物体识别中的颜色特征总结
识别物体的知识点总结
识别物体的知识点总结一、物体识别的基本概念1.1 物体识别的定义物体识别是指通过计算机视觉技术,将图像中的物体进行分类、识别和定位的过程。
主要包括物体检测、物体定位和物体识别等内容。
1.2 物体识别的应用物体识别在很多领域都有广泛的应用,包括智能交通、智能安防、智能制造、医学影像分析等。
1.3 物体识别的难点物体识别的难点主要包括视角、光照、遮挡、变形、复杂背景等因素对识别准确性的影响,以及训练数据的质量、模型的复杂度和计算效率等问题。
二、物体识别的基本技术2.1 物体检测物体检测是指在图像中定位和标记出物体所在的位置,主要包括目标检测和物体定位两个方面。
2.1.1 目标检测目标检测是指在图像中对不同类别物体进行分类和标记,主要包括常见的目标检测算法有Haar特征、HOG特征、卷积神经网络(CNN)、YOLO、SSD等。
2.1.2 物体定位物体定位是指确定图像中物体所在的位置,主要包括边缘检测、角点检测、区域生长等技术。
2.2 物体识别物体识别是指对图像中的物体进行分类和识别,主要包括基于特征的方法、基于深度学习的方法和传统机器学习方法。
2.2.1 基于特征的方法基于特征的方法主要包括SIFT、SURF、ORB、HOG等,通过提取图像的局部特征来进行物体识别。
2.2.2 基于深度学习的方法基于深度学习的方法主要包括卷积神经网络(CNN)、循环神经网络(RNN)、递归神经网络(RNN)等,通过学习数据的特征来进行物体识别。
2.3 特征提取特征提取是指从图像中抽取出代表图像本身的特征,主要包括颜色特征、纹理特征、形状特征等。
2.4 分类器分类器是指将提取出的特征输入到模型中并进行分类的算法,主要包括支持向量机(SVM)、K近邻(KNN)、朴素贝叶斯(Naive Bayes)、决策树(Decision Tree)等。
2.5 训练与评估训练是指通过给定的数据集对模型进行学习,评估是指对训练好的模型进行评估和性能测试。
图像识别中的特征提取及分类算法研究
图像识别中的特征提取及分类算法研究图像识别是计算机视觉领域的重要研究方向之一,广泛应用于人脸识别、物体检测、人工智能等领域。
而在图像识别中,特征提取和分类算法是关键步骤,对于提升图像识别的准确性和效率起着至关重要的作用。
本文将深入研究图像识别中的特征提取及分类算法,并进行详细阐述。
一、特征提取图像识别中的特征提取是将图像中的有用信息抽取出来,为后续的分类任务提供有效的特征表示。
常用的图像特征提取方法有颜色特征、纹理特征和形状特征等。
1. 颜色特征颜色特征是指利用图像中的颜色信息来进行特征表示的方法。
它可以通过统计图像中各个像素的颜色分布情况,或者利用颜色直方图、颜色矩等统计特征来进行描述。
在实际应用中,颜色特征常用于物体识别、图像分类等任务中。
2. 纹理特征纹理特征是指利用图像中的纹理信息来进行特征表示的方法。
纹理可以通过图像局部像素之间的灰度变化来描述,比如利用灰度共生矩阵、小波变换、Gabor滤波器等方法来提取纹理特征。
纹理特征对于纹理类物体的识别和分类具有较好的性能。
3. 形状特征形状特征是指利用图像中物体的外形和轮廓信息来进行特征表示的方法。
它可以通过计算物体的边缘信息、轮廓曲线、面积等参数来进行描述。
形状特征广泛应用于物体检测、目标跟踪等领域。
二、分类算法分类算法是通过对提取到的图像特征进行分析和学习,将图像分为不同的类别。
常用的分类算法包括传统的机器学习算法和深度学习算法。
1. 传统机器学习算法传统机器学习算法是指利用统计学方法和数学模型来进行图像分类的算法。
常见的传统机器学习算法有支持向量机(SVM)、K最近邻(KNN)、决策树等。
这些算法通过对训练样本的特征进行分析和学习,构建分类模型,从而对测试样本进行分类预测。
2. 深度学习算法深度学习算法是近年来发展起来的一种学习方法,它通过构建深层神经网络模型来进行图像分类。
深度学习算法在图像识别任务中取得了显著的突破。
常用的深度学习算法有卷积神经网络(CNN)、循环神经网络(RNN)等。
物体特征知识点归纳总结
物体特征知识点归纳总结一、物体的形状特征1. 几何形状:物体的形状可以通过几何学的概念来描述,比如点、线、面、体等。
常见的物体形状有圆形、方形、三角形、圆柱形、圆锥形、球形等。
2. 外形特征:物体的外形可以通过观察物体的轮廓来描述,比如锐角、圆润、平整、锯齿状等。
二、物体的颜色特征1. 主体颜色:物体表面的颜色可以通过光线反射、吸收、透射等现象来产生。
常见的颜色有红、黄、蓝、绿、紫、橙、黑、白等。
颜色对物体的识别和区分起着重要作用。
2. 斑纹、花纹、条纹:物体的表面可能有斑纹、花纹或条纹,这些图案往往与物体的特定属性或特征相关。
三、物体的质地特征1. 触感:物体的质地可以通过触摸来感知,比如光滑、粗糙、软硬、湿润等。
2. 材料:不同的物体可能由不同的材料组成,比如金属、塑料、纸张、布料等。
这些材料具有各自的独特质地和特性。
3. 透明度:物体的质地还与透明度有关,比如玻璃、水晶等是透明的,而木头、金属等是不透明的。
四、物体的大小和重量特征1. 尺寸:物体的大小可以通过长、宽、高来描述。
不同大小的物体在不同场景下可能具有不同的功能和作用。
2. 重量:物体的重量是指其受到地球引力的作用所产生的力的大小。
重量可以通过称量仪器来测量,它是物体的重要物理属性之一。
五、物体的声音特征1. 声源:物体可以是声音的产生源,也可以是声音的传播载体。
物体的材料和结构对声音的传播和反射具有重要的影响。
2. 声响:物体有时也会产生声响,比如敲击木头会发出清脆的声音,而敲击铁器会发出沉闷的声音。
六、物体的温度特征1. 温度:物体的温度是指其内部分子或原子的平均运动速度。
温度可以通过温度计来测量,它是物体热力学属性之一。
2. 热传导:物体之间会发生热传导,比如冷热物体之间的热交换。
这种现象对物体的温度特征具有重要的影响。
七、物体的气味特征1. 气味:物体可能散发出特定的气味,这些气味可能来自物质的挥发性化合物,比如水果、花朵、香料等。
安检机识别常见图与安检机违禁品图颜色
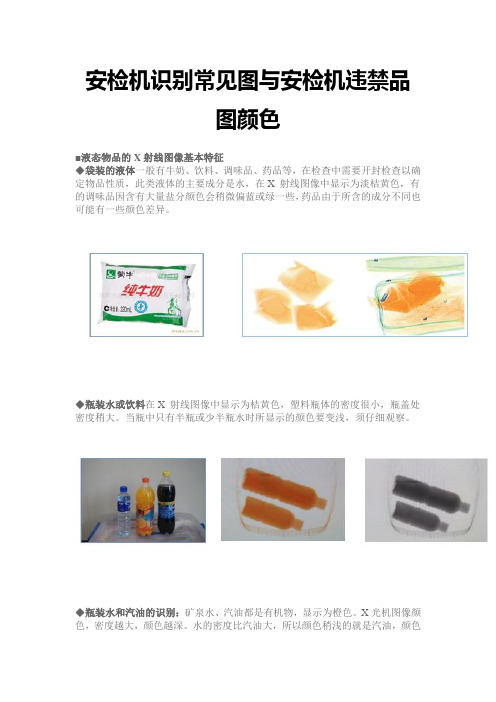
安检机识别常见图与安检机违禁品图颜色■液态物品的X射线图像基本特征◆袋装的液体一般有牛奶、饮料、调味品、药品等,在检查中需要开封检查以确定物品性质,此类液体的主要成分是水,在X 射线图像中显示为淡桔黄色,有的调味品因含有大量盐分颜色会稍微偏蓝或绿一些,药品由于所含的成分不同也可能有一些颜色差异。
◆瓶装水或饮料在X 射线图像中显示为桔黄色,塑料瓶体的密度很小,瓶盖处密度稍大。
当瓶中只有半瓶或少半瓶水时所显示的颜色要变浅,须仔细观察。
◆瓶装水和汽油的识别:矿泉水、汽油都是有机物,显示为橙色。
X光机图像颜色,密度越大,颜色越深。
水的密度比汽油大,所以颜色稍浅的就是汽油,颜色稍深的就是水。
图1:彩色显示图2:X光机黑白键处理后显示食用油机油洗洁精◆易拉罐的罐体为很薄的铝合金制成密度极小,内部充满液体,在X 射线图像中显示为桔黄色的圆柱体形状。
没有开封的易拉罐用手捏可以感觉到其内部有很强的压力。
◆瓶装酒的瓶体一般为玻璃或陶瓷制成,酒属于有机物,故在X 射线图像中显示为中间呈桔黄色,向外逐渐偏绿渐变,至边缘处形成颜色较深的瓶体外轮廓。
酒精固体酒精Zippo打火机油硫酸■易燃、压缩气体的X射线图像基本特征自动喷漆、空气清新剂、杀虫剂、打火机气体等一般被压缩成液态装在小型耐压金属罐内,大多属于有机物,与金属罐重叠后在X 射线图像中显示为黄绿色或蓝绿色,自动喷漆由于油漆内的颜料含有金属元素或矿物质,密度要稍大一些。
此类物品容器金属罐的上、下、侧面接缝处密度较大,在图像中呈线型圆环状,喷嘴处一般是一个密度较大的点,有的喷嘴外还有一个圆环。
自动喷漆空气清新剂杀虫剂打火机气体发胶摩丝胶水润滑剂脱模剂低温起动剂野营燃气炉边炉石油气打火机:对于打火机的辨认主要是看火头上的形状和色泽。
火头周围是一层金属因而是蓝色的,打火机机身是橙色的。
散装打火机排装打火机■烟花爆竹的X射线图像基本特征烟花爆竹的结构大多为火药、由粘土制成的隔堵、外层包裹纸构成。
物体识别与分类算法原理与方法详解

物体识别与分类算法原理与方法详解物体识别与分类是计算机视觉领域中的重要研究方向,目标在于让计算机能够像人一样识别和分类物体。
在实际应用中,物体识别与分类算法可以广泛应用于图像检索、智能安防、机器人导航等领域。
本文将详细介绍物体识别与分类算法的原理和常用的方法。
一、物体识别与分类算法原理物体识别与分类的核心原理是从图像中提取特征,并利用这些特征进行分类。
特征提取是物体识别与分类算法的关键步骤,它能够对图像进行表征,将图像中的物体特征与分类目标进行匹配。
常用的特征包括颜色、纹理、形状等。
在物体识别与分类算法中,一般会使用多种特征进行组合,以提高分类准确度。
物体识别与分类算法的原理可以分为以下几个步骤:1. 图像预处理:对输入图像进行预处理,如消除噪声、图像增强等,以提高后续特征提取的准确性和鲁棒性。
2. 特征提取:从预处理后的图像中提取特征。
常用的特征提取方法有颜色直方图、纹理描述子、形状特征等。
其中,颜色直方图可以描述图像的颜色分布情况,纹理描述子可以描述图像的纹理特征,形状特征可以描述图像的轮廓信息。
3. 特征选择与降维:对提取得到的特征进行选择和降维,以减少计算复杂度并保持分类性能。
常用的特征选择与降维方法有主成分分析(PCA)、线性判别分析(LDA)等。
4. 分类器设计:设计分类器将特征与分类目标进行匹配,并进行分类。
常用的分类器有支持向量机(SVM)、人工神经网络(ANN)、朴素贝叶斯分类器等。
这些分类器可以根据特征提取的结果进行训练,以获得最佳的分类模型。
5. 特征匹配与分类:将输入图像的特征与已训练好的分类模型进行匹配,得到物体的分类结果。
一般会根据匹配结果确定物体的类别,或者进行概率估计。
二、物体识别与分类算法方法1. 基于颜色特征的物体识别与分类算法:颜色特征是物体识别与分类中常用的特征之一。
常见的颜色特征提取方法有颜色直方图、颜色矩、颜色共生矩阵等。
这些方法可以描述图像的颜色分布情况,从而实现物体的识别与分类。
班本课程颜色总结

班本课程颜色总结班本课程颜色总结:探索色彩的奥秘色彩是视觉艺术中不可或缺的元素,它能够激发情感、传递信息和展现美感。
在本篇文档中,我们将对班本课程中所学的颜色进行总结,帮助大家更好地理解和运用色彩。
一、红、橙、黄——温暖的三原色1.红色:代表着热情、积极和力量。
在设计中,红色常用于强调重点,吸引注意力。
2.橙色:介于红色和黄色之间,象征着活力、快乐和创造力。
橙色适用于突出活力、欢乐的场景。
3.黄色:具有明亮、阳光的特点,代表着希望、智慧和快乐。
黄色常用于表达积极、向上的氛围。
二、绿、蓝、紫——冷静的三原色1.绿色:代表着自然、和谐与生机。
在设计中,绿色常用于表现自然、环保等主题。
2.蓝色:具有冷静、稳重的感觉,象征着智慧、信任和稳定。
蓝色适用于表达专业、严谨的氛围。
3.紫色:代表着神秘、高贵和创造力。
紫色常用于表现高雅、浪漫的场景。
三、色彩的搭配与运用1.类似色搭配:选择相近的颜色进行搭配,如红、橙、黄等,使画面更加和谐。
2.对比色搭配:选择相对的颜色进行搭配,如红与绿、蓝与橙等,使画面更具视觉冲击力。
3.互补色搭配:选择互补的颜色进行搭配,如红与绿、黄与紫等,使画面更加丰富。
4.色彩的明暗、饱和度调整:通过调整色彩的明暗、饱和度,可以表现出不同的氛围和情感。
四、色彩在实际应用中的注意事项1.符合主题:选择与主题相符合的色彩,使作品更具表现力。
2.均衡和谐:色彩搭配要均衡,避免过于突兀或单调。
3.重视文化差异:不同文化背景对色彩的认知和喜好有所不同,要考虑到目标受众。
4.创新尝试:在遵循基本规律的基础上,勇于尝试新的色彩搭配,为作品增色添彩。
总结:色彩是我们生活中不可或缺的元素,通过学习和总结,我们可以更好地运用色彩,为我们的作品增添魅力。
颜色特征提取

颜色特征提取
颜色特征提取是指从图像中提取出颜色特征的一种方法。
它是一种基于计算机视觉的技术,能够提取出图像中的一些有用的信息,如颜色、纹理和其他的颜色特征,从而实现图像的分类、检索等功能。
(二)颜色特征提取的常用方法
1.HSV颜色模型:HSV模式是一种将颜色表示为三个连续变量
H(Hue)、S(Saturation)、V(Value)的色彩系统,它可以以连续色调的形式来表达颜色,比RGB模式更加符合人眼的观感。
2.YUV颜色模型:YUV模型是一种将色彩表示为三个分量Y、U、V的方法,Y代表亮度(luminance),U、V代表彩度(chrominance)。
YUV模型可以空间分解,即将一种颜色分解成YUV三个分量,从而便于计算机对色彩的处理。
3.GLCM纹理特征:GLCM是Gray-Level Co-occurrence Matrix 的缩写,指的是灰度共生矩阵,是用来描述图像纹理特征的一种常用算法。
它的原理是提取出灰度值相邻像素之间的关系,从而获取其空间结构和灰度分布特征。
(三)颜色特征提取的用途
1.图像分类:颜色特征提取技术可以提取出图像中的颜色特征,比如颜色、纹理和其他信息,从而可用于图像分类,帮助系统更好地理解图像。
2.图像检索:颜色特征提取可以用于图像检索,例如,在图像检索系统中,可以使用颜色特征提取技术来查找出与搜索图像最相似的
图像。
3.物体识别:颜色特征提取可以用作物体识别,例如,可以使用颜色特征提取技术来识别物体,帮助机器人以及自动检测软件更准确地识别物体。
观察物体单元知识点总结

观察物体单元知识点总结观察物体是自然科学课程中的重要一部分,主要包括观察物体的形状、颜色、材质、光泽、重量等性质。
本单元的教学目标是培养学生的观察力和实验操作能力,让他们通过观察、实验,掌握物体的基本性质,提高科学素养和实践能力。
一、观察物体的形状观察物体的形状是我们最常见的观察对象,我们可以通过裸眼观察或借助显微镜等工具来观察物体的形状。
在观察物体形状的过程中,我们需要注意以下几点:1. 观察物体的整体形状:物体的整体形状可以是圆形、方形、长方形、三角形等不同的形状,学生需要能够准确地描述和识别各种形状。
2. 观察物体的边缘形状:物体的边缘形状可以是圆滑的、锐利的、棱角分明的等,学生需要通过观察和摸索来识别物体的边缘形状。
3. 观察物体的表面形状:物体的表面可以是平整的、颗粒状的、不规则的等,学生需要用手触摸或直接观察来感知物体的表面形状。
二、观察物体的颜色观察物体的颜色是我们日常生活中的常见活动,学生需要通过观察不同颜色的物体,来识别和描述物体的颜色特征。
观察物体颜色时,应注意以下几点:1. 观察物体的颜色:物体的颜色可以是红色、橙色、黄色、绿色、蓝色、紫色等不同的颜色,学生需要通过观察来准确地描述物体的颜色。
2. 观察物体的颜色深浅:物体的颜色深浅可以有不同的层次,学生需要通过观察来描述物体的颜色深浅程度。
3. 观察物体的颜色变化:物体的颜色在不同光线和背景下可能会产生一定的变化,学生需要通过观察来感知物体的颜色变化。
三、观察物体的材质观察物体的材质是我们可以通过触摸和感知来实现的一种活动,学生需要通过手感和观察来探索物体的材质。
观察物体的材质时,应注意以下几点:1. 观察物体的材质质地:物体的材质可以是光滑的、粗糙的、硬的、软的等,学生需要通过触摸和摸索来感知物体的材质质地。
2. 观察物体的材质温度:物体的材质温度可以是冷的、热的等,学生需要通过触摸来感知物体的材质温度。
3. 观察物体的材质弹性:物体的材质弹性可以是有弹性的、无弹性的等,学生需要通过捏、拉、压等动作来感知物体的材质弹性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
色调(主波段)
C1 = SC S + (1 − S )C
色饱和度(白色和色调的相对比例)
2010-5-15 CV:Color 22
HSV颜色空间
根据色调(hue)、色 饱和度(saturation) 和明度值(value)建立 HSV颜色模型. 相近模型: HSL(Lightness)、 HSI(Intensity)
2010-5-15
G (0.214,0.710) (0.290,0.600,) (0.274,0.717) (0.268,0.588)
CV:Color
B (0.140,0.084) (0.150,0.060) (0.167,0.009) (0.150,0.070)
15
(0.670,0.323) (0.640,0.330) (0.735,0.265) (0.628,0.346)
与黑白模拟电视信号保持兼容
2010-5-15 CV:Color 16
YCbCr
YUV用于模拟系统,YCbCr用于数字系统, YPbPr用于模拟视频,YUV与YCbCr常混用。 存在多种采样格式
YUV444, YUV422, YUV411, YUV420P等
2010-5-15
CV:Color
17
R G B C M Y Y U V
RGB2HSV
2010-5-15 CV:Color
pic from wikipedia
23
HSV颜色空间-2
色调值:颜色矢量与参考矢 R, G , B ∈ [0,1] 量的夹角
M = max(R, G, B )
m = min (R, G, B )
色度(Chroma):
C = M −m
C =0 ⎧undefined , ⎪((G − B ) C ) mod 6, M = R ⎪ H′ = ⎨ ⎪((B − R ) C ) + 2, M = G ⎪((R − G ) C ) + 4, M = B ⎩
2010-5-15 CV:Color 18
线性颜色空间的问题
通过基色的比例关系定义不同色彩,难以用准 确数值表示,定量分析比较困难. 各基色成分的相关性很高,受亮度变化影响大. 人眼通过颜色的亮度、色调以及饱和度区分物 体,不能直接感觉基色的比例. 不是一致的颜色空间,即不能用一致的尺度度 量颜色差异,因此不能有效的比较颜色. 主要用于颜色显示,难以进行图像的处理与分 析.
⎡C ⎢M ⎢ ⎢Y ⎣
2010-5-15
⎤ ⎡1⎤ ⎡ R ⎤ ⎥ = ⎢1⎥ − ⎢ G ⎥ ⎥ ⎢ ⎥ ⎢ ⎥ ⎥ ⎢1⎥ ⎢ B ⎥ ⎦ ⎣ ⎦ ⎣ ⎦
CV:Color 11
XYZ
定义颜色是三基色X, Y, Z的加权组合:
C = X ( X ) + Y (Y ) + Z ( Z )
(X),(Y),(Z)是基色量, X,Y,Z是比例系数
1 . 7517 4 . 5907 0 . 0565
1 . 1302 ⎤ ⎡ R ⎤ 0 . 0601 ⎥ ⎢ G ⎥ ⎥⎢ ⎥ 5 . 5943 ⎥ ⎢ B ⎥ ⎦⎣ ⎦
12
规范化XYZ颜色空间(Nxyz)
对X,Y,Z三基色规范化:
X , X +Y + Z Y y= , X +Y + Z Z z= X +Y + Z x=
第三讲 颜色 Lecture 3 Color or Colour
颜色
颜色通常认为是由于不同波长的光作用于 视觉系统,并引起不同刺激的结果. 光是由不同波段的光谱组成的,每个波段 称为一个通道,各种波长的光的不同比 例,形成不同的颜色,如短波光能量较大 时呈现蓝色,相反呈现红色. 颜色是一种令人感兴趣的图像特征.
Nrgb, Nxyz, L*a*b*, L*u*v*, HSV(HSI)
补充材料:/wiki/Category:Color_space
2010-5-15 CV:Color 7
RGB
以具有确定光通量的红、绿、蓝三基色作 为三维空间的基
2010-5-15
CV:Color
2010-5-15
CV:Color
6
3.2 颜色表示
不同的颜色表示方法(或称颜色模型,颜 色系统等等)都对应一个颜色空间(color space),一种颜色是相应颜色空间中的一 个点或矢量. 线性颜色空间(RGB模型的线性变换)
RGB, CMY, XYZ, YIQ, YUV
非线性颜色空间(RGB模型的非线性变换)
H = 60 0 × H ′
2010-5-15 CV:Color
pics from wikipedia
24
HSV颜色空间-2
明度值:图像亮度
V = max( R, G , B )
色饱和度值:相对于全饱和色的比例
max (R, G , B ) − min (R, G , B ) V
S=
2010-5-15
2010-5-15 CV:Color 9
CMY
以青(Cyan),品红(Magenta),黄 (Yellow)为三基色,其余同RGB颜色空间.
2010-5-15
CV:Color
10
RGB空间与CMY空间的关系
在RGB颜色空间中,颜色的形成是由黑到 白的增色处理过程,用于屏幕的彩色输 出. 在CMY颜色空间中,颜色的形成是由白到 黑的减色处理过程,用于绘图和打印的 彩色输出.
2010-5-15 CV:Color 2
3.1 人类颜色感知
可见光的波长分布在380nm到780nm之间, 人的颜色感觉是不同波长的可见光刺激人 的视觉器官的结果. 人类视网膜上有两类细胞:杆体细胞和锥 体细胞. 对颜色的区分主要由锥体细胞完 成.
2010-5-15
CV:Color
3
Young-Helmholtz三色假说(Trichromacy)
存在三种具有不同响应的锥体感受器. 当 光线同时作用于这三种感受器时,三者产 生的刺激不同,不同刺激的组合形成不同 的颜色感觉.
(Young-Helmholtz, 1891)
三色假说得到了现代技术发展的证明:
在人类视网膜中确实含有三种不同的光敏感性 视色素,它们对光谱不同部位的敏感性是不同的.
2010-5-15 CV:Color 4
2010-5-15 CV:Color 19
椭圆区域(放大 显示)表示人眼 无法与椭圆中心 颜色进行区分的 颜色范围,椭圆 的大小、方向随 着中心位置的变 化而变化,因此 不能用空间中的 欧式距离度量颜 色差异
Nxyz空间非一致性示意图
2010-5-15 CV:Color 20
颜色的三个基本属性
色调(Hue)由物体反射光中占优势的波 长决定(主波段),是颜色的最重要属性, 决定基本的颜色感觉. 色饱和度(Saturation)指颜色的鲜明程 度,饱和度越高,颜色越深,如深红、浅 红等. 明度(Value)是光波作用于感受器的强 度.
只需考虑两个独立分量:
CIE 1931年x-y色度图
2010-5-15 CV:Color 13
ቤተ መጻሕፍቲ ባይዱ
规范化XYZ-2
• 色度图中的颜色范围可以表示成直线段或 多边形.
互补色 主波段
2010-5-15
CV:Color
14
几种颜色模型在 x-y色度图中的位 置:
R NTSC 制式 PAL 制式 CIE 模型 彩色监视器
H2 C C2 V L I Y′601 SHSV SHSL SHSI n/a 0.000 0.000 1.000 1.000 1.000 1.000 0.000 0.000 0.000 n/a 0.000 0.000 0.500 0.500 0.500 0.500 0.000 0.000 0.000 n/a 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.000 0.0° 1.000 1.000 1.000 0.500 0.333 0.299 1.000 1.000 1.000 60.0° 0.750 0.750 0.750 0.375 0.500 0.664 1.000 1.000 1.000
YUV & YIQ
视频设备常用颜色空间 Y:亮度(luminance)分量, 感觉亮度; Y’:Gamma校正后的Y,电压亮度。 U = B-Y,V = R-Y:色度(chrominance)分量 U和V各自旋转33度,得到I和Q。
⎡Y ′⎤ ⎡ 0.299 ⎢U ⎥ = ⎢- 0.147 ⎢ ⎥ ⎢ ⎢V ⎥ ⎢ 0.615 ⎣ ⎦ ⎣ 0.114 ⎤ ⎡ R ⎤ - 0.289 0.436 ⎥ ⎢G ⎥ ⎥⎢ ⎥ - 0.515 - 0.100⎥ ⎢ B ⎥ ⎦⎣ ⎦ 0.587 ⎡Y ′⎤ ⎡0.299 ⎢ I ⎥ = ⎢0.596 ⎢ ⎥ ⎢ ⎢Q ⎥ ⎢0.212 ⎣ ⎦ ⎣ 0.587 - 0.275 - 0.523 0.114 ⎤ ⎡ R ⎤ - 0.321⎥ ⎢G ⎥ ⎥⎢ ⎥ 0.311⎥ ⎢ B ⎥ ⎦⎣ ⎦
8
规范化RGB(Nrgb)
三基色的加权混合,不仅反映了颜色的色 度,而且反映了颜色的亮度. 如果只对色 度感兴趣,希望颜色不依赖于亮度变化, 则只需考虑R,G,B之间的比例关系:
G B R r= ,g = ,b = R+G + B R+G + B R+G + B
• r, g, b称为色度坐标,只有两个坐标是 独立的,形成二维色度空间.
满足以下条件: 1. 三色比例系数X,Y,Z大于零; 2. Y的数值等于彩色光的亮度; 3. 当X=Y=Z时表示标准白光.
⎡ ( X ) ⎤ ⎡ 2 . 7689 ⎢ ( Y ) ⎥ = ⎢ 1 . 0000 ⎥ ⎢ ⎢ ⎢ ( Z ) ⎥ ⎢ 0 . 0000 ⎦ ⎣ ⎣