基于ProE和Adams的无碳小车S型路径优化
S型无碳小车的设计与优化
S型无碳小车的设计与优化作者:李淑萍柴小云李晨来源:《中国科技纵横》2019年第14期摘要:根据全国大学生工程训练综合能力竞赛命题文件指导,通过文献查询与自发探索设计制作出了能实现预定功能的小车。
依靠计算与软件辅助,验证与改进了小车各结构的设计。
最终经过调试,使小车平稳运行。
关键词:无碳小车;结构设计;连杆机构;微调机构中图分类号:TH122 文献标识码:A 文章编号:1671-2064(2019)14-0081-020 引言伴随着人类对自然环境无止境的开采,随踵而来的环境恶化问题也日益加重。
经济发展是无止境的,但人类赖以生存的生态系统却是无法再生的。
全球气候变化、能源消耗和生态破坏等现象现在都是全人类无法规避的问题。
近年来,低碳生活的理念应运而生,开始在全球大规模地传播,以期望引起大家对环境的重视,改善我们的生态系统。
无碳小车就是这一波潮流中的号召者之一。
它所要实现的就是在除了自身重力外不依靠其他任何能量就能自主完成绕障行走的功能。
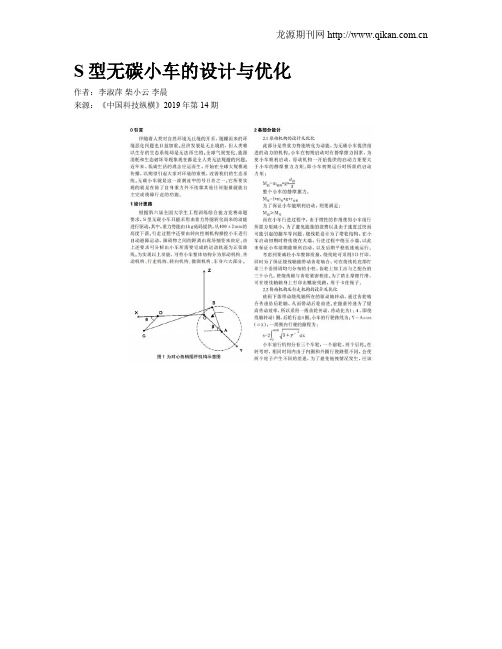
1 设计思路根据第六届全国大学生工程训练综合能力竞赛命题要求,S型无碳小车只能采用由重力势能转化而来的动能进行驱动,其中,重力势能由1kg砝码提供,从400±2mm的高度下落。
行走过程中还要由转向控制机构操控小车进行自动避障运动,障碍物之间的距离由现场抽签来决定。
由上述要求可分析出小车所需要完成的运动轨迹为正弦曲线。
为实现以上功能,可将小车整体结构分为原动机构、传动机构、行走机构、转向机构、微调机构、车身六大部分。
2 各部分设计2.1 原动机构的设计及优化此部分是将重力势能转化为动能,为无碳小车提供前进的动力的机构。
小车在初期启动时有静摩擦力因素,为使小车顺利启动,原动机构一开始提供的启动力矩要大于小车的静摩擦力力矩。
即小车初期运行时所需的启动力矩:而在小车行进过程中,由于惯性的作用使得小车前行所需力矩减小,为了避免能量的浪费以及由于速度过快而可能引起的翻车等问题,绕线轮设计为了塔轮结构,在小车启动初期时将线绕在大端,行进过程中绕至小端。
浅谈“S形”无碳小车的轨迹调试
浅谈“S形”无碳小车的轨迹调试“S形”无碳小车的轨迹调试是指对无碳小车进行动态测试和参数调整,以实现预定的S形轨迹。
本文将从以下几个方面进行浅谈。
一、前期准备在开始轨迹调试之前,需要将无碳小车的机构、传感器和控制器等部分进行安装和调试。
确保其能够准确和稳定地运行,并正常地接收和处理各种数据。
二、实验环境在进行轨迹调试时,需要找一个平整、宽敞且无干扰性的实验环境,如实验室、室外平地等。
在进行轨迹调试之前,需要将环境中的杂物清理干净,以免对无碳小车的运行造成干扰。
三、轨迹设计在进行轨迹调试之前,需要根据实际的需求设计出预定的S形轨迹,并确定其长度、宽度、曲率等参数。
对于初学者来说,可以选择较为简单的S形轨迹进行测试和调整。
在轨迹设计之后,需要将其转换为机器人运动控制所需的数据格式,以便后续的编程。
四、运动学模型为了实现预定的S形轨迹,需要建立无碳小车的运动学模型。
在运动学模型中,需要考虑无碳小车的物理结构、传动机构、惯性和阻尼等因素的影响。
通过运动学模型,可以计算出无碳小车在不同条件下的运动状态,如位置、速度、加速度、转角等参数,并根据实际情况进行参数调整。
五、控制算法为了实现预定的S形轨迹,需要选择一种适合的控制算法。
在控制算法中,需要考虑无碳小车的运动状态和环境变化等因素的影响。
通过控制算法,可以实现对无碳小车的控制和调节,以达到预定的目标。
六、调试过程在进行轨迹调试过程中,需要不断地进行测试和调整。
首先,需要对无碳小车进行静态测试,检查其各个部分是否安装稳定,传感器是否准确,控制器是否正常工作等。
然后,需要对无碳小车进行动态测试,测试其运动状态和参数,并对其进行调整。
在调整过程中,可以通过手动控制和程序调节两种方法,对无碳小车的参数进行调整,以实现预定的S形轨迹。
七、总结通过轨迹调试过程,可以深入了解无碳小车的运动学特性和控制算法,并实现预定的S形轨迹。
在调试过程中,需要认真分析各种数据和参数,并进行适当的调整。
无碳小车轨迹建模与参数优化
无碳小车轨迹建模与参数优化作者:卞玉帅陈正强晁兴旺来源:《科技视界》2013年第33期【摘要】无碳小车以“S”形轨迹绕桩运行,轨迹曲线的平滑度和形状直接决定了小车的稳定性和绕桩数量。
通过建立数学模型,对无碳小车的运动过程进行分析,对模型中各参数进行不断地调整,最终获得了具体的分析结果和直观的轨迹函数图像,从而确定了影响小车运行轨迹的各参数最优值。
为无碳小车的调试和优化奠定了基础。
【关键词】无碳小车;轨迹曲线;数学模型无碳小车行走及转向的能量全部由给定重力势能转换而来,小车绕桩数量越多,前进距离越长,性能越好。
因此对无碳小车运动规律的研究对提高其性能具有重要意义。
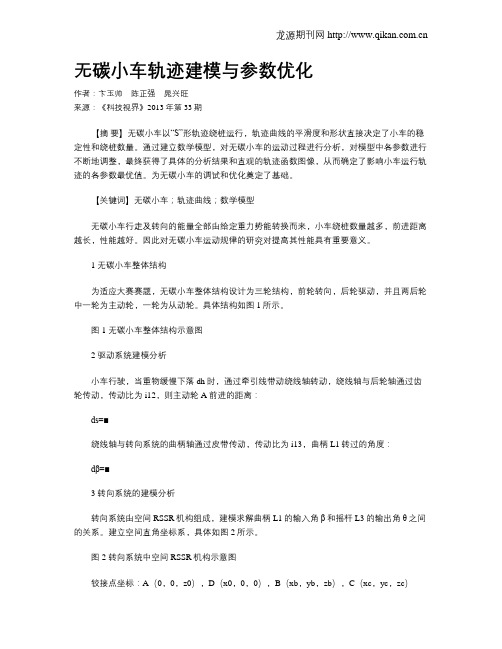
1 无碳小车整体结构为适应大赛赛题,无碳小车整体结构设计为三轮结构,前轮转向,后轮驱动,并且两后轮中一轮为主动轮,一轮为从动轮。
具体结构如图1所示。
图1 无碳小车整体结构示意图2 驱动系统建模分析小车行驶,当重物缓慢下落dh时,通过牵引线带动绕线轴转动,绕线轴与后轮轴通过齿轮传动,传动比为i12,则主动轮A前进的距离:ds=■绕线轴与转向系统的曲柄轴通过皮带传动,传动比为i13,曲柄L1转过的角度:dβ=■3 转向系统的建模分析转向系统由空间RSSR机构组成,建模求解曲柄L1的输入角β和摇杆L3的输出角θ之间的关系。
建立空间直角坐标系,具体如图2所示。
图2 转向系统中空间RSSR机构示意图铰接点坐标:A(0,0,z0),D(x0,0,0),B(xb,yb,zb),C(xc,yc,zc)设计时特别要求:zc = z0,并且当曲柄L1绕OZ轴转动到YOZ平面内时,摇杆L3与OZ 轴保持平行。
由几何原理得出:l22=(xb-xc)2+ (yb-yc)2+(zb-zc)2 (1)根据三角关系可得:x■y■z■=l■cosβl■sinβl■ (2)x■y■z■=x■+l■cosθ0l■sinθ (3)将式(2)(3)代入式(1)得:l12-l22+2l32+x02-2x0 l1cosβ=(2l1l3cosβ-2x0 l3)cosθ+2l32sinθ设A=2l1l3cosβ-2x0 l3B=2l32C=-(l12-l22+2l32+x02-2x0 l1cosβ)则原式可写为:Acosθ+Bsinθ+C=0求解上式得:θ=arcsin■-arcos■4 小车行走轨迹4.1 A轮行走轨迹无碳小车前轮为转向轮,A轮为主动轮,B轮为从动轮。
浅谈“S形”无碳小车的轨迹调试

浅谈“S形”无碳小车的轨迹调试“S形”无碳小车是一种无人驾驶的电动汽车,具有自动导航和轨迹控制功能。
在实际应用中,调试小车的轨迹是非常重要的,可以保障小车在行驶过程中的安全性和稳定性。
下面就浅谈一下“S形”无碳小车的轨迹调试。
在进行轨迹调试之前,需要对小车进行一些准备工作。
首先是确保小车的陀螺仪和加速度计等传感器的正常工作。
这些传感器可以帮助小车进行姿态感知和运动状态的监测,对于轨迹调试非常重要。
需要对小车的电机和轮子进行校准,确保小车在行驶时能够保持直线运动。
接下来,可以进行轨迹调试的具体步骤。
首先是选择合适的测试场地。
场地的平整度和路面的摩擦系数对于小车的轨迹调试有很大的影响,因此需要选择一块平坦且摩擦系数适中的地方进行测试。
测试场地最好是一个封闭的区域,这样可以减少外界干扰。
在测试之前,需要对小车进行一些初始设置。
首先是设置小车的初始位置和初始速度。
在“S形”轨迹调试中,小车的初始位置通常是居中且静止的。
初始速度可以根据具体情况来设置,一般选择一个较小的速度来进行调试。
开始进行轨迹调试之后,可以通过调整小车的操控参数来实现理想的轨迹。
常见的操控参数包括车体的横向加速度和转向角速度等。
通过调整这些参数,可以让小车在行驶过程中保持平稳且准确的轨迹。
在调试过程中,可以通过观察小车的行驶情况和实时数据来判断调试参数是否合理。
调试过程中可能会遇到一些问题,比如小车偏离轨迹、转弯时失稳等。
针对这些问题,可以通过调整操控参数和传感器数据的反馈来解决。
如果小车偏离轨迹,可以增加车体的横向加速度来纠正偏离,如果转弯时失稳,可以减小转弯时的速度来增加稳定性。
进行轨迹调试时要注意安全。
在测试过程中,需要确保周围没有障碍物和行人,并做好安全预防措施。
小车的速度和角度调整要逐步进行,避免突然变化导致控制不力。
轨迹调试是保障“S形”无碳小车安全稳定行驶的关键环节。
通过对小车传感器和电机的校准,选择合适的测试场地,并通过调整操控参数来实现理想的轨迹。
浅谈“S形”无碳小车的轨迹调试
浅谈“S形”无碳小车的轨迹调试随着环保意识的日益增强,无碳出行已成为现代社会的热点话题,无碳小车作为环保出行的一种新型选择,受到了越来越多人的关注和青睐。
作为无碳小车中的佼佼者,S形无碳小车因其优异的性能和独特的设计备受消费者青睐。
S形无碳小车的轨迹调试是非常重要的一环,它直接影响了无碳小车的稳定性和行驶效果。
今天,我们就来浅谈一下S形无碳小车的轨迹调试。
我们需要明确一点:什么是S形无碳小车的轨迹调试?简单来说,轨迹调试就是通过调整车辆的悬挂系统和车轮的位置,使车辆在行驶过程中保持稳定的状态,同时确保车轮与地面的接触面积最大化,以提高行驶的安全性和舒适性。
在进行S形无碳小车的轨迹调试时,需要特别关注以下几个方面:轮胎的调整是轨迹调试的重中之重。
轮胎的状态直接关系到车辆的行驶稳定性和操控性,因此在轨迹调试时,要确保轮胎的气压适中,轮胎花纹清晰,轮胎的磨损程度均匀。
还要根据车辆的实际使用情况来调整轮胎的对称度和接地面积,以保证车辆在行驶过程中的稳定性。
车身的重心调整也是轨迹调试的重要环节。
S形无碳小车的设计独特,因此在调整车身的重心时要特别小心。
通过调整悬挂系统和车身高度,可以使车身的重心更加稳定,从而提高车辆的转弯性能和抗侧倾能力。
还需要注意车轮的对称性和润滑性。
车轮的对称性对车辆的轨迹调试至关重要,只有在保证车轮的对称性的情况下,车辆才能保持稳定的行驶状态。
良好的润滑性也可以减少车轮与地面的摩擦力,提高车辆的行驶效率。
在进行S形无碳小车的轨迹调试时,还需要考虑车辆的操控性和行驶安全性。
通过对车辆的转向系统和制动系统进行调试,可以提高车辆的操控性和行驶安全性。
还可以通过调整车辆的行驶轨迹,使车辆在行驶过程中更加稳定,减少翻车和侧翻的风险。
S形无碳小车的轨迹调试是非常重要的,它直接关系到车辆的行驶稳定性和操控性。
通过合理调试,可以提高车辆的行驶安全性和舒适性,为用户带来更好的出行体验。
希望通过本文的浅谈,能对S形无碳小车的轨迹调试有更深入的了解。
s型无碳小车的设计说明

s 型无碳小车的设计说明1.小车行走轨迹的规划和计算小车的行走轨迹为正弦型曲线,最小振幅为200mm ,周期为2000mm 。
其运动轨迹为 :后轮的参数设计:设计目标:小车行走水平距离S′=60m ,理论行走时间t 总=10min小车行走路线为正弦曲线,曲线振幅为200mm ,一个周期的水平距离为2000mm ,所以可得出曲线函数式:x y πcos 2.0= 计算曲线路程m x s 4.2)sin 2.0(11221=-+⨯=⎰ππ周期数n=2s '=30 所以总路程m s n s 72='= 周期T=t n =60030=20s 车身速度1 2.4/0.12/20s v m s m s t === 重物下降速度00.41//6001500h v m s m s t === 设绕绳轮半径为0r ,则02r n h π=所以00010.314/15000.0021231v w rad s r ===⨯ 又10v v = 10w w =设偏心轮偏心距为e ,半径为1r 前轮半径为2r ,后轮半径为r 5, 大带轮半径为r 3,小带轮半径为r 4 带轮传动比为i=3 则03w w = 01w w =4350.942/w iw w rad s ===05553550v v w r iw r i r v r ==== 所以050127.386r vr mmiv ==则后轮的直径为127.4mm,前轮直径60mm ,车底板总长180mm ,宽170mm带轮的参数设计已知功率W mgv P 15010== 转速min /926041r w n ==π1、确定计算功率ca P查得工作情况系数0.1=A K 故W P K P A ca 150115011*=⨯== 2、 选择带型选用Y 型带 3、 确定带轮的基准直径,并验算带速v 1)初选小带轮的基准直径。
由表查得取小带轮的基准直径mm d d 251= 2)验算带速s m n d v d /011775.010006092514.310006011=⨯⨯⨯=⨯=π3)计算大带轮的基准直径mm id d d d 7525312=⨯== 根据表查得,圆整为mm d d 712=4、 确定带的中心距a 和基准长度Ld1)根据式(8-20) )(2)(7.021021d d d d d d a d d +≤≤+ 1922.670≤≤a 2)初定中心距 mm a 1300=3)由式(8-22)计算带所需的基准长度mmmm a d d d d a L d d d d d 4151304)2571()2571(213024)()(22202122100≈⎥⎦⎤⎢⎣⎡⨯-+++⨯=-+++≈ππ 由表8-2选带的基准长度mm L d 450=4)按式(8-23)计算实际中心距amm L L a a d d5.14720=-+= 5、 验算小带轮上的包角oo o ood d oa d d 907.1591303.57)2571(1803.57)(180121≥=--=--=α6、 计算带上的有效拉力Fe由1000*v Fe P =得N N vPFe 5662.0011775.0101501100010003=⨯⨯==- 阶梯轴的参数设计设重物在刚开始下降的瞬间加速下降的距离为0h设绕线一圈,则r h '=π20(r '为加速绕线处主动轴半径)...................(1) 又在这一过程中022ah v =...........................................(2) 0F mg ma -=........................................(3) Me r F ='0...........................................(4) 其中23310123.2105.35531.0--⨯=⨯⨯=⨯=r Fe Me 由以上四式可解出mmr mmh 124.233872.130='=转向机构和可调节机构的选取转向机构:本机构设计采用偏心轮+连杆+摇杆,其单位面积所受压力比较小而且接触面便于润滑,摩擦小制造方便能获得较高的精度。
基于S型避障无碳小车车身结构设计的创新和优化

基于 S 型避障无碳小车车身结构设计的创新和优化摘要:无碳小车是一种依靠重力势能驱动的自动避障的机构驱动转向机械小车。
S型无碳小车对与机构的传动精度要求高。
在设计过程中预留了微调机构,在装配后设置参数后微量调整。
那么简化微调机构提高微调效率显得尤为重要。
本文主要就是对转向机构中的微调机构的创新与优化。
关键词:轻便、结构优化、微调机构。
一、设计方案无碳小车大体可以从两个角度车出发,一是无碳,二是前进且自动转向功能。
首先要提出的是无碳,即以重物悬挂高处通过重物下降的势能驱动小车前进,如今都以绳轮机构为主。
本文绳轮机构只就适应车体布置设置了合适参数,通过小车三维建模体现,不做详述。
其次则是运动。
动力机构设计为齿轮机构,将重力势能转化为驱动力,需设置合理传动比与中心距。
三是研究小车的自控功能如何实现,在研究现存机构与其参数的根据下,参阅相关设计资料,结合最基本的空间四杆机构理论,设计构件参数及其运动形式。
即确定运动副的类型与布置位置。
四是设置一个适用此转向机构的微调机构。
五是机构的合理布置。
机构的设计应首先本着精确执行其功能的原则,其次因无碳小车需轻量化,所以尽量减轻各构件重量,精简构件结构形状。
应当强调的是应尽量避免低副摩擦的现象,低副摩擦,尤其是在组成低副的构件受较大垂直摩擦面线性载荷和方向变化的动载荷时,会造成剧大的摩擦热量损失。
通过多次的软件数据分析和建模以及仿真设计出了符合要求的无碳小车。
二、整体设计本次设计采用以转向轮(前轮)、差速轮(后轮1)、驱动轮(后轮2)为三个顶点绘制三角形。
通过MATLAB建立三条轨迹曲线来模仿小车的运行轨迹,通过设置桩距的方法来合理设置车宽幅与车总长确保车子在运行过程中不会触碰定点桩。
在确定了合理的车身长宽之后来设计机构的布置形式与参数大小,通过Solidworks建立三维模型,代入所设计参数研究是否合理。
将不合理的车长车宽在带回轨迹曲线进行完善。
最终达到合理可行的状态。
浅谈“S形”无碳小车的轨迹调试
浅谈“S形”无碳小车的轨迹调试“S形”无碳小车是一种基于无碳轨道技术的新型交通工具,其特点是能够在特定的轨道上进行高速行驶,并且能够实现自主控制和自动导航。
在实际运营过程中,由于各种因素的影响,无碳小车的轨迹可能存在一些偏差,需要进行调试和优化,以保证其运行的稳定性和安全性。
本文将从设计原理、调试方法和效果评估三个方面对“S形”无碳小车的轨迹进行浅谈。
设计原理是无碳小车轨迹调试的基础。
无碳小车的设计原理是利用轨道上的磁场进行悬浮和推进,通过电磁力来实现小车的运动。
调试过程中需要根据原理进行参数设置,包括磁力和速度的控制,以及轨道的设计和布置。
在设计原理的基础上,可以根据实际情况进行调试和优化。
调试方法是无碳小车轨迹调试的关键。
调试方法需要根据实际情况进行选择和应用,常用的方法包括试错法、仿真模拟和实验验证等。
试错法是通过多次调试和实验,不断调整参数和修正错误,逐步优化小车的轨迹。
仿真模拟是利用计算机软件进行虚拟实验,通过模拟运行情况来调试轨迹。
实验验证是在实际运行环境中进行调试,通过观察和测试小车的运动轨迹来进行调整和优化。
调试方法需要根据实际情况进行选择和结合,以提高调试的效率和准确性。
效果评估是无碳小车轨迹调试的重要环节。
调试的目的是为了使无碳小车能够在轨道上稳定行驶,达到预期的效果。
需要对调试的结果进行评估和分析,包括小车的运行速度、悬浮稳定性和轨迹精度等方面。
评估的方法可以通过观察实际运行情况、测量数据和模拟分析等方式进行。
评估结果可以用于判断调试的效果,并进行进一步的调整和优化。
“S形”无碳小车的轨迹调试是一个复杂而关键的过程,需要结合设计原理、调试方法和效果评估进行。
通过科学合理的调试方法和有效的评估手段,可以使无碳小车的轨迹达到预期的目标,实现安全稳定地行驶。
相信随着技术的不断进步和完善,“S形”无碳小车将会在未来的交通出行中发挥越来越重要的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于Pro/E和Adams的无碳小车S型路径优化任务书1.设计的主要任务及目标1.1主要任务借助pro/e、Adams等软件,利用计算机辅助设计的手段完成无碳小车整体结构设计,完成小车的传动系统与转向系统的设计,完成小车的虚拟设计仿真以及对小车进行S路径优化分析。
1.2 目标完成符合比赛要求的无碳小车的整车设计,通过pro/e与Adams联合仿真的手段找到符合比赛要求的小车的实际轨迹,采用理论与实际轨迹对比的方法设计小车转向机构,使得小车在Adams虚拟软件下顺利完成比赛要求,并通过Adams模拟小车的实际运动情况,得到小车的速度变化曲线。
将小车模型导入Adams中对小车进行路径优化分析,完成小车行驶S字型路径的仿真操作,并显示出路径轨迹图像。
2.设计的基本要求和内容2.1基本要求设计符合比赛要求的无碳小车的理论运行轨迹,完成小车在理论运行轨迹下的转向机构、传动机构、原动机构的设计,完成无碳小车模型的建立。
2.2内容结合第二、三届全国大学生工程训练综合能力竞赛命题要求,采用计算机辅助设计的手段完成无碳小车的整车设计,设计主要完成以下工作(1)了解并掌握Pro/E建模与Adams动力学仿真分析软件应用,掌握小车转向机构设计与分析;(2)转向机构的设计:采用偏心轮机构实现前轮的转向及各参数的确定;行走机构的设计:完成车轮结构的设计与尺寸参数的确定。
(3)完成小车设计对小车建模并仿真优化S字型路径。
3.主要参考文献[1] 孙桓,陈作模.机械原理.7版.北京:高等教育出版社,2010[2] 陆凤仪,钟守炎.机械设计.2版.北京:机械工业出版社,2011[3] 李增刚.ADAMS入门详解与实例.北京:国防工业出版社,2006[4] 汤修映,肖丹,刘岭,刘川,毛恩荣.ADAMS、Pro/E和ANSYS间数据的自动传输技术.农业机械学报,2011,42(6):193-198[5] 范云霄,尤振环.基于ADAMS的凸轮设计.煤矿机械,2011(2)[6] 刘飞,张大伟.基于Pro/E和Adams的共轭凸轮设计与仿真.机械研究与应用,2011(5)[7] 徐岩.基于工程训练大赛作品无碳小车进行实物仿真的研究.现代企业教育, 2011(8)[8] 白雪,唐鹏达.机械传动无碳小车的设计构想.工业设计, 2011(8)[9] 周炜,易建军,郑建荣.ADAMS软件中绳索类物体的一种建模方法.现代制造工程,2004(5)[10] Ji huiling, Li lixin. Simulation anslysis and optimization design of front suspension based on ADAMS[J]. Mechanika,2012(3)[11] Bai Xianglin, Li Haoyu, Liu Faxian. Dynamic simulation of auto-centralizer for horizontal well traction robot based on ADAMS[J]. Petroleum Exploration and Development online,2010(37)4.进度安排基于Pro/E和Adams的无碳小车S型路径优化摘要:本次设计是利用Pro/E和Adams的结合应用来对无碳小车进行建模,仿真,以及S型路径的优化分析。
Pro/E软件的建模功能强大而仿真分析方面的能力较弱;相比之下Adams软件的建模能力较弱,而仿真和优化分析的能力强大。
所以我们以Pro/E 对S路径的无碳小车进行建模,再用Adams软件进行路径的优化分析。
利用Pro/E对无碳小车的结构进行设计建模、约束并仿真,仿真成功之后将机构以x-t格式进行保存副本,并导入Adams软件中。
利用Adams对小车模型重新添加约束,运动仿真,追踪路径轨迹,进行路径优化分析。
本设计的重点为利用Adams软件对无碳小车实现动力学仿真和S型路径的优化分析。
关键词:无碳小车,Pro/E,Adams,仿真分析,路径优化Based on Pro/E and Adams carbon-free car s-shaped pathoptimizationAbstracts: This design is the use of Pro/E and Adams, a combination of applied to carbon-free car modeling, simulation. And the analysis of the path optimization. Powerful function of Pro/E software modeling, simulation analysis ability is weak, compared with Adams software modeling ability is weak, and simulation and optimization analysis ability is strong. So we with Pro/E to S path of carbon-free car model, path optimization analysis with Adams software. Using Pro/E structure of carbon-free car design modeling, constraints, and the simulation, the simulation after successful institutions to x - t format to save a copy, and import the Adams software. Using Adams to add restrictions on car model, motion simulation, tracking path trajectory, path optimization analysis.This design using the Adams software to carbon-free car key so as to realize the dynamic simulation and optimization analysis of s-shaped path.KEYWORDS:carbon-free car, Pro/E, Adams, the simulation analysis, path optimization.目录1前言 (1)1.1课题研究背景及其意义 (1)1.2 第三届全国大学生工程训练综合能力竞赛命题 (2)1.2.1本届竞赛主题: (2)1.2.2竞赛命题:以重力势能驱动的具有方向控制功能的自行小车 (2)1.2.3竞赛项目: (3)1.3小车的设计方法 (4)2.小车的理论方案设及其概述 (5)2.1 车架设计 (5)2.1.1 车架外形尺寸设计 (5)2.1.2 车架结构形式的选择及其车架三维图 (5)2.2小车行走轨迹设计 (6)2.2.1 小车行走轨迹确定 (6)2.2.2 处理行走轨迹的绘制 (7)2.3原动机构设计 (8)2.4 传动系统设计概述 (10)2.4.1转动方案的确定 (10)2.4.2 传动比的确定 (10)2.4.3 齿轮参数确定 (10)2.5 转向系统设计 (11)2.5.1 转向机构介绍 (11)2.5.2 转向机构的选择 (14)2.5.3 偏心轮结构设计 (14)2.6行走机构设计 (17)2.7 无碳小车整体方案确定 (18)3.用Pro/Engineer进行建模造型及其仿真分析 (19)3.1 Pro/Engineer操作软件的简介 (19)3.2 小车零部件的模型以及装配 (20)3.2.1原动机构的装配 (20)3.2.2 传动机构的装配设计 (21)3.2.3转向系统的装配概述 (22)3.2.4 整车装配设计 (23)4基于ADAMS的无碳小车动力学仿真 (28)4.1 ADAMS的简介及其功能 (28)4.2 ADAMS/View的安装 (29)4.3 Pro/e与Adams的无缝对接 (31)4.4小车仿真 (39)4.5 小车仿真轨迹后处理 (39)结论 (43)参考文献 (46)致谢 (48)1前言1.1课题研究背景及其意义随着人们节能环保意识的提升,无碳的理念也越来越被人们提上研究的课题。
更洁净、更环保、更节能、更高效的理念也深入人心。
本小车是对“无碳”理念的探索与开发,对未来“无碳”的憧憬。
小车构思巧妙,在完成设计的要求下充分考虑了外观和成本等问题,方便以后的扩展和进一步的开发。
并能满足大部分初高中及大学学生对机械知识实践的实验与了解。
对激发青少年对机械构造的热情有深远的影响。
全国大学生工程训练综合能力竞赛是公益性的大学生科技创新竞技活动,是有较大影响力的国家级大学生科技创新竞赛,是教育部、财政部资助的大学生竞赛项目,目的是加强学生创新能力和实践能力培养,提高本科教育水平和人才培养质量。
为开办此项竞赛,经教育部高等教育司批准,专门成立了全国大学生工程训练综合能力竞赛组织委员会和专家委员会。
竞赛组委会秘书处设在大连理工大学。
每两年一届。
全国大学生工程训练综合能力竞赛秉承“竞赛为人才培养服务,竞赛为教育质量助力,竞赛为创新教育引路”的宗旨。
竞赛活动面向全国各类本科院校在校大学生,实行校、省(或多省联合形成的区域)、全国三级竞赛制度。
省级竞赛或区域竞赛的优胜者,经省或区域教育厅核准,报名推荐参加全国决赛。
竞赛性质:这是一项面向全国在校本科生开展科技创新工程实践活动的全国性大赛。
竞赛宗旨:竞赛为人才培养服务,竞赛为教育质量助力,竞赛为创业就业引路。
竞赛方针:基于理论、注重创新,突出能力,强化实践。
大赛的指导思想是“重在实践,鼓励创新,突出综合,强调能力”,以提高大学生的实践动手能力、科技创新能力和团队精神。
图 1.1 第三届全国大学生工程训练综合能力竞赛1.2 第三届全国大学生工程训练综合能力竞赛命题1.2.1本届竞赛主题:本届竞赛主题为“无碳小车越障竞赛”。
要求经过一定的前期准备后,在比赛现场完成一套符合本命题要求的可运行装置,并进行现场竞争性运行考核。
每个参赛作品要提交相关的设计、工艺、成本分析和工程管理4项报告。
1.2.2竞赛命题:以重力势能驱动的具有方向控制功能的自行小车设计一种小车,驱动其行走及转向的能量是根据能量转换原理,由给定重力势能转换来的。
给定重力势能为4焦耳(取g=10m/s2),竞赛时统一用质量为1Kg的重块(¢50×65 mm,普通碳钢)铅垂下降来获得,落差500±2mm,重块落下后,须被小车承载并同小车一起运动,不允许从小车上掉落。