跨河高程传递 精密三角高程测量代替一二等水准测量方法
精密三角高程代替二等水准测量在山区铁路勘测中的运用

每公里高 差的 2 倍 中误差( mm)
表 1 三角高程精度表
竖直角( °)
边长( m) 1
3
5
7
9 11 13 15
100 0. 556 0. 556 0. 581 0. 616 0. 659 0. 709 0. 765 0. 824
200 0. 772 0. 772 0. 781 0. 795 0. 813 0. 835 0. 86 0. 888
由全站仪对向观测原理可得 A、Z1、Z2…. B 之间的高
差分别为: hZ1A = SZ1A × sinαZ1A + iZ1 - tA
} hZ1Z2 = SZ1Z2 × sinαZ1Z2 + iZ1 - tZ2 hZ1Z2 =
hZ2Z1 = SZ2Z1 × sinαZ2Z1 + tZ2 - tZ1 ( SZ1Z2 × sinαZ1Z2 - SZ2Z1 × sinαZ2Z1 ) /2 +
+ sZnZn-1 × cosαZnZn-1 × mαZ2nZn-1 ÷ ρ) 2 + ( sinαZnZn-1 × msZnZn-1 ) 2]
+ ( sZnB × cosαZnB × mαZnB ÷ ρ) 2 + ( sinαZnB × msZnB ) 2
由于起始站和终点站的距离很短,且竖直角要求尽可
( iZ1 + tZ1 ) /2 - ( iZ2 + tZ2 ) /2…… hZn-1Zn = ( SZn-1Zn × sinαZn-1Zn - SZnZn-1 × sinαZnZn-1 ) /2 +
( iZn-1 + tZn-1 ) /2 - ( iZn + tZn ) /2# hZnB = SZnB × sinαZnB + iZn - tB 由以上所求高差得 A、B 间高差为: hAB = - hZ1A + hZ1Z2 + hZ2Z3 + . . . . + hZn-1 + hZnB 因为目标高为同一个棱镜目标高一致,由 tA = tB 得: hAB = - SZ1A × sinαZ1A + ( SZ1Z2 × sinαZ1Z2 - SZ2Z1 × sinαZ2Z1 ) /2 + ( SZ2Z3 × sinαZ2Z3 - SZ3Z2 × sinαZ3Z2 ) /2 + . . . + ( SZn-1Zn × sinαZn-1Zn - SZnZn-1 × sinαZnZn-1 ) /2 + SZnB × sinαZnB 2. 4 精度分析
三角高程替一等水准在水电站跨河测量中的应用
的到位,恢复生态环境;水电站在运行期间,要对区域内的珍稀动植物进行妥善保护,并对运行过程中的生态环境实施动态监测。
4.5创新水电开发技术要进一步发展水电,对水电开发技术进行创新发展是必不可少的。
要提高水电环境保护技术及工艺,研发新的开发技术,提高工程施工人员及运营管理人员的专业素质,完善对水资源的保护利用措施。
积极引进先进技术、设备和人才,加强国际水电工程交流,深入研究环境保护管理措施,监督移民安置区环境保护工作。
4.6做好移民安置工作在进行水电开发时,若不能解决好移民问题,将会对环境形成二次破坏。
因此必须完善移民政策,要将搬迁安置、扶持发展与水电开发有机融合起来,为移民群众脱贫致富提供良好的机遇,构建和谐社会。
5结语水电开发是缓解能源压力、改善水资源分布不均的重要途径,对水电进行科学合理的开发能够改善能源结构、维护生态环境。
环境对人们的生活有着极大的影响,因此在水电开发过程中,不能忽视对环境的保护,要合理适度的开发水资源,从水电开发的规划设计、施工以及之后的运行和管理上都要重视生态环境的保护,创新并完善水电开发技术,减少水电工程对环境造成的不利影响,实现水电建设的可持续发展。
参考文献[1]吴世勇,申满斌,孙文良.水电开发征地移民政策和管理环境分析[J].水力发电学报,2011,30(3):191~194.[2]单婕,顾洪宾,薛联芳,等.水电开发环境保护管理机制分析[J].水力发电,2016,42(09):1~4.[3]张周锐,和哓荣.论水电资源开发中的环境保护选择[J].工业c ,2016,28(9):160.收稿日期:2017-8-15作者简介:周铁柱(1982-),男,高级工程师,本科,主要从事水利水电工程规划设计工作。
三角高程替一等水准在水电站跨河测量中的应用周中杨(国家电投集团贵州金元股份有限公司,贵州贵阳550081)【摘要】在跨度较大的大江大河,如何将两岸高程通过一定的办法进行高精度传递,其方法尤为重要。
跨河高程传递 精密三角高程测量代替一二等水准测量方法

跨河高程传递精密三角高程测量代替一二等水准测量方法作者:郑林来源:《地球》2013年第11期[摘要]跨河高程传递的测量技术有很多,本文主要简述了精密三角高程的方法来代替一二等水准测量方法的过程,国家一、二等水准测量规范》(CB/r12897-2007)规定了精密三角高程法跨河水准测量的作业方法。
此方法应用于长距离三角高程多个项目大桥高程控制网。
探讨了一下其中几个比较关键的问题,三角高程测量的误差来源及精度,得出了减弱各项误差从而提高精度的一些相关结论。
[关键词]跨河高程传递精密三角高程二等水准测量[中图分类号] P216 [文献码] B [文章编号] 1000-405X(2013)-11-106-2目前高程测量方法一般分为几何水准测量、GPS水准测量和三角高程测量三大类。
用传统水准的方法测定点与点之间的高差,所得到的地面点高程精度较高,普遍用于建立国家高程控制点。
跨河三角高程测量以它的测量时间、生产效率优于几何水准测量得以广泛应用,尤其在山区、水域作业,几何水准测量困难,精密三角高程测量发挥了很大优势,解决了几何水准测量难以解决的高程传递问题。
随着科技的发展,例如莱卡TC2002、TCA2003测距测角的精度大大提高。
通过一定的测量方法又可以减弱或者消除三角高程测量中各种误差源的影响,从而达到高等级水准测量的精度。
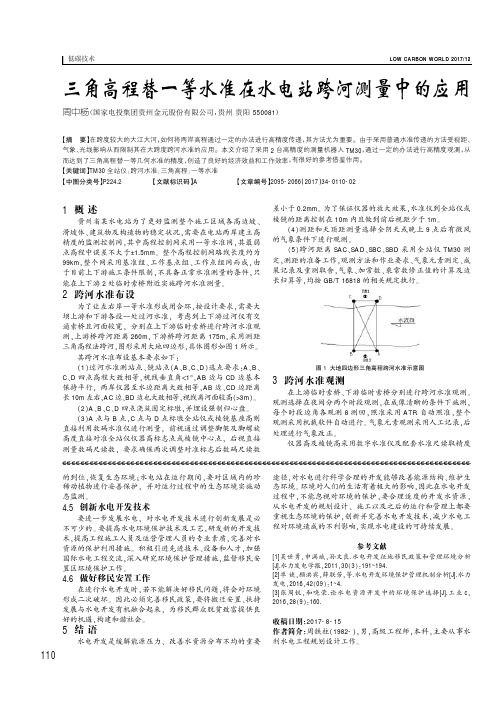
1具体跨河精密三角高程作业方法现行《国家一、二等水准测量规范》规定,精密三角高程法跨河水准测量作业应布设成大地四边形,跨海测量既是通过该方法对近海海岛进行高程传递。
如图l所示。
该图形由四条跨河边构成三个独立的闭合环。
具有检核条件较多的优点。
①水准仪测定本岸站点间高差hAB和hCD。
②用全站仪测量测站点问距离D-AC、D-AD、D-BC、D-BD。
③垂直角观测程序:(a)A、C两点设全站仪,B、D两点设标尺,首先观测本岸近标标定仪器高,测定bB,bD然后同步观测对岸远标尺,测定aAD、aCB;(b)A 点仪器不动,C点移到D点,同步观测对岸远标尺,测定aAC、aDB;(c)D点仪器不动,同步观测对岸远标尺,测定aBC、aDA;(d)B点仪器不动,观测本岸近标尺,测定bA,再将D点仪器移回到C点,同步观测对岸远标尺,测定aBD、aCA,最后,c点仪器观测本岸近标尺。
43 精密三角高程代替一等水准测量的研究
精密三角高程代替一等水准测量的研究张正禄1 邓 勇1 罗长林1 胡绪清2(1 武汉大学测绘学院,武汉市珞喻路129号,430079) (2 湖南省测绘局质检站,长沙市韶山中路693号, 410007)摘 要:通过对三角高程测量的原理、误差来源及精度分析,指出了用三角高程测量代替一等水准的关键问题,第一次提出了在特定条件下用三角高程测量代替一等水准不仅完全可行,而且具有经济效益;并在生产实践中得到了验证。
本文所研究的内容和得出的结论对制定有关规范和生产实践具有重要参考意义和实用价值。
关键词:电磁波测距;三角高程测量;一等水准;变形监测随着电子全站仪的普及,电磁波测距三角高程测量(以下简称三角高程测量)以其快速、简便和经济等优点在测绘中得到越来越多的应用,目前用三角高程代替三、四等水准测量已列入规范和用于生产,取得了明显的经济效益。
由于三角高程测量受仪器精度(主要指斜距和高度角的测量精度)和外界因素如大气折光的影响,在精密高程测量中还无法代替一等水准测量。
本文提出在某些工程中,三角高程测量是可以代替一等水准的。
在分析主要误差影响的基础上,指出了三角高程代替一等水准应具备的条件和需要注意的关键问题。
通过研究和试验,得到了验证。
目前在大坝等一些工程的水平和垂直位移监测中,都是采用二等甚至一等几何水准的方法获取点位高程。
这类安全监测网,都需要周期性监测,有许多先验信息(如点的平面位置、高程、点间距离、高差及其变化范围等)可以利用。
由于受地形条件的影响和安全监测网本身的需要,一些网点埋设在较高的陡坡上,水准作业十分困难和危险,不仅花费的经费、时间较多,而且其观测条件也不满足一等水准测量规范。
对于这种情况,采用精密三角高程来代替一等水准不仅需要研究,而且也完全可行。
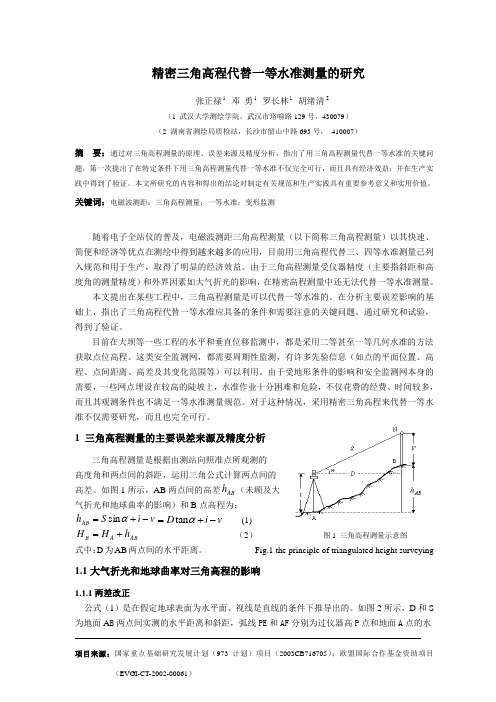
1 三角高程测量的主要误差来源及精度分析三角高程测量是根据由测站向照准点所观测的 高度角和两点间的斜距,运用三角公式计算两点间的 高差。
如图1所示,AB 两点间的高差AB h (未顾及大 气折光和地球曲率的影响)和B 点高程为:v i S h AB -+=αsin v i D -+=αtan (1)AB A B h H H += (2) 图1 三角高程测量示意图 式中:D 为AB 两点间的水平距离。
精密三角高程测量代替二等水准测量的尝试

2 0 1 4 年 3 月
江苏科技信息
J i a n g s u S c i e n c e& T e c h n o l o g y I n f o r ma t i o n
No. 6
Ma r c h, 2 01 4
精密 三角高程测 量 代替 二等水准测量 的尝试
响很 , J 、 。
图 3 觇标 的改 进 原 理
田儿 1 口 J 划 伏 口 J 借 :
②测角误差 ‰ 对高差影 响随着水平距离的增加 成正 比例 增大 , 其影 响远远 超过测距误差 , 是制约高差精度 的主要 误差
来源。
t a n 卢 = 争
t … :旦 ( 1 1 )
日l = 日o +Ah l — i l ( 2)
单向观测三角高程测量精度分析高差的计算 公式 如式 ( 7 )
所示 :
a h = s s i n + ( 1 一 ) 曼
+ 一
( 7 )
式中:
△ 一三角高程测量 的高差 ;
s —仪器 到棱镜 的斜距 ;
△HA 口 =h 0 l + l 2 +… + 坍
=
A h l - / t h ^ + △ ^ r△ 1 + …+ A h B — A h + i 一i B
( 6 )
从式 ( 6 ) 可看出 , 在求得点 A和点 日高差 的过程 中已消去
了转点棱镜 高 , 并且 与仪器高无关 , 也就不存在 量取仪器高 的 问题 , 只需精确量取起 点和终点 的棱镜 高 , 从 而大大减小 了量
三角高程测量是 指 由测站 向照准 目标观测垂直 角和它们
之间的水平距离或者斜距 , 计算测站点与照准点 间高差 的一种
探讨三角高程测量代替二等水准测量的方法
3. 3 园林植物与道路的结合
园林道路主路应以乔木为主 , 适当配置少量花灌木 , 形成特 色的景观 ,如银杏路 、 合欢路等 ;较长的道路上 ,可以用多种植物进
Discussion the garden2plant scenery
WANG Ai2fen Abstract : Aiming at t he importance of plant scenery design , t he plant scenery design principle was discussed. The plant scenery building met hods were detail introduced , t he combination of plants wit h ot her garden elements was studied so as to use rationally garden plant scenery and created t he plant space not only agree wit h plant ecology and outlook charming , healt hy , beautiful. Key words : plant landscaping , urban landscape design , garden element
中间法三角高程测量在二等跨河水准中的应用

49智慧地球遇NO.152020智能城市INTELLIGENT CITY 中间法三角高程测量在二等跨河水准中的应用焦川川(湖南省地质矿产勘查开发局402队,湖南长沙410008)摘要:根据三角高程测量原理和误差传播律,推导全站仪中间法三角高程误差模型。
根据公式和表格分析评价仪器精度、视距、俯仰角、大气折光等误差对高差精度的影响,探讨三角高程代替常规二等水准的可行性,并通过实例说明如何合理利用现场条件,降低施测难度,提高观测精度。
关键词:跨河水准;中间法三角高程;二等水准;自动照准水准测量过程中,当水准测量线路较长时,经常会遇到河流两岸水准点联测的情况。
当河流宽度超过100m而附近又无合适桥梁及隧道时,常规水准难以直接施测。
此时可根据现场具体条件选用经纬仪、GPS接收机或全站仪等设备进行跨河水准测量。
1三角高程测量原理传统的全站仪三角高程测量方法具有以下特点:1)全站仪必须安置在已知高程点,待测点要与已知点通视;(2)要测出待测点的高程,需要钢尺量取仪器高和棱镜高,误差约在2~3mm;(3)一般距离超过200m后必须考虑地球曲率和大气折光对高差测量的影响。
根据双差改正公式可知,双差改正值与视距的平方成正比。
基于以上原因,为提高观测精度,减弱不利因素影响,跨河水准通常在河道两岸布设成平行四边形或大地四边形,通过多次设站,进行多余观测,操作烦琐。
采用全站仪中间法三角高程测量时,仪器架设在两个观测点中间,在两端水准点上同时竖立固定高棱镜。
通过测量两个棱镜的相对高差及前后视棱镜杆之间的高差可以推算出两水准点的高程差异。
此种方法作业简单,能够提高观测效率,保证精度。
如图1所示。
为测定A、B点之间的高差h AB,在A、B两点上竖立棱镜,后视A点棱镜测得斜距S后(或平距Q后)和垂直角a后,前视B 点棱镜测得斜距S前(或平距Q前)和垂直角a前,则A点至B点的高差为:h A B=(S前s in a前_S后sin a后)-(%_v后)+式中:v后、v前后视和前视的棱镜咼;k后、k前后视和前视观测时垂直大气折光系数;R—地球平均半径。
毕业设计全站仪三角高程测量代替二等水准测量的实测方案

第1章绪论1.1 引言在当今的高程测量中。
几何水准测量是高程测量的最主要方法之一。
但是,普通的几何水准测量的速度比较慢。
虽然国外有使用自动化水准测量。
但是也没有显著提高它的效率,并且需要的劳动强度大。
另外,在长倾斜路线上还受到垂直折光误差累积性影响。
当前、后视线通过不同高度的温度层时,每公里的高差中可能产生系统性影响。
尽管现在已有不少的研究人员提出了一些折光差改正的计算公式,但这些公式中仍然还存在系统误差。
并且,近年来还发现地球磁场对补偿式精密水准仪也有很影响。
此外,几何水准测量的转点多,而且标尺与仪器也存在下沉误差,这又是一项系统误差。
由于上述原因,如果在丘陵、山区等地使用几何水准测量进行高程传递是非常困难的,有时甚至是不可能的。
但是如果采用三角高程就可以比较容易实现。
三角高程测量是根据由测站向照准点所观测的垂直角和它们之间的斜距,计算测站点与照准点之间的高差。
近些年来,由于测量仪器的发展,使得测角、测距的精度不断提高,再加上不少学者对三角高程测量的深入研究,使三角高程测量的精度也有很大的改善。
而又由于三角高程测量传递高程比较灵活、方便、受地形条件限制较少的优点,使三角高程测量得到广泛的应用。
影响三角高程测量精度的主要原因有竖直角测量精度和测距精度,大气折光、地球曲率等。
要想用三角高程测量代替高等级的水准测量,那么就必须提高三角高程测量的精度和可靠性。
随着科学技术的发展,测绘类的仪器在各方面也都有很大的发展,其精度和性能也都越来越好,大大的提高了精密三角高程测量可行性。
就目前而言,徕卡TC1201全站仪,其静态测角精度可达到±1″,测距精度为2mm+2ppm。
能够自动追踪目标,距离可达3000m。
通过使用先进的仪器和科学的计算方法及测量方案,在适当的环境下,三角高程测量的精度或许能够达到二等几何水准测量的要求,使得三角高程测量代替二等水准的应用的研究成为可能。
1.2 研究现状三角高程测量方法一直以来都被测量人员所关注,特别是随着科技的发展,全站仪得到广发的发展和应用,国内外广泛开展了EDM三角高程测量的研究,并取得很大的进展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
跨河高程传递精密三角高程测量代替一二等水准测量方法
[摘要]跨河高程传递的测量技术有很多,本文主要简述了精密三角高程的方法来代替一二等水准测量方法的过程,国家一、二等水准测量规范》(CB/r12897-2007)规定了精密三角高程法跨河水准测量的作业方法。
此方法应用于长距离三角高程多个项目大桥高程控制网。
探讨了一下其中几个比较关键的问题,三角高程测量的误差来源及精度,得出了减弱各项误差从而提高精度的一些相关结论。
[关键词]跨河高程传递精密三角高程二等水准测量
目前高程测量方法一般分为几何水准测量、GPS水准测量和三角高程测量三大类。
用传统水准的方法测定点与点之间的高差,所得到的地面点高程精度较高,普遍用于建立国家高程控制点。
跨河三角高程测量以它的测量时间、生产效率优于几何水准测量得以广泛应用,尤其在山区、水域作业,几何水准测量困难,精密三角高程测量发挥了很大优势,解决了几何水准测量难以解决的高程传递问题。
随着科技的发展,例如莱卡TC2002、TCA2003测距测角的精度大大提高。
通过一定的测量方法又可以减弱或者消除三角高程测量中各种误差源的影响,从而达到高等级水准测量的精度。
1具体跨河精密三角高程作业方法
现行《国家一、二等水准测量规范》规定,精密三角高程法跨河水准测量作业应布设成大地四边形,跨海测量既是通过该方法对近海海岛进行高程传递。
如图l所示。
该图形由四条跨河边构成三个独立的闭合环。
具有检核条件较多的优点。
①水准仪测定本岸站点间高差hAB和hCD。
②用全站仪测量测站点问距离D-AC、D-AD、D-BC、D-BD。
③垂直角观测程序:(a)A、C两点设全站仪,B、D两点设标尺,首先观测本岸近标标定仪器高,测定bB,bD然后同步观测对岸远标尺,测定aAD、aCB;(b)A点仪器不动,C点移到D点,同步观测对岸远标尺,测定aAC、aDB;(c)D点仪器不动,同步观测对岸远标尺,测定aBC、aDA;(d)B点仪器不动,观测本岸近标尺,测定bA,再将D点仪器移回到C 点,同步观测对岸远标尺,测定aBD、aCA,最后,c点仪器观测本岸近标尺。
至此,第一仪器位置的观测结束,2台仪器共完成4个单测回的观测量。
④观测员、仪器、标尺相互调岸,按上述观测程序完成第二时段仪器位置的观测。
每条边均按单向观测进行高差计算,公式为:
式中:D为跨河点问的水平距离;Iv为垂直角;i为仪器高;v为照准高度.k
为大气垂直折光系数;R为地球曲率半径;f为球气差。
对于(1)式全微分,由误差传播定律得高差中误差计算公式为:
由(2)公式可以看出,三角高程法跨河测量的主要误差为:距离测量误差、垂直角观测误差、仪器高和照准高量测误差以及球气差的影响。
①代测距精度对跨河高差的影响很小,取a=1°、k=0.2、R=6368km、D=2.0km、mD±1mm+1ppm·D时,其影响m△h<0.1mm。
②仪器高和觇牌高可采用间接测定,公式同(1)式,当D=10m、a=l°、mD=±2mm时,其影响m△h<0.1mm。
③垂直角观测使用0.5″级全站仪,mα=0.7″、D=2.0km时,一测回垂直角误差影响为m△h=6.8mm,则16测回的垂直角观测对跨河高差的影响为±1.7mm;垂直角观测误差影响是较大的。
④取用D=2.0km、R=6368km,按经验值mk=0.02时,m△h=D2/2R·mk=6.28mm,垂直折光的影响是很大的。
由上述可知,影响跨河高差的主要因素是垂直角观测误差和球气差变化的影响。
国家规范规定的作业中,同一条边单程观测均间隔两次搬站和两组观测的时间,因不同的观测时间而使球气差存在变化,极大地影响r高差的测量精度。
由于太阳日照和大气气温的周日变化而使大气折光变化、近水面大气湍流作用、江面船只运行等因素,使球气差变化相当复杂且影响整个观测过程。
致使实际作业超限成果较多,成果不容易合格。
2改进作业方法
规范作业方法的不足之处.结合一测回作业过程,对4个观测组进行剖析,按每条边单程观测组2台仪器均同时观测来考虑,可得出图l中同步对向观测①②③④组的分解作业过程。
利用闭合环的闭合条件,由近标尺读数、本岸点间水准高差和远标尺观测高差推导出同步对向观测的高差及计算公式。
以①组为例,A、C设站时,可得BD问高差。
计算公式为:
同理可得同步对向观测②组、③组、④组的计算公式。
由(3)可得出同步对向观测的跨河水准高差中误差的计算公式为:
因此,为保证跨河高差精度,可采用增加垂直角测回数、提高照准精度、两岸尽可能等高.使垂直角为小角度的方法来减小垂直角观测误差的影响;采用同步对向观测并尽量缩短观测时间,以减弱不对称垂直折光的影响。
927跨海作业采用2台徕卡TCA2003全站仪同步施测,照准标志采用专用跨河水准测量灯标。
每半测回均实测:上下灯标有效垂直角8组,每组垂直角均由对讲机联系同时观测,同步筹异不超过30”。
测回垂直角互差不能大于4″,最后取测回高差中数,带入大地四边形进行顺时针高差闭合差的计算。
仅一项测角精度的提高,就使得精密三角高程测量实现跨河水准更为容易。
距离不超过2000m的情况下,可以达到国家二等水准测量的精度;跨河距离小于1000m时,垂直角控制在10°以内,可以满足国家一等水准测量的要求
3结束语
跨河三角高程测量可以很容易实现国家二等水准测量。
此外,精密三角高程法跨河作业需在两岸合理布置跨河点、合理的观测方法相当重要。
实际作业中需注意以下几个方面:①选择跨河场地时,需保证跨河视线高度;②宜在阴天有微风的天气和合适的观测时段同步进行观测;③长距离跨河观测条件一般不太好,提高照准精度尤为重要,宜使用可调亮度灯标来满足昼夜观测和精确照准需要;④避免东西向布置测线,最好两岸使用观测墩。
在工程测量中采用三角高程代替水准高程,这些方法既省时又省力还省财,提高工效,保证精度。
参考文献
[1]鲁立新.三角高程测量方法的几点探讨[J].科技创新导报,2010,(35):91-91.
[2]罗彩霞,朱少刚.三角高程测量方法研究[J].山西大同大学学报:自然科学版,2010,(5):72-74.
[3]谈道隆,蒋铁军,东海宇.气象条件对三角高程测量精度的影响[J].甘肃科技,2010,(14):41-43.。