用matlab实现最小二乘递推算法辨识系统参数
matlab基于最小二乘、全局化算法、遗传算法的参数识别

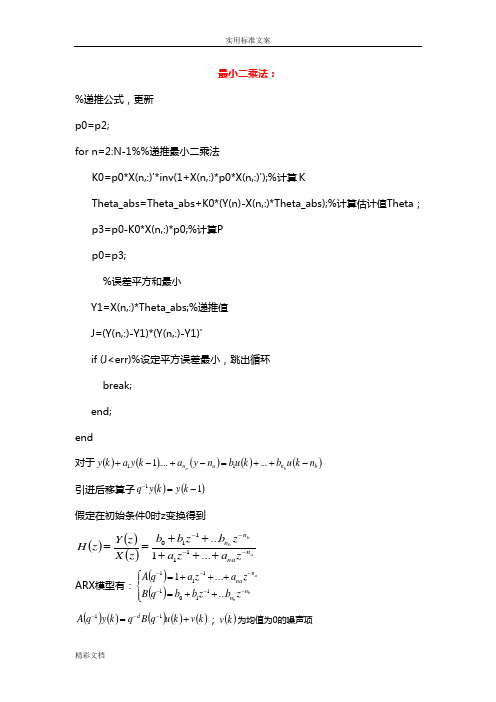
最小二乘法:%递推公式,更新 p0=p2;for n=2:N-1%%递推最小二乘法K0=p0*X(n,:)'*inv(1+X(n,:)*p0*X(n,:)');%计算KTheta_abs=Theta_abs+K0*(Y(n)-X(n,:)*Theta_abs);%计算估计值Theta ;p3=p0-K0*X(n,:)*p0;%计算P p0=p3;%误差平方和最小 Y1=X(n,:)*Theta_abs;%递推值 J=(Y(n,:)-Y1)*(Y(n,:)-Y1)'if (J<err)%设定平方误差最小,跳出循环 break; end; end对于()()()()()b n a n n k u b k u b n y a k y a k y b a -++=-+-+.......111 引进后移算子()()11-=-k y k y q 假定在初始条件0时z 变换得到()()()ab b n a n n n z a z a z b z b b z X z Y z H ----+++++==...1 (11110)ARX 模型有:()()⎪⎩⎪⎨⎧++=+++=------b b a n n n a n zb z b b q B za z a q A (11)101111 ()()()()()k v k u q B q k y q A d +=---11;()k v 为均值为0的噪声项 上式可以改写为()()()()l k k v i k u b i k z a k z ban i i n i i ,..,2,1,11=+-+--=∑∑==上式改写为最小二乘格式()())(k v k h k z T +=θ(3) 对于(3)式的l次观测构成一个线性方程组[][]⎪⎩⎪⎨⎧=------=Tn n Tba na b b b a a a n k u k u n k z k z k h ,...,,,,...,,)(),...,1(),(),...,1()(2121θ即 l l l V H Z +=θ.()()()[]()()()[]Tl Tl l v v v V l z z z Z ,...2,1,,...,2,1=()()()()()()()()()⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-------------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()1()(21)2()1(10)1(021b a b a b a l n l u l u n l z l z n u u n z z n u u n z z l h h h H取极小化准则函数()()[]()()θθθL T L l lk T H z H z k h k z J --=-=∑=12,极小化()θJ ,求得参数θ的估计值θˆ,[]T n n na b b b a a a ˆ,...,ˆ,ˆ,ˆ,...,ˆ,ˆˆ2121=θ ()()[]()()θθθˆˆˆ12ll T l l lk T H Z H Z k h k z J --=-=∑=表示为了确定使准则最小的条件,将该式对各参数求导,并令其结果等于零:()()l T l lT l l l l Z H H H H Z H J 1ˆ,0ˆ2ˆ-==--=∂∂θθθ即,只要矩阵l H 是满秩的,l Tl H H 则是正定的,使准则为极小的条件得到满足,最小二乘估计的递推算法(RLS )最小二乘法,不仅占用大量内存,而且不适合于在线辨识,为了解决这个问题,把它转化为递推算法:修正项+=+kk θθˆˆ1 ()()()()()()()()()⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-------------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()1()(21)2()1(10)1(021b a b a b a l n l u l u n l z l z n u u n z z n u u n z z l h h h H若令()1-=l T l l H H P ,则[][]l T l l T l l l l l T l l l P h Ph h I h P P h h P P 111111111+-+++-++++-=+=[][]lT l l l l l Tl l l l l T l l l l l P h K I P h P h h P K h z K 111111111111;1;ˆˆ++++++++++++-=+=-+=θθθ加权递推最小二乘(RWLS ):()()()()(),11k e k u z B k z z A +=--()()()(),11k v zC zD k e --=e(k)为有色噪声,v(k)为白噪声。
系统全参数辨识 matlab 实现

实用标准文案4. 设某物理量Y 与X 满足关系式Y=aX 2+bX+c ,实验获得一批数据如下表,试辨识模型参数a ,b 和c 。
(50分)报告要求:要有问题描述、参数估计原理、程序流程图、程序清单,最后给出结果及分析。
(1)问题描述:由题意知,这是一个已知模型为Y=aX 2+bX+c ,给出了10组实验输入输出数据,要求对模型参数a ,b ,c 进行辨识。
这里对该模型参数辨识采用递推最小二乘法。
(2)参数估计原理对该模型参数辨识采用递推最小二乘法,即RLS ( recurisive least square ),它是一种能够对模型参数进行在线实时估计的辨识方法。
其基本思想可以概括为:新的估计值)(ˆk θ=旧的估计值)1(ˆ-k θ+修正项 下面将批处理最小二乘法改写为递推形式即递推最小二乘参数估计的计算方法。
批处理最小二乘估计θˆ为Y T TΦΦΦ=-1)(ˆθ,设k 时刻的批处理最小二乘估计为:k T k k T k Y ΦΦΦ=-1)(ˆθ令111)]1()()1([)()(----+-=ΦΦ=k k k P k P T kT k ϕϕ K 时刻的最小二乘估计可以表示为k T k Y k P k Φ=)()(ˆθ=)]()()[(11k y k Y k P k T k ϕ+Φ-- =)]1(ˆ)()()[()1(ˆ--+-k k k y k K k Tθϕθ;式中)()()(k k P k K ϕ=,因为要推导出P(k)和K(k)的递推方程,因此这里介绍一下矩阵求逆引理:设A 、(A+BC )和(I +B CA 1-)均为非奇异方阵,则111111)()(------+-=+CA B CA I B A A BC A 通过运用矩(3)程序流程图(如右图1所示)递推最小二乘法(RLS)步骤如下:已知:n、b n和d。
aStep 1 :设置初值)0(ˆθ和P(0),输入初始数据;Step2 :采样当前输出y(k)、和输入u(k)Step3 :利用上面式①②③计算)(k K、)(ˆkθ和)(k P;Step4 :k→k+1,返回step2,继续循环。
广义最小二乘

递推的最小二乘辨识程序matlab 2007-07-11 14:21:39 阅读116 评论0字号:大中小%递推的最小二乘辨识程序clear allL=15;u=wgn(1,L,1);v=wgn(1,15,1);z(2)=0;z(1)=0;%取z的前两个初始值为零for k=3:15;z(k)=1.5*z(k-1)-0.7*z(k-2)+u(k-1)+0.5*u(k-2);%给出理想的辨识输出采样信号end%RLS递推最小二乘辨识c0=[0.001 0.001 0.001 0.001]'; %直接给出被辨识参数的初始值,即一个充分小的实向量p0=10^6*eye(4,4); %直接给出初始状态P0,即一个充分大的实数单位矩阵E=0.000000005;%相对误差E=0.000000005c=[c0,zeros(4,14)];%被辨识参数矩阵的初始值及大小e=zeros(4,15);%相对误差的初始值及大小for k=3:15; %开始求Kh1=[-z(k-1),-z(k-2),u(k-1),u(k-2)]'; x=h1'*p0*h1+1; x1=inv(x); %开始求K(k)k1=p0*h1*x1;%求出K的值d1=z(k)-h1'*c0; c1=c0+k1*d1;%求被辨识参数ce1=c1-c0;%求参数当前值与上一次的值的差值e2=e1./c0;%求参数的相对变化e(:,k)=e2; %把当前相对变化的列向量加入误差矩阵的最后一列c0=c1;%新获得的参数作为下一次递推的旧参数c(:,k)=c1;%把辨识参数c 列向量加入辨识参数矩阵的最后一列p1=p0-k1*k1'*[h1'*p0*h1+1];%求出p(k)的值p0=p1;%给下次用if e2<=E break;%若参数收敛满足要求,终止计算end%小循环结束end%大循环结束a1=c(1,:); a2=c(2,:); b1=c(3,:); b2=c(4,:); ea1=e(1,:); ea2=e(2,:); eb1=e(3,:); eb2=e(4,:);figure(1);%第2个图形i=1:15;%横坐标从1到15plot(i,a1,'r',i,a2,':',i,b1,'g',i,b2,':') %画出a1,a2,b1,b2的各次辨识结果figure(2); %第3个图形i=1:15; %横坐标从1到15plot(i,ea1,'r',i,ea2,'g',i,eb1,'b',i,eb2,'r:') %画出a1,a2,b1,b2的各次辨识结果的收敛情况广义最小二乘辨识的matlab实现(2007-07-05 01:35:37)转载最近在做系统辨识的工作,经典的方法林林种种,最小二乘诸法最是好用。
利用Matlab进行系统辨识的技术方法

利用Matlab进行系统辨识的技术方法在Matlab中进行系统辨识的技术方法主要有参数估计法和非参数估计法两种。
1.参数估计法:参数估计法是通过拟合已知输入和输出数据的数学模型来估计系统的参数。
常用的参数估计方法包括最小二乘法(OLS)、最小二乘法(LSE)、最小二乘法(MLE)和极大似然估计法(MLE)等。
a) 最小二乘法(OLS):OLS方法通过最小化实际输出与模型预测输出之间的误差平方和来估计系统参数。
在Matlab中,可以使用lsqcurvefit函数来实现最小二乘法的系统辨识。
b) 最小二乘法(LSE):LSE方法是通过最小化实际输出与模型预测输出之间的误差平方和来估计系统参数。
在Matlab中,可以使用lsqnonlin函数来实现最小二乘法的系统辨识。
c) 最小二乘法(MLE):MLE方法是通过最大化似然函数来估计系统参数。
在Matlab中,可以使用mle函数来实现最大似然估计法的系统辨识。
2.非参数估计法:非参数估计法不需要事先指定系统的数学模型,而是直接根据输入和输出数据的统计特性进行系统辨识。
常用的非参数估计方法包括频域方法、时域方法和时频域方法等。
a) 频域方法:频域方法通过对输入和输出数据进行频谱分析来估计系统的频率响应。
常用的频域方法包括傅里叶变换、功率谱密度估计和频率响应函数估计等。
在Matlab中,可以使用fft函数和pwelch函数来实现频域方法的系统辨识。
b) 时域方法:时域方法通过对输入和输出数据进行时间序列分析来估计系统的时域特性。
常用的时域方法包括自相关函数估计和互相关函数估计等。
在Matlab中,可以使用xcorr函数来实现时域方法的系统辨识。
c) 时频域方法:时频域方法结合了频域方法和时域方法的优势,可以同时估计系统的频率响应和时域特性。
常用的时频域方法包括短时傅里叶变换和小波变换等。
在Matlab中,可以使用spectrogram函数和cwt函数来实现时频域方法的系统辨识。
Matlab最小二乘系统辨识
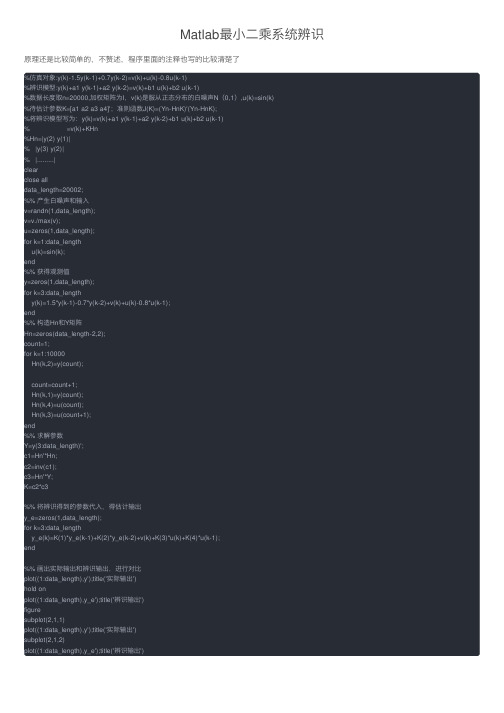
Matlab最⼩⼆乘系统辨识原理还是⽐较简单的,不赘述,程序⾥⾯的注释也写的⽐较清楚了%仿真对象:y(k)-1.5y(k-1)+0.7y(k-2)=v(k)+u(k)-0.8u(k-1)%辨识模型:y(k)+a1 y(k-1)+a2 y(k-2)=v(k)+b1 u(k)+b2 u(k-1)%数据长度取n=20000,加权矩阵为I,v(k)是服从正态分布的⽩噪声N(0,1),u(k)=sin(k)%待估计参数K=[a1 a2 a3 a4]';准则函数J(K)=(Yn-HnK)'(Yn-HnK);%将辨识模型写为:y(k)=v(k)+a1 y(k-1)+a2 y(k-2)+b1 u(k)+b2 u(k-1)% =v(k)+KHn%Hn=|y(2) y(1)|% |y(3) y(2)|% |.........|clearclose alldata_length=20002;%% 产⽣⽩噪声和输⼊v=randn(1,data_length);v=v./max(v);u=zeros(1,data_length);for k=1:data_lengthu(k)=sin(k);end%% 获得观测值y=zeros(1,data_length);for k=3:data_lengthy(k)=1.5*y(k-1)-0.7*y(k-2)+v(k)+u(k)-0.8*u(k-1);end%% 构造Hn和Y矩阵Hn=zeros(data_length-2,2);count=1;for k=1:10000Hn(k,2)=y(count);count=count+1;Hn(k,1)=y(count);Hn(k,4)=u(count);Hn(k,3)=u(count+1);end%% 求解参数Y=y(3:data_length)';c1=Hn'*Hn;c2=inv(c1);c3=Hn'*Y;K=c2*c3%% 将辨识得到的参数代⼊,得估计输出y_e=zeros(1,data_length);for k=3:data_lengthy_e(k)=K(1)*y_e(k-1)+K(2)*y_e(k-2)+v(k)+K(3)*u(k)+K(4)*u(k-1);end%% 画出实际输出和辨识输出,进⾏对⽐plot((1:data_length),y');title('实际输出')hold onplot((1:data_length),y_e');title('辨识输出')figuresubplot(2,1,1)plot((1:data_length),y');title('实际输出')subplot(2,1,2)plot((1:data_length),y_e');title('辨识输出')。
系统辨识最小二乘参数估计matlab
最小二乘参数估计摘要:最小二乘的一次性完成辨识算法(也称批处理算法),他的特点是直接利用已经获得的所有(一批)观测数据进行运算处理。
这种算法在使用时,占用内存大,离线辨识,观测被辨识对象获得的新数据往往是逐次补充到观测数据集合中去的。
在应用一次完成算法时,如果要求在每次新增观测数据后,接着就估计出系统模型的参数,则需要每次新增数据后要重新求解矩阵方程()Z l T l l Tl ΦΦΦ-∧=1θ。
最小二乘辩识方法在系统辩识领域中先应用上已相当普及,方法上相当完善,可以有效的用于系统的状态估计,参数估计以及自适应控制及其他方面。
关键词:最小二乘(Least-squares ),系统辨识(System Identification ) 目录:1.目的 (1)2.设备 (1)3引言 (1)3.1 课题背景 (1)4数学模型的结构辨识 (2)5 程序 (3)5.1 M 序列子函数 ................................................................................... 错误!未定义书签。
5.2主程序................................................................................................. 错误!未定义书签。
6实验结果: ................................................................................................................................... 3 7参考文献: ................................................................................................... 错误!未定义书签。
matlab基于最小二乘、全局化算法、遗传算法的参数识别
最小二乘法:%递推公式,更新 p0=p2;for n=2:N-1%%递推最小二乘法K0=p0*X(n,:)'*inv(1+X(n,:)*p0*X(n,:)');%计算KTheta_abs=Theta_abs+K0*(Y(n)-X(n,:)*Theta_abs);%计算估计值Theta ;p3=p0-K0*X(n,:)*p0;%计算P p0=p3;%误差平方和最小 Y1=X(n,:)*Theta_abs;%递推值 J=(Y(n,:)-Y1)*(Y(n,:)-Y1)'if (J<err)%设定平方误差最小,跳出循环 break; end; end对于()()()()()b n a n n k u b k u b n y a k y a k y b a -++=-+-+.......111 引进后移算子()()11-=-k y k y q 假定在初始条件0时z 变换得到()()()ab b n a n n n z a z a z b z b b z X z Y z H ----+++++==...1 (11110)ARX 模型有:()()⎪⎩⎪⎨⎧++=+++=------b b a n n n a n zb z b b q B za z a q A (11)101111 ()()()()()k v k u q B q k y q A d +=---11;()k v 为均值为0的噪声项 上式可以改写为()()()()l k k v i k u b i k z a k z ban i i n i i ,..,2,1,11=+-+--=∑∑==上式改写为最小二乘格式()())(k v k h k z T +=θ(3) 对于(3)式的l次观测构成一个线性方程组[][]⎪⎩⎪⎨⎧=------=Tn n Tba na b b b a a a n k u k u n k z k z k h ,...,,,,...,,)(),...,1(),(),...,1()(2121θ即 l l l V H Z +=θ.()()()[]()()()[]Tl Tl l v v v V l z z z Z ,...2,1,,...,2,1=()()()()()()()()()⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-------------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()1()(21)2()1(10)1(021b a b a b a l n l u l u n l z l z n u u n z z n u u n z z l h h h H取极小化准则函数()()[]()()θθθL T L l lk T H z H z k h k z J --=-=∑=12,极小化()θJ ,求得参数θ的估计值θˆ,[]T n n na b b b a a a ˆ,...,ˆ,ˆ,ˆ,...,ˆ,ˆˆ2121=θ ()()[]()()θθθˆˆˆ12ll T l l lk T H Z H Z k h k z J --=-=∑=表示为了确定使准则最小的条件,将该式对各参数求导,并令其结果等于零:()()l T l lT l l l l Z H H H H Z H J 1ˆ,0ˆ2ˆ-==--=∂∂θθθ即,只要矩阵l H 是满秩的,l Tl H H 则是正定的,使准则为极小的条件得到满足,最小二乘估计的递推算法(RLS )最小二乘法,不仅占用大量内存,而且不适合于在线辨识,为了解决这个问题,把它转化为递推算法:修正项+=+kk θθˆˆ1 ()()()()()()()()()⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-------------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()1()(21)2()1(10)1(021b a b a b a l n l u l u n l z l z n u u n z z n u u n z z l h h h H若令()1-=l T l l H H P ,则[][]l T l l T l l l l l T l l l P h Ph h I h P P h h P P 111111111+-+++-++++-=+=[][]lT l l l l l Tl l l l l T l l l l l P h K I P h P h h P K h z K 111111111111;1;ˆˆ++++++++++++-=+=-+=θθθ加权递推最小二乘(RWLS ):()()()()(),11k e k u z B k z z A +=--()()()(),11k v zC zD k e --=e(k)为有色噪声,v(k)为白噪声。
matlab基于某最小二乘、全局化算法、遗传算法地全参数识别
最小二乘法:%递推公式,更新 p0=p2;for n=2:N-1%%递推最小二乘法K0=p0*X(n,:)'*inv(1+X(n,:)*p0*X(n,:)');%计算KTheta_abs=Theta_abs+K0*(Y(n)-X(n,:)*Theta_abs);%计算估计值Theta ; p3=p0-K0*X(n,:)*p0;%计算P p0=p3;%误差平方和最小Y1=X(n,:)*Theta_abs;%递推值 J=(Y(n,:)-Y1)*(Y(n,:)-Y1)'if (J<err)%设定平方误差最小,跳出循环 break; end; end对于()()()()()b n a n n k u b k u b n y a k y a k y b a -++=-+-+.......111 引进后移算子()()11-=-k y k y q 假定在初始条件0时z 变换得到()()()ab b n a n n n z a z a z b z b b z X z Y z H ----+++++==...1 (11110)ARX 模型有:()()⎪⎩⎪⎨⎧++=+++=------b b a n n n a n zb z b b q B za z a q A (11)101111 ()()()()()k v k u q B q k y q A d +=---11;()k v 为均值为0的噪声项上式可以改写为()()()()l k k v i k u b i k z a k z ban i i n i i ,..,2,1,11=+-+--=∑∑==上式改写为最小二乘格式()())(k v k h k z T +=θ(3) 对于(3)式的l次观测构成一个线性方程组[][]⎪⎩⎪⎨⎧=------=Tn n Tba na b b b a a a n k u k u n k z k z k h ,...,,,,...,,)(),...,1(),(),...,1()(2121θ即 l l l V H Z +=θ.()()()[]()()()[]T l T l l v v v V l z z z Z ,...2,1,,...,2,1=()()()()()()()()()⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-------------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()1()(21)2()1(10)1(021b a b a b a l n l u l u n l z l z n u u n z z n u u n z z l h h h H K K K K K K M 取极小化准则函数()()[]()()θθθL T L l lk T H z H z k h k z J --=-=∑=12,极小化()θJ ,求得参数θ的估计值θˆ,[]T n n na b b b a a a ˆ,...,ˆ,ˆ,ˆ,...,ˆ,ˆˆ2121=θ ()()[]()()θθθˆˆˆ12ll T l l lk T H Z H Z k h k z J --=-=∑=表示为了确定使准则最小的条件,将该式对各参数求导,并令其结果等于零:()()l T l lT l l l l Z H H H H Z H J 1ˆ,0ˆ2ˆ-==--=∂∂θθθ即,只要矩阵l H 是满秩的,l Tl H H 则是正定的,使准则为极小的条件得到满足,最小二乘估计的递推算法(RLS )最小二乘法,不仅占用大量内存,而且不适合于在线辨识,为了解决这个问题,把它转化为递推算法:修正项+=+kk θθˆˆ1 ()()()()()()()()()⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡-------------=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=)()1()(21)2()1(10)1(021b a b a b a l n l u l u n l z l z n u u n z z n u u n z z l h h h H K K K K K K M若令()1-=l T l l H H P ,则[][]l T l l T l l l l l T l l l P h Ph h I h P P h h P P 111111111+-+++-++++-=+=[][]lT l l l l l T l l l l l T l l l l l P h K I P h P h h P K h z K 111111111111;1;ˆˆ++++++++++++-=+=-+=θθθ加权递推最小二乘(RWLS ):()()()()(),11k e k u z B k z z A +=--()()()(),11k v zC zD k e --=e(k)为有色噪声,v(k)为白噪声。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动化专业综合设计报告
设计题目:最小二乘递推算法辨识系统参数所在实验室:自动化系统仿真实验室
指导教师:
学生姓名
班级计082-2 班
学号
撰写时间:2012-3-1 成绩评定:
一.设计目的
1、学会用Matlab实现最小二乘法辨识系统参数。
2、进一步熟悉Matlab的界面及基本操作;
3、了解并掌握Matlab中一些函数的作用与使用;
二.设计要求
最小二乘递推算法辨识系统参数,利用matlab编程实现,设初始参数为零。
z(k)-1.5*z(k-1)+0.7*z(k-2)=1*u(k-1)+0.5*u(k-2)+v(k);
选择如下形式的辨识模型:
z(k)+a1*z(k-1)+a2*z(k-2)=b1*u(k-1)+b2*u(k-2)+v(k);
三.实验程序
m= 3;
N=100;
uk=rand(1,N);
for i=1:N
uk(i)=uk(i)*(-1)^(i-1);
end
yk=zeros(1,N);
for k=3:N
yk(k)=1.5*yk(k-1)-0.7*yk(k-2)+uk(k-1)+0.5*uk(k-2);
end
%j=100;kn=0;
%y=yk(m:j)';
%psi=[yk(m-1:j-1);yk(m-2:j-2);uk(m-1:j-1);uk(m-2:j-2)]';
%pn=inv(psi'*psi);
%theta=(inv(psi'*psi)*psi'*y);
theta=[0;0;0;0];
pn=10^6*eye(4);
for t=3:N
ps=([yk(t-1);yk(t-2);uk(t-1);uk(t-2)]);
pn=pn-pn*ps*ps'*pn*(inv(1+ps'*pn*ps));
theta=theta+pn*ps*(yk(t)-ps'*theta);
thet=theta';
a1=thet(1);
a2=thet(2);
b1=thet(3);
b2=thet(4);
a1t(t)=a1;
a2t(t)=a2;b1t(t)=b1;b2t(t)=b2;
end
t=1:N;
plot(t,a1t(t),t,a2t(t),t,b1t(t),t,b2t(t));
text(20,1.47,'a1');
text(20,-0.67,'a2');
text(20,0.97,'b1');
text(20,0.47,'b2');
四.设计实验结果及分析
实验结果图:
仿真结果表明,大约递推到第十步时,参数辨识的结果基本到稳态状态,即a1= 1.5999,b1=1,c1=0.5,d1=-0.7。
五.设计感受
这周的课程设计告一段落了,时间短暂,意义重大。
通过这次次练习的机会,重新把matlab课本看了一遍,另外学习了系统辨识的有关内容,收获颇丰。
对matlab的使用更加纯熟,也锻炼了自己在课本中搜索信息和知识的能力。
在设计过程中虽然遇到了一些问题,但经过一次又一次的思考,一遍又一遍的检查终于找出了原因所在,也暴露出了前期我在这方面的知识欠缺和经验不足。
同时我也进一步认识了matlab软件强大的功能。
在以后的学习和工作中必定有很大的用处。