《机械原理》(于靖军版)第3章习题答案
(完整版)机械原理课后全部习题答案

机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理第3章作业参考

1.根据凸轮的工作轮廓线,画出理论轮廓线
2.以凸轮转动中心为圆心,找出与凸轮理论
轮廓线内切的最小圆即为基圆
3. 凸轮理论轮廓线距凸轮转动中心最近处,
为推程开始点;凸轮理论轮廓线距凸轮转动
中心连向最远处,为推程结束点
4.从推程开始至结束,凸轮转过的角度(也
就是图中推杆相对凸轮反向转过的角度)即
为推程角。
回程角同理可得。
5.推程如图。
3-6b
1.凸轮逆时针转动,所以推杆相对凸轮顺时针转
2.图中与偏置圆相切的最短线为推程的起点,最长线为
推程的终点
3.从推程开始至结束,凸轮转过的角度(也就是图中推
杆相对凸轮反向转过的角度)即为推程角。
回程角同理
可得。
4.在推程的终点,推杆相对起点(基圆上的点)升高的
距离为推程
1.两圆心连线一定过切点(接触点),所以连接OB并延长,可找到滚子在B点接触时的圆心。
O
2.画出理论轮廓线并找出推杆顶尖的位置A'和B',之后作图和分析均以理论轮廓线及推杆的“尖顶”为依据。
3.画出偏置圆,画出推杆的位置,得到转角。
4画出基圆,得到位移S B
5.画出滚子与凸轮接触处公法线(正压力方向),得到压力角。
第三章机械原理《习题答案
解:
(2)瞬心位置如图----3分(3) ----3分
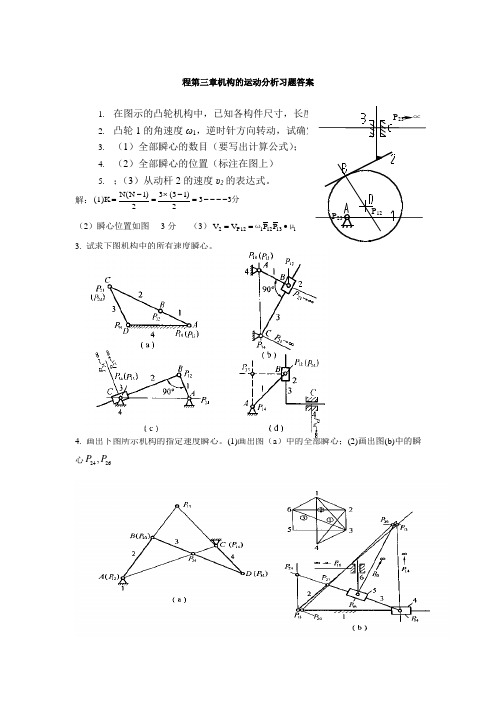
3.试求下图机构中的所有速度瞬心。
4.画出下图所示机构的指定速度瞬心。(1)画出图(a)中的全部瞬心;(2)画出图(b)中的瞬心
6.已知下图所示机构各构件的尺寸,并知原动件1以速度 匀速运动,试确定:
(1)在图示位置时机构全部瞬心的位置;
用相对运动图解法时写出矢量方程画出速度和加速度多边形画图时可不按比例只要矢量方向正确即可
程第三章机构的运动分析习题答案
1. 在图示的凸轮机构中,已知各构件尺寸,长度比例尺μl,
2.凸轮1的角速度ω1,逆时针方向转动,试确定:
3.(1)全部瞬心的数目(要写出计算公式);
4.(2)全部瞬心的位置(标注在图上)
(2)构件2的角速度 、角加速度 及其上C点的速度 和加速度 (写出表达式。用相对运动图解法时,写出矢量方程,画出速度和加速度多边形,画
机械原理第三章习题答案
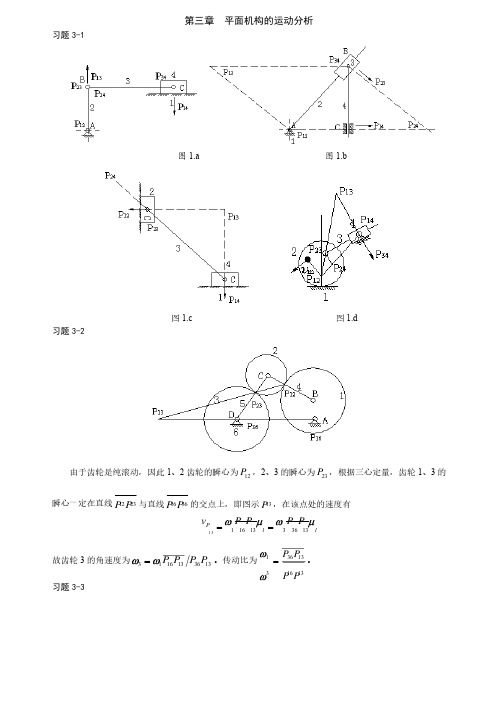
第三章平面机构的运动分析习题3-1 图1.a 图1.b 图1.c 图1.d 习题3-2 由于齿轮是纯滚动,因此1、2齿轮的瞬心为12P ,2、3的瞬心为23P ,根据三心定量,齿轮1、3的瞬心一定在直线2312P P与直线3616P P 的交点上,即图示13P ,在该点处的速度有ll P PP P P P v m w m w 133631316113==故齿轮3的角速度为1336131613P P P P w w =。
传动比为1316133631P P P P =w w 。
习题3-3答:1)三个瞬心中,14P、12P 为绝对瞬心,24P 为相对瞬心。
2)不利用其它的三个瞬心,因为它们全是相对瞬心。
3)构件2和4之间的转向关系可以根据瞬心24P 的瞬时绝对速度方向判断。
的瞬时绝对速度方向判断。
习题3-4取比例尺为mmm l 003.0=m ,作图如下,作图如下1) 由图上可知:l l P P P P P v m w m w 241442412224==,根据量得的长度,得,根据量得的长度,得s rad P P P P/455.414.72/14.32102414241224=´==w w 可计算出C 点的速度为:s m CD v l C /4.0003.030455.44=´´==m w2) 构件1、3的瞬心在点13P 处,且为绝对瞬心,因此构件3的角速度为的角速度为()s rad C P v l c /53.2)67.52003.0/(4.0133=´==mw 显然构件3上速度最小点在E 点,则其速度为点,则其速度为s m EP v l E /36.0003.04.4753.2133=´´==mw 3) 要使0=C v ,需瞬心12P 、24P 重合(如图),两位置分别为0126'=Ð=DAB j ,02227''=Ð=DAB j 。
最新机械原理于靖军版习题答案

讨论题习题4-1试求岀题图4J所示的各机构的全部瞬心。
题图4・14-2在题图4・2所示的凸轮机构中,若已知凸轮2以等角速度顺时针转动,试求从动件上点解:由=①• 1叽=© •厶几勺=© •心可得:5 =解:牛3在题图4・3所示的机构中,已知曲柄1顺时针方向匀速转动,角速度^=100rad/s,试求 在图示位置导杆3的角速度◎的大小和方向。
解: 因已知曲柄2的运动,而所求构件4的运动,所以要求取构件2和4的瞬心巴-根据瞬心的性质,得 CD p ^ =^2P 24P 12=^P 24P \44-4在题图44所示的机构中,已知:图示机构的尺寸,原动件1以匀角速度◎沿逆时针方 向转动。
试确怎:(1)在图上标出机构的全部瞬心:(2)用瞬心法确左点M 的速度心,需 写出表达式,并标岀速度的方向。
题图4・3方向顺时针运题图474-5在题图4-5所示的机构中,已知:图示机构的尺寸,原动件1以匀角速度◎沿顺时针方向转动。
试确定:(1)在图上标岀机构的全部瞬心:(2)用瞬心法确左在此位置时构件3 的角速度3,需写出表达式,并标出速度的方向。
解:相应的瞬心和求解过程可以参考4—4,只需要利用V PH列出等式即可求解。
4-8在题图4-8所示是狡链四杆机构中,各杆件长度分別为/(48=28mm. /5c=70mm, /g二50mm, 加=72mm。
若取AD为机架.作图求该机构的极位夹角& ,杆CD的最大摆角亦最小传动角Tinin °题图4・8解:(1)取比例尺画出机构的极限位置及传动角的极值位置图,分别如图(a)和(b)所示。
由图上量得0 = 13°0 = 71°。
(2)由于+l AD <l BC +l CD ,故存在曲柄。
又由于43为最短杆,故机构演化为双曲柄机构,C, D都是摆转副。
另外,本题也可以利用三角形的边角关系求解具体数值。
但在讣算加in的时候,要注意:4-9已知一偏置曲柄滑块机构,如题图4-9所示。
机械原理课后习题答案

《机械原理》课后习题答案第2章(P27)2-2 计算下列机构的自由度,如遇有复合铰链、局部自由度、虚约束等加以说明。
(a)n=3,p l=3 F=3*3-2*3=3(b)n=3,p l=3,p h=2 F=3*3-2*3-2=1 (B处有局部自由度)(c)n=7,p l=10 F=3*7-2*10=1(d)n=4,p l=4,p h=2 F=3*4-2*4-2=2 (A处有复合铰链)(e)n=3,p l=4 F=3*3-2*4=1 (A或D处有虚约束)(f)n=3,p l=4 F=3*3-2*4=1 (构件4和转动副E、F引入虚约束)(g)n=3,p l=5 F=(3-1)*3-(2-1)*5=1 (有公共约束)(h)n=9,p l=12,p h=2 F=3*9-2*12-2=1 (M处有复合铰链,C处有局部自由度)2-3 计算下列机构的自由度,拆杆组并确定机构的级别。
(a)n=5,p l=7 F=3*5-2*7=1由于组成该机构的基本杆组的最高级别为Ⅱ级杆组,故此机构为Ⅱ级机构。
(b)n=5,p l=7 F=3*5-2*7=1此机构为Ⅱ级机构。
(c)n=5,p l=7 F=3*5-2*7=1拆分时只须将主动件拆下,其它构件组成一个Ⅲ级杆组,故此机构为Ⅲ级机构。
2-4 验算下列运动链的运动是否确定,并提出具有确定运动的修改方案。
(a)n=3,p l=4,p h=1 F=3*3-2*4-1=0 该运动链不能运动。
修改方案如下图所示:(b)n=4,p l=6 F=3*4-2*6=0 该运动链不能运动。
修改方案如下图所示:或第3章(P42)3-2 下列机构中,已知机构尺寸,求在图示位置时的所有瞬心。
(a)(b)(c)(a) v3=v P13=ω1P14P13μl3-6 在图示齿轮连杆机构中,三个圆互作纯滚,试利用相对瞬心P13来讨论轮1与轮3的传动比i13。
第5章(P80)5-2 一铰接四杆机构(2)机构的两极限位置如下图:(3)传动角最大和最小位置如下图:5-3题略解:若使其成为曲柄摇杆机构,则最短杆必为连架杆,即a 为最短杆。
机械原理课后全部习题解答

机械原理课后全部习题解答文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]《机械原理》习题解答机械工程学院目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征机器通常由哪三部分组成各部分的功能是什么2)、机器与机构有什么异同点3)、什么叫构件什么叫零件什么叫通用零件和专用零件试各举二个实例。
4)、设计机器时应满足哪些基本要求试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理作业答案(含相对运动图解法)

F
E D
A
C B 图7
以 EF 为原动件时,其基本杆组及驱动杆组如图 8 所示,为 II 级机构。
E
C
B
D
F
A 图8
16c 以 AB 为原动件和以 EF 为原动件时,均为 II 级机构,其基本杆组及驱动杆组分别如图 9、图
10 所示。
B
E
C
C
F
A
D
图9
B
D
C
C A
F E
图 10
16d 除去机构中局部自由度,高副低代后的机构示意图和其基本杆组及驱动杆组如图 11 所示,II 级 机构。
当 AB 为最长杆时,有 lAB+lAD>lBC+lCD,即 lAB+30>50+35,得到 lAB>55 mm;由于 AB 杆的最大长度不
能大于其余三杆长度之和,即 lAB< lBC+lCD+lAD=50+35=30=115 mm,得到 55 mm< lAB<115 mm。
综合以上分析,得到 AB 杆的取值为:15 mm<lAB<45 mm 或 55 mm< lAB<115 mm
图9
2.20 习题
2.21 习题
221 解 设计步骤为(参见图 11): 1)=180(K1)/(K+1)=180(1.51)/(1.5+1)=36 2)选择长度比例尺l,根据已知条件,作出机架 AD 和摇杆的一个极限位置 DC1,并以 D 为圆心, CD1 为半径画圆弧。连接 AC1;代表摇杆的一个极限位置; 3)根据极位夹角定义,作与 AC1 夹角为 的射线 AC,其与圆弧分别交于 C2 和 C2,则 DC2 和 DC2 均可作为摇杆 CD 的两个极限位置。 4)若将 AC2 视为连杆与曲柄拉伸共线位置,AC1 视为连杆与曲柄重叠共线位置,则 lAB=0.5l(AC2AC1)49.3 mm,lBC=0.5l(AC2+AC1)120 mm 若将 AC1 视为连杆与曲柄拉伸共线位置,AC2 视为连杆与曲柄重叠共线位置,则
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
3-2 计算题图3-1所示各机构(或运动链)的自由度。
并判断其中是否含有复合铰链、局部自由度或虚约束?如有,请指出。
(b)
(d)
(g)
题图3-1
答:
(a )064===H L p ,p ,n ,0624323=⨯-⨯=-=L p n F 。
因为 0=F ,所以不能成为机构。
(b )143===H L p ,p ,n ,01423323=-⨯-⨯=--=H L p p n F 。
因为0=F ,所以不能成为机构。
(c )032===H L p ,p ,n ,0322323=⨯-⨯=-=L p n F 。
因为0=F ,所以不能成为机构。
(d )01410===H L p ,p ,n ,214210323=⨯-⨯=-=L p n F 。
因为 2F ==原动件数,所以能成为机构。
(e )075===H L p ,p ,n ,123=--=H L p p n F 。
D 处有一个复合铰链。
(f )186===H L p ,p ,n , 32362811L H F n p p =--=⨯-⨯-=,I 处有一个局部自由度;B 或C 处的移动副为虚约束;I 处的两个高副之一为虚约束。
(g ) 滚子B 和M 为局部自由度,没有复合铰链和虚约束,因此9=n ,12=L P ,2=H P ,于是该运动链的自由度为:121229323=-⨯-⨯=--=H L P P n F 。
由于该运动链的自由度等于原动件数目,因此具有确定的运动。
3-3 题图3-2所示为一回转式三缸内燃发动机的机构简图。
其中A 、B 、C 处三个活塞,它们依次点火推动从动件绕O 2转动。
(1) 计算机构的自由度。
并指出存在的复合铰链、局部自由度或冗余约束。
(2) 说明该发动机是由哪种四杆机构组成的。
题图3-2
解:机构的自由度为1。
O 1处有复合铰链。
曲柄滑块机构。
无局部自由度和冗余约束。
注:O 1O 2有一个杆。
3-6 试计算题图3-4所示两种8杆机构的自由度,并进行ADAMS 模型运动仿真。
题图3-4
解:两个机构的自由度都为1。
3-7 现要设计一个可调两侧车轮距离的月球探测车,其主体机构拟采用如题图3-5所示的平面六边形机构ABCDEF 。
通过控制安装在铰链A 、B 、C 、D 、E 、F 处的若干电机来改变六边形的形状,达到调整2和5构件之间的距离(即两侧车轮的距离)的目的。
请问,至少需要安装多少个电机才能使该六边形机构具有可控制的形状?为什么?
题图3-5
解:至少需要安装3个电机才能使得六边形机构ABCDEF 具有可控制的形状。
首先选取构件6(其他构件也可以)作为机架,则该六边形机构具有5个活动构件,6个转动副,所以机构的自由度为:362532345=⨯-⨯=--=p p n F 。
3-10 试通过杆组分析来说明题图3-7所示各机构的组成原理。
a) b)
题图3-7。