电子凸轮基本知识
电子凸轮讲义

电子凸轮讲义一:机械凸轮二:电子凸轮电子凸轮(Electronic CAM),是模拟机械凸轮的一种智能控制器。
它通过编码器将位置信息反馈给CPU,CPU进行运算处理,并在指定位置将进行输出。
电子凸轮主要有两种形式,一种是轨迹—轨迹式凸轮(path--path),它是在凸轮程序中为每一个凸轮设置一个轨迹起点和轨迹终点,当实际位置(角度或者位移)到达轨迹起点时凸轮被置位;而当实际位置到达轨迹终点时凸轮被复位。
对于此类凸轮,可得到两轴之间的非线性电子同步比,从轴位置可与使用凸轮轮廓的主轴同步。
另一种是轨迹—时间式凸轮(path--time),它是在凸轮程序中为每个凸轮位置设置一个轨迹的起点和持续时间,当实际位置到达轨迹起点时凸轮被置位,然后经过预设的持续时间之后凸轮被复位。
对于此类凸轮,可得到不同于梯形或者S形的运动轮廓。
下面主要介绍的是第一种凸轮。
如下图(a)所示,在凸轮的凸起部分安装一个行程开关X1,在凸轮顺时针匀速旋转时,X1的常开触点就会形成如图(b)所示的输出开关动作时序。
把使X1开始动作的点(图中a点)称为上升点,它对应于输出脉冲的上升沿,把对应于使X1复位的点(图中b点)称为下降点,它对应于输出脉冲的下降沿。
凸轮旋转一周,其输出的脉冲宽度和凸轮的凸起部分对应的角度有关,而输出脉冲的位置与其上升点的位置相关。
注意:在凸轮上可以有一个凸面,也可以有多个凸面,多个凸面就会在不同的时间段形成多个脉冲时序的输出。
电子凸轮的输出是以DOG为单位进行设置。
一个DOG分为DOG WIDTH和DOG INTERVAL两部分,DOGWIDTH相当于机械凸轮中开关被压下并保持的时间或角度范围,需设置一个起始角度(Start position)ON(比如0°)和一个终止角度(End position)OFF(比如30°)。
相应的DOG INTERVAL就是相当于开关松开的角度范围。
对于一个凸轮来讲,可以有多个DOG,通常只需设置DOG WIDTH,而DOG Interval就是在两个DOG WIDTH中间的角度范围,不再需另外设置。
电子凸轮参数说明
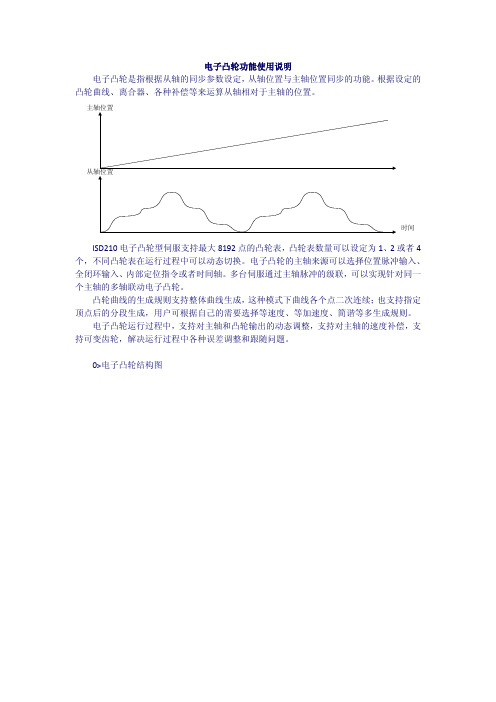
电子凸轮功能使用说明电子凸轮是指根据从轴的同步参数设定,从轴位置与主轴位置同步的功能。
根据设定的凸轮曲线、离合器、各种补偿等来运算从轴相对于主轴的位置。
时间ISD210电子凸轮型伺服支持最大8192点的凸轮表,凸轮表数量可以设定为1、2或者4个,不同凸轮表在运行过程中可以动态切换。
电子凸轮的主轴来源可以选择位置脉冲输入、全闭环输入、内部定位指令或者时间轴。
多台伺服通过主轴脉冲的级联,可以实现针对同一个主轴的多轴联动电子凸轮。
凸轮曲线的生成规则支持整体曲线生成,这种模式下曲线各个点二次连续;也支持指定顶点后的分段生成,用户可根据自己的需要选择等速度、等加速度、简谐等多生成规则。
电子凸轮运行过程中,支持对主轴和凸轮输出的动态调整,支持对主轴的速度补偿,支持可变齿轮,解决运行过程中各种误差调整和跟随问题。
0>电子凸轮结构图1>全局开关Pn[837] 电子凸轮开关电子凸轮开关Pn[837]电子凸轮使能开关0‐不使能1‐使能只有凸轮开关使能时,才能使用电子凸轮的各项功能。
凸轮开关关闭时,当前主轴位置、当前凸轮相位将被复位。
2>主轴Pn[838] 主轴来源选择Pn[839] 时间轴周期脉冲量Pn[840]、Pn[841] 当前主轴位置主轴来源选择Pn[838]选择电子凸轮的主轴0‐位置指令脉冲,可以来自低速脉冲口,也可以来自高速脉冲口,由参数Pn[407]‐Pn[416]配置1‐全闭环口脉冲,可以来自CN6上的全闭环脉冲,RS422电平标准,AB相2‐定位指令,可以来自PLC内部定位指令,主轴来源选择定位指令时,电子凸轮的输出位置调整功能无效3‐时间轴 ,可以来自时间轴,参考Pn[839]时间轴周期脉冲量Pn[839]主轴来源选择时间轴时,设定每0.5mS主轴的位置增量‐32768~32767当前主轴位置Pn[840]、Pn[841]反映凸轮使能后主轴的位置,‐2147483648~2147483647,超出范围后循环。
电子凸轮说明书

兴世机械电子凸轮简要说明一.安全和注意1.注意事项本电子凸轮并不是完全的绝对值编码器,它在第一转(没有找到原点时)不会输出信号.2.安全操作请在完全了解明白该手册后,再安装和操作本电子凸轮.二.安装1.控制器安装直接嵌入面板安装,用配带的金属扣固定.2.编码器安装编码器用配套的联轴器安装,请保证编码器轴和设备驱动轴的同心度.三.接线1.接线端子位置:2.电源24V:24V供电电源.0V:电源公共端.3.编码器接线BLK: Black 黑色线RED:Red 红色线WHI: White 白色线A相脉冲+GRY:Grey 灰色线A相脉冲-BLU: Blue 蓝色线B相脉冲+BRN: Brown 棕色线B相脉冲-YLW: Yellow 黄色线Z相脉冲+GRN: Green 绿色线Z相脉冲-其它端子不用接线.如果需要更换电子凸轮旋转方向,请交换WHI和GRY(白色线和灰色线).4.输出信号接线COM:输出信号的公共点,每8个通道共用一个.并且每8个通道内部共用一个保险.0-31: 输出通道.NPN集电极开路输出,最高电压300V/最大电流150mA/最大功率100mW.5.控制信号接线24V:控制信号输入电源.ST:启动,当信号为ON时,控制使能输出,并可以设定参数.B0- B2:程序组选择信号.可以选择0-7程序组,如下表: 端子接0V时激活(ON),悬空不接或接24V无效(--).B0 B1 B2 NO.-- -- -- 0ON -- -- 1-- ON -- 2ON ON -- 3-- -- ON 4ON -- ON 5-- ON ON 6ON ON ON 7程序组信号在ST信号跳变沿读取.四.控制1.启动ST:启动信号,引脚为0V时激活.激活后读取程序组并使能凸轮输出.2.程序组切换先设定好B0-B2的程序组选择信号,再激活ST信号.五.触控面板:进入进角补偿的菜单。
:将变更的参数生效,并保存。
设定参数项改变,在程序时切换至ON/OFF,在进角补偿切换速度/ON的角度/OFF 的角度。
NJ电子凸轮培训资料

NJ电子凸轮培训资料欧姆龙自动化(中国)有限公司FAE中心2015年7月目录一、凸轮概述 (2)1、机械凸轮组成结构 (2)2、机械凸轮的实现 (2)3、电子凸轮的实现 (6)二、NJ的凸轮指令和凸轮表 (8)1、NJ的凸轮指令 (8)2、其它凸轮相关指令 (18)3、NJ的凸轮表的设定 (21)三、凸轮计算应用实现 (24)1、包封机变袋长凸轮计算实现 (24)2、枕包机变袋长凸轮计算实现 (26)①设备要求 (26)②解决方法 (28)③设置及程序 (33)3、枕包机变袋长凸轮三次方优化实现 (33)①飞剪功能实现 (33)②凸轮曲线的三次方优化 (35)③调试经验 (37)4、色标补偿计算实现 (37)①产生偏差的原因 (37)②如何实现“纠偏”程序 (38)凸轮概述1、机械凸轮组成结构机械凸轮机构一般是由凸轮、从动件和机架三个构件组成的高副机构。
凸轮通常作连续等速转动,从动件根据使用要求设计使它获得一定规律的运动。
凸轮机构能实现复杂的运动要求,广泛用于各种自动化和半自动化机械装置中。
固定机架从动件凸轮凸轮结构示意图2、机械凸轮的实现机械凸轮是一个具有曲线轮廓或凹槽的构件。
一般可分为三类:盘形凸轮:凸轮为绕固定轴线转动且有变化直径的盘形构件;如下图这是凸轮的基本形式,凸轮绕固定轴旋转时,推杆(从动件)的位移规律是一定的。
移动凸轮:凸轮相对机架作直线移动;如下图从动件一般做成杆状,接触凸轮的部分装有滚轮,在凸轮上做纯滚动,从而带动从动杆移动。
它可视为盘型凸轮的演化形式。
圆柱凸轮:凸轮是圆柱体,可以看成是将移动凸轮卷成一圆柱体。
凸轮是圆柱体,可以看成是将移动凸轮卷成一个圆柱体。
圆柱凸轮不再做往复直线移动,而是做旋转移动。
前两种都可以看成平面运动形式,而圆柱凸轮则是一种空间运动形式。
机械凸轮从动件(推杆)一般具有3种不同形状。
尖顶从动件构造简单,尖顶能与任意复杂凸轮轮廓保持接触,但易于磨损,所以只适用于作用力不大和速度不高的场合。
电子凸轮培训
StopCycleMode = 2: Same as mode 1 but use the invert couple cu
rve
for uncouple phase
StopCycleMode = 3: Interrupt controlled uncoupling. After rece
ive
DI03 Interrupt and slave has moved the
Z2: Curv e operation main curv e with repeated cy cle 23
IPOS-Program || Uncoupling control
Uncouple control (Mode2)
CamState 4: Uncoupling 起动曲线的镜像
state
if ( (Uncouple curv e passed) && (StopCy cleModeControll.1==1))
❖ 终止StopCycle过程后,将H403(StopCycleReload)的值重
H404H=4H040(4-S1topCycHl4e0C4o=u0nter)计H4数03器中;H404
Reload
Counter
电子凸轮
StopCycle模式1
23
位置控制 速度控制
电子凸轮
StopCycle模式
电子凸轮
StartupCycle模式
➢ 变量H410----H416定义StartupCycle过程;
➢ 手动方式、事件方式、中断方式可以触发StartupCycle过程; ➢ StartupCycle模式由H410( StartupCycleMode)定义; ➢ StartupCycle包括256点曲线,仅仅运行一次。
电子凸轮控制器的原理及应用
电子凸轮控制器的原理及应用
电子凸轮控制器是一种通过电子芯片控制凸轮轴运动的装置。
其原理是利用电子控制器控制凸轮轴不同位置的电磁阀,从而实现发动机进、排气门的开闭时机和时长的精确控制。
电子凸轮控制器的应用主要集中在发动机的可变气门正时系统上。
传统的气门正时系统中,凸轮轴的运动由机械装置控制,无法灵活地调整气门开闭的时机和时长。
而电子凸轮控制器则通过调节电磁阀的开关时机和时长,可以实现对气门的精确控制。
这种可变气门正时系统可以根据发动机的工况需求,调整气门的开启和关闭时机,以提高发动机的燃烧效率和动力输出。
电子凸轮控制器的优势在于可以根据工况需求实现气门的精确控制,使发动机在不同工况下实现最佳的燃烧效率和动力输出。
例如,在低负载工况下,可以延迟气门关闭的时机,减小压缩行程,降低泵损功率,以提高燃油经济性;在高负载工况下,可以提前气门关闭的时机,增加膨胀行程,提高动力输出。
此外,电子凸轮控制器还可以实现随着发动机转速的提升,逐渐调整气门正时角度,以满足不同转速下的最佳正时要求。
总之,电子凸轮控制器通过电子芯片控制凸轮轴的运动,实现对气门开闭时机和时长的精确控制,以提高发动机的燃烧效率和动力输出。
其主要应用在发动机的可变气门正时系统中,可以根据工况需求灵活调整气门的开启和关闭时机,以提高发动机的性能和燃油经济性。
电子凸轮控制器的原理及应用

电子凸轮控制器的原理及应用电子凸轮控制器(Electronic Cam Controller,ECC)是一种用于控制发动机气门开启和关闭时间的先进技术装置。
它通过电子控制系统,能够实现对气门开启和关闭时间的精确控制,从而提高发动机的燃烧效率和动力输出。
本文将对电子凸轮控制器的原理及应用进行详细介绍,以便读者对该技术有更深入的了解。
首先,我们来看一下电子凸轮控制器的原理。
电子凸轮控制器是通过一套电子控制系统来实现对气门开启和关闭时间的精确控制的。
在传统的发动机中,气门的开启和关闭时间是由凸轮轴上的凸轮来决定的,而凸轮的形状决定了气门的开启和关闭时间。
但是,这种机械式的控制方式存在着很大的局限性,无法适应发动机在不同工况下的需求。
而电子凸轮控制器则通过传感器实时监测发动机的工况,将监测到的数据传输给电子控制单元(ECU),ECU根据这些数据来控制气门的开启和关闭时间。
这样一来,就可以根据发动机的实际工况来实现气门开启和关闭时间的精确控制,从而提高发动机的燃烧效率和动力输出。
接下来,我们来看一下电子凸轮控制器的应用。
电子凸轮控制器主要应用于高性能发动机和节能型发动机中。
在高性能发动机中,电子凸轮控制器能够实现气门的快速开启和关闭,从而提高发动机的输出功率和扭矩。
而在节能型发动机中,电子凸轮控制器则可以根据车辆的实际工况来调整气门的开启和关闭时间,以实现最佳的燃烧效率和燃油经济性。
此外,电子凸轮控制器还可以实现可变气门升程和可变气门正时等功能,从而进一步提高发动机的性能和燃油经济性。
通过对气门开启和关闭时间的精确控制,电子凸轮控制器能够使发动机在不同工况下都能够实现最佳的性能和燃油经济性,从而满足车辆在不同行驶状态下的需求。
总的来说,电子凸轮控制器作为一种先进的发动机控制技术,能够实现对气门开启和关闭时间的精确控制,从而提高发动机的燃烧效率和动力输出。
它的应用范围广泛,可以满足高性能发动机和节能型发动机在不同工况下的需求。
电子凸轮原理
电子凸轮原理
电子凸轮是一种用于控制发动机气门活动的技术,通过电子信号来替代传统的机械凸轮轴。
其工作原理基于发动机控制单元(ECU)的指令,通过调节发动机气门开启和关闭的时间、持续
时间和升程来改变气门的工作方式。
电子凸轮系统由电子控制单元、传感器和执行器组成。
传感器监测发动机的速度、负载、温度等参数,并向电子控制单元提供反馈信息。
电子控制单元根据这些信息和预设的程序算法来确定每个气门的开启和关闭时机。
执行器则负责控制进气和排气凸轮的运动。
在正常工作条件下,电子凸轮的工作过程如下:当ECU接收
到油门输入信号后,根据发动机的工作状态来计算出最佳的气门开启和关闭时机。
然后,电子控制单元通过发送电信号来激活执行器,执行器会根据电信号的指令来控制凸轮的转动。
这样,气门就会按照预设的时间和升程来开启和关闭,从而实现精确的气门控制。
电子凸轮的优点是可以实现更准确的气门控制,提高发动机的燃烧效率和动力性能。
此外,电子凸轮还可以根据不同驾驶要求和环境条件来进行调整,提供更好的驾驶体验和燃油经济性。
另外,由于电子凸轮无需机械传动,可以减少发动机的摩擦损失,提高机械效率。
尽管电子凸轮具有许多优点,但其成本较高,对传感器和执行器的要求也较高。
此外,电子凸轮系统也需要更复杂的控制算
法和更高的可靠性要求。
因此,在实际应用中,电子凸轮系统仍然面临一些挑战和问题需要解决。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电子凸轮的市场推广 • 应用行业
纺织行业,如细纱机改进;印刷包装行业,如高速模切机 (裁剪机)、胶印机/套印机;高速绕线机;高速肥皂切 割机;自动机床;等等。
• 产品特点
主要从控制精度高;可靠性高,方便安装、调试和修正; 电子化、数字化系统控制趋势;高速、高效特性等方面进 行宣导和推介。
• 用户选型
谢谢! 祝您成功!
• 机械凸轮的缺陷:
1)控制精度低 2)可靠性差 3)修改角度值不方便
电子凸轮
• 利用角度位置传感器来模拟机械凸轮各控制点的 角度范围,并能独立输出各自的控制信号,此种 设备称为电子凸轮,包含“机械凸轮+微动开关” 的基本功能。
• 基本组成:
1.绝对式编码器:检测实际运行角度或旋转位置; 2.设置单元:预设起始角度和终止角度数值; 3.控制单元:MCU程序处理、控制中心; 4.存储单元:预设角度值,实际角度值的记忆; 5.显示单元:设置界面,运行指示界面; 6.执行单元:独立输出各路控制信号。
电子凸轮基本知识
概 述
• 机械凸轮+微动开关
组成“机械-电子凸轮”箱,应用于“有循环往复运行特点”的自 控设备中,比如刨床、啤酒罐装、纺织机械等。 这种循环往复性一般是以一个周期即0°-359°为基准,周而复 始...而在每一个周期内,设备中有若干个控制点(即多组开关),它 们都严格在属于自己的角度范围内动作,且彼此间相互独立。 比如啤酒罐装,假如在一个周期内,“注酒”控制点的信号为 60°-120°,那么设备一旦运行到60°时,则输出一“注酒”控制 信号,且一直保持到120°为止,表明一罐啤酒已注满,该动作结束。
主要从编码接口)等方面同客户商讨。
AND电子凸轮状况
• 可代理产品:多摩川smartcam系列 请参阅data sheet 或 specifications • 自主研发产品:ACM-28CH-SW-24V 基本方案: SA系列绝对式编码器+28通道控制点+开 关量(光偶+固态继电器)输出信号 + 低成本设计架构。 设计规划:进行中......
电子凸轮精度与绝对值编码器分解能之间的关系 • 电子凸轮精度Δ
即:可以识别的最小角度单位,如1°,0.5°,0.1°... • 电子凸轮的有效状态N 与精度Δ有关: 如Δ=1°,则N=360,即N=0° 1° 2° ......358° 359° 如Δ=0.5°,则N=720,即N=0° 0.5° 1° ......359° 359.5° • 编码器分解能M 取决于编码器的BCD输出位数,如10-bit BCD码 则M=360/210 =0.35° • 电子凸轮的无效状态 综合编码器和凸轮精度要求,将无法识别的 状态利用设计软件去除掉,以提高电子凸轮 的响应速度。
主要功能和特点
• 可以输出多路控制开关量(ON/OFF),且 每路都可以独立预设起始、终止角度。 • 可以动态检测和显示实际运行角度,对设 备运行和再调整实时检测。 • 可以随时修改预设角度,且每一路均有 LED状态指示,“开态”点亮,“关态” 熄灭。 • 各路输出信号在电气上相互隔离,抗干扰 能力强,可靠性高。 • 动作精度可达到 1° typical
电子凸轮的基本实现
• 各控制点“动作角度范围”的实现 利用绝对值编码器,安装于设备减速机的主轴上,以 达到与设备运行“同步”的要求。 而绝对值编码器可以动态检测设备运行的实际角度, 在设备调试时,可以通过LED显示数值,进行各个控制点 的初预设--修正--再预设...直至正常运行。 • 控制中心单元 包含电子凸轮的信号处理、设置操作、显示界面、输 出接口等,组装于一屏蔽壳体内,即CASE结构体。 • 各控制点执行结构 由CASE输出各控制点的“开关”信号,连接到各控制 点的驱动、执行结构,产生多个预设的动作,从而实现 “电子凸轮”的基本功能。