遥测遥控系统
航标遥测遥控系统在航道维护管理中的应用

航标遥测遥控系统在航道维护管理中的应用随着现代化建设的不断推进,水路交通不断发展,船舶运输的需求也日益增加。
而航道作为船舶运输的必经之路,其维护管理也变得越来越重要。
为确保航道的安全、顺畅,保护船舶运输与人员生命财产安全,航标遥测遥控系统的应用逐渐增多,成为航道维护管理中的重要工具。
航标遥测遥控系统是利用遥感技术和通信技术建立起来的,可以实现对航标的实时监测和远程控制,以保证航标的有效使用和保护。
系统包括航标遥测系统和航标遥控系统两个部分。
航标遥测系统是利用现代化技术对航标的运行状态、灯光、声响等信息进行监测,并将数据通过通讯设施传输到维护单元。
通过该系统,可实时了解航标的运行情况,发现问题及时处理,提高航行安全。
航标遥控系统可以对航标进行遥控,包括灯光开关控制、声响开关控制、电池供电控制等多种控制模式。
遥控系统的应用能够有效地实现航标的状态控制,并且可以提高维修的效率和安全性。
遥测遥控系统的应用对航道的维护管理具有重要意义。
首先,通过对航标的实时监测和遥控控制,可以及时发现航标运行异常情况,防止因航标故障引发航行事故的发生,保证航行安全。
其次,遥控系统可以对航标进行远程维护,避免人员进入水面维护,减少了维修过程中的安全风险,节约了人力物力。
最后,遥控系统能够快速、高效的进行航标位置等参数的调整,提高了航道水深、宽度等参数的精准度。
总的来说,航标遥测遥控系统的应用对于航道维护管理非常的重要。
在提高航行安全、保证航道顺畅的同时,遥控系统还能够节约维护成本,提高维护效率,是一项值得推广的先进技术。
《遥测遥控》课件

军事领域
遥测遥控技术在军事领域的应用包括无人侦察、远程控制 、精确制导等方面,能够提高军事装备的作战能力和生存 能力。
工业领域
遥测遥控技术在工业领域的应用包括设备监测、自动化控 制、远程维护等方面,能够提高工业生产的效率和安全性 。
环境监测领域
遥测遥控技术可用于环境监测领域,实现气象、水文、地 质等方面的实时监测和预警,为环境保护和灾害防治提供 有力支持。
系统设计原则与流程
需求分析
明确系统功能需求,确定系统规模和性能指标。
方案设计
根据需求分析结果,设计系统整体架构和各模块功能。
系统设计原则与流程
01
02
03
硬件选型
根据方案设计,选择合适 的硬件设备,包括传感器 、通信设备等。
软件设计
编写系统软件,实现各项 功能。
系统集成与测试
将各模块集成在一起,进 行系统测试,确保系统稳 定运行。
软件实现
使用编程语言实现软件设计, 编写代码并进行单元测试。
软件测试
对软件进行集成测试和系统测 试,确保软件功能正常、性能
稳定。
CHAPTER
05
遥测遥控技术的发展趋势与展 望
遥测遥控技术的未来发展方向
智能化
遥测遥控技术将向智能化发展, 通过人工智能和机器学习技术实 现对遥测数据的自动处理和分析 ,提高遥测遥控系统的自动化水
遥测遥控技术的发展面临的挑战与机遇
挑战
遥测遥控技术的发展面临着技术更新换 代、数据安全与隐私保护等方面的挑战 ,需要不断加强技术研发和创新,提高 系统的可靠性和安全性。
VS
机遇
随着各领域对遥测遥控技术的需求不断增 加,遥测遥控技术的发展将迎来更多的机 遇和空间,有望在未来发挥更加重要的作 用。
小型无人机遥测遥控系统的方法研究

小型无人机遥测遥控系统的方法研究摘要:根据无人机的不断发展,介绍了小型无人机遥测遥控系统的概念、组成以及相关的工作原理结构,分析了遥测信息采集、传输、数据处理的方法以及遥控系统数据保护的工作内容,并着重阐述了调制体制、信道编码、差错控制几种关键技术。
关键词:遥测遥控调制差错控制1前言作战无人机的关键技术包括高速、高机动性能和武器挂载,以及与有人机一同执行任务时的控制和指挥能力。
无人机在执行飞行任务时,由地面站人员发出遥控指令加以控制,使之完成相应的任务,实现预期的目的,将一定距离以外被测对象的参数,经过采集,通过传输介质送到地面接收站并进行解调、记录、处理的过程,就是通过遥测遥控系统来实现的,可以说,遥测遥控系统是无人机的决策部分。
2无人机遥测系统无人机遥测系统是以现代信息技术为基础的应用系统,是无人机系统中的重要组成部分。
2.1遥测系统的工作原理在发送端,待测参数通过传感器转换成电信号,通过信号解调器转换成适合采集的信号,通过多路复用装置按一定体制集合在一起,再由发射机的载波,经功率放大后通过天线发向信号接收端。
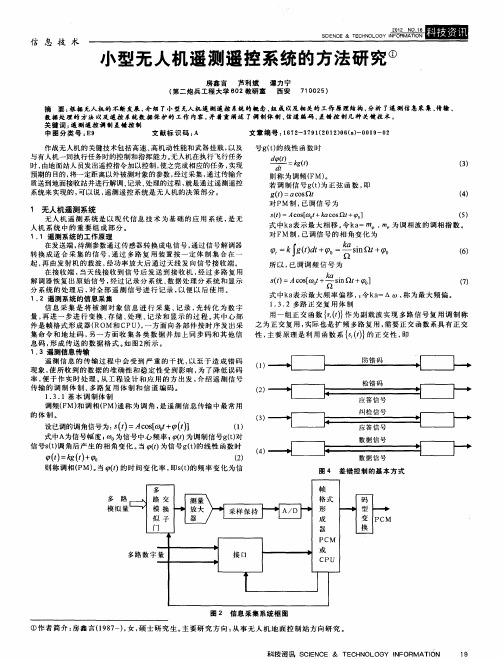
在接收端,当天线接收到信号后发送到接收机,经过多路复用解调器恢复出原始信号,经过记录分系统、数据处理分系统和显示分系统的处理后,对全部遥测信号进行记录,以便以后使用.2.2遥测系统的信息采集信息采集是将被测对象信息进行采集、记录,先转化为数字量,再进一步进行变换、存储、处理、记录和显示的过程。
其中心部件是帧格式形成器(ROM和CPU),一方面向各部件按时序发出采集命令和地址码,另一方面收集各类数据并加上同步码和其他信息码,形成传送的数据格式。
如图2所示:2.3遥测信息传输遥测信息的传输过程中会受到严重的干扰,以至于造成错码现象,使所收到的数据的准确性和稳定性受到影响,为了降低误码率,便于作实时处理。
从工程设计和应用的方出发,介绍遥测信号传输的调制体制、多路复用体制和信道编码。
2.3.1 基本调制体制调频(FM)和调相(PM)通称为调角,是遥测信息传输中最常用的体制。
小型无人机遥测遥控系统的方法研究
( 2 )
中 图分 类 号 : 9 E
文 献标 识 码 : A
文章 编号 : 2 3 9 (0 20 () 0 1- 2 1 7 - 7 12 1)6a 0 9 0 6 -
作战 无 人机 的 关键 技术 包括 高速 、 机动 性 能和武 器 挂载 , 及 号 g t的 线性 函数 时 高 以 () 与有人机 一 同执 行任 务时的控 制和 指挥 能力 。 无人机 在执行 飞行 任务 k ( gf ) 时, 由地 面站人 员发 出遥控指 令加 以控制 , 使之 完成相 应的 任务 , 实现 预 期的 目的 , 将一 定距离 以外被 测对象 的参 数 , 经过 采集 , 过传输 介 通 0 为 调频 ( M) 称 F 。 质送到地 面接收 站并 进行解调 、 记录 、 理的过 程 , 处 就是通过 遥 测遥控 若 调 制 信 号g t为 正 弦 函 数 , () 即 系统 来实现 的 , 以说 , 可 遥测 遥控 系统 是 无 人机 的决 策部 分 。 g f=a o  ̄t ( ) cs
:
() 4
st=,c s% t ac s 2+妒 ] () 4 o [ +k o ft 0 () 5 无 人 机 遥 测 系 统 是 以 现 代 信 息 技 术 为 基 础 的 应 用 系 统 , 无 是  ̄ gk 表 示 最 大 相移 。 " a Oa 4 k =m。 m 为调 相 波 的调 相 指 数 。 人机 系统 中 的 重 要 组 成 部 分 。 对F M制 , 已调 信 号 的 相 角 变 化 为 1 1遥 测系统 的工 作原 理 . 在发 送端 , 测 参数通过 传 感器 转换 成 电信 号 , 过信 号 解调 器 待 通 转换 成适 合采 集 的 信号 , 过 多 路 复 用 装 置 按 一 定 体 制 集 合 在 一 通 起 , 由发 射 机 的 载波 , 再 经功 率 放 大后 通 过 天 线发 向信 号接 收 端 。 所 以 , 调 调 频 信 号 为 已 在 接 收端 , 当天 线 接收 到信 号 后 发 送 到接 收机 , 过 多 路 复 用 经 h 解调 器恢 复 出原 始 信 号 , 过记 录 分 系统 、 经 数据 处 理 分 系 统 和显 示 ( =ACS(t s a+‰] f ) O[0+ O i t nf () 7 分 系统 的 处理 后 , 全 部 遥 测 信 号 进 行 记录 , 对 以便 以 后 使 用 。 式 中k 表示 最 大频 率 偏移 , 令 k =Ac 称 为最 大 频 偏 。 a ; a o, 1 2 遥 测系 统的信 息采 集 . 1 3 2多 路 正 交 复 用 体 制 .. 信 息 采 集 是 将 被 测 对 象 信 息 进 行 采 集 、 录 , 转 化 为 数 字 记 先 用一组正交函数 ( } f 作为副载波实现多路信号复用调制称 ) 量 , 进 一 步 进 行 变 换 、 储 、 理 、 录 和 显 示 的过 程 。 中 心部 再 存 处 记 其 实 需 件是 帧格 式 形成 器 ( M和 C RO PU)一 方 面 向 各部 件 按 时 序 发 出采 之 为正 交 复 用 , 际 也是 扩 频 多路 复 用 , 要 正 交 函数 系具 有 正交 , 集 命 令和 地 址 码 , 另一 方 面 收 集 各 类 数 据 并 加 上 同 步 码 和 其 他 信 性, 主要原理是利用函数系 ( } t 的正交性, ) 即 息码 , 成 传 送 的数 据 格 式 。 图2 示 。 形 如 所 1 3遥 测信息 传输 . 防 错 码 遥 测 信 息 的 传 输 过 程 中 会受 到 严 重 的 干 扰 , 以至 于 造 成 错 码 () 1 现象 , 使所 收 到 的 数据 的准 确性 和稳 定 性 受 到影 响 , 了降 低误 码 为 率 , 于 作 实 时 处 理 。 工 程 设 计 和 应 用 的 方 出 发 , 绍遥 测信 号 便 从 介 检 错 码 传输 的 调 制 体 制 、 路 复 用 体 制 和 信 道 编 码 。 多 () 2 1 3 1基 本 调 制体 制 .. 应 答 信 号 调 频( M ) 调 相( M) F 和 P 通称 为 调 角 , 遥测 信 息 传输 中最 常 用 是 纠 检 信 号 的体制。
遥控遥测技术在电力系统中的应用
遥控遥测技术在电力系统中的应用现代电力系统的调度中心需要采集和处理的数据数量多,实时性要求高,遥控遥测技术通过对信号的测量、传输、反馈和控制发送具有很好的实时性和稳定性,因而在电力系统中有了广泛的应用。
本文对遥控遥测原理的作了简单的描述,同时对遥控遥测技术在电力系统中的应用和发展前景作了详细的论述。
标签:遥控遥测电力系统信号通讯网1 遥控遥测技术简述遥控遥测技术一门新兴的学科,它融合了信息管理技术、现代通讯技术、自动控制技术和计算机技术的一门综合性科学技术。
遥控遥测技术的发展经历了一下的阶段:最早的遥测遥控系统是机械式,20世纪初出现无线遥测遥控系统,70年代后由于微电子学和微处理机的迅速发展,数字式遥测遥控系统逐渐取代模拟式遥测遥控系统,并出现可编程序遥测遥控系统、自适应遥测遥控系统和分集式遥测遥控系统。
遥测遥控系统有两个分系统:遥测分系统和遥控分系统。
实际上它们往往结合成有机的整体。
一般遥测遥控系统都是由控制端、信道和被控端3部分组成。
1.1 测控系统的分类:1.1.1 从传输媒介分有线测控系统:利用电线、电力线、电缆、光缆等作为传输媒介;无线测控系统:利用电磁波、红外线等在自由空间的传播来传输测控信息;基于网络环境的测控系统:基于各种网络来传输测控信息。
1.1.2 多路复用传输方式分类频分多路复用FDM:频分多路测控系统;时分多路复用TDM:时分多路测控系统;码分多路复用CDM:码分多路测控系统;1.2 遥控遥测系统的信号控制和传输技术遥测遥控技术是远距离传送信息的技术。
目前遥测遥控系统一般都是数字式,遥测遥控信息以数字信号形式传送。
数字通信具有两种传输方式:基带传输和频带传输。
这两种数据传输方式各具优缺点,在遥测遥控系统中,一般均采用频带传输,数字信号通过调制解调器利用模拟信道传输数据信息。
1.3 基于网络的环境的监测技术随着网络技术的高速发展及网络的普遍应用, 基于网络的远距离测量与控制技术得到了迅速发展,遥测遥控技术被赋予了新的内涵。
基于GPRS网络的嵌入式实时遥测遥控系统

件设 计时, 用双UART ( Unive rsal 又利
Asynchronous Receiver Trans mitter ) 异步
~ ~ ~
通信芯片T16C552 扩展两个串行口 分别与 GPRS 通信模块的标准RS232 端口连接和与 外部电力仪表通讯。单片机自 身的UART经 电平转换后可与PC机串行口连接, 调试 作为 监视端口,负贵软件程序下载、调试 参数 设置以及运行监视等。整个终端除了以上 核 心模块外, 还有复位电路、实时时钟等功能 模块,功能丰富,实现简单, 成本较低。 终端系统的GPRS 通信模块选用了北京 基创汇志公司开发的ITM100o 该模块内嵌 TCP/IP 协议 具有简化的接口 栈, 设计。 屏蔽了 G尸 模块的复杂接口方式和接口 RS 协议栈, 取
基于 GPRS 网络的嵌入式 实时遥测遥控系统
. 青岛大学自动化工程学院 王红红
临沂电业局
山东电力超 高压公司
蒋世燕
王宏伟
摘 要 捉出并设计了 基于GPRS 网络的嵌入式实时遥浏遥控系统。该系统的终端设计使用了 嵌入 式实时操作系统,并通过GPRS 网络进行数据通信,具有高可靠性、高实时性和运行费用低等 特点。
而代之的是通用的 RS232 接口ቤተ መጻሕፍቲ ባይዱ和简单的A下
GPRS 网络是建立在GSM 网络基础之 上的。其特点是将GSM 网络的硬件变化降 到最低,即在GSM 网络的基站子系统 日 SS
从总体上说, RS 网由移动台、 G尸 基站子 系统、交换子系统、管理子系统4 部分组成, 其中移动台、基站子系统和交换子系统协同 工作, 为用户提供业务; 管理子系统完成整个
现下送终端参 和表计参 、即时抄表、表
无线遥控遥测系统的设计与实现
无线遥控遥测系统的设计与实现李武;资员;荣军;陈松【摘要】设计了一个无线电遥感信号发送与接收系统.系统主要由发送端和接收端两部分组成,整个系统以AT89S52单片机为控制核心.发送模块采用 A/D 转换芯片TLC549进行模拟信号的采集,将采集的模拟信号转化成为数字信号,并对其进行格雷码编码,通过 SP 多用途无线数据发送模块进行 ASK 调制,然后通过天线发送出去.接收模块通过SP 多用途无线数据接收模块接收数据,并对接收的数据进行解码,然后通过三位 LED 显示所测得的模拟信号.测试结果表明,遥测信号范围为0~2.5V DC,发射距离100~200米。
%The paper designs a transmitting and receiving system of radio remote sensing signal, and the system is composed of the sender and the receiver, and the whole system takes the AT89S52 microcontroller as the control core. The sending modular uses A/D transformation chip TLC549 to collect the analog signal, and transforms the analog signal into the digital signal, and also puts them into the gray code. The system makes for ASK modulating through the SP multi-purpose wireless data transmission module, and then they are sent by antenna. The receiver modular receives the data through SP multipurpose wireless data, and decodes the received data, and then displays the measured analog signal through LED of three bit. After the system finishes the hardware and software and the system is measured, and the range of the telemetry signal is 0 to 2.5DC, and the transmission distance ranges from100 to 200 meters.【期刊名称】《湖南理工学院学报(自然科学版)》【年(卷),期】2015(000)002【总页数】4页(P44-47)【关键词】遥感信号;单片机;ASK;格雷码;A/D 转换【作者】李武;资员;荣军;陈松【作者单位】湖南理工学院信息与通信工程学院,湖南岳阳 414006;湖南理工学院信息与通信工程学院,湖南岳阳 414006;湖南理工学院信息与通信工程学院,湖南岳阳 414006;湖南理工学院信息与通信工程学院,湖南岳阳 414006【正文语种】中文【中图分类】TM391.9早期的无线遥测遥控系统主要用于航空航天和军事领域. 近些年来, 随着应用成本的降低, 这项技术正逐渐向民用方向发展, 并且已被许多工矿和企事业单位所使用, 因而研究先进而且实用的无线遥测遥控系统对工农业生产具有重要的现实意义. 文[1, 2]设计的遥感信号接发送系统, 由于无线信道资源的有限性以及无线传输中的信道衰落和外部噪声干扰问题, 造成系统实时性和可靠性不高. 文[3, 4]设计的无线遥测遥控系统共性为使用范围比较窄, 而且系统比较复杂, 价格过于昂贵. 针对以上问题, 本文设计一种结构简单, 能够适用于各种不同现场的通用性无线遥测遥控系统. 该无线遥测遥控系统具有性价比高、抗干扰能力强的特点.无线遥测遥控系统总体结构框架如图1所示. 数据采集部分通过A/D转换芯片TLC549进行外部模拟信号的采集, 然后通过单片机AT89S52控制在LED上对所采集的数据进行显示, 单片机AT89S52对其进行信号加密的同时, 通过无线数据发送模块把信号发送出去. 在接收端通过数据接收模块接收数据, 并对所收集的数据进行解码, 最终通过单片机输送到LED上显示. 本设计的无线数据发送与接收模块均采用SP(Service Provider)多用途无线数据收发模块, 通过SP进行ASK(Amplitude Shift Keying)调制. 它支持数据的收发, 能实现双工通信. 本文把这一部分设计成一个单独的模块, 以接插件的形式与单片机相连, 方便其功能扩展与应用.2.1 供电模块电路设计本设计中由于单片机与A/D转化芯片TLC549共用VCC(+5V)电源, 而SP无线收发模块的工作电压为3~12V, 虽然它也可以工作在+5V, 但高频通信部分很容易受其他部分干扰, 因此设计独立的电源可以达到更好的抗干扰要求. 但在供电电路设计中, 通过检测发现SP无线收发模块同单片机共用电源并没有产生明显的高频干扰. 为了节省成本, 在本设计中采用同一模块电源供电, 其工作电路原理图如图2所示[5].2.2 A/D转换模块电路设计A/D转换电路是数据控制的核心. 在本设计中选用A/D转换芯片TLC549. 它为8位串行A/D转换器芯片. 该芯片有一个模拟输入端口, 3态的数据串行输出接口可以方便地和微处理器或外围设备连接. 由于TLC549是串行A/D转换芯片, 它与单片机AT89S52通信是串行的, 因此在通信时, 单片机首先给/CS一个有效的低电平信号使TLC549选通,并启动A/D转换开始, 置/CS端为高电平并延时17μs等待A/D转换结束; 当A/D转换结束,置/CS端为低, 再次调用读入8位转换结果子程序, 即可读入本次A/D转换结果. 其中基于TLC549的A/D转换模块电路图如图3所示[6].2.3 SP发送与接收模块电路设计无线遥测遥控系统设计的关键是SP接发收电路的设计, 其中SP发送和接收模块电路分别如图4和图5所示.在图4所示的SP发送模块设计中, 需要考虑在高电平传输过程中, 容易造成接收模块的误判, 因此三极管Q2应设计为PNP型三极管, 将输出信号反相, 从而使接收模块能够方便和准确地接收信号.在图5所示的SP接收模块电路设计中, 通过在信号输出端接9013NPN型三极管, 使输出端数据进行反相,还原发送信号, 通过单片机AT89S52控制LED进行显示.2.4 LED显示模块电路设计数码显示有静态显示和动态显示两种显示方法. 在静态显示电路中, 当显示位数较多时其占用的I/O口较多, 从而会影响处理器的处理速度. 因此在本设计中采用动态显示方式, CPU定时对LED进行扫描,各LED轮流地显示各自的字符. 虽然在同一时间只有一位显示, 但由于人眼的视觉暂留效应和发光二极管熄灭时的余辉效应, 看到的是各LED同时显示不同的字符, 这样便可以大大节省I/O资源, 提升系统效率. LED显示模块电路原理图如图6所示[7].2.5 软件程序设计根据系统应用程序模块化结构设计理论和模拟信号遥测系统实现的功能, 数据采集系统的应用软件设计分为系统管理程序、模数转换子程序、键盘显示子程序和通讯子程序四个软件设计, 其程序设计总体原理框图如图7所示. 在图7中的系统管理程序的主要作用是在系统完成初始化后, 系统根据用户的输入和设置转入相应的功能子程序, 主要控制和管理子程序,并完成系统在各功能模块间的切换. 模数转换子程序的主要功能是进行数据采集、模数变换和保存. 键盘显示子程序作为人机交互最主要的部分, 它主要功能是负责输出信号的正确显示. 通讯子程序主要功能是响应单片机的串行口中断, 把采集到的信号通过射频芯片发送出去.在完成遥感信号发射与接收系统的软硬件设计后, 对其进行了实际测量, 测试结果为在单片机的发送端将模数转换得到的数据进行显示, 同时进行格雷码编码并通过SP发送模块发送, 其数据发送端测试结果如图8所示[8]. 接收端将SP接收模块收到的数据进行解码, 解码后的数据通过LED显示, 其数据接收端测试结果如图9所示, 从图8和图9 可以很清晰地看到显示结果都为1.95V, 接收端与发送端的数据完全一致, 实现了无线遥测遥控的功能.综上所述, 无线遥测遥控系统的实现从整体设计开始, 对方案选择、原理设计、器件选型以及工艺功耗等多方面进行了仔细考虑. 以降低系统的设计成本和运行维护费用为主要出发点, 并考虑整个系统的应用场合和抗干扰能力, 最后完成了整个系统的硬件电路设计和软件程序编写, 并顺利通过测试, 测试结果完全符合设计要求.【相关文献】[1] 邵志龙. 无线实时遥测遥控系统的硬件实现[D]. 杭州: 浙江大学硕士学位论文, 2004[2] 周畅. 无线实时遥测遥控系统的软件实现[D]. 杭州: 浙江大学硕士学位论文, 2004[3] 吕永祥. 基于无线传感网络的三峡库区变动回水区航道航标遥测遥控系统研究[J]. 水运工程, 2013, 3(3): 176~183[4] 钟伟, 王瑛. 基于扩频的无线遥测遥控系统的研究与实现[J]. 黑龙江大学自然科学学报, 2002, 19(2): 67~69[5] 胡国珍, 马学军, 陆小洲, 等. 一种两级式LED恒流驱动电源设计[J]. 计算技术与自动化, 2015, 34(1): 44~47[6] 吴允平, 蔡声镇, 刘华松, 等. 航标遥测遥控信息系统的设计与实现[J]. 计算机工程. 2006, 6(12): 253~254, 260[7] 黄智伟. 无线遥测遥控系统的设计与应用[J]. 自动化与仪表, 1993, 8(1): 33~35[8] 刘文涛. 单片机语言C51典型应用设计[M]. 北京: 人民邮电出版社, 2005。
遥测遥控专业划分
遥测遥控之魅
遥测遥控专业划分
1. 遥测技术
遥测技术是利用传感设备对各种参数进行测量,并将测量数据传输至远程接收设备进行处理和应用的一种技术。
它广泛应用于航空、航天、军事、气象、环保等领域,用于获取各种参数,如温度、压力、速度、距离等。
2. 遥控技术
遥控技术是利用无线电或其他传输介质,对远程设备或系统进行控制和操作的一种技术。
它广泛应用于无人机、智能家居、机器人等领域,用于实现远程控制、智能感知和自主导航等功能。
3. 信号传输
信号传输是遥测遥控系统中的重要环节,负责将测量数据和操控指令传输至远程接收设备。
信号传输可以采用不同的传输介质和协议,如无线电波、卫星通信、网络通信等,以保证数据传输的可靠性和实时性。
4. 数据处理与分析
数据处理与分析是遥测遥控系统中的关键环节,负责对接收到的数据进行处理、分析和挖掘。
数据处理可以采用不同的算法和技术,如滤波、压缩、识别、预测等,以提取有用的信息,为后续的应用提供支持。
5. 故障诊断与预测
故障诊断与预测是遥测遥控系统中的重要应用之一,负责对远程设备或系统进行故障诊断和预测。
通过对设备或系统的运行状态进行实时监测和数据分析,可以及时发现潜在的故障和异常情况,并采取相应的措施进行预防和解决。
6. 目标跟踪与定位
目标跟踪与定位是遥测遥控系统中的另一重要应用,负责对目标进行跟踪和定位。
通过对目标进行实时监测和数据处理,可以实现对目标的精确跟踪和定位,为军事侦查、无人机配送、智能交通等领域提供支持。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
遥测遥控系统利用技术实现远距离测量、控制和监视的系统。
在遥测遥控系统中,测量装置和执行机构设置在受控对象附近,受控对象参量的测量值通过遥测信道发向远距离的测控站,而测控站的控制指令也是通过遥测信道发向执行机构的。
遥测遥控系统是一类控制与通信密切结合的综合信息系统(括、、、、、等方面。
遥测遥控是自动化技术的重要分支,它是在自动控制、传感术、微电子技术、计算机技术和现代通信技术的基础上不断完善和发展起来的,在国民经济、科学研究和军事部门,如无人驾驶飞机图1[遥测遥控系统示意]),其工作原理涉及信息传输和信息提取,包技导弹、人造卫星、宇宙飞船、航天飞机、核工业、电力系统、输油和输气管线、空中交通管制、铁路调度、地震预报台网、无人自动气象站、城市公用事业、医疗诊断等方面都有广泛的应用。
凡是距离遥远、对象分散或难以接近的系统,都可以采用遥测遥控来实现集中监控和统一管理。
发展简史 最早的遥测遥控系统是机械式遥如利用齿轮系等机械传动方式测量转速,测控范围只有几米。
后来采用流体耦合方式(液压或气动),测控范围扩大到几百米。
伺服机构发明后,人们借助于伺服机构来进行遥测和遥控。
19遥控系统。
1912年美国芝加哥发电厂就利用电话线把电功率的运行参数传送到中央控制室,中央控制室根据负荷的分布进行调度,使每台发电机以最经济的方式分担负荷。
20世纪初出现无线遥测遥控系统。
1905年法国物理学家E.布兰利用电磁波使一外的小灯泡发光,电动机转动。
从控制原理上分析这是开环无线遥控。
1906年西班牙工程师克维多用无线电控制汽艇获得成功。
这是首次采用闭环无线遥控测遥控系统,开始是利用机械耦合的方式,世纪末出现电遥测遥控系统,利用架空明线或电缆作为传输介质,现在称为有线遥测定距离在第一次世界大战期间,1917年3月2日德国在进攻纽波特港时第一次在实战条件下由飞机对满载炸药的快艇进行无线遥控。
美国陆军从1917年开始设计遥控飞行器(无人驾驶飞机),到20年代末遥控飞行器的往返飞行距离已达1000公里。
1930年无线遥测开始用于气象,人们利用气球装载测量仪器来测量高空的温度、压力、温度等参量,并发回地面测量站。
在第二次世界大战期间,由于军事上的需要,无线遥测遥控得到了迅速的发展。
到大战末,德国已研制成V-2导弹和莱茵号防空导弹。
1941~1954年先后研制成供飞机和火箭用的调频/调频遥测系统(见),以及脉幅调制和脉宽调制等遥测系统(见)。
到了50年代又研制出脉码调制遥测系统,标志着从模拟式遥测系统发展到数字式遥测系统。
1957年苏联发射第一颗人造地球卫星以后,无线遥测遥控随着航天技术的发展又进一步得到迅速的发展。
60年代后无线遥测遥控在工业上开始得到广泛的应用,出现各种分散目标的监控系统。
70年代后由于微电子学和微处理机的迅速发展,数字式遥测遥控系统逐渐取代模拟式遥测遥控系统,并出现可编程序遥测遥控系统、自适应遥测遥控系统和分集式遥测遥控系统。
现代航天遥测遥控系统的最大传输距离可达2.4亿公里,能传输每帧2.4×10比特的数字图像信息。
在编码和译码方面发展了各种快速算法。
美籍中国科学家张肇健等人用数论方法简化里德-所罗门码,并在超大规模集成电路上实现,使元件数下降一个数量级,为使用多位纠错编码创造了条件。
航天测控系统已发展到利用一个微波波段的载波作为遥控、遥测、测距和测速的共同载波,称为S 波段统一载波测控系统,使设备大大简化。
基本组成 遥测遥控系统有二个分系统合成有机的整体。
由于遥测遥控的方法不同,技术要求不同,被控对象不同,遥测遥控系统具有多种型式。
一般遥测遥控系统都是由控制端、信道和被控端三部分组成。
图2[遥测遥控系统原理图]:遥测分系统和遥控分系统。
实际上它们往往结是遥测遥控系统原理图。
图3[ 遥测遥控系统框图]是一个典型的遥测遥控系统的框图。
遥测遥控系统的控制端包括计算机指令发生器、编码器、指令传输设备的发射部分(调制器、发射机和发射天线)、监测系统的接收部分和指令监控台等。
遥测遥控系统的被控端包括监测系统的发射部分、指令传输设备的接收部分(接收天线、接收机和解调器)、译码器、执行机构和被控对象等。
指令发生器用来产生标准遥控指令及与误差信号相对应的指令,可以由人操作,也可按一定程序自动操作。
有的指令发生器中备有指令编码器,能把指令信号编成码组,以便区别指令和提高抗干扰性。
监测系统用来监视和测量被控对象的实际状态,并将此实际状态与规定的状态在计算机中进行比较,当二者不一致时,计算机便给出一个误差信号,由指令发生器产生与误差信号相对应的遥控指令,通过指令传输设备送到被控端,使执行机构动作,以改变被控对象的实际状态。
此实际状态又通过监测系统送到计算中心进行比较,直到被控对象的实际状态与规定的状态相一致。
由于遥控任务和监测参数的不同,监测系统也不同。
常用的监测系统有目视、电视、雷达、导航和遥测等监测系统。
在简单的遥控系统中利用目视来监测被控对象的实际位置(状态)。
如果实际位置与规定位置有偏差,操作员就发出指令,通过指令发生器和指令传输设备,使执行机构动作,以改变被控对象的实际位置。
这种监测系统就称为目视监测系统。
目视监测系统监测距离有限,精度不高,并且只限于监测被控对象的外部运动参数。
利用电视技术对被控对象进行监测的系统称为电视监测系统。
电视监测系统又有两类:一类是将发射部分装在被控端,接收部分装在控制端,在屏幕上观测被控对象的状态或位置。
一类是利用电视跟踪技术,其原理与雷达相同电视监测系统能监测被控对象的外部运动参量和内部状态参量,并能看到图象,但设备比较复杂,监测效果受气象条件的影响。
电视监测系统广泛用于工业生产、铁路动输、制导和宇航等方面。
雷达监测系统主要用于舰艇和各种飞行器的指令遥控系统,能监测它们的外部运动参数(距离、速度和角度),自动跟踪运动目标,监测距离远,并不受气象条件的限制。
利用导航原理来确定被控对象的位置和运动参数的系统称为导航监测系统,它广泛用于弹道导弹、人造卫星、宇宙飞船和航天飞机的监测。
利用遥测原理对被控对象进行监测的系统称为遥测监测系统,它能够测量和传输被控对象的外部运动参量和内部状态参量,在工业生产和管理自动化等遥控系统中得到广泛的应用。
指令传端的执行机构。
指令传输设备包括调制器、发射机、发射天线、接收天线、接收机、解调器等。
编码器用来把指令信号编成码组,以区分指令信号,提高可靠性、抗干扰性和保密性。
编码器的主要组成部分是编码矩阵。
译码器把收到的指令码组译成原来的指令信号。
译码器的主要组成部分是译码矩阵。
执行机构是使被控对象按遥控指令动作的机构,执行机构要有足够的输出功率,使被控对象动作。
如二值指令的执行机构是继电器或电动机,多值指令的执行机构是同步电机或直流放大器。
指令监控台是遥控系统的专用设备,它可以用来对发送的指令进行控制、选择、监视和记录,并能对各种遥控设备进行监视、控制和自动切换。
它能确定发送指令的内容,选择发送指令的时机和执行任务的设备。
它能监视设备的工作状态,监视指令的发送和执行情况,监视系统间的往返信号,以及记录所有发出和返回的信号。
主要类型 遥测遥控系统可按下列八个方面进行分类:①按信号传输介质可分为有线和无线遥测遥控系统。
②按信号传输方式可分为直接传输式和③按信号变换方式可分为模拟式和数字式。
④按测控方式可分为开环和闭环遥测遥控系统。
⑤按多路划分原理可分为时分制、频分制和码分制。
⑥按调制方式可分为脉幅调制/调频/调频三重调制输设备用来将指令信号从指令发生器传输到被控载波传输式。
(PAM-FM-FM),调频/调频二重调制(FM-FM),脉宽调制(PDM),脉位调制(PPM),脉码调制(PCM)等。
⑦按系统结构可分为1:1、(1:1)×、M:、1: 等四种工作方式(图4[遥测遥控系统的结构类型])。
⑧按操作方式可分为一次动作型、二次动作型和三次动作型。
此外,还可按系统功能和网络拓扑等进行分类。
技术要求 在设计和选择遥测遥控系统时一般遵循下列技术要求:①准确度:一般可定义为被测量或被定的精度,常采用差错校验、纠错编码和各种抗干扰措施。
②可靠性:指遥测遥控系统在规定的工作条件下能达到规定技术指标的能力。
由于遥测遥控系统往往用于重要部门,又常常无人值班监视,所以对系统可靠性要求很高,通常误动作率为10(~10(。
其中多路传输设备的可靠性尤为重要,常设置备份,一旦发生故障,就自动切换。
③工作容量:指遥测遥控系统的信息传输能力工作容量 定义为信道数与信号频谱极限频率的乘积,即=。
在频分制中,各路信号的频谱的极限频率不同,可用下式计算:[544-01]。
④抗干扰能力:指遥测遥控系统在有干扰的情况下仍能保证规定技术指标的能力。
遥测遥控系统的主要干扰有工业干扰、起伏干扰、大气干扰、振动干扰和路际干扰(即信道之间的相互干扰)等。
⑤动作速度:决定于信息传输速度和系统的结构。
对动作时间的要求视具体情况而定。
⑥工作频段:无线遥测遥控系统要根据国际上的约定和国家的规定选用合适的频段。
国际上IRIG 规定从1970年7月1日起遥测只能使用两个频段:1435~1535兆赫作为飞行器和导弹试验用,2200~2300兆赫作为固定和移动通信及一般遥测用,并规定了三种通频带宽,即窄频带(<1兆赫)中频带(1~3兆赫),宽频带(3~10兆赫),1975年中国无线电管理委员会规定的两个遥测频段则是 223~235兆赫和410~470兆赫。
⑦通用性:为了增强系统的适应性,可采用可编程序遥测遥控系统。
⑧经济性。
控量的相对误差。
为了保证系统能正确地执行遥控命令,并使被测参量具有一,。