直流电机起动仿真
maxwell电机仿真实例

maxwell电机仿真实例Maxwell电机仿真是电机设计和分析的重要工具,它能够帮助工程师快速准确地评估电机的性能,节省了大量的实验和设计成本。
本文将以一台直流电机为例,介绍Maxwell电机仿真的具体步骤和方法,并分析仿真结果,最后总结电机仿真的优势和应用价值。
1.电机的基本结构和工作原理直流电机是一种将电能转化为机械能的设备,它由定子和转子两部分组成。
定子上有绕组,在外加电压的作用下产生磁场,转子上有导体,当定子电流通过后转子受到磁力的作用而旋转。
当转子旋转时,通过与机械负载的连接可以进行功的转换。
2. Maxwell电机仿真的基本原理在进行Maxwell电机仿真时,首先需要建立电机的几何模型。
Maxwell可以通过导入CAD文件或手动建立几何模型来进行仿真。
然后需要定义材料特性和绕组参数,包括定子和转子的材料特性,绕组的线材材料、截面积和匝数等。
在建立完电机的几何模型和定义完材料特性后,可以进行电磁场仿真和热仿真,从而得到电机的性能参数和工作状态。
3. Maxwell电机仿真的具体步骤(1)建立几何模型在Maxwell中,可以通过导入CAD文件或手动建立几何模型来建立电机的几何结构。
在建立几何模型时,需要考虑到电机的细节结构,如绕组的匝数、绕组连接方式、转子的永磁体分布等。
(2)定义材料特性在Maxwell中,材料特性是进行仿真的基础。
需要为定子和转子分别定义材料特性,包括磁导率、电导率等参数。
对于绕组材料,需要定义其磁特性和电阻率等参数。
(3)定义边界条件和激励条件在进行电磁场分析时,需要定义边界条件和激励条件。
边界条件包括定子和转子的外形边界条件、绕组的通流条件等;激励条件包括外加电压、磁体的磁场分布等。
通过定义边界条件和激励条件,可以对电机的电磁场进行分析。
(4)进行电磁场分析在定义了几何模型、材料特性、边界条件和激励条件后,可以进行电磁场分析。
Maxwell可以计算电机的磁场分布、磁通密度、电磁力等参数。
直流电机仿真

一、仿真建模过程
仿真波形如下图:
图1-1 转速的波形,蓝色是PID,红色是Fuzzy SIMULINK仿真图:
图1-2 模型仿真图
仿真计算过程:
某直流电机确知参数:
24od U V =
P=50W
=0.57
R
L=0.57mh
n=3000 2GD 0.066=
具体的模型用传递函数表示如下
222
0.0260.570.078530303753750.007259m e GD R T s C ππ
⨯===⨯⨯⨯ 24 3.90.570.007259.min/3000
od d e U I R C v r n −−⨯=== 3
10.57100.0010.57
L T s R −⨯=== 传递函数
1:111/1/0.57 1.754410.00110.0011
R F T S S S ===+⨯++ 2:20.5710.07850.1377m R
F T S S S =
==⨯
说明:
图1-3 仿真波形说明1
图1-3红框中的波形下凹是在1S 钟处发生的,原因是我们在1S 钟左右加入了负载,如下
图1-4所示。
加入负载的一瞬间电机转速会变慢,然后由于控制算法,转速会自动调节至正常的速度。
图1-4 仿真波形说明2
二、仿真软件打开步骤
1、设置路径
图1-5 设置路径
2、打开仿真文件件
图1-6 打开Simulink仿真文件
图1-7 将Fuzzy导入matlab变量空间中
3、开始仿真
图1-8 按顺序设置Fuzzy并开始仿真4、仿真效果
图1-9 波形仿真效果图。
直流电机ansys仿真参数设置

直流电机ansys仿真参数设置
ANSYS仿真是直流电机进行模拟测试的重要工具,其可以分析模拟直流电机的物理性能参数,并针对不同应用需求提供相应的计算和调整。
本文将详细介绍ANSYS仿真设置参数的步骤,并以直流电机模拟测试为例,说明如何有效地设置参数。
首先,需要选择直流电机作为计算对象,然后配置模拟测试所需的相关参数。
具体而言,有必要考虑电机的构造参数和运行参数的影响。
包括电机的功率、转数和安装参数等,以及控制模式、输出转矩和特性等仿真测试参数。
接下来,需要根据直流电机的运行特性设置ANSYS仿真的相应参数。
这包括设定模拟步骤数量,即模拟步骤之间时间间隔;定义不同参数的运动范围区间,它可以指定系统特性;时间和步长控制方式,用于控制模拟结果的精度及稳定性。
还有一些相关参数也可以设置,这些参数指定了模拟测试中直流电机的电磁特性及汽车系统参数,比如摩擦力、热力学效应、负载及驱动系统等参数,都必须考虑到。
最后,应给定模拟的终止条件,并且可以调整ANSYS仿真参数,以增强系统的表现,例如采用线性编码器、抗饱和等参数调节控制;同时可根据模拟结果,实时监控直流电机的特性,观察何种运行条件下汽车系统的性能最佳,从而确定能够有效提升系统性能的参数配置。
综上所述,ANSYS仿真设置参数的全过程可以分为四大步骤:确定模拟对象并配置实验参数;根据直流电机的运行特性设置ANSYS仿真参数;设置模拟测试的其他参数;调整ANSYS仿真参数,促进系统性能改善。
通过这些步骤,可有效地选择和调整ANSYS仿真参数,以达到模拟测试期望的结果,并为直流电机产品设计提供有力支撑。
直流电动机的仿真实验
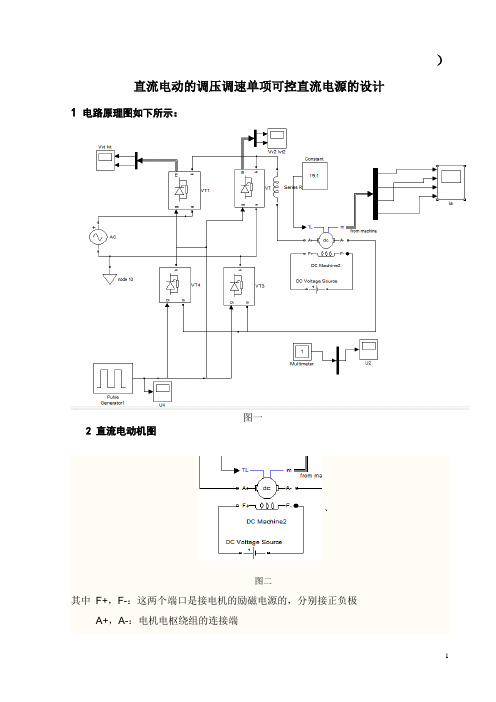
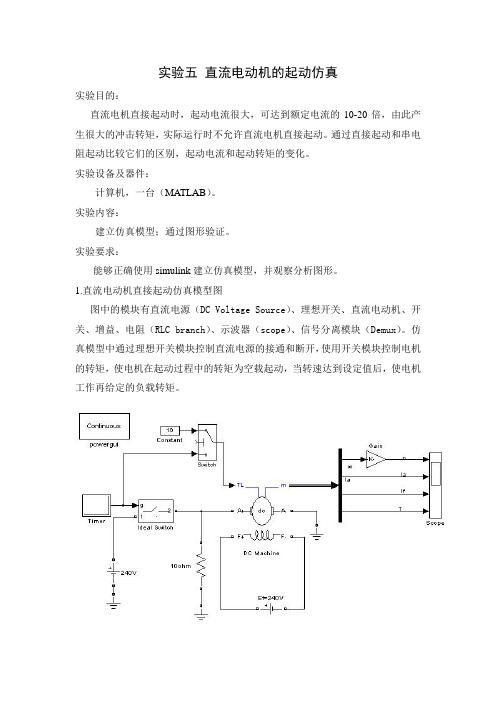
)直流电动的调压调速单项可控直流电源的设计1 电路原理图如下所示:图一2 直流电动机图、图二其中F+,F-:这两个端口是接电机的励磁电源的,分别接正负极A+,A-:电机电枢绕组的连接端TL :电机负载输入端m :测量端口,这里输出了电机转速,电枢电流,励磁电流,电磁转矩 参数计算 : 根据m.1.191500*14.3*23000*60260N N P ===T π得出TL 为19.1N.m 19375.1161.19===ΦIT CaNN T124946.0602=Φ=ΦC C TE π76.1760124946.02200==Φ=C U n E aNmin rV E n C N E419.187124946.0*1500==Φ=。
0476.372arcsin2==UEδ 电动机的设置参数如下:图三3 整流部分晶闸管最重要的特性是可控的正向导通特性.当晶闸管的阳极加上正向电压后,还必须在门极与阴极之间加上一个具有一定功率的正向触发电压才能打通, 这一正向触发电压的导通是由触发电路提供的,根据具体情况这个电压可以是交流、直流或脉冲电压。
由于晶闸管被触发导通以后,门极的触发电压即失去控制作用,所以为了减少门极的触发功率,常常用脉冲触发。
触发脉冲的宽度要能维持到晶闸管彻底导通后才能撤掉,晶闸管对触发脉冲的幅值要求是:在门极上施加的触发电压或触发电流应大于产品提出的数据,但也不能太大,以防止损坏其控制极,在有晶闸管串并联的场合,触发脉冲的前沿越陡越有利于晶闸管的同时触发导通。
为了保证晶闸管电路能正常,可靠的工作,触发电路必须满足以下要求:触发脉冲应有足够的功率,触发脉冲的电压和电流应大于晶闸管要求的数值,并留有一定的裕量。
晶闸管如下图所示:图四晶闸管的参数设定所以根据其提供的资料可取电容0.2μF ,电阻取40Ω。
4触发电路图:晶闸管额定电流It(AV)/A 1000500200100502010电容C/μF 2 1 0.5 0.25 0.2 0.15 0.1 电阻R/Ω2510204080100图五为了保证可靠触发 晶闸管触发宽度为整个20度5 平波电抗器图六为保证电流连续所需要的电感量L 可由下式求出:id i m一般取电动机额定电流的5%-10% 此处取6%H L I U 65771.006.0*16220*10*87.2223dim2===-πω6过电流保护电力电子电路运行不正常或者发生故障时,可能会发生过电流现象。
直流电动机的起动仿真
实验五直流电动机的起动仿真实验目的:直流电机直接起动时,起动电流很大,可达到额定电流的10-20倍,由此产生很大的冲击转矩,实际运行时不允许直流电机直接起动。
通过直接起动和串电阻起动比较它们的区别,起动电流和起动转矩的变化。
实验设备及器件:计算机,一台(MATLAB)。
实验内容:建立仿真模型;通过图形验证。
实验要求:能够正确使用simulink建立仿真模型,并观察分析图形。
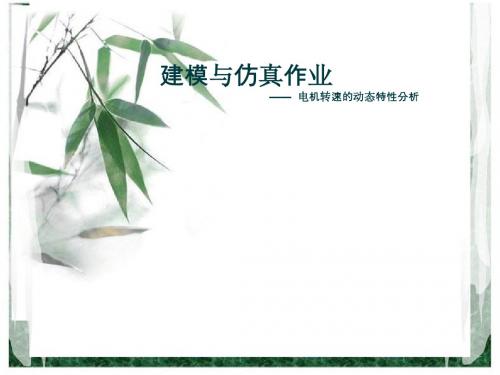
1.直流电动机直接起动仿真模型图图中的模块有直流电源(DC Voltage Source)、理想开关、直流电动机、开关、增益、电阻(RLC branch)、示波器(scope)、信号分离模块(Demux)。
仿真模型中通过理想开关模块控制直流电源的接通和断开,使用开关模块控制电机的转矩,使电机在起动过程中的转矩为空载起动,当转速达到设定值后,使电机工作再给定的负载转矩。
直流电机模块参数:直流电源模块参数:定时模块:0s时输出为0, 0.5s时输出为1理想开关:开关模块:增益模块常量模块:电阻设置:仿真时间为5s2.直流电动机电枢串电阻起动仿真与图1仿真模型相比较图中增加了电阻控制模块子模块的建立采用从Simulink中拖入子系统模块(Subsystem)的方法。
双击子模块打开在内部按下图增加所需要的模块,如增加输入、输出端口(connection port),子模块的原理图如下图所示。
子模块中有阶跃模块(Step)、断路器(Breaker)、阻抗分支(RLC branch)组成。
开关门限的设置:即转速到1400r/min时再投入负载转矩。
仿真时间为10s。
直流电机的建模与仿真
function [dx]=fx(x,nc) L=1.5; J=0.25; kr=0.4; Ri=0.2; ki=2.2; kn=0.00015; u=220; kp=4; kd=7; i=x(1); n=x(2);
x=[i,n]'; dn=(ki*i-kn*n^2)/J; du=kd*(kp*(nc-n)-dn); di=-(Ri*i+kr*n-du)/L; Uc=du; if(Uc>0) Uc=u; end if(Uc<0) Uc=0; end dx(1)=di; dx(2)=dn;
电机系统的仿真
MATLAB仿真的源程序: function dj() dt=0.02/6; x=[0;0]; y=x; t=0; nc=1000; for i=1:2000 t=[t i*dt]; xy=[y,x]; end figure plot(t,y,'LineWidth',2);
建模与仿真作业
—— 电机转速的动态特性分析
模型描述
直流电机电路图 i
电机电枢回路的电路方程是:
di U Ri i L K R n dt
反电势E
其中:U是加在电机两端的电压; Ri是电机回路的总电阻 L是电枢回路总电感 i是电枢回路电流 已知电枢回路的转动惯量是J, 开关变量由PWM波的占空比来控制
电机转速的动态仿真曲线
仿真曲线图
电机转速的动态特性总结
通过电机的状态空间数学模型以及电机的MATLAB仿真图形, 我们可以知道: 电机启动时电流迅速增大,达到最大值后又下降,当转速上 升到给定的转速时,电流值趋于稳定,不再发生变化,同时电机的 转速也达到稳定。
转速n
电机双闭环调整系统的动态结构图
无刷直流电机仿真教程
基于MATLAB/SIMULINK的无刷直流电动机系统仿真0引言无刷直流电机(Brushless DC Motor,以下简称BLDCM),是随着电力电子技术和永磁材料的发展而逐渐成熟起来的一种新型电机。
为了有效的减少控制系统的设计时间,验算各种控制算法,优化整个控制系统,有必要建立BLDCM 控制系统仿真模型。
本文在BLDCM数学模型的基础上,利用MATLAB的SIMULINK和S-FUNCTION建立BLDCM的仿真模型,并通过仿真结果验证其有效性。
1无刷直流电机仿真模型本文在MATLAB的SIMULINK的环境下,利用其丰富的模块库,在分析BLDCM数学模型的基础上,建立BLDCM控制系统仿真模型,系统结构框图如图1所示。
图1 无刷直流电机控制原理框图以图1为基础,按照模块化建模的思想搭建的系统的仿真模型如图2所示。
整个控制系统主要包括电动机本体模块、逆变器模块、电流滞环控制模块、速度控制模块等。
图2 无刷直流电机控制系统仿真模型框图1.1电动机本体模块在整个控制系统的仿真模型中,BLDCM本体模块是最重要的部分,该模块根据BLDCM电压方程求取BLDCM三相相电流,而要获得三相相电流信号i a,i b,i c必须首先求得三相反电动势信号e a,e b,e c,整个电动机本体模块的结果如下图3所示。
电机本体模块包括反动电势求取模块,中性点求取模块,转矩计算模块和位置检测模块。
图3 电机本体模块1.反电势求取模块本文直接采用了SIMULINK中的Lookup Table模块,运用分段线性化的思想,直观的实现了梯形波反电动势的模拟,具体实现如图4所示。
图4 反电势求取模块Lookup Table模块的实质是通过查表构造反电动势波形,只要把360°内的反电动势的单位波形预先输入至Lookup Table模块中,就能得到其单位理想波形,由前面的数学模型知道,反电势梯形波的幅值为:e=Ke*ω。
无刷直流电机控制系统的仿真与分析
无刷直流电机控制系统的仿真与分析一、本文概述随着科技的不断进步和电机技术的快速发展,无刷直流电机(Brushless Direct Current, BLDC)因其高效、低噪音、长寿命等优点,已广泛应用于电动汽车、无人机、家用电器等众多领域。
然而,无刷直流电机的控制系统设计复杂,涉及电子技术、控制理论、电机学等多个学科领域,因此,对其进行深入研究和仿真分析具有重要意义。
本文旨在探讨无刷直流电机控制系统的基本原理、仿真方法以及性能分析。
将简要介绍无刷直流电机的基本结构和控制原理,包括其电机本体、电子换向器、功率电子电路等关键部分。
将详细介绍无刷直流电机控制系统的仿真建模过程,包括电机模型的建立、控制算法的设计以及仿真环境的搭建。
通过对仿真结果的分析,评估无刷直流电机控制系统的性能,包括动态响应、稳态精度、效率等指标,并提出优化建议。
本文的研究不仅有助于深入理解无刷直流电机控制系统的运行机制和性能特点,还可为实际工程应用提供理论支持和指导。
通过仿真分析,可以预测和优化无刷直流电机控制系统的性能,提高系统的稳定性和可靠性,推动无刷直流电机在更多领域的应用和发展。
二、无刷直流电机控制系统基本原理无刷直流电机(Brushless DC Motor, BLDCM)是一种采用电子换向器替代传统机械换向器的直流电机。
其控制系统主要由电机本体、电子换向器(也称为功率电子电路或逆变器)以及控制器三部分组成。
无刷直流电机控制系统的基本原理,就在于如何准确地控制逆变器的开关状态,从而改变电机内部的电流流向,实现电机的连续旋转。
控制器根据电机的运行状态和用户的输入指令,生成适当的控制信号。
这些控制信号是PWM(脉宽调制)信号,用于控制逆变器的开关状态。
逆变器一般由六个功率开关管(如MOSFET或IGBT)组成,分为三组,每组两个开关管串联,然后三组并联在直流电源上。
每组开关管分别对应电机的一个相(A、B、C),通过控制每组开关管的通断,可以改变电机每相的电流大小和方向。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5.2 基于MATLAB的电机起动仿真在上节直流电机参数测试的基础上,本节作了基于MATLAB/Simulink的直流电机起动仿真研究[46-47],得到了电机起动过程中的电动机电流、电动机角速度、电枢电压和电磁转矩波形并分析了其仿真结果,为实物测试提供了简便经济的预测和验证。
5.2.1 电机起动仿真模型的建立自MATLAB从5.3版本中新增进了电力系统工具箱(Power System Blockset)发展至今,MATLAB在电力系统仿真中的应用越来越广泛。
电力系统工具箱是一个基于图形编程的电力系统仿真工具箱。
主要是由加拿大的HydroQuebec和International公司共同开发的,其功能非常强大,可以用于电路、电力电子系统、电机系统、电力传输等过程的仿真,它提供了一种类似电路建模的方式进行模型绘制,使用者不需要自己编程而只需将仿真的电力系统图搭建在工作窗口中,MATLAB自动将其变化成状态方程描述的系统形式,便可以在SIMULINK下进行仿真研究了。
图5.4 电机起动仿真模型电力系统工具箱包含的模块有:Electrical Sources(电源库)、Elements(元件库)、Power Electronics(电力电子元件库)、Machines(电机库)、Connectors (连接器库)、Measurements(测量仪器库)、Extra Library(附加元件库)、Demos (示例库)、Powergui(图形用户界面graphical user interface),在此基于MATLAB 对电机起动进行SIMULINK仿真。
搭建的电机起动仿真模型主要由直流电压源(DC V oltage Source)、理想开关(Ideal Switch)、电机起动器(Motor Starter)、直流电机(DC machine)、串联RLC支路(Series RLC Branch)、电压表(V oltage Measurement)、信号分解模块(Demux)和示波器(Scope)等模块构成。
仿真模型如图5.4所示。
仿真系统中励磁电压Ef由一个直流电压源提供,电枢绕组电动势E由另一个直流电压源经一个由计时器(Timer)控制的理想开关(Ideal Switch)提供。
采用电枢回路串电阻三级起动,电机起动器由搭建并封装的子系统(MotorStarter )模拟。
电机采用单边励磁直流电机模块(DC machine )模拟,输入端子中A+是正电枢绕组端子,F+是正磁场线圈端子,是负载转矩端子;输出端子中A-是负电枢绕组端子,F-是负磁场线圈端子,m 是仿真测量信号。
因负载转矩TL 与转速及转动角速度ω成正比,故负载转矩输入端TL 由输出信号角速度ω经过一个增益环节形成反馈环提供。
仿真测量信号m 经信号分解模块(Demux )分解为电动机角速度、电动机机电流和电磁转矩等,可在示波器中观测到其波形。
另外系统中还可观测到电枢电压信号波形。
5.2.2 仿真参数及算法的设置(1)仿真模块参数设置仿真模型中各模块参数要相互匹配,并正确初始化,才能使仿真系统得到正确的运行结果。
依据上节电机参数的测试数据,模型主要模块参数设置如下: 直流电压源(DC V oltage Source ):电动势幅值(Amplitude )(V):220理想开关(Ideal Switch ):初始状态(Initial state )(0表示“断开”,1表示“闭合”):0计时器(Timer ):转换时间(Time(s)):[0 0.5]幅值(Amplitude ):[0 1]串联RLC 支路(Series RLC Branch ):电阻(Resistance R )(ohms):1e4;电感(Inductance L )(H):0;电容(Capacitance C )(F):无穷大inf电机起动器(Motor Starter ):该子系统模拟一个三级电机起动器,由三个串联联接的串联RLC 支路(Series RLC Branch )和三个分别与串联RLC 支路并联的断路器(Breaker )构成,三个断路器的动作时间分别由阶跃响应(Step )模块控制。
设置模块参数前,必须先计算出三级起动电阻的阻值,计算如下:已知直流电动机额定电流Ie =1.2A ,额定电压Ue =220V ,上节已用直流伏安法测得电枢电阻Ra =21.29Ω。
取最大起动电流I 1为额定电流的二倍,即)(4.22.1221A I I e =⨯== (5.17)则一级起动电阻R 1为)(67.914.222011Ω===I U R e (5.18) 起动级数 m =3起动电流比λ为63.129.2167.91331===a R R λ (5.19) 故,各级起动电阻值为:)(70.3429.2163.13Ω=⨯==a R R λ (5.20))(56.5670.3463.132Ω=⨯==R R λ (5.21))(19.9156.5663.121Ω=⨯==R R λ (5.22)据此,三级起动器各模块参数设置为:串联RLC 支路1(Series RLC Branch 1):电阻(Resistance R )(ohms):91.19电感(Inductance L )(H):0;电容(Capacitance C )(F):无穷大inf串联RLC 支路2(Series RLC Branch 2):电阻(Resistance R )(ohms):56.56电感(Inductance L )(H):0;电容(Capacitance C )(F):无穷大inf串联RLC 支路3(Series RLC Branch 3):电阻(Resistance R )(ohms):34.70电感(Inductance L )(H):0;电容(Capacitance C )(F):无穷大inf阶跃响应模块(Step 1):响应时间(Step time )(s):2.8初始值(Initial value ):0终了值(Final value ):1阶跃响应模块(Step 2):响应时间(Step time )(s):4.8初始值(Initial value ):0终了值(Final value ):1阶跃响应模块(Step 3):响应时间(Step time )(s):6.8初始值(Initial value ):0终了值(Final value ):1并联的各断路器(Breaker ):断路器电阻(Breaker resistance Ron )(Ohm):0.01初始状态(Initial state )(0表示“断开”,1表示“闭合”):0直流电机(DC machine ):电枢电阻和电感(Armature resistance and inductance[Ra(ohms) La(H)]):[21.29 0.81]磁场电阻和电感(Field resistance and inductance[Rf(ohms) Lf(H)]:[220 120] 磁场电枢互感(Field-armature mutual inductance Laf(H)):1.8转动惯量(Total inertia J(kg.m^2)):0.058初始转速(Initial speed(rad/s)):1增益模块(Gain ):放大系数(Gain ):0.2287信号分解模块(Demux ):将电机输出信号m 分解,设置输出信号为电动机角速度、电动机电流和电磁转矩输出个数(Number of output ):3XY 示波器(XYscope ):X轴最小值(x-min):0;X轴最大值(x-max):40;Y轴最小值(y-min):0;Y轴最大值(y-max):140;采样时间(Sample time):-1(2)仿真参数设置仿真参数中主要设置了仿真算法页(Solver),其它页设置为默认值,仿真效果良好。
仿真时间设置为10秒(并不等同于实际时间,与选取的算法、仿真精度和计算机的运行速度等因素有关),仿真算法选用变步长ode23s,具体设置如下:仿真算法页(Solver):起始时间(Start time):0.0 停止时间(Stop time):10算法类型(Type):变步长算法(Variable-step)解法选取ode23s刚性问题解法最大步长尺寸:自动(auto)最小步长尺寸:自动(auto)初始步长尺寸:自动(auto)相对误差(Relative tolerance):1e-3(精确到小数点后三位)绝对误差(Absolute tolerance):自动(auto)输出选项(Output options):精简输出(Refine output),精简因子(Refine factor):15.2.3 仿真结果及分析在图5.4的电机起动仿真模型中经信号分解模块(Demux)分解得到的电动机角速度、电动机电流和电磁转矩信号以及电枢电压信号可在示波器中观测到其波形,如图5.5所示。
横轴为时间轴,纵轴为幅值,仿真时间为10秒。
图5.5(a)为电枢电压Va的波形,图5.5(b)为电磁转矩Te的波形,图5.5(c)为电动机角速度ω的仿真波形,图5.5(d)为电动机电流Ia的仿真波形。
(a)电枢电压波形(b)电磁转矩波形(c)电动机的角速度仿真波形(d)电动机电流仿真波形图5.5 电机起动仿真波形从图5.5(a)电动机电压波形中可看出当计时器在0到0.5秒时没有发触发脉冲给触发理想开关的控制端g,理想开关保持初始的断开状态,电机电枢的输入电压Va为初始值约1.8V;0.5秒触发理想开关的控制端后,理想开关导通,电枢输入电压立即稳定在额定值220V。
从图5.5(b)电磁转矩波形中可看出,在理想开关闭和前电磁转矩Te为0;0.5秒理想开关导通后,电磁转矩激增到稳态值的约2倍处,之后逐渐减小,在2.8秒时由阶跃响应模块控制断路器切除第一级起动电阻,电磁转矩又激增到稳态值的约1.9倍处,之后逐渐减小,在4.8秒时由阶跃响应模块控制断路器切除第二级起动电阻,电磁转矩再次激增到稳态值的约1.7倍处,之后逐渐减小,在6.8秒时由阶跃响应模块控制断路器切除第三级起动电阻,电磁转矩再次激增到稳态值的约1.4倍处,之后逐渐减小,最后稳定在稳态值处。
图5.5(c)电动机角速度仿真波形结果表明,在理想开关闭和前角速度ω为初始值1rad/s;0.5秒理想开关导通后,角速度迅速逐渐增加,在2.8秒、4.8秒、6.8秒切除各级电阻时稍有波动,最后比较平稳的运行在稳态值约124rad/s(1180r/min)处。