转动惯量的测量
大学物理实验实验刚体转动惯量的测量

测量转动周期
使用测量仪器记录 刚体转动的周期。
安装刚体
将刚体安装在支架 上,确保稳定和水 平。
施加扭矩
使用砝码或其他方 式施加扭矩,使刚 体转动。
重复测量
多次施加不同大小 的扭矩,并记录相 应的转动周期。
数据记录和处理
记录数据
将实验过程中测量的数据记录在实验报告中。
数据处理
根据测量数据,计算刚体的转动惯量。
学习测量刚体转动惯量的方法
扭摆法
通过测量刚体在摆动过程中周期的变化来计算转动惯量,利用单摆的周期公式 $T = 2pisqrt{frac{I}{mgh}}$,其中 $I$ 是刚体的转动惯量,$m$ 是刚体的质量,$g$ 是重力加速度,$h$ 是单摆的悬挂高度。
复摆法
通过测量复摆在摆动过程中周期的变化来计算转动惯量,利用复摆的周期公式 $T = 2pisqrt{frac{I}{mgh}}$,其中 $I$ 是刚体的转动惯量,$m$ 是刚体的质量,$g$ 是重力加速度,$h$ 是复摆的悬挂高度。
转动惯量在工程中的应用
在机械设计中,转动惯量的大小直接影响到机械系统的稳定性和动态响应;在航 天工程中,卫星的转动惯量对于其姿态控制和轨道稳定具有重要意义;在车辆工 程中,转动惯量的大小影响到车辆的操控性能和行驶稳定性。
02
实验原理
刚体转动惯量的定义和计算公式
转动惯量定义
描述刚体绕轴转动的惯性大小的物理量。
建议与展望
提出改进实验的建议和未来研究的方向,为 后续研究提供参考和借鉴。
05
实验注意事项
安全注意事项
实验前应检查实验装置是否稳 固,确保实验过程中不会发生 意外倾倒或摔落。
实验操作时应避免快速转动刚 体,以防因离心力过大导致实 验装置损坏或人员受伤。
转动惯量的测量

9.112
9.3487
—
T3
1.477
—
J3=
15.136
—
D
内
9.372
金
属
杆
1
3
3
.
0
9
L
61.12
T5
2.288
J5=KT4²/4π²-J夹具
41.176
J`5=1/12m¯L²=41.418
0.491%
61.10
2.290
41.253
—
L
61.11
—
T5
2.289
—
J5=
41.215
1.220
6.948
-
D2
9.998
-
T2
1.219
-
J2=
8.803
金
属
圆
筒
7
1
2
.
1
3
D外
9.996
T3
1.472
J3=KT3²
/4π²-Jo
14.473
J3`==1/8(¯D²外+¯D内)=
16.756
9.668%
10.010
10.054
1.482
15.212
—
D外
10.020
D内
9.656
1.478
5.979
实验值
J= KT²/
4π²
(10¯4kgm²)
44.604
75.130
136.243
204.507
304.863
理论值
J`=J`滑块+2mx²J5`+J夹具
(10¯4kgm²)
转动惯量的量测

转 动 惯 量 的 量 测一、复摆原理简介转动惯量是反映物体质量分布的一个特征参数,是描述物体动力特性的重要物理量。
对于均质规则物体,其对于点或轴的转动惯量可以用数学工具直接计算得到。
而对于非均质或非规则的物体,要计算其转动惯量就不那么简单了,一般应借助于实验的手段。
下面介绍一个利用复摆运动测量物体转动惯量,并确定其惯性主轴的实验。
1 复摆对转轴的转动惯量图1为一复摆的示意图,首先测定复摆(架子)对于转轴OO ’的转动惯量J o 。
设复摆架子重量为F w ,重心到转轴的距离为a (这两个参数的确定方法参见“重量与重心的量测”实验)。
复摆绕轴微幅摆动的运动微分方程为:图1 复摆示意图0=+ϕϕow J aF && OO’C图2 板与复摆示意图I运动周期为: aF J T w oπ2= 测量n 个运动周期,设时间为t 1,则复摆架子的转动惯量为: a F nt J w o 21)2(π= (1) 2 任意形状非均质板的转动惯量下面我们用此装置来量测任意形状非均质板的转动惯量。
首先,测定板的重量F p 和重心的位置c 。
然后把板铅直地置于复摆上,并用螺丝固定,放置时板的重心与架子的重心尽可能在同一铅直线上,这可通过水平仪来校正。
如图2所示,质心到转轴的距离为b ,过质心建立固定于板上的直角坐标系cxy 。
先测定板对过质心且垂直于板的轴的转动惯量J c 。
让摆作微幅运动,测得n 次振动的时间t 2,则整个系统对转轴的转动惯量为)()2(221b F a F nt J p w +=π (2) 由平行轴定理,得: 21b gF J J J p o c −−= (3)3 主惯性轴位置的测定现在来确定板在xy 平面内的主惯性轴的位置。
首先测定板对x 、y 轴的转动惯量J x ,J y 。
把板水平放置如图3示(重心与架子的重心尽可能在同一铅直线上),x 、y 轴先后平行于转轴,作n 次微幅振动,测得的时间分别为t 3和t 4。
转动惯量的测量

实验三 转动惯量的测量 实验目的:本实验要求学生学会用三线摆测定物体的转动惯量的方法,检验转动惯量的平行轴定理,掌握电子秒表的使用方法。
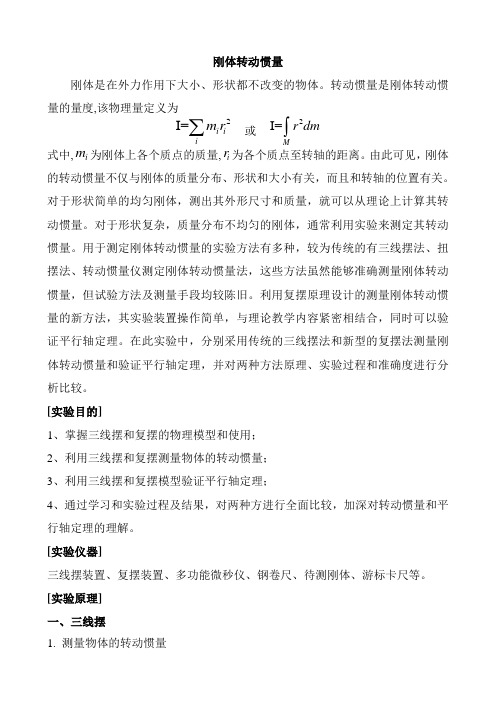
实验仪器:三线摆,米尺,水准气泡,电子秒表,转动惯量测试仪(型号:DH4601),游标卡尺(最小刻度:0.02mm 量程:0~300mm )实验原理:1. 刚体的转动定律当刚体绕固定轴转动时,刚体在外力矩M 的作用下,将获得角加速度β,β与合外力矩M 的大小成正比,并与转动惯量J 成反比,着一关系叫做刚体的转动定律,其数学表达式为:M = J β 2.转动惯量转动惯量J 等于刚体中每个质点的质量m i 与这一质点到轴距离的平方 r 2i 的乘积的总和。
转动惯量的定义式的积分形式为:∑=++=2222211i i r m r m r m JJ = ∫r 2d m3. 三线摆法原理三线摆是由上下两个圆盘用三条金属线连结而成,盘的系绳点构成等边三角形,上盘称小圆盘,可使小圆盘绕转轴转过一小角度,用以启动下盘固定轴线OO ’ 转动。
下盘称大圆盘,也叫做悬盘。
三条金属丝所受张力相同,长度相同。
相关公式: 02ωπ=T h J mgRr 020=ωmgRr h J T 02202244πωπ==22220164T h mgDd T h mgRr J ππ==21021016)(T h gDd m M J π+=010J J J -=实验步骤: 1. 调节三线摆,先调节三根摆线等长,再调大圆盘水平 2. 测量高度h ,用米尺测量5次,取平均值 3. 测大圆盘转动惯量J o 4. 测金属圆环的转动惯量J 15. 验证转动惯量的平行轴原理 实验数据处理:表一:三线摆参数表二:实验数据数据处理:222102101044)(T h mgRr T h gRr m m J J J ππ-+=-==1.78×10-3(kg 。
m )m U d 4104.5-⨯= m U D 5102.1-⨯=s U T 007.00=s U T 006.010= m U U m M 6101-⨯== 24104.1m kg U J ⋅⨯=-故结果表达式为:J = 1.78×10-3 ± 1.4 × 10-4 (kg ·m)分析与讨论:1. 实验过程中,一定要事先将光电门的位置调好,并尽量在静止情况下启动圆盘(或圆盘和圆环)。
转动惯量的测量
• 转动惯量简介 • 测量转动惯量的方法 • 转动惯量的测量结果分析 • 转动惯量测量的实际应用 • 实验思考与拓展
01
转动惯量简介
定义与物理意义
转动惯量是描述刚体绕轴转动惯 性的物理量,其大小取决于刚体
的质量分布和转轴的位置。
转动惯量在经典力学中具有重要 的意义,它决定了刚体旋转运动 的角动量、角速度、角加速度等
改进
通过实验标定获取准确参数,或 查找相关文献资料获取准确参数
。
问题3
转动惯量计算公式中的参数不易 获取。
改进
使用润滑剂减小转动轴的摩擦力 ,或采用无摩擦转动轴设计。
转动惯量测量的其他方法
落体法
通过测量落体时间来计算 转动惯量。
振动法
通过测量振动频率来计算 转动惯量。
飞轮法
通过测量飞轮的转动惯量 来推算其他物体的转动惯 量。
运动学量。
转动惯量在陀螺仪、电机控制、 航天器姿态控制等领域有广泛应
用。
转动惯量的计算公式
1
对于细长杆,其转动惯量为 $I = frac{1}{3}mr^{2}$,其中 $m$ 为质量,$r$ 为 质心到转轴的距离。
2
对于圆盘,其转动惯量为 $I = frac{1}{2}mr^{2}$,其中 $m$ 为质量,$r$ 为 半径。
结果分析
对测量结果进行分析,判断其是否符合预期结果,并分析产生误差的可能原因。
误差分析
对实验过程中可能产生的误差进行分析,如测量工具的精度、人为操作误差、 环境因素等,并提出相应的改进措施。
实验结论与注意事项
实验结论
根据实验结果和误差分析,得出实验结论,总结转动惯量测 量的方法和注意事项。
转动惯量的测定

转动惯量的测定一、实验目的:1、测定圆台的转动惯量。
2、测定圆盘的转动惯量。
3、验证平行轴定理。
二、实验原理:1.转动系统所受合外力矩合M 与角加速度β的关系根据刚体转动定律,刚体绕某一定轴转动得角加速度β与所受的合外力矩合M 成正比, 与刚体的定轴转动惯量I 成反比,即M I β=合 (16-1)其中I 为该系统对回转轴的转动惯量。
合外力矩M 合主要由引线的张力矩M 和轴承的摩擦力力矩M 阻构成,则M M I β-=阻摩擦力矩是未知的,但是它主要来源于接触磨擦,可 以认为是恒定的,因而将上式改为M I M β=+阻 (16-2)在此实验中要研究引线的张力矩M 与角加速度β之间是否满足式(16-2)的关系,即测量在不同力矩M 作用下的β值。
(1)关于引线张力矩M设引线的张力为T ,绕线轴半径为R ,则 M TR =又设滑轮半径为r ,质量为m ',其转动惯量为I ',塔轮转动时砝码下落的加速度为a ,参照图16-2可以得出mg T maa T r Tr I r '-=⎧⎪⎨''-=⎪⎩从上述二式中消去T ',同时取212I m r ''=,得出在此实验中保持0.3%2m a a g m'+≤,则mg T ≈,此时: mgR M ≈ (16-3)可见在实验中是由塔轮R 来改变M 的值。
(2)角加速度β的测量测出砝码从静止位置开始下落到地面上的时间为t ,路程为s ,则平均速度/υS t =,落到地板前瞬间的速度2υυ=,下落加速度/aυt =,角加速度R a /=β,即 22sR tβ=(16-4) 此方法一般是使用停表来测量砝码落地时间t ,由于t 较小,故测量误差比较大。
我们采用另外的方法:3131(6/2/)/(/2/2)t t t t βππ=+-三、实验内容:1.考察张力矩与角加速度的关系(1)用水准器将回转台调成水平,即调节轴铅直。
转动惯量的测量
0
着时间改变? 2. 三线摆在加上待测物后,摆动周期是否一定比空盘的周期大? 3. 在测量过程中如果下盘出现晃动对周期的测量有影响吗?如有影响,应该如 何避免? 4. 在复摆中,改变悬挂点时,摆动周期是否改变,为什么? 5. 将复摆法和三线摆法做比较,总结他们各自的优点及缺点。
T =2π I x +I 0 Mgh 0
(2-7)
式中, M=m0 +m x 将上式平方后,得:
IX = Mgh 0T 2 -I 0 4π 2
(2-8)
将待测物的质心调节到与复摆质心重合,测出周期为 T,带入上式,可求转动惯 量为 I X 和 I X0 。 2,验证平行轴定理 取质量和形状完全相同的两个摆锤 A 和 B,对称地固定在 复摆质心 G 的两边, 设 A 和 B 的位置距离复摆质心的距离为X, 如图 2 所示,由式(2-5)可得:
式中, I A0 和 I B0 分别为摆锤 A 和 B 绕质心的转动惯量,二式相加得:
I A +I B =I A0 +I B0 + m[(h 0 -x) 2 +(h 0 +x) 2 ]
2 = 2[(I A0 + m A (h 0 +x 2 )]
(2-12)
将 2-12 式带入 2-9 式得:
= T2 8π 2m A 2 8π 2 x + (I A0 + I 0 + m Ah02 ) Mgh0 Mgh0
2 m0 gh = (I 0 ω0 )/2
(1-1)
当下盘转动角度很小,悬线很长时扭摆的运动可近似看作简谐运动。角位移 θ , 角速度 ω 和时间 t 的关系可以表示为:
θ = θ0 sin
= ω 2π t T0
物体转动惯量的测量原理
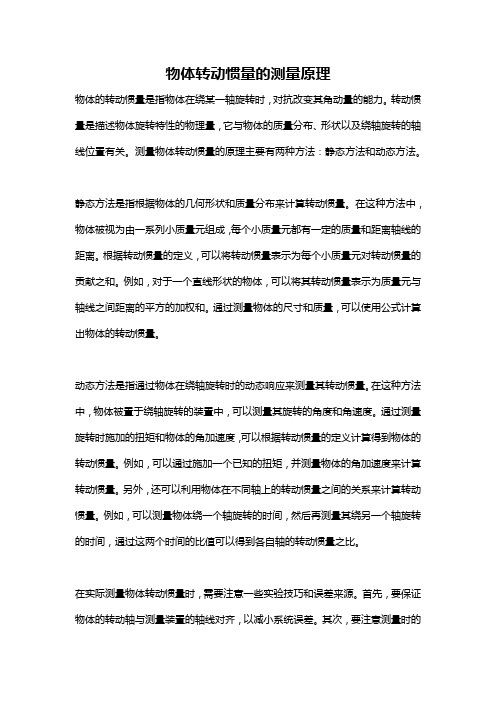
物体转动惯量的测量原理物体的转动惯量是指物体在绕某一轴旋转时,对抗改变其角动量的能力。
转动惯量是描述物体旋转特性的物理量,它与物体的质量分布、形状以及绕轴旋转的轴线位置有关。
测量物体转动惯量的原理主要有两种方法:静态方法和动态方法。
静态方法是指根据物体的几何形状和质量分布来计算转动惯量。
在这种方法中,物体被视为由一系列小质量元组成,每个小质量元都有一定的质量和距离轴线的距离。
根据转动惯量的定义,可以将转动惯量表示为每个小质量元对转动惯量的贡献之和。
例如,对于一个直线形状的物体,可以将其转动惯量表示为质量元与轴线之间距离的平方的加权和。
通过测量物体的尺寸和质量,可以使用公式计算出物体的转动惯量。
动态方法是指通过物体在绕轴旋转时的动态响应来测量其转动惯量。
在这种方法中,物体被置于绕轴旋转的装置中,可以测量其旋转的角度和角速度。
通过测量旋转时施加的扭矩和物体的角加速度,可以根据转动惯量的定义计算得到物体的转动惯量。
例如,可以通过施加一个已知的扭矩,并测量物体的角加速度来计算转动惯量。
另外,还可以利用物体在不同轴上的转动惯量之间的关系来计算转动惯量。
例如,可以测量物体绕一个轴旋转的时间,然后再测量其绕另一个轴旋转的时间,通过这两个时间的比值可以得到各自轴的转动惯量之比。
在实际测量物体转动惯量时,需要注意一些实验技巧和误差来源。
首先,要保证物体的转动轴与测量装置的轴线对齐,以减小系统误差。
其次,要注意测量时的摩擦和空气阻力对实验结果的影响,可以通过减小转动摩擦和采用真空环境来减小这些误差。
另外,还要注意测量时物体的质量分布是否均匀,如果质量分布不均匀,需要进行修正计算。
综上所述,物体转动惯量的测量可以通过静态方法和动态方法来实现。
静态方法通过计算物体的几何形状和质量分布来计算转动惯量。
而动态方法则通过测量物体在绕轴旋转时的动态响应来计算转动惯量。
在实际测量中,需要注意一些实验技巧和误差来源,以提高测量的准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
测定转动体系的转动惯量是生产实践中经常会遇到 的一个课题。
前言
转动惯量是描述刚体转动惯性大小的物理量,是 研究和描述刚体转动规律的一个重要物理量。
它不仅取决于刚体的总质量,而且与刚体的形状、质 量分布以及转轴位置有关。
对于质量分布均匀、具有规则几何形状的刚体,可以 通过数学方法计算出它绕给定转动轴的转动惯量。
对于质量分布不均匀、没有规则几何形状的刚体,用 数学方法计算其转动惯量是相当困难的,通常要用实 验的方法来测定其转动惯量。
实验目的
理解转动惯量的概念和平行轴定理的物理意义。 观察刚体的扭转摆动现象,了解和掌握测量刚体转动惯 量的原理和方法。 验证转动惯量的平行轴定理。
实验仪器
金属托盘
光电门
螺旋弹簧 底脚螺丝
为 T0,则
T
2 0
=
4p K
2
I
0
待测物圆柱对其质心轴的转动惯量理论值为 I1,测出其 与载物盘的复合体摆动周期为 T ,则
T2
=
4p 2 K (I 0 +
I 1)
其中
I1 =
1 8
m
1D
2 1
由前两式可得到
K
=
4p 2I 1
T2-
T
2 0
a
=
K 4p 2
=
T
2
I1
-
T
2 0
实验内容
计算各物体转动惯量的理论值
实验内容
测量金属圆筒、球体及金属细杆的转动惯量,计算出各 待测物的转动惯量的实验值,并与理论值比较,计算二 者的百分误差。
验证平行轴定理
将滑块对称地放置在细杆两边的凹槽内,此时滑块质心 离 转 轴 的 距 离 分 别 为 5.00,10.00,15.00,20.00,25.00 厘 米,分别测定细杆的摆动周期,计算滑块在不同位置时 的转动惯量(计算时应扣除支架的转动惯量),并与理论 值比较,计算百分误差。
注意事项
由于弹簧的扭转常数K值不是固定常数,它与摆动角度略 有关系,实验中摆角在90º左右为宜。
光电探头宜放置在挡光杆的平衡位置处,挡光杆不能和 它相接触,以免增大摩擦力矩。 机座应保持水平状态。 圆柱、圆筒放置时要放正不可斜放。 在安装待测物体时,其支架必须全部套入扭摆主轴,并 将止动螺丝旋紧,否则扭摆不能正常工作。
周期测定仪
支架底座
实验原理
物体装在一扭摆弹簧上,根据虎克定律,当物体在水平 面内转 - K q K 为弹簧的扭转系数
在此力矩作用下物体转动,由转动定律 M I 有
d 2
dt 2
M I
令 2 K I
得刚体扭摆运动的微分方程:
d 2
dt 2
根据各待测物转动惯量计算公式,测量各物体有关几何 尺寸及质量,各测量三次取平均值。
扭转常数K的确定
①调整扭摆基座底角螺丝,使水准仪中的气泡居中。
②装上金属载物盘,并调整光电探头的位置,使载物盘 上的挡光杆处于其缺口中央且能遮住发射、接收红外光 线的小孔,测定其摆动周期T0。 ③将塑料圆柱体垂直放在载物盘上,测定摆动周期T1。 ④由T0 、T1及塑料圆柱转动惯量的理论值I1计算扭摆的 扭转常数K。
2
实验原理
可知,扭摆运动具有简谐振动的特性,振动周期为:
T = 2p = 2p I
w
K
如果已知 K,则测得周期 T 就可以计算得转动惯量 I。
I = K T = aT 4p 2
令 K =a 4p 2
如何求出弹簧的扭转系数K ?
测定扭摆的扭转系数
设金属载物盘绕垂轴的转动惯量是 I0,测出其摆动周期