矿井运输提升之矿井提升运动学及动力学
矿井运输提升ch0_1_12.1.1.2 电子教案

第二篇矿井提升设备第二篇矿井提升设备课程内容0. 绪论1.提升容器2.提升钢丝绳3.矿用提升机4.提升机与井筒相对位置5.矿井提升运动学及动力学主要内容1.矿井提升设备的任务及特点2.矿井提升设备的主要组成部分3.矿井提升设备的分类0.1矿井提升设备的任务及特点1.矿井提升设备的任务沿井筒提升煤炭、矸石、升降人员和设备,下放材料。
矿井提升——是矿山地面与井下生产系统联接的枢纽,是矿井生产的咽喉。
0.1矿井提升设备的任务及特点1.矿井提升设备的任务沿井筒提升煤炭、矸石、升降人员和设备,下放材料。
矿井提升——是矿山地面与井下生产系统联接的枢纽,是矿井生产的咽喉。
2.矿井提升设备的特点1)安全性2)可靠性3)经济性0.1矿井提升设备的任务及特点1.矿井提升设备的任务沿井筒提升煤炭、矸石、升降人员和设备,下放材料。
矿井提升——是矿山地面与井下生产系统联接的枢纽,是矿井生产的咽喉。
2.矿井提升设备的特点1)安全性——不能发生突发性安全事故矿井提升设备属高速、重载大型机电设备,提升速度达25m/s、一次提升量达50t;安全性:涉及人员、财产安全。
0.1矿井提升设备的任务及特点1.矿井提升设备的任务沿井筒提升煤炭、矸石、升降人员和设备,下放材料。
矿井提升——是矿山地面与井下生产系统联接的枢纽,是矿井生产的咽喉。
2.矿井提升设备的特点2)可靠性——具有长期无故障连续运转能力矿井提升设备属矿山固定设备,服务年限长,任务重,运转频繁,其大修时间要求在20年以上。
可靠性:涉及矿井的正常生产。
0.1矿井提升设备的任务及特点1.矿井提升设备的任务沿井筒提升煤炭、矸石、升降人员和设备,下放材料。
矿井提升——是矿山地面与井下生产系统联接的枢纽,是矿井生产的咽喉。
2.矿井提升设备的特点3)经济性——设备造价与运行费用合理。
矿井提升设备属大型机电设备,功率大、耗电量多,其经济性是矿井生产技术的经济指标。
大型提升机功率都在1000kw以上,目前国产最大功率3200kw。
矿井运输提升工程1
矿井运输提升
d、钢轨的内倾度 钢轨内倾度就是两股钢轨的垂直中心线, 向线路内侧倾斜成1/20的坡度。
目的: 大小的判定:
矿井运输提升
e、坡度
线路纵剖面上相邻两点间的高度差与这两点间 的水平距离之比称为线路坡度 通常用千分数表示
轨道坡度(一般为3‰~6‰)主要是由井下排水 的需要决定的,当排水量较大时可适当减小轨道(巷 道)坡度以利轨道运输
618-1/3-12右(左)
对称道岔 渡线道岔
矿井运输提升
624-1/4-6右(左) …….. ………..
《矿井运输提升》
资源与环境工程学院
矿井运输提升
绪论
运输
矿 井 提 升 运 输
矿井运输部分:轨道运输设备(轨道、电机车、矿 车等)及其它运输设备、井底车场运输等。
提升
矿井提升部分:主要是竖井提升,包括单绳提升、多绳 提升。提升运动学和动力学等内容
矿井运输提升
矿井运输提升的任务
• • • • 我国的矿物主要是采用矿井地下开采 开拓过程也需要将废石运出 担负人员运输任务 开采、掘进所需设备需及时运至井下
注:主要运输线路直线段目视直顺.用10m弦量不超过
10mm;曲线段目视圆顺,用2m弦量相邻正矢差:半径 50m以上不超过2mm,半径50m以下不超过3mm
矿井运输提升
c、轨面前后高低 轨道纵向出现坑洼或凸起,称为轨面前 后高低
注:用10m弦量,主要运输线路不超过10mm, 一般运输线路和倾斜绞车道不超过15mm
V≥3.5m/s时,c=15
S2—车辆的定轴距(运行车辆中最大定轴距)
矿井运输提升
(2)轨距加宽△S0
取决于车辆的定轴距S2、弯道半径R和自由间隙 e(取10mm)
36(时)矿井运输提升课程教学大纲ok
矿井运输提升教学大纲一、课程中英文名称中文名称:矿井运输提升英文名称:Mine Pit Transportation Promotion二、授课对象及学时采矿工程总学时32 实验3学时三、本课程与其它课程的联系与分工先修课程:地下开采后修课程:矿山规划与设计、毕业设计四、课程教学的目的、任务和性质本课程是根据采矿工程专业培养目标及教学计划的要求而设置的专业基础课。
本课程主要研究矿井提升运输机械的基本结构性能、工作原理、选型和机械设计计算及电气控制原理等。
通过对本门课程的学习,要求学生对矿山提升运输机械的结构性能和工作原理有比较完整的认识和了解,掌握矿井生产设计过程中相关的设备选型设计方法。
并了解设备的最新技术发展动向,具有对矿井提升运输设备使用、维护及进行技术改造的基本能力。
五、课程教学的主要内容(一)课堂讲授(32学时)第一章绪论(讲课2学时)知识点:矿井提升运输的任务、特点及所用设备的要求;矿井运输提升的地位与作用;井下运输设备的类型及特点。
我国金属矿床地下开采运输机械的发展概况。
国外矿井运输机械的发展现状。
重点:矿井运输提升的地位与作用;难点:井下运输设备的类型及特点第二章带式输送机(2学时)知识点:矿用胶带输送机的结构特点、带式输送机的基本组成部件的基础、熟悉井下胶带输送机的特殊结构和选型计算。
胶带运转中的几个问题。
重点:选型计算难点:运转中的几个问题第三章矿井窄轨铁路运输(讲课8学时)知识点:矿井轨道与车辆、矿用电机车结构组成;电机车运动理论:列车运行方程;机车牵引力及机车制动力。
电机车运输计算。
重点:列车运行理论、电机车运输计算难点:矿用电机车结构组成及运动理论第四章矿井辅助运输设备(2学时)知识点:电耙运输、卡车运输;其它类型辅助运输设备。
重点:各种辅助运输的优点、缺点和适用条件难点:电耙运输第五章竖井提升(8学时)知识点:竖井提升容器箕斗与罐笼;竖井提升容器选择;提升钢丝绳的结构、选择与使用;矿井提升机;矿井提升运动学与动力学;多绳摩擦提升机及其提升的若干问题;重点:竖井提升容器选择,提升钢丝绳选择与使用难点:矿井提升运动学与动力学第六章斜井提升(3学时)斜井各种提升方式;各种提升方式选型计算的特点;各种提升方式的使用条件。
018矿井运输和提升

第三节
一、轨道
轨道运输
•井下巷道中铺设的轨道通常是窄轨。 •两条钢轨轨头内侧的距离叫轨距。根据车辆运行速度、流量及载重量选用不 同重量的钢轨和不同尺寸的轨距。我国的主要运输巷道用600mm轨距和11~ 18kg/m的钢轨,大中型矿井的主要运输巷道常用900mm轨距和18~24kg/m的 钢轨。
1-轨道中心线;2-钢轨;3-轨斜井箕斗提升系统 • 斜井箕斗提升系统与立井箕斗提升系统相似,但斜井箕斗在煤矿中采用后卸式箕斗, 由于斜井箕斗是在轨道上运行,故井筒内不设罐道。 (四)斜井串车提升系统 • 串车提升就是将一组重车在井下挂到钢丝绳上沿井筒提升到地面,摘下绳钩,再挂上 一组空车(或材料车)沿井筒下放到井底。由于直接提升矿车并沿轨道运行,故串车提 升只能用于斜井。考虑到井筒倾角过大时煤易撒落,故斜井串车提升时井筒倾角一般 不大于25°。 (五)斜井钢丝绳胶带输送机提升系统 • 钢丝绳胶带输送机提升系统是以钢丝绳胶带输送机作为主提升设备。由于斜井箕斗及 钢丝绳胶带输送机只能运载煤炭,因此,采用箕斗和钢丝绳输送机提升的矿井,必须 另外配置一套串车提升系统,以备运送材料、设备及矸石。
• •
轨道的错车处以及交叉和分支的地方需要设置道岔。常用的道岔有单开 道岔(DK)、对称道岔(DC)、渡线道岔(DX)三种类别。 矿井轨道线路中曲线曲率半径的确定与车辆运行速度和车辆轴距有关, 常用的曲率半径有6、9、12、15、20、25m等几种。
a-右开道岔;b-渡线道岔;c-左开道岔;d-对称道岔
第四节
矿井提升
一、矿井提升系统及提升设备的组成
(一)普通罐笼提升系统 – 1、矿井提升机与提升钢丝绳 – 矿井提升机有单绳缠绕式和多绳摩擦式两类。 – 2、罐笼 – 罐笼主要用于立井内升降人员、提升或下放物料。根据罐笼层数不同,又分为单层、双 层两类,每层又可分为单车和双车两种。在罐笼内设有供矿车停放的轨道和阻止矿车在 提升过程中跑出罐笼的阻车器和车挡。为了避免万一钢丝绳断裂造成坠罐事故,危及人 员的安全,罐笼上装设有可靠的断绳保险器,一旦钢丝绳拉断,断绳保险器将立即把罐 笼卡在罐道上或特制的制动钢丝绳上。 – 3、罐道 – 罐道由横截面为矩形的方木、钢轨或钢丝绳沿井筒敷设而成。作用是使罐笼在井筒中沿 一定的轨道运动,避免和减少罐笼在井筒中摆动而发生事故。。
下篇第五章矿井提升运动学及动力学
式中:D为提升机卷筒直径;i为减速器传动比;
ne为电动机额定转数。
如何确定最大提升速度?
由式(5-1)计算的最大提升速度vm,因每台提升机所选配的 电动机转数的不同和减速器速比的不同而具有有限的几个数
值,这有限的几个数值均称为提升机的标准速度—最大提升
速度。应该注意的是,选取vm时,即选择转速ne和传动比i时,
应使vm值接近vj值。其办法可从下列有关的表中查找(各表的
值是据式(5-1)计算得出的)。 例如:H=400m D=3 m
vj (0.3 ~ 0.5) H
vm
Dne
60i
(m
/
s)
转速n
传动比i
500
600
750
11.5
6.826 8.191 10.239
20
3.925 4.710 5.887
30
a1
0.75Fe
(k Qg m
pH )
(5-5)
式中:λ为电动机过负荷系数; Fe为电动机额定拖动力; Pe为电动机额定功率; 0.75为考虑电动机稳定运行而限制其最 大拖动力的系数。
(4)对于多绳摩擦提升,最大加速度a1 除了以上个限制因素外,还受到防滑条件 的限制。
(二)提升减速度a3的确定 提升减速度a3除了要满足上述《煤矿
(3)等速阶段t2:箕斗在此阶段以最大提升 速度vm运行,直至重箕斗将接近井口开始减 速时为止。
(4)减速阶段t3:重箕斗将要接近井口时, 开始以减速度a3运行,实现减速。
(5)爬行阶段t4:重箕斗将要进入卸载曲轨 时,为了减轻重箕斗对井架的冲击以及有利 于准确停车,重箕斗应以v4低速爬行。一般 v4=0.4~0.5m/s,爬行距离h4=2.5~5m。
6.13.16.13矿井提升设备运行理论
绘制速度图和力图
四、提升电动机容量的校核
在一次提升循环过程中,滚筒圆周上的拖动力和速度都 是变化的,通过验算才能确定初选的电动机是否满足要求。
验算内容按温升,过负载和特殊力等条件分别进行验算。
四、提升电动机容量的校核
电动机的等效功率一般按等效力和等效时间及额定转速来计算。 等效力为一个固定力,在该力作用下电动机连续运转的温升与在变力 变速条件下运转的温升相等。
W
0
jd
按照《煤矿安全规程》 规定要求,a1,a3均应小于 0.75m/s;按电动机过负载能 力确定;按减速器输出轴允 许的最大扭矩确定。
二、提升设备的运动学计算
二、提升设备的运动学计算
速度图计算完后,需重新验算提升能力富裕系数a f 。
三、提升系统的动力学计算
以摩擦式立井有尾绳提升系统为例,进行提升设备动力学计算, 为验算电动机功率及电器设备的选择计算提供依据
目录
CONTEபைடு நூலகம்TS
01
提升设备的 基本动力学
方程式
02
提升设备的 运动学计算
03
提升系统的 动力学计算
04
提升电动机 容量的校核
目标学习
01 了解摩擦提升机的运行特点 02 掌握摩擦提升机运行参数计算 03 校核电机、计算电耗
一、提升设备的基本动力学方程式
提升机在一次提升过程中,有加速、等速、 减速等运行阶段,提升系统是一个速度变化的运 动体系。它包括直线运动和旋转运动两种运动状 态。因为系统的速度是变化的,所以作用在滚筒 轴上的力矩也是变化的。提升设备的动力学就是 研究电动机作用在滚筒轴上的转矩或滚筒圆周上 的力的变化规律。
矿井运输与提升归纳总结资料
0. 地下矿山运输方式:机车运输。
带式输送机运输。
地下无轨运输。
无极绳运输1. 矿井轨道是由上部建筑和下部建筑所组成。
上部建筑包括钢轨、轨枕、道床和联接零件;下部建筑就是巷道底板。
2. 钢轨由轨头、轨腰和轨底组成。
作用是引导车辆运行,而且直接承受载荷,并经轨枕将载荷传递给道床及巷道底板.钢轨的型号是以每米长度的重量(kg/m )表示。
3. 轨枕的作用:固定和支承钢轨,使两根钢轨始终保持一定的距离,防止轨道产生横向和纵向移动,保持轨道的稳定性,并将钢轨的压力较均匀地传递给道床。
4. 联接零件的用途是在纵向把钢轨接在一起,并将钢轨固定在轨枕上。
联接零件有鱼尾板(道夹板)、螺栓、垫板及道钉。
5. 木质轨枕的优缺点;木质轨枕的能很好地保证轨道的稳定性;加工制作方便;具有足够的强度和弹性,以及钢轨在轨枕上的固定简便等,但木质轨枕容易腐朽,所以,通常应进行防腐处理,以延长它的使用年限。
6. 钢筋混凝土轨枕使用寿命长,维修费用少;抗压强度高;抗腐蚀性能好;取材和制造均方便。
但它的重量大、导电;增大轨道的整体刚度;铺设及修理的劳动强度大。
7. 道床作用:分压作用。
约束轨道框架。
增弹减振。
排水。
方便维修养护8. 轨道线路的坡度是线路纵断面上相邻两点的高度差与这两点间的水平距离之比,通常以千分数表示。
最理想的轨道线路坡度就是等阻坡度,即重列车下坡时的运行阻力等于空列车上坡时的运行阻力的线路坡度。
9. 轨道线路的坡度主要是由井下排水的需要决定的,一般为3‰~10‰。
如果坡度小于3‰,巷道排水较困难;坡度过大,电机车将难以牵引车组上坡运行,而且制动困难、不安全、轨道与车辆轮缘磨损严重。
10. 弯道特征要素用中心角α、曲线半径R 、曲线段弧长L 、切线长度T 等参数来表示,在设计图中应集中标注并标出曲线的中心O11. 最小弯道半径应根据车辆运行速度和轴距大小来确定。
当转角小于或等于90°,两轴车辆的运行速度小于1.5m/s 时,最小弯道半径不得小于轴距的7倍;运行速度大于1.5m/s 时,最小弯道半径不得小于轴距的10倍;运行速度大于3.5m/s 时,最小弯道半径不得小于轴距的15倍。
(完整版)矿井提升与运输课程设计终极版

应用采矿07-4 班穆绍龙学号21070107序号14目录1第二章第三章第四章结束语参考文献第一章刮板输送机选型设计2.1关于刮板输送机刮板输送机是一种挠性牵引机构的连续输送机械; 主要用于采煤工作面和采区巷道等恶劣条件下的煤炭运输。
作为采区巷道用的刮板输送机是由刮板链、溜槽、机头部、机尾部等基本部件组成,当刮板输送机用于机械化采煤工作面与滚筒采煤机和输送机推移装置配套使用时,其结构组成除有以上基本部件外,根据设备配套要求和工作需要,还有铲煤板、挡煤板、机头支撑推移装置等一些其他部件。
根据设计条件,预选SGW—730/180 型号刮板输送机,其链速为v=0.92m/s ,链单位长度质量q0 =36.26Kg/m ,1 条 26*92 的 C级圆环链的破断拉力为850KN,输送能力为Q=500t/h 。
刮板输送机计验算的内容包括:运输能力、运行阻力、刮板链张力、电动机功率链子的安全系数等。
2.2运输能力验算采煤机的工作面所需要的运输能力用下式计算:Q c===320t/h <500t/h式中: Q0为采煤机工作面平均每小时生产率,300t/h ;v 为刮板输送机的链速 ,0.92m/s ;v0为采煤机或刨煤机的牵引速度,4.6m/s 。
根据计算,输送能力满足要求。
2.3电动机功率验算刮板输送机的运行阻力按直线段和曲线段分别计算。
运行时除了要克服煤和刮板链的运行阻力外,还需克服煤和刮板链的重力。
通常将它们一起计为总运行阻力。
取0.6, 10.4 ,0.85,2.3.1重段直线段运行的总阻力F zh =qLg(ωcos β-sin β)+q l Lg( ωl cosβ-sin β)=97 ×200×9.8 (0.6 ×cos12°-sin12 °)+36.26 ×200×9.8 (0.4 ×cos12°-sin12 °)=124725 N2.3.2空段运行总阻力为:F k = q l Lg( ωl cosβ+sin β)=36.26 ×200×9.8 (0.4 ×cos12+sin12 °)=42783 N式中: F为重段直线段的总阻力,F k为空段直线段的总阻力,N;q 为中部槽单位长度上的装煤量,120Kg;q l为刮板链单位长度的质量,36.26Kg ;L 为刮板输送机的长度 ,200m;ω为煤在槽内运行的阻力系数,0.6 ;ωl为刮板链在槽内运行的阻力系数,0.4;β为倾斜角度 ,12 ° 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
矿井提升运动学及动力学
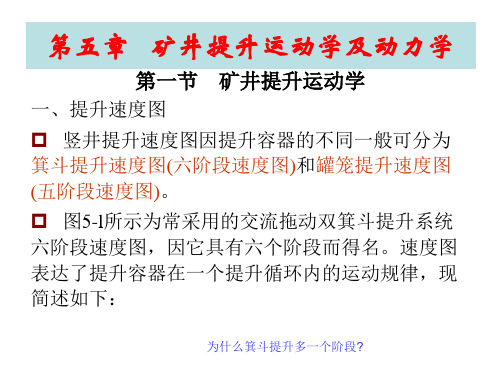
提升速度图
•提升设备在一个提升循环内其提升速度随时间
变化的关系图形,叫做提升速度图。
•对于底卸式箕斗,为保证箕斗离开卸载曲轨时
速度不能过高,需要有初加速阶段;为使重箕
斗上升到井口而进入卸载曲轨内运行时,减少
对井架、曲轨的冲击,提高停车的准确性,应
有一个低速爬行阶段,故箕斗提升采用六阶段
速度图。
•t0--初加速阶段运行时间,由于这时井上空箕斗在卸载曲轨内运行,故加速度不可过高,以免对设备产生过大冲击,箕斗滑轮离开曲轨时的速度vo≤1.5m/s;
•t1--主加速阶段运行时间
•t2--等速阶段运行时间
•t3--主减速阶段运行时间
•t4——爬行阶段运行时间,此时重箕斗上升到井口以上进入卸载曲轨运行,为减少对井架及曲轨的冲击,爬行
≤0.5m/s;
速度一般控制在v
4
•t5--抱闸停车阶段时间,
•θ——休止时间,即装卸载时间。
•对于罐笼提升,因无卸载曲轨的限制,故无需初加速阶段,开始就以较大的主加速度加速,但是为了准确停车(使罐笼内的轨道与车场轨道对齐),也需要有一爬行阶段,因此,普通罐笼提升采用五阶段速度图。
提升加速度的确定
1、箕斗提升初加速度a
为了保证提升开始时,空箕斗对卸载曲轨及井架的
冲击不致过大,箕斗离开卸载曲轨时的速度被限制
在Vo≤1.5m/s,根据目前大量通用的箕斗卸载
曲轨行程为2.13m,(新标准系列箕斗的卸载曲轨
=0.5m/s2。
行程为2.35m),所以一般初加速度a
o
2、主加速度a1的确定
主加速度a1 是按安全经济的原则来确定的,主
加速度的大小受《煤矿安全规程》、减速器强
度、电动机过负荷能力三个方面的限制。
综合考虑上述三个条件,按其中最小者确定主
的大小。
加速度a
1
•《煤矿安全规程》对提升加、减速度的限制:“立井中用罐笼升降人员时加速度和减速度,都
不得超过0.75 m/s2;斜井中升降人员的加速度和减速度,不得超过0.5 m/s2。
”
•对升降物料的加、减速度规程没有规定,一般
在竖井,加、减速度最大不超过1.2m /s2,斜井不超过0.7 m/s2。
•按电动机的过负荷能力来确定:根据电动机的最大平均出力应不小于加速阶段实际所需的最大出力,计算出主加速度a1的值。
•按减速度允许的输出传动转矩来确定:根据电动机通过减速器作用到卷筒主轴上的拖动力矩,必须小于减速器所允许的最大输出转矩,计算出主加速度a1的值。
•综合考虑上述三个数值,取最小者。
提升减速度的确定•提升减速度一般取与加速度相同值。
它不仅需要满足上述《煤矿安全规程》的规定,同时还与提升设备所采用的减速方式有关。
目前提升机的减速方式有以下三种:
自由滑行减速
电动机减速方式
制动减速方式
▲自由滑行减速:减速一开始,电动机便从电网上断开,提升系统拖动力为零,靠惯性自由滑行。
▲电动机减速方式:电动机减速方式为正力减速。
当采用自由滑行减速方式其减速度太大时,必须采用正力减速。
▲制动减速方式:此减速方式为负力减速。
当采
用自由滑行减速方式减速度太小时,必须对系统施加制动力。
制动减速方式有机械制动和电气制动两种
•因此,在确定提升系统减速度时,首先必须计算自由滑行减速度。
若自由滑行减速度太大,则必须采用电动机减速(正力减速)方式;若自由滑行减速度太小,则必须选择制动减速(负力减速)方式。
对于负力减速,当需要制动力较小时,可采用机械闸减速,当需要制动力较大时,须采用电气制动。
为安全可靠,副井提升设备都应采用电气制动。
提升系统静阻力
提升系统的静阻力包括静力和阻力。
静力包括货载重力、容器自重及钢丝绳重力;
阻力来源于提升容器在井筒中运行时空气的阻力,罐耳与罐道之间的摩擦阻力,钢丝绳在天轮和滚筒上的弯曲阻力及天轮轴承、滚筒轴承的阻力等。
提升系统静阻力的特点
(1)静阻力与容器的自重无关;
(2)在提升过程中,静阻力随提升容器位置的
不同,而发生变化,这种静阻力在提升过程中发生变化的现象称之为静力不平衡;
(3)在深井中以及钢丝绳较重时,静阻力有可能在提升终止前出现负值。
•对于立井有尾绳的系统,当提升主绳和尾绳重力相等时,静阻力不再随提升容器位置的改变而改变,如图中直线3所示,属静力平衡系统。
小结
1、掌握箕斗提升和罐笼提升的速度图和速度图
各段的含义。
2、了解提升系统静阻力的特点。
3、掌握加速度和减速度的确定方法。