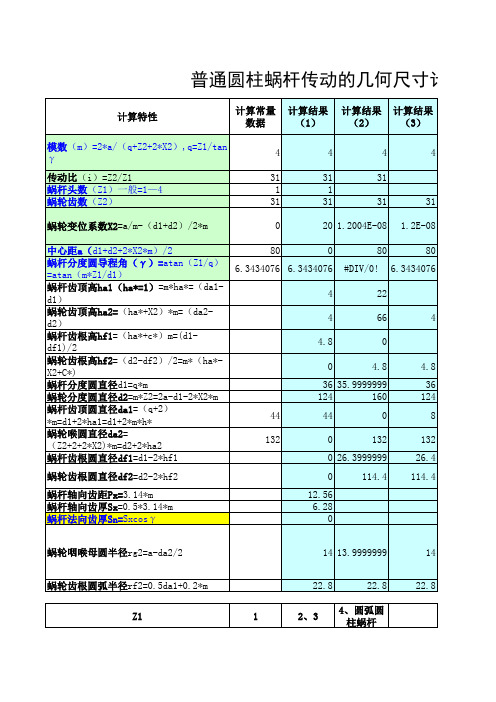
蜗轮蜗杆几何计算
蜗轮蜗杆计算公式(简洁版)
0
20 1.2004E-08 1.2E-08
中心距a(d1+d2+2*X2*m)/2 蜗杆分度圆导程角(γ)=atan(Z1/q) =atan(m*Z1/d1) 蜗杆齿顶高ha1(ha*=1)=m*ha*=(da1d1) 蜗轮齿顶高ha2=(ha*+X2)*m=(da2d2) 蜗杆齿根高hf1=(ha*+c*)m=(d1df1)/2 蜗轮齿根高hf2=(d2-df2)/2=m*(ha*X2+C*) 蜗杆分度圆直径d1=q*m 蜗轮分度圆直径d2=m*Z2=2a-d1-2*X2*m 蜗杆齿顶圆直径da1=(q+2) *m=d1+2*ha1=d1+2*m*h* 蜗轮喉圆直径da2= (Z2+2+2*X2)*m=d2+2*ha2 蜗杆齿根圆直径df1=d1-2*hf1
Z1大、 29.48
Z1小
Z1大、
33 29.48
普通圆柱螺杆L≥ X -1 -0.5 0 0.5 1
Z1=1~2 46
39.44 51.44 56.4 60.4
蜗杆螺纹部分长度L
圆弧圆柱蜗杆
Z1=3~4
X2
Z1
46
<1
1~2
49.16
1~1.5
1~2
61.16
<1
3~4
62.4
1~1.5
3~4
64.4
80
0
80
80
6.3434076 6.3434076 #DIV/0! 6.3434076
4
22
4
66
4
4.8
0
0
4.8
4.8
36 35.9999999
普通圆柱蜗杆传动基本几何尺寸计算关系式
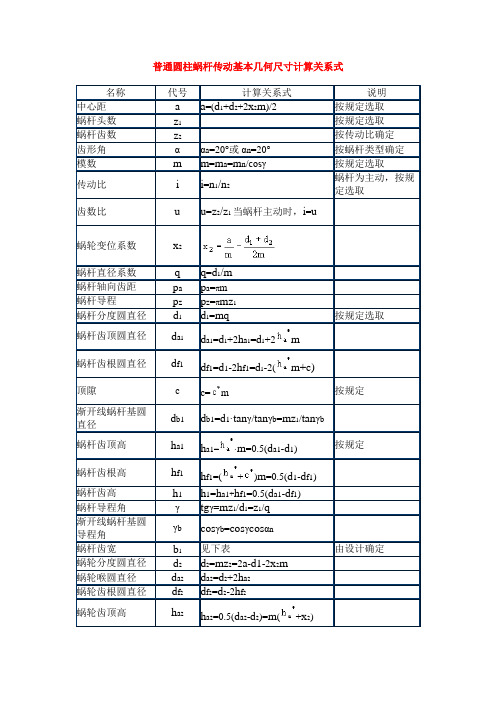
名称
代号
计算关系式
说明
中心距
a
a=(d1+d2+2x2m)/2
按规定选取
蜗杆头数
z1
按规定选取
蜗杆齿数
z2
按传动比确定
齿形角
α
αa=20°或αn=20°
按蜗杆类型确定
模数
m
m=ma=mn/cosγ
按规定选取
传动比
i
i=n1/n2
蜗杆为主动,按规定选取
齿数比
u
u=z2/z1当蜗杆主动时,i=u
经磨削的蜗杆,按左式所求的长度应再增加下列值:
当m<10mm时,增加25mm;
当m=10~16mm时,增加35~40mm;
当m>16mm时,增加50mm;
2
≤da2+1.5m
4
≤0.67da1
≤da2+m
0
-0.5
-1.0
0.5
1.0
≥(12.5+0.09z2)m
≥(9.5+0.09z2)m
≥(10.5+z1)m
蜗轮咽喉母圆半径
rg2
rg2=a-0.5da2
蜗轮齿宽
b2
由设计确定
蜗轮齿宽角
θ
θ=2arcsin(b2/d1)
蜗杆轴向齿厚
sa
sa=0.5πm
蜗杆法向齿厚
sn
sn=sa·cosγ
蜗轮齿厚
st
按蜗杆节圆处轴向齿槽宽ea'确定
蜗杆节圆直径
d1'
d1'=d1+2x2m=m(q+2x2)
蜗轮蜗杆设计
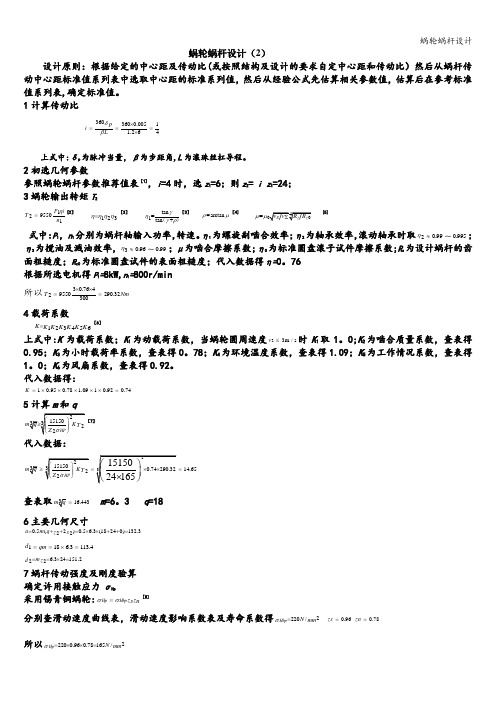
蜗轮蜗杆设计(2)设计原则:根据给定的中心距及传动比(或按照结构及设计的要求自定中心距和传动比)然后从蜗杆传动中心距标准值系列表中选取中心距的标准系列值,然后从经验公式先估算相关参数值,估算后在参考标准值系列表,确定标准值。
1计算传动比上式中:δp 为脉冲当量,β为步距角,L 为滚珠丝杠导程。
2初选几何参数参照蜗轮蜗杆参数推荐值表[1],i =4时,选z 1=6;则z 2= i z 1=24; 3蜗轮输出转矩T 21955021i P T n η=[2]123ηηηη=[3] tan =1tan +γηγρ()[3] =arctan ρμ[4]=μμ[5]式中:P 1, n 1分别为蜗杆轴输入功率,转速。
η1为螺旋副啮合效率;η2为轴承效率,滚动轴承时取0.990.9952η≈;η3为搅油及溅油效率,0.960.993η≈;μ为啮合摩擦系数;η0为标准圆盘滚子试件摩擦系数;R z 为设计蜗杆的齿面粗糙度;R z0为标准圆盘试件的表面粗糙度;代入数据得η=0。
76 根据所选电机得P 1=8kW,n 1=800r/min所以30.7649550290.322300T Nm ⨯⨯==4载荷系数123456K K K K K K K =[6]上式中:K 为载荷系数;K 1为动载荷系数,当蜗轮圆周速度23m /s v ≤时K 1取1。
0;K 2为啮合质量系数,查表得0.95;K 3为小时载荷率系数,查表得0。
78;K 4为环境温度系数,查表得1.09;K 5为工作情况系数,查表得1。
0;K 6为风扇系数,查表得0.92。
代入数据得:10.950.78 1.0910.920.74K =⨯⨯⨯⨯⨯=5计算m 和q7]代入数据:14.65≥==查表取16.443= m =6。
3 q =186主要几何尺寸18 6.3113.41d qm ==⨯= 6.324151.222m d z ==⨯=7蜗杆传动强度及刚度验算 确定许用接触应力σHp采用锡青铜蜗轮:Hp Hbp z z s n σσ=[8]分别查滑动速度曲线表,滑动速度影响系数表及寿命系数得2220/Hbp N mm σ= 0.96z s =0.78z n =所以22200.960.78165/Hp N mm σ=⨯⨯=3603600.00511.264p i L δβ⨯===⨯0.5(2)0.5 6.3(18240)132.322a m q x z =++=⨯⨯++=确定许用接触应力σHH σ=9]代入数据得:2134.57/H mm N σ=== 可见134.57165HHP σσ=<=,所以接触强度足够。
蜗轮蜗杆的计算

蜗轮蜗杆的计算公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]蜗轮、蜗杆的计算公式:1,传动比=蜗轮齿数÷蜗杆头数2,中心距=(蜗轮节径+蜗杆节径)÷2 3,蜗轮吼径=(齿数+2)×模数 4,蜗轮节径=模数×齿数5,蜗杆节径=蜗杆外径-2×模数 6,蜗杆导程=π×模数×头数7,螺旋角(导程角)tg β=(模数×头数)÷蜗杆节径 一.基本参数:(1)模数m 和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即 m a1=m t2=m αa1=αt2蜗杆轴向压力角与法向压力角的关系为: tgαa =tgαn /cosγ 式中:γ-导程角。
(2)蜗杆的分度圆直径d 1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q ,即: q=d1/m常用的标准模数m 和蜗杆分度圆直径d1及直径系数q ,见匹配表。
(3)蜗杆头数z 1和蜗轮齿数z 2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐 z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显着减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
蜗轮蜗杆的计算
蜗轮、蜗杆的计算公式: 1,传动比=蜗轮齿数÷蜗杆头数 2,中心距=(蜗轮节径+蜗杆节径)÷2 3,蜗轮吼径=(齿数+2)×模数 4,蜗轮节径=模数×齿数 5,蜗杆节径=蜗杆外径-2×模数 6,蜗杆导程=π×模数×头数7,螺旋角(导程角)tg β=(模数×头数)÷蜗杆节径 一.基本参数:(1)模数m 和压力角α:在中间平面中,为保证蜗杆蜗轮传动的正确啮合,蜗杆的轴向模数m a1和压力角αa1应分别相等于蜗轮的法面模数m t2和压力角αt2,即 m a1=m t2=m αa1=αt2蜗杆轴向压力角与法向压力角的关系为: tgαa =tgαn /cosγ 式中:γ-导程角。
(2)蜗杆的分度圆直径d 1和直径系数q为了保证蜗杆与蜗轮的正确啮合,要用与蜗杆尺寸相同的蜗杆滚刀来加工蜗轮。
由于相同的模数,可以有许多不同的蜗杆直径,这样就造成要配备很多的蜗轮滚刀,以适应不同的蜗杆直径。
显然,这样很不经济。
为了减少蜗轮滚刀的个数和便于滚刀的标准化,就对每一标准的模数规定了一定数量的蜗杆分度圆直径d1,而把及分度圆直径和模数的比称为蜗杆直径系数q,即:q=d1/m常用的标准模数m和蜗杆分度圆直径d1及直径系数q,见匹配表。
(3)蜗杆头数z1和蜗轮齿数z2蜗杆头数可根据要求的传动比和效率来选择,一般取z1=1-10,推荐 z1=1,2,4,6。
选择的原则是:当要求传动比较大,或要求传递大的转矩时,则z1取小值;要求传动自锁时取z1=1;要求具有高的传动效率,或高速传动时,则z1取较大值。
蜗轮齿数的多少,影响运转的平稳性,并受到两个限制:最少齿数应避免发生根切与干涉,理论上应使z2min≥17,但z2<26时,啮合区显着减小,影响平稳性,而在z2≥30时,则可始终保持有两对齿以上啮合,因之通常规定z2>28。
另一方面z2也不能过多,当z2>80时(对于动力传动),蜗轮直径将增大过多,在结构上相应就须增大蜗杆两支承点间的跨距,影响蜗杆轴的刚度和啮合精度;对一定直径的蜗轮,如z2取得过多,模数m 就减小甚多,将影响轮齿的弯曲强度;故对于动力传动,常用的范围为z2≈28-70。
蜗轮蜗杆计算
蜗轮蜗杆计算蜗杆传动当两根轴在90度相交,但它们既不平行也不相交时,采用蜗轮传动。
在蜗轮传动中,蜗杆是主动部件,蜗轮是被动部件。
蜗轮传动具有以下特点:1)结构紧凑,可获得较大的传动比,一般传动比为7-80。
2)运行稳定,无噪声3)传输功率范围大4)自锁5)传动效率低,蜗轮蜗杆往往由有色金属制成。
蜗杆的螺杆可分为单头螺杆和多头螺杆。
传动比计算公式如下:I = N1 / N2 = Z / KN1为蜗杆转速,N2为蜗轮转速,K为蜗杆头数,Z为蜗轮齿数蜗轮蜗杆机构1、目的:蜗轮蜗杆机构通常用于在两根交错轴之间传递运动和动力。
蜗轮和蜗杆相当于中间平面上的齿轮和齿条,蜗杆和螺杆的形状相似。
\ 二、基本参数:模数m、压力角、蜗杆直径系数q、导程角、蜗杆头数、蜗轮齿数、齿顶高系数(取1)及顶隙系数(取0.2)。
其中,模数m和压力角是指蜗杆轴面的模数和压力角,亦即蜗轮轴面的模数和压力角,且均为标准值;蜗杆直径系数q为蜗杆分度圆直径与其模数m的比值,三、蜗轮蜗杆正确啮合的条件1 中间平面内蜗杆与蜗轮的模数和压力角分别相等,即蜗轮的端面模数等於蜗杆的轴面模数且为标准值;蜗轮的端面压力角应等於蜗杆的轴面压力角且为标准值,即m2 当蜗轮蜗杆的交错角为时,还需保证,而且蜗轮与蜗杆螺旋线旋向必须相同。
四、几何尺寸计算与圆柱齿轮基本相同,需注意的几个问题是:蜗杆导程角()是蜗杆分度圆柱上螺旋线的切线与蜗杆端面之间的夹角,与螺杆螺旋角的关系为,蜗轮的螺旋角,大则传动效率高,当小於啮合齿间当量摩擦角时,机构自锁。
引入蜗杆直径系数q是为了限制蜗轮滚刀的数目,使蜗杆分度圆直径进行了标准化m一定时,q大则大,蜗杆轴的刚度及强度相应增大;一定时,q小则导程角增大,传动效率相应提高。
蜗杆头数推荐值为1、2、4、6,当取小值时,其传动比大,且具有自锁性;当取大值时,传动效率高。
与圆柱齿轮传动不同,蜗杆蜗轮机构传动比不等於,而是,蜗杆蜗轮机构的中心距不等於,而是。
蜗轮蜗杆几何计算
3.180 3.180 20° 20.853 1.000 5.000 5.000 6.000 6.000 10.000 90.000
蜗轮分度圆直径 蜗杆节圆直径 蜗轮节圆直径 蜗杆齿顶圆直径 蜗轮齿顶圆直径
d2 d1′ d2′ da1 da2
d2=mz2=2a-d1-2x2m d1′=(q+2x2)m=d1+2x2m d2′=d2 da1=(q+2)m;da1=d1+2ha1=d1+2ham da2=(z2+2+2x2)m =d2+2*ha2 蜗轮喉径
da2max da2max=da2+2m
da2max=测量值: 新件、原件195
蜗轮缘宽度
b
b=(0.67~0.75)da1,z1大时取小值
75.000
b=测量值:新件、 原件65.7 rg2=测量值: 新件20 (原件40) 计算 备注
蜗轮咽喉母圆半径 蜗轮齿根圆半径 名称
rg2 rf2 代号
模数 传动比 蜗杆头数 涡轮齿数 蜗杆直径系数 蜗轮变位系数
m i z1 z2 q x2
m=2a/(q+z2+2x2) i=n1/n2=z2/z2 z1=1~4 z2=iz1 q=d1/m x2=a/m-(d1+d2)/2m
5.00 35.00 1 35 18.000 0.0000
设计取值 36 测量值 z1=1 测量值 z2=36 测量值 设计取值 设计取值 测量值: ∮110蜗杆孔至蜗 轮孔∮224 133.6 ∮110蜗杆孔至蜗 轮孔∮180小孔 132.7 3°10′47″ 3°10′47″ 20°51′10″
rg2=a-0.5da2 rf2=0.5da1+0.2m 公式
蜗杆直径系数表格
蜗杆直径系数表格篇一:蜗轮蜗杆基本参数计算5.8.3 蜗杆蜗轮基本参数及几何尺寸计算蜗杆直径系数蜗杆蜗轮的设计计算是以主剖面内的参数和几何关系为基准,在主剖面内有基本参数 m,α,z2,*=1,c =0.2。
但对于蜗杆而言,其分度圆直径 d1 还可以有无数个不同值。
由于工程中是采用与蜗杆尺寸基本相同的滚刀来加工蜗轮的,如果对应一种模数和压力角有无数个蜗杆直径,那么意味着一种模数和压力角就得备有无数把滚刀,这显然是不经济的。
为了限制蜗轮滚刀的数目及便于滚刀的标准化,工程上每一标准模数规定了一定数目的蜗杆分度圆直径 d1,也即规定比值(5.8.3-1) q 称为蜗杆直径系数蜗杆直径系数(diametric quotient),且已规定有标准值。
模数 m 和直径系数 q 的标准值见表 5.8.3-1。
蜗杆直径系数由上式可得蜗杆的分度圆半径为 5.8.3表 5.8.3-1 m q m q (7) 9 (11)1 14 8 1.52 13 (9) 8 (11) 10 2.5 3 12 12 14 9 16 (3.5) 4 11 18(4.5) 5(5.8.3-2)6 9 (11) 2510 (12) 20 8注:?.括号内的模数尽可能不用。
?.带括号的 q 值用于套在轴上的齿圈,需要提高蜗杆的刚度或蜗轮齿数较多的场合。
蜗杆分度圆柱螺旋线1导程角λ 蜗杆分度圆柱螺旋线导程角λ2如图 5.8.3-1 所示,蜗杆螺旋面与分度圆柱面的交线为螺旋线,设 z1=2,则有两条螺旋线。
将分度圆柱展成平面,则螺旋线展成斜直线。
图中与λ有关的参数有: H ?? 导程,且 H=z1Pa1Pa1 ?? 轴面齿距,即Pa1=πm 图 5.8.3-1 由图得由此看出影响λ大小的因素有 z1、q。
?.当 q 一定,蜗杆的齿数 z1 增多,螺旋线导程角λ增大; ?.当 z1 一定,蜗杆的直径系数 q 增大(也即直径 d1 增大),螺旋线导程角λ减小。
蜗杆与蜗轮主要参数及几何计算
蜗杆与蜗轮主要参数及几何计算一、蜗杆与蜗轮的主要参数1. 模数:蜗杆和蜗轮的齿轮尺寸参数之一,用来描述蜗轮齿数与蜗杆齿数的比例关系。
模数的单位通常为毫米(mm),常用的模数有0.5、1、1.5、2等。
2.蜗杆传动比(减速比):蜗杆与蜗轮之间齿轮传动的转速比,一般用i表示。
传动比等于蜗轮的齿数除以蜗杆的齿数,即i=Z2/Z1、蜗杆传动比通常为10至80左右。
3.螺旋线角度:蜗杆的螺旋线与轴线的夹角,通常用θ表示。
螺旋线角度决定了蜗杆的斜度,直接影响到蜗杆与蜗轮传动的效率。
4.蜗杆和蜗轮的材料:由于传动过程中会有相对滑动和高速摩擦,所以蜗杆和蜗轮通常使用耐磨、耐热、耐疲劳的材料,比如高强度合金钢、铜合金等。
5.渐开线角:蜗杆渐开线与垂直于轴线的圆柱面交线的夹角,用α表示。
渐开线角的大小会直接影响到蜗杆与蜗轮的传动效率和噪音。
二、蜗杆与蜗轮的几何计算1.蜗杆的直径计算:蜗杆的直径可以根据承受的转矩和材料的强度来确定。
通常根据公式d=K∛(T/σ)计算,其中d为蜗杆直径,K为一个系数,T为扭矩,σ为所选材料的强度。
2.蜗杆和蜗轮的齿数计算:蜗杆和蜗轮的齿数需要满足传动比和滚动角度等要求。
通常滚动角度为20°时,蜗杆的齿数为4至6;滚动角度为15°时,蜗杆的齿数为6至9、齿数的具体计算可以根据所选的传动比和齿轮的模数来确定。
3. 蜗轮的直径计算:蜗轮的直径需要根据滚动角度和蜗杆直径来确定。
一般来说,蜗轮的直径大于或等于蜗杆的直径。
可以根据公式d2 =d1 + 2mcosα 计算,其中d2为蜗轮的直径,d1为蜗杆的直径,m为模数,α为渐开线角。
4.蜗杆传动比的计算:蜗杆传动比等于蜗轮的齿数除以蜗杆的齿数。
根据所选的传动比和蜗杆的齿数,可以计算出蜗轮的齿数。
以上是蜗杆与蜗轮的主要参数和几何计算的介绍,这些参数和计算方法的正确选择和应用,能够保证蜗杆与蜗轮传动的效率和可靠性。
在实际应用中,还需要考虑到摩擦和磨损等因素,选择适当的润滑方式和材料,以提高传动的效率和寿命。
圆柱蜗杆蜗轮传动主要参数及几何计算
圆柱蜗杆传动主要参数及几何计算设计圆柱蜗杆传动时,均取给定平面上的参数和几何尺寸作为主要参数,参考齿轮传动的计算关系进行几何计算。
1. 蜗杆传动主要参数∙普通圆柱蜗杆的基准齿廓普通圆柱蜗杆的基准齿廓是指基准蜗杆在给定截面上的规定齿廓。
在蜗杆的轴平面内基准齿廓的尺寸参数包括:∙齿顶高:Ha = m(正常齿)ha = 0.8m(短齿)∙工作齿高:h’ = 2m(正常齿)h’ = 1.6m(短齿)∙轴向齿距:Px = πm (中线上的齿厚等于齿槽宽)∙顶隙:c = 0.2m,必要时可减小到0.15m或增大到0.35m∙齿根圆角:ρf = 0.3m, 必要时可减小到0.2m或增大到0.4m∙齿形角:阿基米德蜗杆,轴向齿形角αx = 20°,法向直廓蜗杆,法向齿形角αn = 20°,渐开线蜗杆,法向齿形角αn = 20°∙模数、蜗杆分度圆直径和直径特性系数1)模数m 在中间平面上的模数为标准值,即蜗杆的轴向模数mx和蜗轮的端面模数mt为标准值。
2) 蜗杆分度圆直径d1要保证蜗杆与蜗轮的正确啮合,蜗轮加工是用和与该蜗轮相啮合的蜗杆的直径、齿形参数完全相同的滚刀进行切制。
为了减少加工蜗轮的滚刀的规格数量,利于蜗轮滚刀的标准化和系列化,国标规定d1为标准值,且与m有一定的搭配关系。
3) 蜗杆直径特性系数q由于蜗杆分度圆直径d1和蜗杆模数m均为标准值,定义它们的比值为蜗杆直径特性系数,即d1 = mq。
∙蜗杆头数Z1和蜗轮齿数Z2蜗杆头数Z1是指蜗杆圆柱面上连续齿的个数,也就是螺旋线的线数。
常用取值为1,2,4,6。
Z1过多,加工制造的难度增加,精度不易保证;Z1减小,传动效率降低,传动比较大或要求自锁时取Z1=1。
蜗轮齿数Z2根据传动比i和Z1确定。
Z2 = i Z1。
为避免蜗轮轮齿发生根切和保证传动的平稳性,一般取蜗轮齿数Z2>27;同时为避免结构尺寸一定时,模数过小而导致弯曲强度不足或模数一定时,蜗轮直径过大而导致蜗杆轴支撑跨距过大从而刚度降低,蜗轮齿数也不宜过大,一般取Z2<80。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
df2 px p2 sx sn hn1 L
df2=d2-2hf2 px=3.14m p2=3.14mz1 sx=0.5*3.14m sn=sxconγ hn1=m 见表14-4-69 取公式L≥(11+0.1z2)m z1=1时
-20.400 3.140 3.140 1.570 1.568 1.000 13.500 -15.000
-18.000 18.000 -18.000 20.000 -16.000
da1=100
测量值
da2=测量值: 新件186 (原件185.6) df1=测量值: 新件78 (原件76) 测量值: 件163 (原件161) 新
蜗杆齿根圆直径
df1
df1=d1-2.4m
15.600
蜗轮齿根圆直径 蜗杆轴向齿距 蜗杆导程 蜗杆轴向齿厚 蜗杆法向齿厚 蜗杆分度圆法向弦齿高 蜗杆螺纹部分长度 蜗轮最大外圆尺寸
模数 传动比 蜗杆头数 涡轮齿数 蜗杆直径系数 蜗轮变位系数
m i z1 z2 q x2
m=2a/(q+z2+2x2) i=n1/n2=z2/z2 z1=1~4 z2=iz1 q=d1/m x2=a/m-(d1+d2)/2m
1.00 25.00 1 25 18.000 0.0000
设计取值 36 测量值 z1=1 测量值 z2=36 测量值 设计取值 设计取值 测量值: ∮110蜗杆孔至蜗 轮孔∮224 133.6 ∮110蜗杆孔至蜗 轮孔∮180小孔 132.7
da2max da2max=da2+2m
da2max=测量值: 新件、原件195
蜗轮缘宽度
b
b=(0.67~0.75)da1,z1大时取小值
15.000
b=测量值:新件、 原件65.7 rg2=测量值: 新件20 (原件40) 计算 备注
蜗轮咽喉母圆半径 蜗轮齿根圆弧半径 名称
rg2 rf2 代号
rg2=a-0.5da2 rf2=0.5da1+0.2m 公式
8.000 10.200
蜗轮蜗杆几何计算
3.180 3.180 20° 20.853 0.200 1.000 1.000 1.200 1.200 2.000 18.000
3°10′47″ 3°10′47″ 20°51′10″
蜗轮分度圆直径 蜗杆节圆直径 蜗轮节圆直径 蜗杆齿顶圆直径 蜗轮齿顶圆直径
d2 d1′ d2′ da1 da2
d2=mz2=2a-d1-2x2m d1′=(q+2x2)m=d1+2x2m d2′=d2 da1=(q+2)m;da1=d1+2ha1=d1+2ham da2=(z2+2+2x2)m =d2+2*ha2 蜗轮喉径
中心距
a
a=(d1+d2+2x2m)/2
蜗杆分度圆圆柱导程角 蜗杆节度圆圆柱导程角 蜗杆轴向齿形角 蜗杆(轮)法向齿形角 顶隙 蜗杆齿顶高 蜗轮齿顶高 蜗杆齿根高 蜗轮齿根/d1 γ γ ′ tanγ ′=z1/(q+2x2) α a=20° α n tanα n=tanα conγ c ha1 ha2 hf1 hf2 h′ d1 c=0.2m ha1=ham=(da1-d1)/2 一般取ha=1 ha2=(ha+x2)m=(da2-d2)/2 hf1=(ha+c)m=(d1-df1)/2 hf2=(ha-x2+c)m=(d2-df2)2 h′=2m d1=qm