slo-syn步进电机参数表
丝杠步进电机产品手册

LN14H2035-15-4
1.5A/相
1.5欧+/-10% 2.0mH+/-20%
4
LS14H2035-15-4
可选丝杆导程及基本步长
screw Dia. (in) 0.250 0.250 0.250 0.250 0.250 0.250 0.250 0.250 0.250
'$7(
'(%85$1' %5($.6+$53 ('*(6
7,7/(
'21276&$/('5$:,1*
5(9,6,21
',1*6
( 0
$
$&0(/($'6&5(:
丝杆步进电机产品手册
0D[
%
2. 可选螺杆和电机搭配原则。
电机尺寸 (mm)
screw Dia. (in)
20x20 20x20
0.138 0.138
20x20 20x20
0.138 0.138
28x28 28x28
0.188 0.188
28x28 28x28
0.188 0.188
28x28 35x35/42x42
0.188 0.250
LN11H2032-05-4
0.5A/相
10欧+/-10%
LS11H2032-05-4
LN11H203欧+/-10%
LS11H2032-10-4
每相电感 39mH+/-20%
6mH+/-20%
1.5mH+/-20%
日本信浓步进电机型号及参数大全

◆ 湿度范围:20%RH-90%RH特点◆ RoHS 符合品◆ 绝缘耐压:500V AC /1分钟◆ 马达表面最高承受温度:100℃◆ 轴向容许负载:20N◆ 径向容许负载:90N(距安装面15mm)◆ 匹配驱动器:Y2SD2◆ 绝缘电阻:100MΩ◆ 法兰尺寸:□60mm◆ 安装孔距:47.14mm◆ 角度误差:±0.09°规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器A+A-B+B-棕橙红黄01020304000.20.40.60.81.01.2SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2标配连接线:长度300min力矩曲线0510152000.51.01.52.02.53.0SPEED(RPS)T O R Q U E (N .m )2524V 36V 48V 驱动器:Y2SD2接线图010********.30.60.91.21.51.8SPEED(RPS)T O R Q U E (N .m )5024V 36V 48V 驱动器:Y2SD2Y09-59D3-1305-PY09-59D3-3305-P Y09-59D3-5001-P0.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)24V 24V 24V 48V 48V 48V 60V 60V 60V 驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)驱动器:Y2SD3(并联6A)◆ 湿度范围:20%RH-90%RH◆ 绝缘耐压:1500V AC /1分钟◆ RoHS 符合品◆ 法兰尺寸:□86mm◆ 马达表面最高承受温度:100℃◆ 轴向容许负载:60N特点◆ 角度误差:±0.09°◆ 绝缘电阻:100MΩ◆ 径向容许负载:320N(距安装面20mm)◆ 匹配驱动器:Y2SD3 or Y2SA2规格型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm机械尺寸(单位mm )2g.cm 驱动器力矩曲线000555101010151515202020000T T T O O O R R R Q Q Q U U U E E E (((N N N ...m m m )))252525并联直流驱动型号步距角电流deg A/PHASE Ω/PHASE 电阻电感mH/PHASE 保持力矩 N.m 转子惯量引线数量LEAD 质量kg 马达长度mm2g.cm 驱动器串联交流驱动Y09-59D3-7430-PY09-59D3-7536-P Y09-59D3-7655-P102030400.61.2 1.81.22.43.61.83.6 5.42.44.87.23.06.09.03.67.210.8SPEED(RPS)SPEED(RPS)SPEED(RPS)50驱动器:Y2SA2(220VAC,串联3A)驱动器:Y2SA2(220VAC ,串联3A)驱动器:Y2SA2(220VAC ,串联3A)00055101015152020000T T T OO O RR R QQ Q U U U EE E (((NN N ...mm m )))2525接线图A+A-A+A-B+B-黑绿红蓝黄橙白棕并联接线串联接线Y09-59D3-7430-P Y09-59D3-7536-P Y09-59D3-7655-P。
步进电机的选用及电机型号、参数、尺寸标准

步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。
每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
而在选用功率步进电机时,首先要计算机械系统的负载转矩,电机的矩频特性能满足机械负载并有一定的余量保证其运行可靠。
在实际工作过程中,各种频率下的负载力矩必须在矩频特性曲线的范围内。
一般地说最大静力矩Mjmax大的电机,负载力矩大。
选择步进电机时,应使步距角和机械系统匹配,这样可以得到机床所需的脉冲当量。
在机械传动过程中为了使得有更小的脉冲当量,一是可以改变丝杆的导程,二是可以通过步进电机的细分驱动来完成。
但细分只能改变其分辨率,不改变其精度。
精度是由电机的固有特性所决定。
论文天地欢迎您选择功率步进电机时,应当估算机械负载的负载惯量和机床要求的启动频率,使之与步进电机的惯性频率特性相匹配还有一定的余量,使之最高速连续工作频率能满足机床快速移动的需要。
选择步进电机需要进行以下计算:(1)计算齿轮的减速比根据所要求脉冲当量,齿轮减速比i计算如下:i=(φ.S)/(360.Δ) (1-1)式中φ---步进电机的步距角(o/脉冲)S ---丝杆螺距(mm)Δ---(mm/脉冲)(2)计算工作台,丝杆以及齿轮折算至电机轴上的惯量Jt。
Jt=J1+(1/i2)[(J2+Js)+W/g(S/2π)2] (1-2)式中Jt ---折算至电机轴上的惯量(Kg.cm.s2)J1、J2 ---齿轮惯量(Kg.cm.s2)Js ----丝杆惯量(Kg.cm.s2) W---工作台重量(N)S ---丝杆螺距(cm)(3)计算电机输出的总力矩MM=Ma+Mf+Mt (1-3)Ma=(Jm+Jt).n/T× 1.02×10ˉ 2 (1-4)式中Ma ---电机启动加速力矩(N.m)Jm、Jt---电机自身惯量与负载惯量(Kg.cm.s2)n---电机所需达到的转速(r/min)T---电机升速时间(s)Mf=(u.W.s)/(2πηi)×10ˉ 2 (1-5)Mf---导轨摩擦折算至电机的转矩(N.m)u---摩擦系数η---传递效率Mt=(Pt.s)/(2πηi)×10ˉ 2 (1-6)Mt---切削力折算至电机力矩(N.m)Pt---最大切削力(N)(4)负载起动频率估算。
步进电机手册

单位 V A A mA
KHz Ώ欧母 KV,1 分钟
自然冷却;建议采用外部强制风冷
避免粉尘,油雾及腐蚀气体
-20℃~+50℃
40%~90%PH
L×W×H=105×30×65mm
约 0.34Kg
SW2
SW3
细分
ON
ON
5
●2
1
ON
OFF
10
●4
3
OFF
ON
20
●8
6
辅助模式 脉冲接口
驱动电流选择
ON 0FF 0FF 0FF 0FF SW4 ON OFF
2 2 3 4 5~6 7 8~9 10~12 13~16 17 17 17 17 17
步进电机和驱动器型号定义
Vinca motor
步进电机型号定义
57
BH
2A
41
-
14
8
法兰尺寸 电机类型 相数 电机长度
相电流 引出线数
42mm
8 出线
57mm
混合式
2相
41mm
86mm
1.4A
4 出线 6 出线
KHz Ώ欧母 KV,1 分钟
自然冷却;建议采用外部强制风冷
避免粉尘,油雾及腐蚀气体
-20℃~+50℃
40%~90%PH
L×W×H=105×30×65mm
约 0.34Kg
OFF
单脉冲:脉冲+方向
ON
双脉冲:CW 脉冲+CCW 脉冲
OFF
整步
驱动电流选择
SW6 ON OFF OFF ON ON OFF ON
型号
86BH2A65-408 86BH2A80-404 86BH2A118-308 86BH2A156-658 安装尺寸图
步进电机型号、参数、选择最新版本
则摩擦力:f = 0.1 10 9.8 = 9.8 N
惯性力: F1 = M a = 10 2.11 = 21.1 N 故:同步带上要有拉力 F = F1+ f .= 21.1+9.8= 30.9 N
3. 选择同步带直径Φ和步进电机细分数m
设同步带直径Φ=30 mm
H桥恒频斩波恒相流驱动电路原理框图 . 电流PWM细分驱动电路示意图
2. 单极性驱动
单极性驱动原理图
3. 双极性驱动
.
双极性驱动原理图
4. 微步驱动
微步驱动技术是一种电流波形控制技术。其基本思想是控制每相绕 组电流的波形,使其阶梯上升或下降,即在0和最大值之间给出多 个稳定的中间状态,定子磁场的旋转过程中也就有了多个稳定的中 间状态,对应于电机转子旋转的步数增多、步距角减小。采用细分 驱动技术可以大大提高步进电机的步矩分辨率,减小转矩波动,避 免低频共振及降低运行噪声
周长为C=3.14 Φ = 3.14 30 = 94.2 mm
核算定位精度:脉冲当量δ = C / (200 m) < 0.05;
m > C / (200 0.05)= 94.2 / (200 0.05) = 9.42
核算最大转速:nmax = Vmax/ C = 0.211 / (94.2/1000) =2.24 r/s 显然,细分数太大,最大转速太低。 但是,同步带直径也不可能小2倍,所以只能增加一级减速
步进电机及驱动器知识讲座
.
主要内容
一、步进电动机简介 二、驱动器简介 三、电机选型计算方法 四、计算例题 五、雷赛公司步进驱动器的命名方法 六、雷赛公司驱动器产品线介绍 七、电机接线 八、评判步进系统好坏的依据 九、使用过程中常见问题及原因分析 十、步进驱动系统的常见问题 (FAQ) 十一、步进电动机与交流伺服电动机的性能比较 十二、驱动器产品测试对比
步进电机技术参数说明
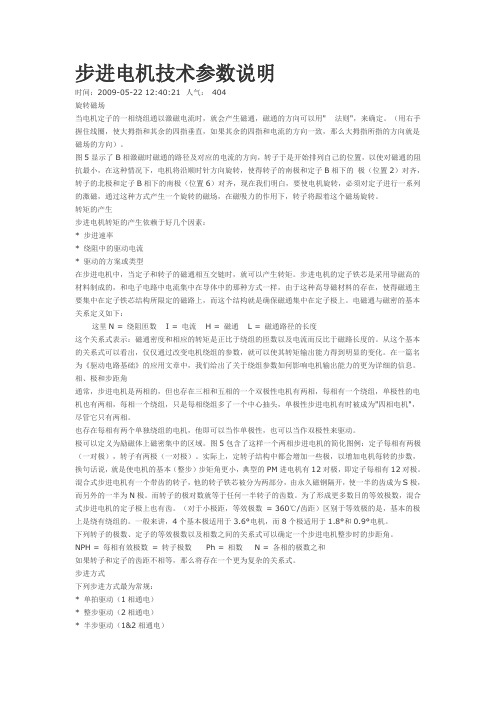
步进电机技术参数说明时间:2009-05-22 12:40:21 人气:404旋转磁场当电机定子的一相绕组通以激磁电流时,就会产生磁通,磁通的方向可以用" 法则",来确定。
(用右手握住线圈,使大拇指和其余的四指垂直,如果其余的四指和电流的方向一致,那么大拇指所指的方向就是磁场的方向)。
图5显示了B相激磁时磁通的路径及对应的电流的方向,转子于是开始排列自己的位置,以使对磁通的阻抗最小,在这种情况下,电机将沿顺时针方向旋转,使得转子的南极和定子B相下的极(位置2)对齐,转子的北极和定子B相下的南极(位置6)对齐,现在我们明白,要使电机旋转,必须对定子进行一系列的激磁,通过这种方式产生一个旋转的磁场,在磁吸力的作用下,转子将跟着这个磁场旋转。
转矩的产生步进电机转矩的产生依赖于好几个因素:* 步进速率* 绕阻中的驱动电流* 驱动的方案或类型在步进电机中,当定子和转子的磁通相互交链时,就可以产生转矩。
步进电机的定子铁芯是采用导磁高的材料制成的,和电子电路中电流集中在导体中的那种方式一样,由于这种高导磁材料的存在,使得磁通主要集中在定子铁芯结构所限定的磁路上,而这个结构就是确保磁通集中在定子极上。
电磁通与磁密的基本关系定义如下:这里N = 绕阻匝数I = 电流H = 磁通L = 磁通路径的长度这个关系式表示:磁通密度和相应的转矩是正比于绕组的匝数以及电流而反比于磁路长度的。
从这个基本的关系式可以看出,仅仅通过改变电机绕组的参数,就可以使其转矩输出能力得到明显的变化。
在一篇名为《驱动电路基础》的应用文章中,我们给出了关于绕组参数如何影响电机输出能力的更为详细的信息。
相、极和步距角通常,步进电机是两相的,但也存在三相和五相的一个双极性电机有两相,每相有一个绕组,单极性的电机也有两相,每相一个绕组,只是每相绕组多了一个中心抽头,单极性步进电机有时被成为"四相电机",尽管它只有两相。
步进电机驱动器数据手册

步进电机驱动器数据手册引言:步进电机驱动器是一种广泛应用于自动化领域的关键设备。
本手册旨在提供关于步进电机驱动器的详细信息,包括工作原理、技术规格和使用指南,以帮助用户更好地了解和应用步进电机驱动器。
一、概述步进电机驱动器是一种电子设备,用于控制和驱动步进电机的运动。
它将电流和电压转换为步进电机能够理解和执行的命令信号,从而实现精确的位置控制和运动控制。
二、工作原理步进电机驱动器通过控制电流的大小和频率来控制步进电机的运动。
它接收来自控制器的指令信号,并将其转换为适合步进电机的驱动信号。
步进电机驱动器通过逐步激励步进电机的不同相位,从而实现步进电机的旋转。
三、技术规格1. 输入电压范围:步进电机驱动器通常支持多种输入电压范围,根据实际需要进行选择。
2. 输出电流范围:步进电机驱动器的输出电流决定了步进电机的扭矩和运动能力。
用户需要根据步进电机的额定电流选择合适的驱动器。
3. 步进分辨率:步进电机驱动器的步进分辨率决定了步进电机每个步进的精确度。
更高的步进分辨率可以实现更精确的位置和运动控制。
4. 脉冲频率:步进电机驱动器的脉冲频率决定了步进电机的最大速度和加速度。
更高的脉冲频率可以实现更快的运动速度。
5. 保护功能:步进电机驱动器通常具有过流保护、过热保护和过压保护等功能,以保护驱动器和步进电机的安全运行。
四、使用指南1. 安装步进电机驱动器:在安装步进电机驱动器之前,请确保将电源关闭,并遵循驱动器制造商提供的安装指南。
2. 连接步进电机和驱动器:首先,将步进电机的细线(通常是4根或8根)连接到驱动器的输出端口。
然后,将驱动器的输入端口连接到控制器或步进电机控制系统。
3. 配置驱动器参数:根据实际应用需求,使用驱动器提供的配置工具或按键面板,配置驱动器的参数,如输入电压范围、输出电流范围、步进分辨率等。
4. 编写控制程序:使用编程语言或控制软件,编写控制程序来控制步进电机的运动。
在编写控制程序时,需要了解控制器和驱动器的通信协议和命令格式。
步进参数
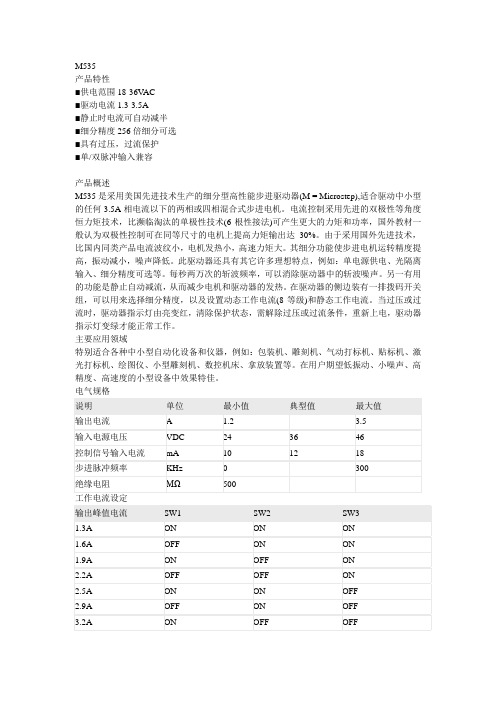
M535产品特性■供电范围18-36V AC■驱动电流1.3-3.5A■静止时电流可自动减半■细分精度256倍细分可选■具有过压,过流保护■单/双脉冲输入兼容产品概述M535是采用美国先进技术生产的细分型高性能步进驱动器(M = Microstep),适合驱动中小型的任何3.5A相电流以下的两相或四相混合式步进电机。
电流控制采用先进的双极性等角度恒力矩技术,比濒临淘汰的单极性技术(6根性接法)可产生更大的力矩和功率,国外教材一般认为双极性控制可在同等尺寸的电机上提高力矩输出达30%。
由于采用国外先进技术,比国内同类产品电流波纹小,电机发热小,高速力矩大。
其细分功能使步进电机运转精度提高,振动减小,噪声降低。
此驱动器还具有其它许多理想特点,例如:单电源供电、光隔离输入、细分精度可选等。
每秒两万次的斩波频率,可以消除驱动器中的斩波噪声。
另一有用的功能是静止自动减流,从而减少电机和驱动器的发热。
在驱动器的侧边装有一排拨码开关组,可以用来选择细分精度,以及设置动态工作电流(8等级)和静态工作电流。
当过压或过流时,驱动器指示灯由亮变红,清除保护状态,需解除过压或过流条件,重新上电,驱动器指示灯变绿才能正常工作。
主要应用领域特别适合各种中小型自动化设备和仪器,例如:包装机、雕刻机、气动打标机、贴标机、激光打标机、绘图仪、小型雕刻机、数控机床、拿放装置等。
在用户期望低振动、小噪声、高精度、高速度的小型设备中效果特佳。
电气规格工作电流设定微步细分设定接口信号描述典型接线图安装尺寸四、接线信号功能详解七、机械安装尺寸(132×76×45mm)十、细分和电流设定M535驱动器采用八位拨码开关设定细分精度、动态电流和半流/全流。
详细描述如下:动态电流细分精度半流/全流细分设定细分精度由5、6、7、8四位开关设定。
电流设定1—3位拨码开关用于设定电机运动时电流(动态电流),而第4位拨码开关用于设定静止时电流(静态电流)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Standard 60mm Frame Size (NEMA Size 23) Features?/SPAN> Up to 150% rated torque reservecapacity?/SPAN> ?3% typical step accuracy?/SPAN> Standard terminal box, encoders,and precision gearheads available?/SPAN> Available with four, six or eightleads?/SPAN> Customized configurationsavailablePerformance EnvelopeMoto r Fra me MinimumHoldingTorqueRotorInertiaWeight MaximumShaftLoadMinimum Residual TorqueUnipolar20onoz-in(Ncm)Bipolar 20onoz-in(Ncm)oz-in-s(kg-cm )Net*lb(kg)Ship*lb(kg)Overhanglb(kg)Thrustlb(kg)oz-in (Ncm)M06 1M06 260(42)10(775(53)125(88)0.0017(0.12)0.0034(0.24)1.3(0.57)2.0(0.91)1.5(0.68)2.5(1.1)15(6.8)15(6.8)25(11)1.0 (0.71)1.4 (0.99)1)25(11)Motor Type 3% Accur acy ConnectionsTypicalTimeforSingleStep(mS)(1)Unipolar Configuration Bipolar ConnectionsNumberTypeNominalDCVolts(3)RatedAmperesPerWindingNominalResistancePerWinding(25C)OHMS(2)NominalInductancePerPhase(Milli-Henry's)(2)(4)MinimumHoldingTorqueOz-In(Ncm)SeriesConnectionParallelConnection2On1OnVoltsAmperesR L MinimumHoldingTorqueOz-In(Ncm)VoltsAmperesR L MinimumHoldingTorqueOz-In(Ncm )2 O n 1On2On1OnM061-CE02 M061-LE02 M061-CS02 M061-LS02 M061-CE08 M061-LE08 M061-CS08 M061-LS08 M061-FF-20 6M061-CS-30 1*M061-LS-30 1*M061-CS-30 2*M061-LS-30 2*M061-CS-31 1*M061-LS-31886688664666666446666886688668844488CONN.LEADSCONN.LEADSCONN.LEADSCONN.L2.52.52.52.52222?7.57.54.24.21212??355551.251.251.251.25?BR>11115.55.52020?BR>?5.35.34.24.24.24.11113.83.83.83.8?BR>0.440.440.880.880.220.22??1.61.61.91.955550.330.330.330.33?BR>22.522.56.26.29191??BR>3.33.32.22.22.22.20.880.880.889.579.579.579.570.6350.6350.6350.635?BR>38.438.49.579.57126126?BR>?BR>8.288.285.895.895.895.8922220.80.80.80.8?BR>60(42)60(42)60(42)60(42)60(42)60(42)60(42)60(42)?BR>53(37)53(37)53(37)5336(25)36(25)36(25)36(25)36(25)36(25)36(25)36(25)?BR>32(23)32(23)32(23)3277771.81.81.81.86.315.615..7.7.7.72.72.72.72.71.1111.66.66.66.666.338.338.338.338.32.542.542.54275(53)75(53)75(53)75(53)75(53)75(53)45(32)45(32)45(32)45(32)45(32)45(32)1*M061-CF-40 8M061-LR-40 8M062-CS03 M062-LS03 M062-CS04 M062-LS04 M062-CE04 M062-LE04 M062-CS06 M062-LS06 M062-CE06 M062-LE06 M062-CS09 M062-LS09 M062-CE09 M062-LE09 M062-FF-20 6M062-CF-40 1M062-LF-40 1 668866444EADSLEADSCONN.LEADSCONN.LEADSCONN.LEADSCONN..53.52.82.82.82.8?BR>??BR>?2.22.22.22.2???2.22.62.62.62.61.651.651.651.65???BR>3.363.363.363.362.252.252.252.25?BR>??/TD>1.91.93.13.13.13.14.74.74.74.7???2.92.92.92.94.64.64.64.6??BR>?/TD0.880.350.350.350.35?BR>?BR>?BR>1.161.161.161.160.490.490.490.49?BR>?BR>?/TD>?BR>?BR>2.852.852.852.851.151.151.151.15?BR>?BR>?/TD>(37)47(33)47(33)?BR>?BR>100(71)10(71)10(71)10(71)10(71)10(71)10(71)10(71)(23)28(20)28(20)?BR>?BR>60(42)60(42)60(42)60(42)60(42)60(42)60(42)60(42)60(42)60(42)60(467.77.728.328.3887.57.55.95.95.93.3.6.6.16.16.5.51.131.131.454512.412.418218215.915.96.66.64..5424.815415438.338.35454616133.75(53)75(53)75(53)65(46)65(46)65(46)65(46)5845(32)45(32)?BR>39(28)39(28)39(28)39(28)35(2M063-CE06 M063-LE06 M063-CS06 M063-LS06 M063-CE09 M063-LE09 M063-CS09 M063-LS09 M063-FF-20 6M063-CF-40 1M063-LF-40 1 LEADSCONN.LEADSCONN.LEADSCONN.LEADSCONN.LEAD62.62.62.62.42.42.42.4?BR>??/TD>> 10(71)10(71)10(71)10(71)10(71)10(71)?BR>?BR>?BR>150(106)150(106)150(106)150(2)60(42)60(42)60(42)?BR>?BR>?BR>90(64)90(64)90(64)90(64)90(64)90(64)90(64)90(64)?BR>?BR>5.93.93.93.93.92.32.32.32.34.26.6341.341.341.342.22.22.22.23.33.33.44.44.44.41.761.761.761.76.7.7.1233.1223.5623.5623.5623.5688883.2(41)58(41)75(53)75(53)125(88)125(88)125(88)15)35(25)45(32)45(32)75(53)75(53)75(53)75(53)S C O N N . L E A D S C O N N . L E A D S C O N N . L E A D S L E A D S C O N N . L E A 106)150(106)150(106)150(106)150(106)?BR>?BR>?/TD>?/TD>6.64.94.94.94.93.23.23.23.25.45.6633.31.5112.12.12.12.13.253.253.257.72.86.66.62.322.322.322.32.983.23.23.212.5333311.411.411.411.425(88)125(88)125(88)125(88)125(88)125(88)12575(53)75(53)75(53)75(53)75(53)75(53)75(53)75DS C O N N . L E A D S C O N N . L E A D C O N N . L E A D S C O N N . L E A D S L E A 5.663.251.511.98.98.983.65.665.664.64.64.64.614.52929(88)125(88)125(88)125(88)125(88)125(88)125(8(53)75(53)75(53)?BR>75(53)75(53)115(81)115(8D S C O N N . LE A D S 8)125(88)19(134)19(134)19(134)19(134)191)115(81)115(81)115(81)115(81)115(81)115(81)134) 190 (134) 190 (134) 190 (134) 190 (134) 160 (113B R >96 (68) 96 (68)。