地到达目的地的技术。
极移:地球自转轴相对于地球体的位置不是固定的,地极点在地球表面上的位置随时间而变化的现象称为极移。
历元:在天文学和卫星定位中,与所获取数据对应的时刻也称历元。
多路径效应: 多路径效应也称多路径误差,即接收机天线除直接收到卫星发射的信号外,还可能收到经天线周围地物一次或多次反射的卫星信号。
整周模糊度:一般是未知的,通常称为整周未知数(整周待定值或整周模糊度)周跳:gps卫星信号中断时,初始整周计数发生变化的现象。
天线相位差:卫星天线几何中心与相位中心的偏差绝对定位;在地球协议坐标系中,确定观测站相对地球质心的位置。
相对定位:在地球协议坐标系中,确定观测站与地面某一参考点之间的相对位置。
整数解:将平差计算所得的整周未知数取为相近的整数,并作为已知数代入原方程,重新解算其它待定参数。
当观测误差和外界误差(或残差)对观测值影响较小时,该方法较有效,一般应用于基线较短的相对定位中。
非整数解:如果外界误差影响较大,求解的整周未知数精度较低(误差影响大于半个波长),将其凑成正数,无助于提高解的精度。
此时,不考虑整周未知数的整数性质,平差计算所得的整周未知数,不再进行凑整和重新计算。
一般用于基线较长相对定位中大地高:某点的大地高是该点到通过该点的参考椭球的法线与参考椭球面的交点间的距离。
大地高也称为椭球高,大地高一般用符号H表示。
正高:某点的正高是该点到通过该点的铅垂线与大地水准面的交点之间的距离,正高用符号Hg表示正常高:常高系统是以似大地水准面为基准的高程系统。
某点的正常高正是该点到通过该点的铅垂线与似大地水准面的交点之间的距离,正常高用Hr表示。
高程异常:似大地水准面到参考椭球面的距离,称为高程异常,记为 。
1.简答题1简述导航技术的发展历程。
推算定位-天文导航-惯性导航-无线电导航2简述导航系统的分类并举例。
天文导航1
如图所示,飞行器与近天体1(例如地球) 的单位位置矢量为 re ,近天体1与3颗导航恒
星的单位方向矢量为 s1 , s 2 , s3 ,A , A , A 的补角分 别为3次观测得到的3个量测量。可得到如 下方程:
1 2 3
恒星1
圆锥1
S1
航天器 S2 A1 Y 行星 R1 O X 圆锥3 A3 L1 S3 恒星3 A2 圆锥2 恒星2
这一几何描述也可用矢量公式表达。设i为 由近天体到恒星视线的单位矢量,这一矢 量的方向可由天文年历计算出来;r为近天 体到飞行器的位置矢量,r为未知量,由矢 量点乘关系可得位置面的数学描述为:
r i r cos A
其中A为已知的观测量。
近天体/飞行器/近天体
在图2.8中V为飞行器,P1、P2为两个近 天体,在t时刻由飞行器载仪表对P1和P2 进行天文测量,通过测量可求得P1与P2 间的夹角A。由几何关系可知,这时的位 置面是以两近天体连线为轴线,旋转通过 这两点的一段圆弧而获得的超环面,这段 圆弧的中心O在P1P2连线的垂直平分线 上,圆弧半径R与两近天体之间的距离rP 以及A的关系为
天文导航
1,概述
2,天文导航位置面的概念
3,基于纯天文几何解析法的天文导航原理
4,基于轨道动力学方程的天文导航原理
§2.1 概述
天文导航:以已知准确空间位置的自然天体
为基准,通过天体测量仪器被动探测天体位 置,经解算确定测量点所在载体的导航信息。 Βιβλιοθήκη 天器天文导航是通过观测天体来测定飞行
中的航天器所在位置的技术。
系统状态方程简写为:
X (t ) f ( X , t ) w(t )
式中,状态矢量 X [ x
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3.1.4姿态参数 – 欧拉参数(姿态四元数)
欧拉参数与方向余弦矩阵的关系
2 Cba q0 q T q E3 2qq T 2q0 q 2 2 2 q0 q12 q2 q3 2 q1q2 q3 q0 2 q1q3 q2 q0
天文导航敏感器
天文航海中的测量仪器
天文导航敏感器
六分仪的测角原理
天文导航敏感器
天文导航敏感器
观测天体高度的要领
• 把天体的反射影像拉到水天线附近 • 摇摆六分仪,找天体垂直圈,等待相切。 • 记下准确相切的时间
天文导航敏感器
太阳敏感器
入射光
空间 滤波器
光谱 滤波器 光学探头部分
光电 探测器
xi
地心赤道惯性坐标系
3.1.2航天器常用坐标系
ze
Greenwich子午面
Oe
r 航天器
ye
xe
赤道面
地心赤道旋转坐标系
3.1.2航天器常用坐标系
xb xo zb
zo
ω0
地球
yb y
o
轨道坐标系和星体坐标系的示意图
3.1.3姿态参数-欧拉角
zb
za
za
za
O xb xa
ya
yb
1
0 S 1 C 0 C S C 1 0 ba C 0 S C C 0
S S C C S
C S S C ba C
3.1.6航天器姿态确定基础
滚动角 俯仰角
4 yS
单地平摆动扫描式地球敏感器测量原理
天文导航敏感器
地平跟踪式地球敏感器
天文导航敏感器
敏感器视场 地球 西
北
热电堆视场 地球 东
南 (a) (b)
辐射热平衡式地球敏感器的原理
天文导航敏感器
2.3 星敏感器
杂散光遮光罩 光学镜头 成像焦平面 电源接口
O
O ya yb xa
ya
xa xb
ya
基元旋转矩阵
3.1.3姿态参数-欧拉角
Zb Z2
Za Z1 Yb
O
Y2 Y1 Ya
Xa
Xb
X1 X 2
zxz旋转顺序
3.1.3姿态参数 - 欧拉角
方向余弦矩阵和zxz顺序欧拉角的关系
C C S C S Cba Cz Cx Cz S C C C S S S
O 基准点
zS
xS
我国生产的单圆锥扫描地球敏感器 (探头)
单圆锥扫描红外敏感器的测量坐标系
天文导航敏感器
扫描轴
扫入时刻ti
0.5HD
地中
扫出时刻 to 地球方波
瞬时视场
HS
基准面无偏差 基准 t S
HS
基准面正偏差
基准 HS
Hi Ho
运动方向
基准面负偏差 基准
单圆锥扫描式地球敏感器的工作示意图 圆锥扫描式地球敏感器的工作原理
3.1.5姿态运动学方程 ( 欧拉角)
ZXY转动次序
C ba 0 S
C 0 S
0 C S 1 S 0 C C
天文导航敏感器
太阳光
n
光电池
余弦式太阳敏感器的工作原理
天文导航敏感器
输出 透镜 敏感元件
零点 入射角
V
单轴模拟式太阳敏感器的工作原理
天文导航敏感器
双三角模拟太阳敏感器的工作原理图
我国生产的模拟太阳敏感器
天文导航敏感器
zS
测量值α:
s
Sy tan Sz
1
S
C31 C 32
C S S C C S S C C C S C
S S C S C
tg 1
cos 1 C33 tg 1
C13 C 23
3.1.3姿态参数 - 欧拉角
1 1 C11 C22 C33 2 1 q0 C12 C21 4q3 q3 q1 q2 1 C13 C31 4q3 1 C23 C32 4q3
3.1.4姿态参数 – 欧拉参数(姿态四元数)
相继角位移对应的欧拉参数 Sa
Qba
Qcb
3.1.3姿态参数 – 欧拉轴/角
e
v
a
b u
u'
欧拉轴/角坐标变换示意图
3.1.3姿态参数 – 欧拉轴/角
e
zb
za
z
yb
y x
xa xb
ya
3.1.3姿态参数 – 欧拉轴/角
相继角位移对应的欧拉轴/角
, e
1 1
Sa
Sb
3 3
, e
2 2
Sc
, e
kb
s
O
jb ib
坐标系绕单参考矢量的转动
3.1.6航天器姿态确定基础
w w*
e
3 1
u* u
2
v v*
双矢量定姿中观测矢量存在误差的情况
3.2天文导航敏感器
• 3.2.1航海测量仪器
• 3.2.2太阳敏感器
• 3.2.3地平敏感器 • 3.2.4星敏感器 • 3.2.5SS-ANARS和MAMS
0 C S C C 1 1 S S S ba C 0 C C S
1
0 C 0
C S S C ba C
3.1.5姿态运动学方程 ( 欧拉角)
ZYX转动次序
0 1 ba 0 C 0 S S S C C C
Sb
Qca
Sc
Qca mat Qba Qcb
q0 q mat Q 1 q2 q3 q1 q0 q3 q2 q2 q3 q0 q1
Qca mati Qcb Qba
q3 q0 q q2 , mati Q 1 q2 q1 q0 q3 q1 q0 q3 q2 q2 q3 q0 q1 q3 q2 q1 q0
2 q1q2 q3q0
2 2 2 q0 q12 q2 q3
2 q2 q3 q1q0
2 q1q3 q2 q0 2 q2 q3 q1q0 2 2 2 q0 q12 q2 q3
1 1 C11 C22 C33 2 1 q1 C23 C32 4q0 q0 q2 q3 1 C31 C13 4q0 1 C12 C21 4q0
• 姿态确定
为完成飞行任务,通常需要确定航天器本体坐标系相对于某 一参考坐标系或某一特定目标(如某天体)的姿态参数的过程。 姿态确定的方法基本上可分为参考矢量法、惯性测量法及统 计估计法等。
3.1.2航天器常用坐标系
黄道、赤道、春分点
3.1.2航天器常用坐标系
zi
飞行器
春分点方向
Oe
r
yi
赤道面
yS
S
xS
单轴太阳模拟敏感器的测量模型
天文导航敏感器
太阳光线和 狭缝组成的 平面
zS
太阳方向
s
太阳光 光线 码盘
光电池
编码式太阳敏感器的测量模型
我国生产的编码式太阳敏感器(探头)
天文导航敏感器
光刻狭缝
太阳像中心元
光零位元 h
第一亚元 CCD光敏面
XS X0
CCD太阳敏感器的工作几何模型
天文导航敏感器
天文导航基础
第三章
天文导航敏感器
3.1.1姿态和姿态确定
• 姿态
航天器的姿态是指飞行器绕质心旋转运动的参量,常用其固 联的体坐标系相对某参考坐标系的方位或指向来描述。姿态运动 学研究旋转运动变量的自身性质,而不涉及产生运动的原因 姿态参数有多种描述形式,包括方向余弦矩阵、欧拉轴/角、 欧拉四元数和欧拉角等
tan 1
C21 C22
sin 1 C23
C13 tan C 33
1
3.1.3姿态参数 - 欧拉角
3. 方向余弦矩阵和zyx顺序的欧拉角的关系
C C Czyx , , Cx C y C z C S S S C S S C S C C S C C S S S S S C S S S S C C C
3 1 2 1 2 cos cos cos sin sin cos 2 2 2 2 2
1 e3 sin 3 2 1 2 1 2 1 2 e1 sin 2 cos 2 e2 cos 2 sin 2 e1 e2 sin 2 sin 2
1 1 C11 C22 C33 2 1 q2 C12 C21 4q1 q1 1 q3 C13 C31 4q1 1 q0 C23 C32 4q1
1 1 C11 C22 C33 2 1 q3 C23 C32 4q2 q2 q0 q1 1 C31 C13 4q2 1 C12 C21 4q2
五眼式0-1太阳敏感器视场分布
五眼式0-1太阳敏感器(探头)