滑键联接-雅安职业技术学院
键花键无键联接销连接课件

圆柱销连接
总结词
圆柱销连接是一种常见的销连接方式,其结构简单、易于安装和拆卸。
详细描述
圆柱销连接通常由圆柱形的销和孔组成,通过将销插入孔中实现连接。这种连 接方式适用于轻载、低速和间歇性工作的场合,如家具连接是一种具有自锁功能的销连接方式,其结构紧凑、能承受较大的载荷 。
耐磨性
对于需要频繁使用的联接销,应选择耐磨性 较好的材料,以提高使用寿命。
耐腐蚀性
在可能接触腐蚀性介质的环境中,应选择耐 腐蚀性强的材料。
成本与可加工性
在满足性能要求的前提下,应尽量选择成本 较低且易于加工的材料。
尺寸确定
根据使用需求确定尺寸
根据具体的使用场景和需求,如传递 扭矩的大小、联接销的长度等,来确 定联接销的尺寸。
增材制造
利用增材制造技术,如3D 打印,实现复杂结构的高 精度制造,降低生产成本 。
智能材料
研究和发展智能材料,提 高产品的自适应性和耐用 性,满足更广泛的应用需 求。
应用拓展
航空航天
医疗器械
在航空航天领域,键花键无键联接销 连接技术将应用于更高级别的零部件 和结构中,提高安全性和可靠性。
在医疗器械领域,该技术将应用于人 工关节、牙科植入物等高精度医疗设 备中,提高人体适应性和使用寿命。
汽车工业
在汽车工业中,该技术将应用于发动 机、变速器和底盘等关键部件,提高 性能和降低重量。
市场前景
全球市场需求
随着工业4.0和智能制造的推进,全球市场对键花键无键联接销连 接技术的需求将持续增长。
竞争格局
市场竞争将逐渐加剧,技术领先的企业将获得更多的市场份额和利 润空间。
政策支持
政府将加大对技术创新和高端装备制造业的支持力度,推动键花键 无键联接销连接技术的快速发展和应用。
雅安科学技术协会-雅安科协

附件
雅安市参加第33届四川省青少年科技创新大赛获奖名单一、青少年科技创新成果(25项)
二、青少年科技创意(6项)
三、青少年科技实践活动(8项)
四、少年儿童科学幻想绘画(13幅)
五、青少年科学影像(17项)
六、科技辅导员科技创新成果(10项)
七、专项奖(2项)
八、市级优秀组织工作者:曾蓉
九、市级优秀组织奖:雅安市科协雅安市教育局
十、优秀基层组织奖:
雨城区科协雨城区教育局名山区科协名山区教育局天全县科协天全县教育局宝兴县科协宝兴县教育局汉源县科协汉源县教育局石棉县科协石棉县教育局。
中职《机械基础》(二版)模块五 连接与紧固(栾学钢等)云天课件
可拆卸连接
螺纹连接、键连接、销连接 联轴器与离合器
不可拆卸 连接
铆接、焊接、 过盈连接、粘接
弹性连接 如:减振器
标准件 像螺纹连接等紧固件、键、销,以及密封件、滚动轴承等用量特别 大的零部件,都有制定有标准化、规格化的国家标准和图集,很多标准件都有 专业化工厂生产,在设计和制造机器时,一般都是选用,不必自行设计或制造。
P.122
螺纹连接:由内螺纹和外螺纹组成的螺旋副。
螺纹连接的特点:结构简单、紧凑,轴向力大,自锁性好,装拆方便,
类型多样。
连接螺纹
普通螺纹
粗牙螺纹 细牙螺纹
螺纹应用 种类
管螺纹
传动螺纹
梯形螺纹 方牙螺纹
锯齿螺纹
5.3 螺纹连接 一、 螺纹及主要参数
1. 螺5 GB/T 1096-2003, B型普通平键,尺寸同上,
标记为:键 B 8×7×25 GB1096-2003 , C型普通平键,尺寸同上,
标记为:键 C 8×7×25 GB1096-2003。
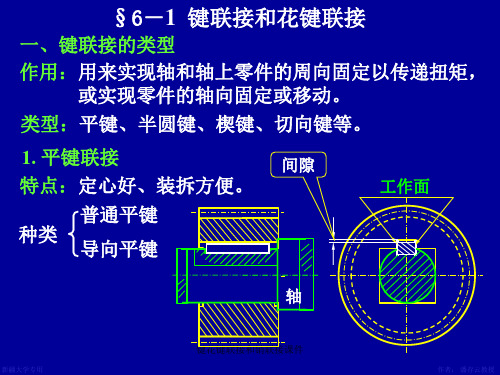
5.2 键连接与销连接 一、键连接
P.117
*2. 平键连接的选用
类型选择:键的类型应根据键联接的结构、使用特性及 工作条件来选择。
5.2 键连接与销连接 一、键连接
楔键连接的结构:键的上表面有1:100的斜度接。 楔键的工作面:上、下两平面,属于紧键连。 楔键的特点:与平键相比,传动功率大,但对中性不好。 楔键连接用途:主用于低速、对中性要求不高的场合。
P.118
5.2 键连接与销连接 二、 花键连接
P.119
花键连接:由轴上加工出的外花键与轮毂孔中加工出的内花键组成。 花键连接特点:齿数多,承载力大,定心性及导向性均好,对轴的削弱较小, 适用于载荷较大和对定心精度要求较高的联接。
0I MATE TD数控机床机电联调技术

第6期(总第223期)2020年12月机械工程与自动化MECHANICAL ENGINEERING & AUTOMATIONNo.6Dec.文章编号:1672 6413(2020)06 0166 030IMATETD櫜数控机床机电联调技术王 锐,王 刚(长春职业技术学院,吉林 长春 130033)摘要:数控机床是机电一体化设备,详细介绍了0IMATETD数控机床的机械部件和电气装置的联机调试,最终达到了优化机床性能的目的。
关键词:0IMATETD数控机床;误差补偿;机电联调中图分类号:TG659 文献标识码:櫜B吉林省教育厅“十三五”科学技术项目(JJKH20201329KJ);长春职业技术学院2019年度应用技术研究与开发项目(YY 2019B09)收稿日期:2020 07 23;修订日期:2020 10 24作者简介:王锐(1982),男,吉林长春人,讲师,硕士,主要从事数控及机电技术的科研与教学。
0 引言数控机床不仅具备高精度的机械零部件,而且还拥有安全稳定的电气控制装置。
当机械部件和电气装置安装完毕后,需要对它们进行联机调试,以便使数控机床的运动性能达到最优化[1]。
机电联调包括准备联调、初始化参数、下载梯形图程序、调试主运动、调试进给运动、机械精度检测与补偿、根据用户需求修改梯形图、试运行机床和数据备份等[2]。
1 准备联调及初始化参数准备联调实际是为了完成机床机械部件与电气控制装置的硬件对接。
首先连接进给轴伺服电机电源和编码器的电缆,连接变频主轴电机电源线,然后检查机床是否接地、机械部件是否可能出现干涉和碰撞、设备电源电压值波动是否在±10%之内,最后确认无误方可逐一支路上电。
图1为0IMATETD数控机床控制系统图解,数控系统控制译码运算和脉冲输出,I/O模块控制外部输入和输出信号通信,伺服驱动控制机床进给运动,变频器控制机床主运动[3]。
图1 0IMATETD数控机床控制系统图解初始化参数是为了恢复数控系统的出厂设置,正确的参数设置是保证数控机床正常运行的前提条件。
课程设计报告-滑动窗口协议仿真

滁州学院之阿布丰王创作课程设计陈说课程名称:计算机网络设计题目:滑动窗口协议仿真系别:计算机与信息工程学院专业:计算机科学与技术组别:第五组起止日期:2011年11月24日~2011年12月7日指导教师:赵国柱计算机与信息工程学院二○一一年制课程设计任务书一. 引言二. 基来源根基理2.1窗口机制2.2 1bit滑动窗口协议2.3 后退N协议2.4 选择重传协议2.5 流量控制三. 需求分析3.1 课程设计题目3.2 开发环境3.3运行环境3.4 课程设计任务及要求3.5 界面要求3.6 网络接口要求四. 详细设计4.1 结构体的界说4.2 发送方的主要函数4.3 接受方的主要函数五.源代码5.1 发送方的主要代码5.2 接收方的主要代码六. 调试与把持说明致谢[参考文献]课程设计的主要内容1.引言早期的网络通信中,通信双方不会考虑网络的拥挤情况直接发送数据.由于年夜家不知道网络拥塞状况,一起发送数据,招致中间结点阻塞失落包,谁也发不了数据.在数据传输过程中,我们总是希望数据传输的更快一些,但如果发送方把数据发送的过快,接收方就可能来不及接收,这就造成数据的丧失.因此就有了滑动窗口机制来解决这些问题.早期我们使用的是1bit滑动窗口协议,一次只发送一个帧,等收到ack确认才发下一个帧,这样对信道的利用率太低了.因此提出了一种采纳累积确认的连续ARQ协议,接收方不用对收到的帧逐个发送ack确认,而是收到几个帧后,对顺次达到的最后一个帧发送ack确认.同1bit滑动窗口协议相比,年夜年夜减少了ack数量,并消除延迟ack对传输效率的影响.可是,这会发生一个新的问题,如果发送方发送了5个帧,而中间的第3个帧丧失了.这时接收方只能对前2个帧发出确认.发送方无法知道后面三个帧的下落,只好把后面的3个帧再重传一次,这就是回退N协议.为了解决这个问题,又提出了选择重传协议.当接收方发现某帧犯错后,继续接受后面送来的正确的帧,只是不交付它们,寄存在自己的缓冲区中,而且要求发送方重传犯错的那一帧.一旦收到重传来的帧后,就可以将存于缓冲区中的其余帧一并按正确的顺序递交给主机.2.基来源根基理2.1 窗口机制滑动窗口协议的基来源根基理就是在任意时刻,发送方都维持了一个连续的允许发送的帧的序号,称为发送窗口;同时,接收方也维持了一个连续的允许接收的帧的序号,称为接收窗口.发送窗口和接收窗口的序号的上下界纷歧定要一样,甚至年夜小也可以分歧.分歧的滑动窗口协议窗口年夜小一般分歧.发送方窗口内的序号代表了那些已经被发送,可是还没有被确认的帧,或者是那些可以被发送的帧.接受方为其窗口内的每一个序号保管了一个缓冲区.与每个缓冲区相关联的还有一位,用来指明该缓冲区是满的还是空的.若从滑动窗口的观点来统一看待1比特滑动窗口、后退n及选择重传三种协议,它们的分歧仅在于各自窗口尺寸的年夜小分歧而已.1比特滑动窗口协议:发送窗口=1,接收窗口=1;后退N协议:发送窗口>1,接收窗口=1;选择重传协议:发送窗口>1,接收窗口>1.2.21bit滑动窗口协议当发送窗口和接收窗口的年夜小固定为1时,滑动窗口协议退化为停等协议(stop-and-wait).该协议规定发送方每发送一帧后就要停下来,等候接收方已正确接收简直认(acknowledgement)返回后才华继续发送下一帧.由于接收方需要判断接收到的帧是新发的帧还是重新发送的帧,因此发送方要为每一个帧加一个序号.由于停等协议规定只有一帧完全发送胜利后才华发送新的帧,因而只用一比特来编号就够了.其发送方和接收方运行的流程图如图所示.2.3 后退N协议由于停等协议要为每一个帧进行确认后才继续发送下一帧,年夜年夜降低了信道利用率,因此又提出了后退n协议.后退n协议中,发送方在发完一个数据帧后,不竭下来等候应答帧,而是连续发送若干个数据帧,即使在连续发送过程中收到了接收方发来的应答帧,也可以继续发送.且发送方在每发送完一个数据帧时都要设置超时按时器.只要在所设置的超时时间内仍收到确认帧,就要重发相应的数据帧.如:当发送方发送了N个帧后,若发现该N帧的前一个帧在计时器超时后仍未返回其确认信息,则该帧被判为犯错或丧失,此时发送方就不能不重新发送犯错帧及其后的N帧.从这里不难看出,后退n协议一方面因连续发送数据帧而提高了效率,但另一方面,在重传时又必需把原来已正确传送过的数据帧进行重传(仅因这些数据帧之前有一个数据帧出了错),这种做法又使传送效率降低.由此可见,若传输信道的传输质量很差因而误码率较年夜时,连续测协议纷歧定优于停止等候协议.此协议中的发送窗口的年夜小为k,接收窗口仍是1.2.4 选择重传协议在后退n协议中,接收方若发现毛病帧就不再接收后续的帧,即使是正确达到的帧,这显然是一种浪费.另一种效率更高的战略是当接收方发现某帧犯错后,其后继续送来的正确的帧虽然不能立即递交给接收方的高层,但接收方仍可收下来,寄存在一个缓冲区中,同时要求发送方重新传送犯错的那一帧.一旦收到重新传来的帧后,就可以原已存于缓冲区中的其余帧一并按正确的顺序递交高层.这种方法称为选择重发(SELECTICE REPEAT),其工作过程如图所示.显然,选择重发减少了浪费,但要求接收方有足够年夜的缓冲区空间.2.5 流量控制TCP的特点之一是提供体积可变的滑动窗口机制,支持端到真个流量控制.TCP的窗口以字节为单元进行调整,以适应接收方的处置能力.处置过程如下:(1)TCP连接阶段,双方协商窗口尺寸,同时接收方预留数据缓存区;(2)发送方根据协商的结果,发送符合窗口尺寸的数据字节流,并等候对方简直认;(3)发送方根据确认信息,改变窗口的尺寸,增加或者减少发送未获得确认的字节流中的字节数.调整过程包括:如果呈现发送拥塞,发送窗口缩小为原来的一半,同时将超时重传的时间间隔扩年夜一倍.(4)滑动窗口机制为端到端设备间的数据传输提供了可靠的流量控制机制.然而,它只能在源端设备和目的端设备起作用,当网络中间设备(例如路由器等)发生拥塞时,滑动窗口机制将不起作用.3.需求分析3.1 课程设计题目:滑动窗口协议仿真3.2开发环境:Visual C++ 6.03.3运行环境:Windows 把持系统3.4课程设计任务及要求:(1)法式依照滑动窗口协议实现端对真个数据传送.包括协议的各种战略,如包丧失、停等应答、超时等都应有所仿真实现.(2)显示数据传送过程中的各项具体数据.双方帧的个数变动,帧序号,发送和接受速度,暂停或重传提示等.3.5 界面要求:此次课程设计要求的所有功能应可视,我们组主要是用VC++编写的,运行在DOS环境下,观察发送方(sender)发送数据包到接收方(receive)时.界面应显示出双方帧个数的变动,帧序号,发送和接受速度,暂停或重传提示等,界面中必需静态显示数据帧的发送和接受情况,包括在相应的窗口详细显示相应的ACK和其他收发数据帧后发出的消息,以标明模拟协议的正确运作过程.在各种情况下,接受方和发送方窗口应实时显示帧的发送和接受情况,包括序号,时间戳,内容等.以及窗口的填充和清空情况.3.6 网络接口要求:两台机器或是一台机器中两个自力的线程模拟发送方与接受方,接收数据的端口初始应为监听状态.发送方向接受方发起连接,胜利后开始发送数据.4.概要设计4.1 结构体界说如下:typedef enum {data = 1,ack,nak,tout} frame_kind; //帧类型typedef struct frame_head{frame_kind kind; //帧类型unsigned int seq; //序列号unsigned int ack; //确认号unsigned char data[MAX_LENGTH]; //数据}Head;typedef struct frame{frame_head head; //帧头unsigned int size; //数据的年夜小} Frame;typedef struct framenode //队列节点类型{frame head_data;struct framenode *next;} Framenode;typedef struct{Framenode *front; //队头指针Framenode *rear; //队尾指针} LinkQueue;4.2发送方的主要函数实现:函数名:void InitLine(LinkQueue *q);功能:初始化队列.函数名:void GetFrameFromHost(LinkQueue *q);功能:从主机取数据帧,由于实验需要,假设主机有足够多的数据帧要发送.void DeLine(LinkQueue *q);功能:数据帧发送完毕(收到确认帧)后,删除发送的数据帧(队头).函数名:int QueueEmpty(LinkQueue *q);功能:判断队列是否为空.函数名:frame QueueFront(LinkQueue *q);功能:取队头,首帧是准备好待发送的帧.函数名:int QueueLen(LinkQueue *q);功能:计算队列长度.函数名:DWORD WINAPI ReceiveFun(LPVOID pArg);功能:发送线程调用的函数,pArg参数存接收帧指针.函数名:void main();功能:发送方主函数,首先和接收方(本机"127.0.0.1")建立socket连接并初始化发送队列.然后重复下面的步伐:(1)从主机取数据帧;(2)发送数据帧,含超时重发(接收方未收到或未收到接收方ack)和毛病重发(收到接收方nak);(3)设置超时计时器,这里是5秒;(4)等候确认,调用CreateThread()函数创立一个线程,超时则调用TerminateThread()函数结束线程并再次发送数据帧.收到数据帧则做后续处置;(5)收到否认帧nak则再次发送数据帧,收到确认帧ack则发送下一个数据帧;(6)如果发送的测试时间达到20秒,则提示是否继续测试,按‘q’或‘Q’退出测试.4.3接收方的主要函数实现:函数名:void InitLine(LinkQueue *q);功能:初始化队列.函数名:void GetFrameFromHost(LinkQueue *q);功能:准备好接收帧的缓冲池,首帧是待接收的帧,尾帧是已经接收的待提交主机的帧.由于实验需要,假设数据帧送往主机是足够快的.int DeLine(LinkQueue *q, frame *pf, unsigned int curw)功能:将帧数据保管供提交主机,curw是翻开的待接收数据的窗口.函数名:int QueueEmpty(LinkQueue *q);功能:判断队列是否为空.函数名:int QueueLen(LinkQueue *q);功能:计算队列长度.函数名:void main();功能:接收方主函数,首先和发送方建立socket连接并初始化初始化接收窗口.然后重复下面的步伐:(1)等候,接收数据帧;(2)校验数据帧,假定发生随机结果,20%的概率校验毛病或发送方发送数据帧超时;(3)校验毛病时,抛弃数据帧,并发送否认帧nak;(4)如果呈现接收超时(假定未收到发送方发送的数据帧),则不给发送发任何回应;(5)如果校验正确,首先判断是否是上一帧的重发.是上一帧的重发,则抛弃数据帧,并发送确认帧ack;是新的数据帧,则保管数据帧到以后接收窗口,并发送确认帧ack.(6)送数据帧至主机.5.源代码5.1 发送方的主要代码:{q->front = q->rear = NULL;}int QueueEmpty(LinkQueue *q){return q->front == NULL && q->rear == NULL; }frame QueueFront(LinkQueue *q){if (QueueEmpty(q)){printf("队列为空!\n");Sleep(SLEEPMS);exit(0);}return q->front->head_data;}{if (QueueEmpty(q)){return 0;}int num = 0;Framenode *p = q->front;while(p != NULL){num++;p = p->next;}return num;}void GetFrameFromHost(LinkQueue *q) {if(QueueLen(q) >= MAXPOOL)printf("data %d 已准备好\n", q->front->head_data.head.seq);return;}Framenode *p=(Framenode *)malloc(sizeof(Framenode));memset(p->head_data.head.data, 0, MAX_LENGTH);srand((unsigned)time(NULL));p->head_data.size = rand() % MAX_LENGTH; // 帧年夜小随机生成memset(p->head_data.head.data, '1', p->head_data.size);p->head_data.head.ack = -1;p->head_data.head.kind = data;p->head_data.head.seq = 0;p->next =NULL;if(QueueEmpty(q))q->front = q->rear=p; // 首帧是待发送的帧elsep->head_data.head.seq = (q->rear->head_data.head.seq + 1)%MAXPOOL;q->rear->next =p;q->rear =p;}printf("从主机获得:data %d,放入缓存\n", p->head_data.head.seq);GetFrameFromHost(q); // 由于实验需要,假设主机有足够多的数据帧要发送}void DeLine(LinkQueue *q){Framenode *p = NULL;if(QueueEmpty(q)){printf("队列为空!\n");}else{p = q->front;q->front = p->next;if (q->rear == p)q->rear = NULL;printf("发送data %d, %d 胜利!从缓存中删除\n", p->head_data.head.seq, p->head_data.size);free(p);p = NULL;}}void main(){printf("建立连接 ... \n");Begin:WORD wVersionRequested;WSADATA wsaData; //初始化socket库wVersionRequested=MAKEWORD(1,1); //两个byte型合并成一个WORD型int err=WSAStartup(wVersionRequested,&wsaData);if(err!=0){Sleep(SLEEPMS);return;}if ( LOBYTE( wsaData.wVersion ) != 1 || HIBYTE( wsaData.wVersion ) != 1 ){WSACleanup(); //中止Windows Sockets服务WSAStartup()成对使用Sleep(SLEEPMS);return;}socketClient = socket(AF_INET,SOCK_STREAM,0);//监听的套接字SOCKADDR_IN clientadd;clientadd.sin_addr.S_un.S_addr = inet_addr("127.0.0.1"); clientadd.sin_family = AF_INET;clientadd.sin_port = htons(7001);//设置连接真个IP、端口if(SOCKET_ERROR==connect(socketClient,(SOCKADDR*)&clientadd,sizeof( SOCKADDR)) ) //连接{WSACleanup();Sleep(SLEEPMS);goto Begin;}char getData[RECEIVE_MAX_LENGTH];memset(getData, 0, RECEIVE_MAX_LENGTH); //清零if(recv(socketClient,getData,RECEIVE_MAX_LENGTH,0) == SOCKET_ERROR) //接受{printf("接受连接提示信息犯错!\n");}else{printf("%s\n",getData);}char sendData[SEND_MAX_LENGTH];memset(sendData, 0, SEND_MAX_LENGTH);strcpy(sendData, "你好接收方,我是发送方!");if( SOCKET_ERROR == send(socketClient,sendData,strlen(sendData)+1,0) ) //发送{printf("发送连接提示信息犯错!\n");WSACleanup();closesocket(socketClient);Sleep(SLEEPMS);return;}printf("按任意键继续!\n");while (!kbhit()) {}; //等候开始Sleep(SLEEPMS);printf("1bit滑动窗口协议:发送方,发送窗口=1\n");LinkQueue QueueQ;InitLine(&QueueQ);frame packetsend; //dataframe packetreceive; // ack,nakunsigned long tick = GetTickCount();int ret = 0;HANDLE hThread;while(1){GetFrameFromHost(&QueueQ); //从主机取数据帧memset(&packetsend, 0, sizeof(packetsend));Sleep(SLEEPMS);printf("\n");packetsend = QueueFront(&QueueQ); //取数据帧ret = send(socketClient, (char *)&packetsend, sizeof(packetsend), 0);//发送dataif(ret == SOCKET_ERROR){printf("发送数据犯错!\n");continue;}printf("发送数据帧:data %d, %d\n", packetsend.head.seq, packetsend.size);const unsigned long timeOut = 5 * 1000; //设置超时计时器 5秒超时memset(&packetreceive, 0, sizeof(packetreceive));Sleep(SLEEPMS);printf("\n");InitializeCriticalSection(&gCS); // 初始化临界区hThread=CreateThread(NULL, 0, ReceiveFun, (LPVOID)&packetreceive, 0, NULL);int r = WaitForMultipleObjects(1, &hThread, TRUE, timeOut);DeleteCriticalSection(&gCS); //与InitializeCriticalSection(&gCS);成对使用if(ret == SOCKET_ERROR || ret == SOCKET_DISCONN){printf("接受犯错!Press any key to continue\n");while (!kbhit()) {};continue;}if(r == WSA_WAIT_TIMEOUT) //判断超时{TerminateThread(hThread, 0); //终止线程printf("超时重传:data %d, %d\n", packetsend.head.seq,packetsend.size);}else if(packetsend.head.seq == packetreceive.head.ack){srand((unsigned)time(NULL));switch(rand() % 5) //假定发生随机结果,20%的概率超时{case 0:printf("接收方发送回复超时(ack丧失模拟):%d\n", packetsend.head.seq);printf("超时重传:data %d, %d\n", packetsend.head.seq,packetsend.size);break;default:if(packetreceive.head.kind == ack){printf("接受ack帧:ack %d\n", packetreceive.head.ack);DeLine(&QueueQ);}else if(packetreceive.head.kind == nak){printf("接受nak帧:nak %d\n", packetsend.head.seq);}break;}}else printf("帧序号犯错:%d\n", packetreceive.head.ack);if(GetTickCount() - tick > 20 * TIMEOUT) //设置时间20秒{printf("继续时间20s. 按q退出,其他键继续\n");int kbc = getch();if(kbc == 'q' || kbc == 'Q')break;}}printf("按任意键退出!\n");while (!kbhit()) {};Sleep(SLEEPMS);printf("谢谢使用!\n");WSACleanup();closesocket(socketClient);Sleep(SLEEPMS);}DWORD WINAPI ReceiveFun(LPVOID pArg){EnterCriticalSection(&gCS);//进入critical sectionframe *packetreceive = (frame *)pArg;ret = recv(socketClient, (char *)packetreceive, sizeof(*packetreceive), 0);LeaveCriticalSection(&gCS); //线程用毕,离开critical sectionreturn ret;}5.2 接收方的主要代码:{q->front = q->rear = NULL;}int QueueEmpty(LinkQueue *q){return q->front == NULL && q->rear == NULL; }frame QueueFront(LinkQueue *q){if (QueueEmpty(q)){printf("队列为空!\n");Sleep(SLEEPMS);exit(0);}return q->front->head_data;}{if (QueueEmpty(q)){return 0;}int num = 0;Framenode *p = q->front;while(p != NULL){num++;p = p->next;}return num;}int GetFrameFromHost(LinkQueue *q) {if(QueueLen(q) >= MAXPOOL){printf("准备接受:data %d \n", q->front->head_data.head.seq);return q->front->head_data.head.seq;}Framenode *p=(Framenode *)malloc(sizeof(Framenode));memset(p->head_data.head.data, 0, MAX_LENGTH);p->head_data.head.ack = -1;p->head_data.head.kind = ack;p->head_data.head.seq = 0;p->next =NULL;if(QueueEmpty(q))q->front = q->rear=p;else{p->head_data.head.seq = (q->rear->head_data.head.seq + 1)%MAXPOOL;q->rear->next =p;q->rear = p;}return GetFrameFromHost(q);}int DeLine(LinkQueue *q, frame *pf, unsigned int curw) //假设数据帧送往主机是足够快的{Framenode *p = NULL;if(curw == q->front->head_data.head.seq)p = q->front;elsep = q->rear;if(p->head_data.head.ack != -1) //假定命据已经提交主机{printf("向主机交付data %d, %d 胜利!\n", p->head_data.head.ack, p->head_data.size);}memset(p->head_data.head.data, 0, MAX_LENGTH);memcpy(p->head_data.head.data, pf->head.data, pf->size);p->head_data.size = pf->size;p->head_data.head.ack = pf->head.seq; //保管发送帧序号return p->head_data.head.seq;}frame QueueAnswer(LinkQueue *q, unsigned int curw){if(curw == q->front->head_data.head.seq){return q->front->head_data;}else{return q->rear->head_data;}}void main(){Begin:WORD wVersionRequested;WSADATA wsaData; //初始化socket库wVersionRequested = MAKEWORD( 1, 1 ); //两个byte型合并成一个WORD型int err = WSAStartup(wVersionRequested, &wsaData );//使用sockets之前要调用一次if ( err != 0 ){Sleep(SLEEPMS);return;}if ( LOBYTE( wsaData.wVersion ) != 1 || HIBYTE( wsaData.wVersion ) != 1 ){WSACleanup();//中止Windows Sockets服务 WSAStartup()成对使用Sleep(SLEEPMS);return;}SOCKET socksrv = socket(AF_INET,SOCK_STREAM,0);//监听的套接字SOCKADDR_IN socketadd;socketadd.sin_addr.S_un.S_addr = htonl(INADDR_ANY); //监听连接socketadd.sin_family = AF_INET;socketadd.sin_port = htons(7001); //设置端口if( SOCKET_ERROR == bind(socksrv,(SOCKADDR*)&socketadd,sizeof(SOCKADDR)) ){printf("绑定犯错!\n");WSACleanup();Sleep(SLEEPMS);return;}if( SOCKET_ERROR == listen(socksrv,5) ){printf("监听犯错!");WSACleanup();Sleep(SLEEPMS);return;}SOCKADDR_IN sockclient;int len = sizeof(SOCKADDR);SOCKET sockconn = accept(socksrv,(SOCKADDR*)&sockclient,&len);//建立连接的套节字if(INVALID_SOCKET == sockconn ){printf("建立连接犯错!\n");WSACleanup( );Sleep(SLEEPMS);return;}char sendData[SEND_MAX_LENGTH];memset(sendData, 0, SEND_MAX_LENGTH);sprintf(sendData,"%s","你好发送方,我是接受方!");if( SOCKET_ERROR == send(sockconn,sendData,strlen(sendData)+1,0) ){printf("发送连接提示信息犯错!\n");WSACleanup( );closesocket(sockconn);Sleep(SLEEPMS);return;}char getData[RECEIVE_MAX_LENGTH];memset(getData, 0, RECEIVE_MAX_LENGTH);recv(sockconn,getData,RECEIVE_MAX_LENGTH,0);printf("%s\n",getData);printf("1bit滑动窗口协议:接收方,接收窗口=1\n");LinkQueue QueueQ;InitLine(&QueueQ);frame packetreceive; //dataframe packetsend; // ack,nakint curw = GetFrameFromHost(&QueueQ);//初始化接收窗口int ret = 0;while(1){memset(&packetreceive, 0, sizeof(packetreceive));Sleep(SLEEPMS);printf("\n");ret = recv(sockconn,(char *)&packetreceive, sizeof(packetreceive), 0);if(ret == SOCKET_ERROR || ret == SOCKET_DISCONN){if(ret == SOCKET_ERROR){printf("连接犯错!自动连接!\n");continue;}else{printf("连接已断开,按q退出,其他键等候新的连接\n");int kbc = getch();if(kbc == 'q' || kbc == 'Q')break;else{WSACleanup();closesocket(sockconn);Sleep(SLEEPMS);goto Begin;}}}srand((unsigned)time(NULL));switch(rand() % 5) //假定发生随机结果,20%的概率校验毛病或接收发送方超时{case 0:printf("接受数据帧:data %d, %d,校验毛病,抛弃(数据帧犯错模拟)\n", packetreceive.head.seq, packetreceive.size);memset(&packetsend, 0, sizeof(packetsend));memcpy(&packetsend, &packetreceive, sizeof(packetreceive));packetsend.head.ack = packetreceive.head.seq;packetsend.head.seq = curw;packetsend.head.kind = nak;printf("发送否认帧:nak %d\n", packetreceive.head.seq);break;case 1:packetsend.head.kind = tout;printf("发送方发送数据超时(数据帧丧失模拟):%d\n", packetreceive.head.seq);break;default:printf("接受数据帧:data %d, %d,校验正确\n", packetreceive.head.seq, packetreceive.size);if(packetreceive.head.seq == (QueueAnswer(&QueueQ, curw)).head.ack){printf("上一帧的重发,抛弃,直接发送确认帧:ack %d\n", packetreceive.head.seq);}else{printf("新的数据帧:data %d, %d,放入缓存\n", packetreceive.head.seq, packetreceive.size);curw = DeLine(&QueueQ, &packetreceive, curw); //将新帧保管待送往主机memset(&packetsend, 0, sizeof(packetsend));packetsend = QueueAnswer(&QueueQ, curw); //待发送简直认帧printf("发送确认帧:ack %d\n", packetreceive.head.seq);}packetsend.head.kind = ack;break;}if(packetsend.head.kind == tout) continue; //发送方使用多线程判断超时ret = send(sockconn, (char *)&packetsend, sizeof(packetsend), 0);if(ret == SOCKET_ERROR){printf("发送ack或nak犯错!自动连接!\n");continue;}}printf("按任意键退出!\n");while (!kbhit()) {};Sleep(SLEEPMS);cprintf("谢谢使用!\n");WSACleanup();closesocket(sockconn);Sleep(SLEEPMS);}6.调试与把持说明用户翻开接收方法式时会自动等候发送方,翻开发送方法式时会自动检验考试连接接收方法式.当发送方法式和接收方法式都翻开时,发送法式将连接接收方法式,连接胜利时会有提示信息.在发送方按任意键开始模拟,发送与接受是自动进行,呈现各种情况(帧丧失、帧犯错、ack丧失等)的概率都是20%,法式执行20秒后会提示是否继续执行.如图:1,2是正常情况:发送方发送数据帧->接受方收到数据帧,经检验该数据帧正确,发送确认帧->发送方收到确认帧,删除已收到确认的数据帧.3,4是数据帧丧失:发送方发送数据帧->接受方未收到数据帧,没有任何举措->发送方超时重传该数据帧.5,6是数据帧犯错:发送方发送数据帧->接收方收到数据帧,经检验该数据帧犯错,发送否认帧->接受方收到否认帧,重传该数据帧.7,8是ack丧失:发送方发送数据帧->接受方收到数据帧,经检验该数据帧正确,发送确认帧->发送方未收到确认帧,超时重传该数据帧.7.致谢在设计研究和设计陈说撰写过程中,感谢我的同学和老师给与的关心和帮手,从中我学会了很多,不单是专业课程的知识,还有一些编写一个vc++模拟小系统的必备的能力,谢谢你们.8.参考文献[1] Andrew S. Tandenbaum. Computer Networks(3rdEDITION)[M] . Prentice Hall ,1996.[2] 胡晓峰,等编. 计算机网络原理[M] . 长沙. 国防科技年夜学出书社. 1997.[3] 《计算机网络》(第5版)——电子工业出书社谢希仁编著[4] 陈洛资,等. 计算机网络软件设计、开发与编程[M] .北京:科学出书社. 1994.[5] 高传善,等. 计算机网络教程[m] . 上海:复旦年夜学出书社. 1996.9.附录。
滑键联接-雅安职业技术学院
2 螺杆和螺母的材料
螺杆和螺母的材料除要求有足够的强度外,还要求有较好 的耐磨性、减摩性和良好的工艺性。
2.1 滚动螺旋简介 8.4.3
• 观察下图,说明滚动螺旋的特点。
滚动螺旋
1—托杯;2—手柄; 3—螺线;4—紧定 螺钉; 5—螺杆;6—底座; 7—螺栓;8—挡圈
螺旋起重器
滚动螺旋
8.5 小结
F π 2 d0 4
1.3Fa e ≤ [ ] 2 d1 / 4
F P ≤ P d 0 Lmin
≤
受拉螺栓的强度计算主要是确定或验算螺纹危险剖面 的尺寸,以保证螺栓杆不破环(即不失效)。至于螺栓 的其他部分(如螺纹牙、螺栓头等)以及螺母、垫圈的 结构尺寸,是根据等强度条件以及适用经验来设计的。 等强度的含义:在一个螺栓连接中,如果具有螺纹的 螺杆处不被破坏,那其他部分也不会破坏。所以,螺杆 以外的部分一般无需进行强度计算,可根据螺栓的公称 直径从有关标准查取。
F Fa tan
矩形螺纹受力分析
3
非矩形螺纹的受力分析
• 如图分析:非矩形螺纹的摩擦阻力可写为
Fa f a f Fa f F cos cos
• 其中f’为当量摩擦系数:
f f tan cos
4
螺纹的自锁
• 螺纹联接被拧紧后,如不加反向外力矩,不论轴向力多
普通平键的主要结构形式
(2)导向平键联结 导向平键联接的特点如下: 导向平键是一种较长的平键, 用螺钉将其固定在轴的键槽中。 导向平键除实现周向固定外, 由于轮毂与轴之间均为间隙配 合,允许零件沿键槽作轴向移 动,构成动联接。 为装拆方便,在键的中部设 有起键螺孔。
(3)滑键联接 滑键联接的特点如下。 因为滑移距离较大时,用过 长的平键制造困难,所以当轴
第六章-键和花键连接解析ppt课件

平键的加工
平键的装配
2)薄型平键——键高约为普通平键的60%~70%:圆 头、方头、单圆头 (用于薄臂结构、 空心轴等径向尺寸受限制的联接)
3)导向平键与滑键——用于动联接,即轴与轮毂之 间有相对轴向移动的联接
导向键——键不动,轮毂轴向移动
滑键——键随轮毂移动
特点:装拆方便,对零件对中性无影响,容易制造,作 用可靠,多用于高精度联接。但只能周向固定,不 能承受轴向力
的联接,应用较少
二、花键联接的设计计算
设计:选花键类型→
按轴径定花键尺寸→ 验算联接强度
齿数多 对轴强度削弱小 适用于轻载或薄壁零件
失效形式: ①键齿的压溃(静联接) ②磨损(动联接) ③齿根剪断
设:工作载荷沿键的工作长度l均匀 分布。且各齿面上压力的合力N 作用在平均直径dm处,如图
静连接:
挤压强度条件:
圆柱销靠过盈配合 固定在销孔中,经多次装 拆会降低定位精度和可靠性。
圆锥销具有1:50 的锥度,安装方便,定 位精度高。
开尾圆锥销在联接时 的防松效果好,适用于有冲 击、振动的场合的联接。
端部带螺纹的 圆锥销可用于盲孔或 拆卸困难的场合;
销轴用于两零件的 铰接处,构成铰链联接。
销轴通常用于开口销锁定, 工作可靠,装拆方便。 槽销上有辗压或模锻出的三条纵向沟槽, 将槽销打入销孔后,由于材料的弹性使销挤压在 销孔中,不易松脱,因而能承受振动和变载荷。
1、平键联接的强度校核
a) 挤压强度条件为: 允许传递的扭矩:
T——扭矩(N∙mm ) k——工作高度 k=h/2 d— — 轴 径 ( mm) l——工作长度 A型键: l=L-b B型键: l=L C型键: l=L-b/2 L—— 公称长度
键花键联接和销联接课件.ppt
定位销 按用途分 联接销
安全销
潘存云教授研制
类
型
按形状分
安全销:作为安全装置中的过载剪 切元件。安全销在过载时被剪断, 因此,销的直径应按剪切条件确定。 为了确保安全销被剪断而不提前发 生挤压破坏,通常可在安全销上加 一个销套。
工作面
潘存云教授研制 新疆大学专用
潘存云教授研制
键花键联接和销联接课件
潘存云教授研制 作者: 潘存云教授
3. 楔键联接和切向键联接 结构特点:键的上表面有1:100的斜度,
轮毂槽的底面也有1:100的斜度。 缺点:定心精度不高。
应用:只能应用于定心精度不高,载荷 平稳和低速的联接。
安装时用 力打入
许用值 轮毂材料
载荷性质 静载荷 轻微冲击 冲 击
[σp ]
钢 铸铁
[p ]
钢
125~150 70~80
50
100~120 50~60 40
60~90 30~45
30
2)半圆键联接强度计算
用于静联接,失效形式为表面压溃
l l近似为公称长度 k
σp =
新疆大学专用
2T kl d
≤[σp键]花键联M接P和a销联接课件
平键 平头(B型) 用盘铣刀加工,轴的应力集中小。
结构 单圆头(C型) 用于轴端
盘铣刀
A型
B型
C型
潘存云教授研制
普通平键应用最广。
薄型平键的高度为普通平键的60~70%,也分圆头、平
头、单圆头三种。传递扭矩能力低,常用于薄壁结构、
空心轴等径向尺寸受限键花制键联的接和场销联合接课。件
新疆大学专用
作者: 潘存云教授
§6-2 花键联接
一、花键联接的类型、特点和应用
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
arctan f
角仅与摩擦系数f有关,故称为摩擦角
认识螺纹摩擦角
2
矩形螺纹受力分析
(1)当滑块沿斜面等速上升时,由力的平衡条件可知,FR、
F和Fa三力组成力多边形
F Fa tan
(2)当滑块沿斜面等速下滑时,轴向载荷Fa变为驱动力,而 F变为维持滑块等速运动所需的平衡力,由力多边形可得
8.2 销联接
认识销联接(视频)
8.2.1 销联接的种类和用途
(1)定位销:主要用于零件间位置定位,常用作组 合加工和装配时的主要辅助零件。 (2) 联接销:主要用于零件间的联接或锁定,可传 递不大的载荷。 (3)安全销:主要用于安全保护装置中的过载剪断 元件。
8.2.2 销联接应用
销是标准件,通常用于零件间的连接或定位。常用 的销有圆柱销、圆锥销和开口销。开口销用在带孔螺 栓和带槽螺母上,将其插入槽形螺母的槽口和带孔螺 栓的孔,并将销的尾部叉开,以防止螺栓松脱。
8.1 键联接
键是一种标准件,主要用于轴与轴上零件(如齿轮、带轮)的 周向固定并传递转矩,其中有些还可以实现轴上零件的轴向固 定或轴向滑动 。
认识键联接(视频)
8.1.1 平键联接
• 普通平键用于静联接,即轴与轮毂之间无轴向相对移动。 • 根据键的端部形状不同,平键分为A、B、C3种类型。
(1)普通平键的结构形式
• 根据上述键的连接性质,键连接可分为松键连接和紧键连接。 • 松键连接有平键、半圆键和花键连接,其以键的两个侧面为 工作面,键与键槽的侧面需要紧密配合,键的顶面与轴上键 连接零件间留有一定的间隙。松键连接时轴与轴上零件的对 中性好,尤其在高速精密传动中应用较多。松键连接不能承 受轴向力,轴上零件需要轴向固定时,应采用其他固定方法。 • 紧键连接有楔键和切向键两种类型。
8.3 螺纹联接
认识螺纹联接(视频)
8.3.1 螺纹的形成原理和种类
• 各种螺纹都是根据螺旋线原理加工而成,螺纹加工大部分采 用机械化批量生产。 • 对于小批量、单件产品,外螺纹可采用车床加工,内螺纹可 以在车床上加工,也可以先在工件上钻孔,再用丝锥攻制而 成。
常用螺纹连接零件
1 螺纹的形成
如图所示: (1)将底边AB长为πd的直角三 角形ABC绕在直径为d的圆柱体 上,则三角形的斜边AC在圆柱 体上便形成一条螺旋线,底边 AB与斜边AC的夹角为螺旋线 的升角。 (2)当取三角形、矩形或锯齿 形等平面图形,使其保持与圆 柱体轴线共面状态,并沿螺旋 线运动时,则该平面图形的轮廓 线在空间的轨迹便形成螺纹。
观察下图的花键,说明花键的特点?
认识花键联接(视频)
• 由于其工作面为均布多齿的齿侧面,故承载能力高。 • 轴上零件和轴的对中性好,导向性好,键槽浅,齿根应力集 中小,对轴和轮毂的强度影响小。 • 加工时需要专用的设备、量刀和刃具,制造成本高。 • 适用于载荷较大、定心要求较高的静连接和动连接,在汽车、 拖拉机、机床制造和农业机械中有较广泛的应用。
上零件滑移距离较大时,宜采
用滑键。 滑键固定在轮毂上,轮毂带 动滑键在轴槽中作轴向移动, 因而需要在轴上加工长的键槽。
8.1.2 半圆键连接
观察下图的半圆键,说明半圆键的特点?
8.1.3 楔键连接
观察下图的楔键,说明楔键的特点?
8.1.4 切向键连接
观察下图的切向键,说明切向键的特点?
8.1.5 花键连接
大,螺母也不会自动松开,则称螺纹具有自锁性能。
≤ • 螺纹的自锁条件:
• 即螺纹升角小于当量摩擦角 • 为了防止螺母在轴向力作用下自动松开,用于连接的紧 固螺纹必须满足自锁条件。
螺纹自锁的形成原因
5
螺旋副的效率
螺旋副的效率是有效功与输入功之比。若按螺旋转动 一圈计算,输人功为2T,此时升举滑块(重物)所作 的有效功为Fa· S,故螺旋副的效率为 :
2 螺纹的形式
(1)外螺纹和内螺纹 (2)圆柱螺纹和圆锥螺纹 (3)螺纹的牙型
3 螺纹的旋向
• 观察下图,认识螺纹的旋向有什么不同,想一想怎样判断两 个螺纹的旋向 ?
螺纹的牙型
4
单线螺纹和多线螺纹
• 观察下图,认识认识单线螺纹和多线螺纹。
8.3.2 螺纹副的受力分析、效率和自锁
1.摩擦角
如图所示: (1)滑块所受的力:垂直载荷Q、平面对滑块的法向约束力N、 使滑块水平移动的作用力F、摩擦力 Ff Nf (2) tan F / N f N / N f
F Fa tan
矩形螺纹受力分析
3
非矩形螺纹的受力分析
• 如图分析:非矩形螺纹的摩擦阻力可写为
Fa f a f Fa f F cos cos
• 其中f’为当量摩擦系数:
f f tan cos
4
螺纹的自锁
• 螺纹联接被拧紧后,如不加反向外力矩,不论轴向力多
机械设计基础
主讲人:任仕伟
雅安职业技术学院机电与信息工程系
第 8 章 机械联接及螺旋传动
本章学习要求
了解键与销联接的特点及应用。 了解螺纹联接的种类及应用。 掌握螺纹联接的预紧和防松。 掌握螺纹联接的强度计算。 了解螺旋传动的类型。
本章大纲
• 8.1 键联接 • 8.2 销联接 • 8.3 螺纹联接 • 8.4 螺旋传动
tan tan( )
arctan f
由上式可知,当量摩擦角一定时,效率只是螺纹升 角的函数。
8.3.3 标准螺纹联接的种类和用途
1 种类和用途
螺纹的种类和用途
2
标准螺纹紧固件
• 螺纹紧固件的品种很多,大都已标准化,其规格、型号均已 系列化 。 (1)螺栓 (2)双头螺柱 (3)螺钉、紧定螺钉 (4)螺母 (5)垫圈
普通平键的主要结构形式
பைடு நூலகம்
(2)导向平键联结 导向平键联接的特点如下: 导向平键是一种较长的平键, 用螺钉将其固定在轴的键槽中。 导向平键除实现周向固定外, 由于轮毂与轴之间均为间隙配 合,允许零件沿键槽作轴向移 动,构成动联接。 为装拆方便,在键的中部设 有起键螺孔。
(3)滑键联接 滑键联接的特点如下。 因为滑移距离较大时,用过 长的平键制造困难,所以当轴