现代控制理论基础答案(黄辉先主编)
现代控制理论基础第三章习题答案
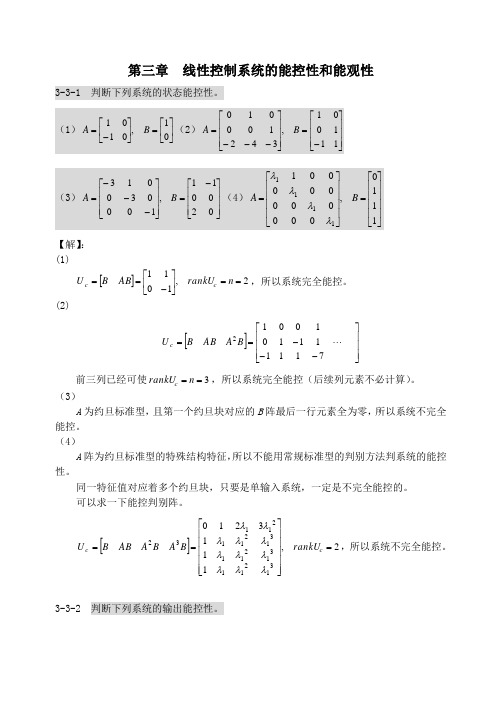
第三章 线性控制系统的能控性和能观性3-3-1 判断下列系统的状态能控性。
(1)⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-=01,0101B A (2)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=111001,342100010B A (3)⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A (4)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=1110,0000000011111B A λλλλ 【解】:(1)[]2,1011==⎥⎦⎤⎢⎣⎡-==n rankU AB BU c c ,所以系统完全能控。
(2)[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---==7111111010012B A ABBU c 前三列已经可使3==n rankU c ,所以系统完全能控(后续列元素不必计算)。
(3)A 为约旦标准型,且第一个约旦块对应的B 阵最后一行元素全为零,所以系统不完全能控。
(4)A 阵为约旦标准型的特殊结构特征,所以不能用常规标准型的判别方法判系统的能控性。
同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。
可以求一下能控判别阵。
[]2,111321031211312113121121132=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡==c c rankU B A BA AB BU λλλλλλλλλλλ,所以系统不完全能控。
3-3-2 判断下列系统的输出能控性。
(1) ⎪⎪⎪⎩⎪⎪⎪⎨⎧⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=xy u x x 011101020011100030013 (2) []⎪⎪⎩⎪⎪⎨⎧=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=x y u x x 0011006116100010【解】: (1)已知⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=020011,100030013B A ,⎥⎦⎤⎢⎣⎡-=011101C ,⎥⎦⎤⎢⎣⎡=0000D []⎥⎦⎤⎢⎣⎡--=111300002B CA CAB CB D前两列已经使[]22==m B CA CAB CB D rank ,所以系统输出能控。
现代控制理论基础chapter1答案(第一版黄辉先主编)

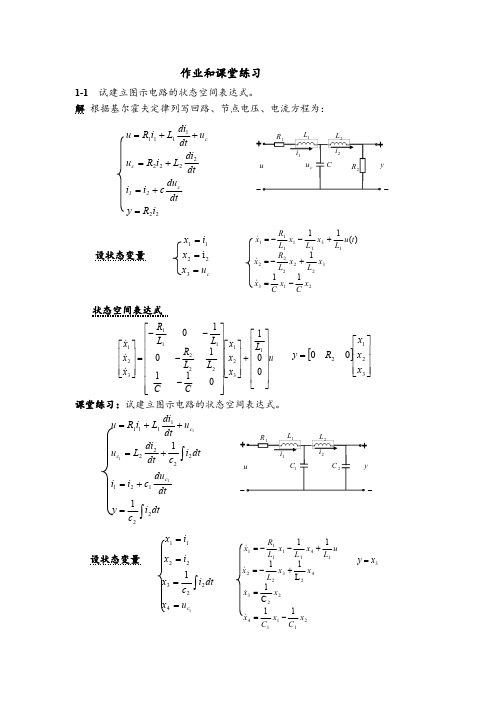
现代控制理论基础chapter1答案(第一版黄辉先主编): 1.1(a )解法一:根据基尔霍夫电压、电流定律,对最大回路和左网孔列写两个回路方程如下:()⎪⎩⎪⎨⎧-+=++=⎰⎰⎰Ri i dt i C u Ri dt i C dt i C u i i 211221111, 对上述两个方程两边求导可得:()⎪⎩⎪⎨⎧-+=++=R i ii C u i R i C i C u i i 211221111 ,定义状态变量2211, 2Ri u x R i u x i i -=-=, 则得到两个状态变量的一阶微分方程如下:⎪⎪⎩⎪⎪⎨⎧+--=⎪⎭⎫ ⎝⎛-+⎪⎭⎫ ⎝⎛-=+=+--=⎪⎭⎫ ⎝⎛-+⎪⎭⎫ ⎝⎛-=i i i i i i u RC x RC x RC R x u C R x u C i C i C x u RCx RC x RC R x u C R x u C x 31112111512122212121221211 输出方程i o u x Ri u y +-===22 写成矩阵形式的状态空间表达式为:iu RC RC x x RC RC RC RC x x ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎦⎤⎢⎣⎡3511122121i u x x y +⎥⎦⎤⎢⎣⎡-=21]1 0[状态变量图或模拟结构图略。
解法二:根据基尔霍夫电压、电流定律,对最大回路和左网孔列写两个回路方程及输出方程如下:()⎪⎪⎪⎩⎪⎪⎪⎨⎧=-+=++=⎰⎰⎰2211221111Ri u i i R dt i C u Ri dt i C dt i C u o i i ,定义状态变量 1 , 12211⎰⎰==dt i C x dt i C x ,则可得到()⎪⎩⎪⎨⎧==-+=++=2211221x RC u y x xCR x u x RC x x u o i i ,求出基于状态变量和输入量表达的状态变量一阶微分方程和输出方程为:⎪⎪⎪⎩⎪⎪⎪⎨⎧+--=+--=+--=i i i u x x y u RC x RC x RC x u RCx RC x RC x 21212211111212 ,写成矩阵形式的状态空间表达式为: []iiu x x y uRC RC x x RC RCRC RC x x +⎥⎦⎤⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎦⎤⎢⎣⎡21212111351112 解法三:根据基尔霍夫电压、电流定律,对最大回路和左网孔列写两个回路方程如下:()⎪⎩⎪⎨⎧-+=++=⎰⎰⎰211221111i i R dt i C u Ri dt i C dt i C u i i , 对上述两个方程两边求导可得:()⎪⎩⎪⎨⎧-+=++=211221111i iR i C u i R i C i C u i i ,定义状态变量()22211, Ri u x i i R u x i i -=--=, 则得到两个状态变量的一阶微分方程如下:⎪⎪⎩⎪⎪⎨⎧+--=⎪⎭⎫ ⎝⎛+-+⎪⎭⎫ ⎝⎛+--=+=+--=⎪⎭⎫ ⎝⎛+--==i i i i i u RC x RC x RC R u x C R u x x C i C i C x u RC x RC x RC R u x x C i C x 3211211121121121221212212111 输出方程i o u x Ri u y +-===22 写成矩阵形式的状态空间表达式为:iu RC RC x x RC RC RC RC x x⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=⎥⎦⎤⎢⎣⎡3221112121i u x x y +⎥⎦⎤⎢⎣⎡-=21]1 0[1.1(b )(解法一)根据基尔霍夫电压、电流定律,列写回路方程和输出方程如下:⎪⎩⎪⎨⎧===++⎰idtC u y u u dt di L Ri o i o 1,选取状态变量⎰===idt C u i x o 1 x , 21, 则可得到状态方程和输出方程为:⎪⎪⎪⎩⎪⎪⎪⎨⎧==+--=212211111x y x C xu Lx L x L R x i 写成矩阵形式为:[]⎥⎦⎤⎢⎣⎡=⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎦⎤⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=⎥⎦⎤⎢⎣⎡2121211001011x x y u L x x C LL R x x i(解法二)根据基尔霍夫电压、电流定律,列写回路方程和输出方程如下:⎪⎩⎪⎨⎧===++⎰⎰idtC u y u idt C dt di L Ri o i 11,对第一个方程求导并两边同除以L 可得: i u Li LC i L R i 11=++ 选取状态变量i i i u u iu i x 10201- x , -βββ-== , 由系数 ;0 , 1, 0;1 ,21021=====b Lb b LC a L R a 可计算出 ⎪⎪⎪⎩⎪⎪⎪⎨⎧-=-=--==-===21102220111001010L R L L R a a b L a b b ββββββ ()()21102011Lx Rx u u u x L u x R i L Ri u idt Cu y i i i i i o --=+++-+-=--===⎰βββ 其状态空间表达式为:[]⎥⎦⎤⎢⎣⎡--=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-+⎥⎦⎤⎢⎣⎡⎥⎥⎦⎤⎢⎢⎣⎡--=⎥⎦⎤⎢⎣⎡21221211110x x L R y u L R L x x L R LCx x i 状态变量图或模拟结构图略。
现代控制理论基础习题解答
+ +
y
1
1
x3
s
3
1-4 已知系统的传递函数,试列写出状态空间表达式,并画出状态变量图。 (1)解
a 3 1, a 2 0,
G (s)
a 1 0,
s 2 2s 3 s3 1
b 0 0,
+
b1 1,
b 2 2,
b3 3
状态变量图为
1
U ( s) E ( s) 1
y 1 0 0x
状态变量图:
u
3
_
3 1 x3 1 x 2 1 x1 y x s s s5
5
+
3
作业和课堂练习
课堂练习: 已知系统的传递函数, 试列写出状态空间表达式, 并画出状态变量图。
G (s)
3s 4 s(s 1)(s 3)
s1 0 , s 2 -1, s 3 -3
y 1 0 0x
状态变量图:
u
2
3 1 x3 x _ s5
5
+
+
2 s x
1
x 2 1 x1 y
s
3
方法二: 状态空间表达式:
0 0 x a 3 1 0 -a2 0 0 1 x 0 u a1 1
u _
L2
i2
C22
x1 i1
R1 1 1 x1 x4 u L1 L`1 L1 1 1 2 x x3 x4 L2 L2 1 3 x x2 C2 1 x 4 x 1 1 x1 x2 C1 C1
设状态变量
x 2 i2 x3 1 i2 dt c2
现代控制理论课后题及答案
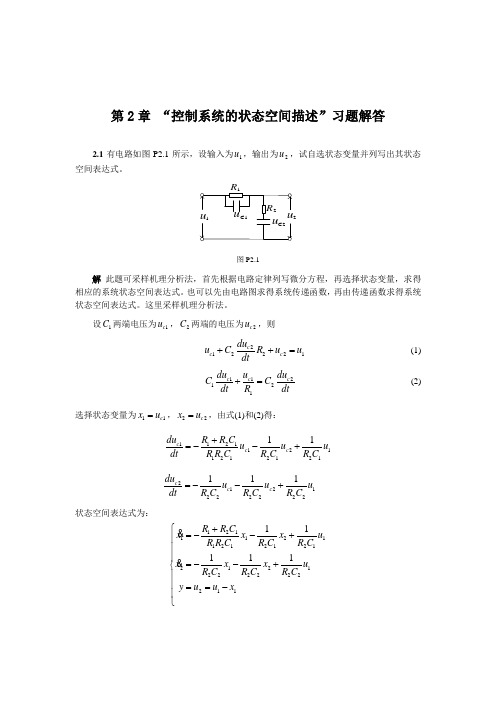
第2章 “控制系统的状态空间描述”习题解答2.1有电路如图P2.1所示,设输入为1u ,输出为2u ,试自选状态变量并列写出其状态空间表达式。
图P2.1解 此题可采样机理分析法,首先根据电路定律列写微分方程,再选择状态变量,求得相应的系统状态空间表达式。
也可以先由电路图求得系统传递函数,再由传递函数求得系统状态空间表达式。
这里采样机理分析法。
设1C 两端电压为1c u ,2C 两端的电压为2c u ,则212221c c c du u C R u u dt++= (1) 112121c c c du u duC C dt R dt+= (2) 选择状态变量为11c x u =,22c x u =,由式(1)和(2)得:1121121121212111c c c du R R C u u u dt R R C R C R C +=--+ 2121222222111c c c du u u u dt R C R C R C =--+ 状态空间表达式为:12111211212121212122222221111111R R C x x x u R R C R C R C x x x u R C R C R C y u u x +⎧=--+⎪⎪⎪=--+⎨⎪⎪==-⎪⎩即: 12121121211112222222211111R R C R C R R C R C x x u x x R C R C R C +⎡⎤⎡⎤-⎢⎥⎢⎥⎡⎤⎡⎤⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦--⎢⎥⎢⎥⎣⎦⎣⎦[]11210x y u x ⎡⎤=-+⎢⎥⎣⎦2.2 建立图P22所示系统的状态空间表达式。
1图P2.2解 这是一个物理系统,采用机理分析法求状态空间表达式会更为方便。
令()f t 为输入量,即u f =,1M ,2M 的位移量1y ,2y 为输出量, 选择状态变量1x =1y ,2x = 2y ,3x =1dy dt,24dyx dt =。
《现代控制理论》课后习题答案1.pdf

《现代控制理论》第一章习题解答1.1 线性定常系统和线性时变系统的区别何在? 答:线性系统的状态空间模型为:xAx Bu y Cx Du=+=+线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和中的各分量均为常数,而对线性时变系统,其系数矩阵D A ,B ,C 和中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的一类系统,而线性时变系统的参数则随时间的变化而变化。
D 1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别? 答: 传递函数模型与状态空间模型的主要区别如下:传递函数模型(经典控制理论)状态空间模型(现代控制理论) 仅适用于线性定常系统 适用于线性、非线性和时变系统用于系统的外部描述 用于系统的内部描述基于频域分析基于时域分析1.3 线性系统的状态空间模型有哪几种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对角线标准型。
对于阶传递函数n 1212101110()n n n n n n n b s b s b s b G s d s a s a s a −−−−−−++++=+++++"",分别有[]012101210100000100000101n n n xx ua a a a yb b b b x du−−−⎧⎡⎤⎪⎢⎥⎪⎢⎥⎪⎢⎥=+⎪⎢⎥⎨⎢⎥⎪⎢⎥⎪−−−−⎣⎦⎪=+⎪⎩"" ###%##"""⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⑴ 能控标准型:[]0011221100010********001n n n b a b a xa x ub a b y xdu −−−⎧−⎡⎤⎡⎤⎪⎢⎥⎢⎥−⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=−+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎢⎥⎢⎥⎪−⎣⎦⎣⎦⎪=+⎪⎩"" "######""⑵ 能观标准型:[]1212001001001n n p p x x up y c c c x du⎧⎡⎤⎡⎤⎪⎢⎥⎢⎥⎪⎢⎥⎢⎥=+⎪⎢⎥⎢⎥⎨⎢⎥⎢⎥⎪⎣⎦⎣⎦⎪⎪=+⎩"" ##%##""⑶ 对角线标准型: 式中的和可由下式给出,12,,,n p p p "12,,,n c c c "12121012111012()n n n n n n n n nb s b s b s bc c c G sd d s a s a s a s p s p s p −−−−−−++++=+=++++++−−−"""++能控标准型的特点:状态矩阵的最后一行由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分子多项式系数,输入矩阵中的元素除了最后一个元素是1外,其余全为0。
现代控制理论第二章答案
et
2e 2t
4e2t 2et
4e2t
et
0 1
2 3
(4)
(t)(t)
1
2
(et
e3t
)
(et e3t )
141((eet tee33t t))
1 (et 2 (et
e3t ) e3t )
2
141((eet tee33t t)) I
2
(t)
d dt
1 2
(t)
et
e2t
2e2t 2et
2e2t
et
(4)
(t )
1
2
(et
e3t
)
(et e3t )
141((eet tee33t t))
2
【解】 主要验证矢量不变性:
(t)(t) I
和组合性质: (t2 t1)(t1 ) (t2 )
(1)
1
(t)(t) 0
0
0 sin t cost
8
8
(
z
1 8
3)(z
5)
8
8
(
z
z1 2
3)(z
5)
8
8
x(z) (zI G) 1 zx(0) Hu(z)
(
z
z1 2
3)(z
5)
8
8
1 8
(
z
3)(z
5)
8
8
( (
z z
1 8
3)(z 8 z1
2 3)(z
5 8
5
) )
z
1
3
1 0
8
8
zT
(et
(et
现代控制理论基础(习题)
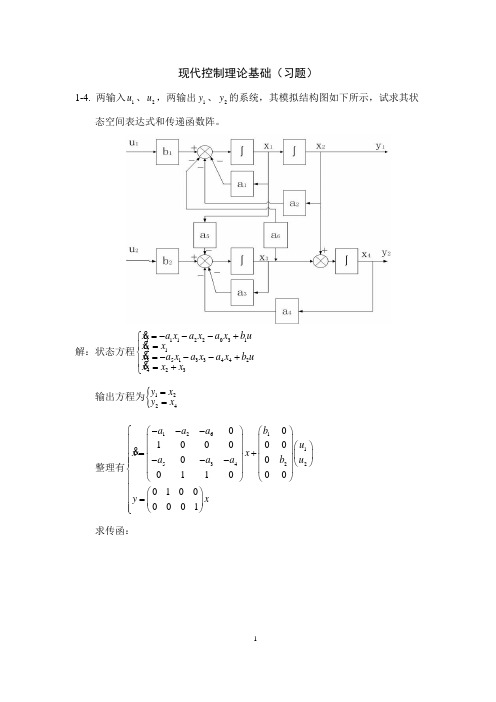
现代控制理论基础(习题)1-4. 两输入1u 、2u ,两输出1y 、2y 的系统,其模拟结构图如下所示,试求其状态空间表达式和传递函数阵。
解:状态方程111220312135133442423x a x a x a x b u x x x a x a x a x b u xx x =---+⎧⎪=⎨=---+⎪=+⎩输出方程为{1224y xy x ==整理有1261125342001000000001100001000001a a a b u x x u a a a b y x ⎧---⎛⎫⎛⎫⎪⎪ ⎪⎛⎫⎪ ⎪ ⎪=+ ⎪⎪ ⎪ ⎪---⎪⎝⎭⎪ ⎪⎨⎝⎭⎝⎭⎪⎪⎛⎫⎪= ⎪⎪⎝⎭⎩求传函:1121126153420010000()()00010000001001000000010001100b G s sI A b s a a a b s a s a a b s --⎛⎫ ⎪⎛⎫ ⎪=-⎪ ⎪⎝⎭ ⎪⎝⎭+⎛⎫⎛⎫ ⎪ ⎪-⎛⎫ ⎪ ⎪=⎪⎪ ⎪+⎝⎭⎪ ⎪--⎝⎭⎝⎭125342616122234534213415622346242260100det()det 001100(1)(1)det 0(1)det 1101()()()()s a a a s sI A a s a a s a a s a a s a a s a s a a s s a s s a a a a a s s a s a a s a s a a sa s a +++⎛⎫ ⎪- ⎪-= ⎪+ ⎪--⎝⎭+⎛⎫⎛⎫ ⎪ ⎪=-⋅-⋅++-⋅⋅+ ⎪ ⎪⎪ ⎪---⎝⎭⎝⎭=+-++++++-=+432222346241313441564221313562414232446()()()()a s a a a a s a a s a a s a s a a s a a s s a a s a a a a a a s a a a a s a a a a -+++++++-=+++-+++++-121223141243()b a b a G s b a b a ⎛⎫= ⎪⎝⎭322134a s a s a s =++ 4153(1)a a s a=-+ 236a a s =- 243126a s a s a a =++- 213141622511321222621()det()(1)b s a b s a b a b s G s sI A a b s b a b s a b s a b a b ⎛⎫++-= ⎪--+++-⎝⎭1-5. 系统的动态特性由下列微分方程描述(1)5732y y y y u u +++=+(2)57332y y y y u u u +++=++列写其相应的状态空间表达式,并画出相应的模拟结构图。
现代控制理论习题解答
现代控制理论习题解答《现代控制理论》第1章习题解答1.1 线性定常系统和线性时变系统的区别何在?答:线性系统的状态空间模型为:xAx Bu y Cx Du=+=+&线性定常系统和线性时变系统的区别在于:对于线性定常系统,上述状态空间模型中的系数矩阵A ,B ,C 和D 中的各分量均为常数,⽽对线性时变系统,其系数矩阵A ,B ,C 和D 中有时变的元素。
线性定常系统在物理上代表结构和参数都不随时间变化的⼀类系统,⽽线性时变系统的参数则随时间的变化⽽变化。
1.2 现代控制理论中的状态空间模型与经典控制理论中的传递函数有什么区别?答: 传递函数模型与状态空间模型的主要区别如下:1.3 线性系统的状态空间模型有哪⼏种标准形式?它们分别具有什么特点?答: 线性系统的状态空间模型标准形式有能控标准型、能观标准型和对⾓线标准型。
对于n 阶传递函数1212101110()n n n n n n n b s b s b s b G s d s a s a s a ------++++=+++++L L ,分别有⑴能控标准型: []012101210100000100000101n n n xx u a a a a y b b b b x du---=+??----????=+LL &M M M O M M L LL⑵能观标准型: []001122110001000100010001n n n b a b a xa x ub a b y xdu ---?--=-+?????-????=+??L L &%%L M M M M M M L %L ⑶对⾓线标准型: []1212001001001n n p p x x u p y c c c x du=+??????=+?L L &M M O M M L L 式中的12,,,n p p p L 和12,,,n c c c L 可由下式给出,12121012111012()n n n n n n n n nb s b s b s bc c c G sd d s a s a s a s p s p s p ------++++=+=++++++++---L L L 能控标准型的特点:状态矩阵的最后⼀⾏由传递函数的分母多项式系数确定,其余部分具有特定结构,输出矩阵依赖于分⼦多项式系数,输⼊矩阵中的元素除了最后⼀个元素是1外,其余全为0。