28米混合臂高空作业车上车结构有限元分析
基于ANSYSWorkbench优化高空作业车支腿结构

基于ANSYS Workbench优化高空作业车支腿结构发布时间:2021-04-02T02:37:06.554Z 来源:《中国科技人才》2021年第5期作者:李金柱[导读] 制定有限元分析方案,确定边界条件,对原支腿模型及取消加强板后的支腿进行有限元分析。
徐州海伦哲专用车辆股份有限公司江苏徐州 221004摘要:高空作业车具有作业效率高、升空便利、机动性强、作业范围大、机械强度高等优点,其市场需求量近年来正急速增长。
支腿作为高空作业车的重要支撑部件,不仅需要足够的刚度和强度,还应避免支腿加工困难及过于笨重。
本文通过ANSYS Workbench虚拟分析和对比整改方案效果,得出高空作业车支腿结构优化方案。
关键词:ANSYS有限元分析支腿结构;支腿结构优化引言为保证足够的支腿强度,目前支腿内部设置了加强筋板,在焊接加强筋板时容易产生支腿变形且焊后不易调平,因此有必要进一步优化支腿结构。
由于该加强筋板处于水平腿的搭接段,为节约成本及考虑便于生产加工,现提出初步解决方案(如图1所示):将上下盖板由10mm厚增加为12mm厚,并取消内部加强筋板。
为保证产品安全、性能可靠,本文通过ANSYS Workbench有限元软件分析和对比解决方案对支腿刚度和强度的影响,以确定解决方案的可行性。
1、整体分析思路1)制定有限元分析方案,确定边界条件,对原支腿模型及取消加强板后的支腿进行有限元分析。
2)通过对分析结果的后处理,得出各部分应力分布情况和位移大小,对比结果制定具体改进方案。
3)对改进后的支腿进行有限元分析,对比两者分析结果,得出结论。
2、有限元分析2.1、模型前处理为方便计算保证计算结果的准确性,我们对模型进行合理的简化(如图2所示):删除螺纹孔安装孔、倒角、部分垂直腿、填充焊缝并保留了对截面影响较大的孔。
在支腿与活动腿箱接触处增加垫块以模仿腿箱。
对模型进行离散化处理,主要采用solid186、solid187单元,设置整体网格为尺寸为20mm,上下盖板、侧板、加强版(条)、垫块进行网格细化,保证其在厚度的方向使用有不少于两层网格。
重型车车架组合结构的有限元分析

按照实际试验和经验算法, 以垂直静力弯曲和 弯扭组合 2 种工况计算了车架的应力, 研究了货物 载荷的偏置及超载对车架应力的影响。重型车如遇 实际所承载荷过大、 路面不平及车速较高等因素 , 致 使行驶中的车架受到比较频繁的扭转和重载 , 很可 能会使得局部连接板区域及相关支架位置产生应力 集中, 从而产生车架的断裂破坏。 模态分析得出了该重型车车架的固有频率和振 型。计算表明, 车架在自然约束条件下低阶频率范 围在 9~ 45 H z, 车架振型表现为垂直弯曲、 面内弯 曲、 扭转及弯扭组合特征。 参考文献:
2
车架有限元模型的仿真数据分析
车架钢板弹簧座 处每个节点的垂直位移被约
束 ; 在车架的左右对称面上 , 选取 2 个节点分别进行 水平面内纵、 横向的附加约束, 就可以求出变形引起 的节点位移。模型计算的静载荷包括驾驶室及驾乘 人员, 发动机及油箱, 货厢及货物。前面 2 种为集中 载荷, 在建立有限元模型时将作用点设置在节点上, 程序可以直接叠加到结构载荷向量中去 ; 货厢及货 物为均布载荷, 在有限元分析时 , 程序将它们放置到 单元节点上 , 形成单元节点力向量, 然后经由单元载 荷乘子 , 把载荷情况叠加到结构载荷向量中去。 弯扭组合状态即在钢板弹簧座的左前、 右后分 17
《机械与电子》2005( 2)
M PC 类型 R BE2 R BE3 Expl icit
[ 2]
图 1 板簧的简化
还有导向作用( 图 1b) , 即钢板弹簧在各个方向上均 有刚度 , 但其它方向上的刚度要比垂直方向的刚度 大得多 , n 、 p 节点间为一刚性梁[ 3] 。节点 m 和 n , p 和 q 之间弹簧元的刚度分别为 y K / ( x + y ) 和 x K / (x + y)。 与支架位置相关联的弹簧单元支承点, 取在连 接销的中心点位置, 这样有助于模拟板簧对支架位 置的弯矩作用。如图 2、 表 1 所示, 弹簧元的上端点 与该中心点之间建议采用 RBE2 或 RBE3 型多点约 束 , 以实现连接点的位移协调或总力平衡。
9高空作业车部件伸缩臂结构分析设计
66
2012 年供电企业带电作业技术研讨会论文集
二位二通电磁阀。两处电磁换向阀分别由设在支腿处的接近 开关和设在臂支架处的行程开关控制, 实现支腿没有支撑稳固时,无法操作工作臂;工作臂离开臂支架后,即使操纵下车多路阀也不能收 支腿。避免由于误操作造成作业车的倾翻。
图 1-2 16 米高空作业车液压系统图 1.4.3 电气系统
高空作业车变幅是指改变工作平台到回转中心轴线之间的距离,这个距离称为幅度。变幅机构 扩大了高空车的作业范围,由垂直上下的直线作业范围扩大为一个面的作业范围。高空作业车变幅 机构一般采用液压油缸变幅。
高空作业车的一部分(一般指上车部分或回转部分)相对于另一部分(一般指下车部分或非回 转部分)做相对的旋转运动称为回转。为实现高空作业车的回转运动而设置的机构称为回转机构。 它是由液压马达经减速器将动力传递到回转小齿轮上,小齿轮既作自转又作沿着固定在底架上的回 转支承大齿圈公转,从而带动整个上车部分回转。有了回转运动,从而使高空作业车从面作业范围 又扩大为一定空间的作业范围。
高空作业车按其行走方式分为两大类,即采用专用汽车底盘的车载式高空作业车和采用四轮驱 动自走行式的高空作业车。采用改装汽车底盘的车载式高空作业车按其结构方式又可分折叠壁式高 空作业车、直臂式高空作业车和混合壁式高空作业车以及剪叉升降式高空作业车;按其工作性质又 可分绝缘式高空作业车和非绝缘式高空作业车。按领域分举高平台消防车、油田井架维修车、航空 食品装运车等。四轮驱动自走行式的高空作业车,同样按臂的结构也分为: 折叠壁式、直臂式及混 合壁和桅杆式等。
多功能高空作业平台伸缩臂的有限元分析与优化
() 1 , 5 . 则许用应力 为 : ]331 = 3 . a ' = 3/.= 5 . 5 [ = 5/. 2 53 o ]2 51 167 1 5 MP z 5
式 中:△ } { “ —单元 8 个节点的位移向量 ;Ⅳ] [ —形函数矩阵。
任一点的应变位移的关系为 :6 I { “}e {k= N]△ ‘ "} /
重 物 惯性 阻 转矩 T=  ̄ a 1 3 I :2P  ̄ = 5 N‘ p n
() 1
( 2)
旋转轴的摩擦转矩 T=y+ T= 2 7 I :3 T 2 ̄ 6 . N。 6 n 坡度转矩 T= os a i l3 6 2 I :4P ci s  ̄ = 7 . N。 n n 9 n
21 7
3伸缩臂的有 限元分析
31接触 单元分 析及 其方 程 .
设接触单元的厚度为 e局部坐标系 ( t的原点取在单元 , mn)
f Au 1
2两种工况来研究。 ) 约束第一节立柱的底部各节点在 U 、 、 三 。
个方 向的位移 自由度和 U U 、 R 三个方 向的旋转 自由度 。 R 、R: , U
mut u c i n hg t u e pa f r lf n t ih — i d lt m i o alt o
L i-e gJA GWe,H N i u , A a — a I n fn , N iZ A G L- n G O N n n n Q I j ( c ol f ca ia E g er gJ n s nvr t o in e n eh o g , hni g2 0 , hn ) S ho o h ncl n i ei ,i guU i s y f ce c dT cn l y Z ej n 0 3 C ia Me n n a e i S a o a 1 2
重型特种专用车异型车架结构有限元分析及设计优化
重型特种专用车异型车架结构有限元分析及设计优化摘要:本文以某重型特种专用车为研究对象,在Pro/E软件中建立了该车辆的三维模型,并对其异型车架结构进行有限元分析及设计优化。
首先,对原始的车架结构进行靜力学及疲劳强度分析,得出其在极限载荷下的受力状态,并进行结构的初步优化。
接着,针对优化后的异型车架结构,设计了不同的加强方案,并通过有限元仿真的方法进行了详细的受力分析和优化。
最終,得出了该车辆在极限载荷条件下的安全系数,并对车架结构进行了更加科学合理的设计优化。
关键词:重型特种专用车;异型车架结构;有限元分析;设计优化;极限载荷1. 异型车架结构的靜力学分析通过有限元分析工具对该车辆原始的异型车架结构进行受力分析,得出其在静态负载下的应力分布情况,并确定了其在极限载荷条件下的最大应力点位置、大小以及受力方向。
结合实际运行环境及实际使用条件,对车辆的应力状态进行优化设计。
2. 异型车架结构的疲劳强度分析通过有限元分析工具对该车辆原始的异型车架结构进行受力分析,确定其在疲劳载荷下的应力分布情况,并分析车架结构的疲劳寿命及振动特性,引入疲劳强度系数,评估车辆在疲劳载荷下的耐久性。
3. 异型车架结构的优化设计针对初步优化设计结果,提出了不同的加强方案进行受力分析,并对其进行优化设计。
对加强方案进行仿真分析,并比较分析其在各个受力节点处的安全系数及结构整体的性能指标,根据优化结果选定最佳方案,得出车辆的优化设计方案。
4. 仿真分析结果通过有限元仿真分析,得出了车辆在静态负载及疲劳载荷下的应力分布和变形情况,得出车辆在极限载荷条件下的安全系数及响应曲线,为最终的设计方案提供了必要的数值参考。
结论:本文通过有限元分析工具对某重型特种专用车的异型车架结构进行了优化设计,得出了车辆在极限载荷条件下的安全系数,并实现了对车架结构布局的科学、合理的优化设计。
在实际的汽车制造及设计中具有一定的指导意义。
自从汽车的发明以来,人们对汽车功能更高、性能更好的需求日益增长。
基于ANSYS的高空作业车臂架有限元分析
基于ANSYS的高空作业车臂架有限元分析发表时间:2017-10-23T12:14:26.840Z 来源:《电力设备》2017年第17期作者:张幸幸[导读] 摘要:以高空作业车臂架为研究对象,以ANSYS分析软件为工具,对其强度和刚度进行有限元分析,形成基于ANSYS软件平台的高空作业车臂架计算分析方法,为高空作业车的臂架优化设计和改进提供了有力的支撑。
(徐州徐工环境技术有限公司江苏徐州 221135)摘要:以高空作业车臂架为研究对象,以ANSYS分析软件为工具,对其强度和刚度进行有限元分析,形成基于ANSYS软件平台的高空作业车臂架计算分析方法,为高空作业车的臂架优化设计和改进提供了有力的支撑。
关键词:高空作业车;臂架;有限元高空作业车主要由底盘、副车架、转台、臂架系统、控制系统、工作平台组成。
其中,臂架是高空作业车最主要的关键部件之一,其安全性、可靠性和先进性是决定高空作业车核心竞争力的关键。
臂架作为将工作平台送至指定工作位置的主要部件,其可靠性对作业安全性的影响至关重要,因此,对臂架结构进行优化及提高可靠性的研究和攻关具有重要意义。
本文以30m高空作业车臂架为研究对象,充分利用有限元多种单元类型的特点,对臂架实现了建模,得到了臂架静态计算的变形与应力,为臂架结构优化及其可靠性的提升奠定了理论与实践数据相统一的基础。
1 臂架所受载荷的确定对于静强度分析,传统观点认为,臂架水平全伸时的工况是最危险工况,但是对于某些部件,从经验可以判断最大应力发生在其他作业工况。
为了更好的了解臂架的整体应力分布情况,对其各个作业工况都进行有限元计算是非常必要的。
作用在臂架上的载荷分为基本载荷和附加载荷,基本载荷是始终或经常作用在高空作业车臂架结构上的载荷,包括自重载荷、工作载荷;附加载荷是高空作业车在正常工作状态下,结构件所受的非经常性作用的载荷,包括风载荷和冲击载荷。
对于不同的载荷,在计算过程中需要乘上不同的载荷系数。
gkz14高空作业车工作臂设计及有限元分析设计说明书_毕业论文
1 绪论1.1 概述我国高空作业机械的生产于20世纪70年代末开始起步,起步较晚但发展较快,目前生产经营企业已由原来的几家迅速增加到40余家,其中与国外合资或合作生产的企业有5家,根据2004年和2005年《中国工程机械年鉴》,2003年高空作业机械工业总产值为32139万元,生产各类高空作业平台1906台,高空作业车740台;2004年高空作业机械工业总产值为36340万元,生产各类高空作业平台2500台,高空作业车800台。
据不完全统计,到2008年,全国高空作业车年总产销量均超过1600台,可见发展速度之快,行业几个骨干企业通过近几年强化技术创新和科研开发,其生产规模不断扩大,形成了各自特色的产品系列,基本能满足国内市场高空作业机械的需要,企业的各项主要经济指标逐步上升,经济效益也逐年提高,行业也呈现出快速发展的态势。
1.1.1 高空作业机械行业的发展现状(1) 产品性能逐步提高我国高空作业机械行业的一些骨干企业利用自己的技术和设备优势,并通过引进、消化和再创新,开发了许多新产品,其产品的技术水平和产品质量都不断提高,达到和接近了国际同类产品的先进水平,推动了高空作业机械行业的技术进步,在国内市场中竞争力强,市场销路好,产量增加较快。
如杭州爱知工程车辆有限公司开发的全液压驱动型最大作业高度可达26.7m 的自行式高空作业平台,徐州海伦哲开发的全遥控16m自行走高空作业车、20m联动折叠加伸缩智能控制和35m多级伸缩折叠混合臂架智能控制高空作业车等,以上产品填补了国内产品空白,达到了国际先进水平,北京起重机厂开发了自行式剪叉平台、蜘蛛式折臂平台、箱型截面铝合金桅柱平台,其中箱型截面铝合金桅柱平台单桅柱最大作业高度达到了16.5m,杭州赛奇工程机械厂多桅柱铝合金平台达到了22m,。
此外,在高空作业车产品方面,徐州海伦哲、抚顺起重机、锦州重型、重庆大江等公司先后开发了30m以上的高空消防车,彻底打破了国内只能依赖进口产品的薄弱局面。
重型特种专用车平衡悬架建模及车架有限元分析
图1后三桥拟采用的平衡悬架¹支座º钢板弹簧»平衡臂1引言重型特种专用车由于自重和载荷均很大,因而其车架的承载能力和平衡悬架的性能对整车的性能及安全至关重要。
某自走式石油钻修井机后三桥平衡性不好,易造成个别轮胎过载,引起爆胎,厂家拟采用新的三桥平衡悬架替代之,而新的悬架形式与具体参数对悬架的平衡性能和整车的通过性均有较大的影响。
因此,必须结合车架和悬架的弹性变形进行综合分析;同时,还必须对整体车架和悬架主要部件的承载能力进行计算,保证整个系统具有足够的强度和刚度。
本文研究了三桥平衡悬架的有限元建模问题,并结合车架进行了有限元计算,分析了悬架的平衡性、整车的通过性,以及车架和悬架主要部件的强度,为厂家对其产品的设计改进提供参考,为研究平衡架的平衡、干涉及整车通过性等问题提供参考。
2有限元模型的建立2.1车架及悬架的结构特点自走式石油钻修井机共有6个车桥,自重达56t,车架采用边梁式结构,主要由左右两根纵梁及13根横梁焊接而成。
车架全长14000mm,纵梁间距890mm 。
两根纵梁为工字型截面,由钢板焊接而成。
横梁主要有角钢梁、矩形管梁和形状复杂的组焊梁,横梁与纵梁连接方式为焊接。
车头横梁和车尾横梁与纵梁形成闭合结构,以增加扭转刚度。
纵梁中部和车尾横梁上共装四个支撑油缸,在举升井架时起支撑作用。
靠近尾部的一根横梁上安装举升油缸,在支撑油缸支撑起整车后将井架从水平位置举升到垂直位置。
车架上安装的主要部件有驾驶室总成、发动机总成、变速箱总成、绞车架、主滚筒总成、捞砂滚筒总成及井架总成等。
原设计中前三桥通过推杆式平衡悬架与车架相连,第4和第5桥采用刚性平衡悬架,第6桥采用空气悬架。
在使用中,第6桥易过载,出现爆胎现象。
因此后三桥拟采用新的三桥平衡悬架,其结构如图1所示。
2.2车架有限元模型的建立修井机车架为典型的薄壁梁结构,一般可用梁单元或者板单元对其建模。
虽然采用梁单元能够计算出车架整体的应力水平和应力分布,具有计算规模小、计算速度快的优点,但对几何结构简化过多,计算精度较低,不能很好地反映纵横梁接头区域的应力分布,难以得到局部应力集中,而且还忽略了扭转时结构的翘曲变形。
基于ANSYS高空作业车吊臂结构的有限元分析
内容摘要城市化建设的飞速发展,城市的高层建筑群越来越多,对适合于此类建筑物施工的高空作业车设备需求量与日俱增。
作业臂是高空作业平台的重要承载部件之一,也是整机结构强度相对薄弱的部分,其力学性能对机械的正常运转有直接影响,为了保证工作人员高空作业时的人身安全,其作业臂有着严格的设计要求。
针对此问题,在对其结构进行详细分析的基础上,可以利用ANSYS软件与CAD软件的数据交换功能,将AutoCAD软件中建立的作业臂的三维几何模型导入ANSYS中, 选择solid92实体单元,利用ANSYS强大的网格划分功能,分析作业臂的结构和受载特点,建立有限元模型进行作业臂结构的强度和刚度分析,确定危险截面或危险点得应力分布及变形,找出结构设计中的不合理因素,对作业臂模型的截面尺寸形式进行了合理的优化设计,以达到节约材料,节省成本,并保证作业臂的安全系数。
关键词: 高空作业车作业臂有限元分析截面ANSYSAbstractWith the rapid development of urbanization, The urban architecture is to be more and more, which demand more and more the appropriate equipment for the construction of such buildings. Telescopic boom is one of an important bearing component in Aerial Work Platform, and also is relatively weak machine parts, whose mechanical properties has a direct impact on the normal operation of the machine. It is necessary and important to research the mechanical properties of the working arm in the design field of aerial working platform for ensuring the person safety in aerial working.In this situation, based on the detailed analysis of working arm structure, and then the 3D geometry model has been made in the platform of AutoCAD, the model was imported into the ANSYS. Making use of the solid element solid92 and powerful gridding partition ability of ANSYS and then using the function to analyze the structure of the working arm and the load characteristics of the operating arm. To establish the finite element model of the structure is to analyze strength and stiffness, which will determine the dangerous section or dangerous point and deformation to identify the unreasonable factors of the structural design. The overall performance will be improved. The plate thickness is optimized to reduce the material and the cost and to ensure the safety factor of the operating arm.Key words: Aerial working platform Working arm Finite analysis Section Ansys第1章绪论1.1课题的研究背景与意义工程机械广泛应用于经济建设的各部门,在整个经济发展中占有十分重要的地位。
装载机动臂的有限元分析及改进
应力 工况
插入工况 举升工况
பைடு நூலகம்
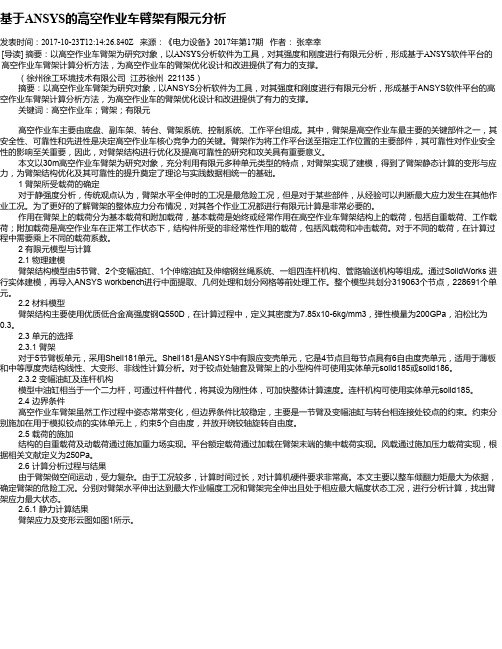
表 2 2种工况下动臂应力集中部位所受最大应力
单位: M Pa
X 方 向 最 Y 方 向 最 Z 方 向 最 X Y 方向 最 YZ 方 向 最 XZ 方向最 最 大 等 效
大应力
大应力
大应力
大剪应力 大剪应力 大剪应力 应力
550. 964 829. 091
246. 557 366. 37
图 4 最大 等 效 应 力部 位
动臂在 X 、Y、Z 方 向 上 的 合 位 移 的 最 大 值 为 9. 201mm。动 臂的 最大 等效 应力 为 374. 934M Pa。最 大等效应 力部 位处 于动 臂的 上铰 点处 。
( 2 ) 举升 工况 : 保 持转 斗缸 长 度不 变 , 操 作 举 升缸 , 将 动臂 升至 上限 位置, 准 备卸 载。 该工 况 下 的有 限元分 析如 图 5、6 所示 。
由图 5~ 6可 以看 出, 动 臂的 最 大 等效 应 力 为 5 65. 14 7MP a。 最大 等 效 应 力 部 位 也 处 于 动 臂 的 上铰 点处。
2种工 况下 动 臂 下 铰 点最 大 变 形 和 应 力 集 中 部位 所受最 大应 力情 况如 表 1~ 2所示 。