汽车理论第六章汽车的平顺性PPT演示文稿
合集下载
汽车理论第六章汽车的平顺性
a互功率谱密度
Gxy(n)=Gxy(n)e-jxy(n)
互振幅谱
相位谱
b相干函数:为 了 研 究 信 号 y(I)中 有 多 少 来 自 x(I), 引 入 了 相 干 函 数
2
coh2xy(n)=GxyG(nxy)(Gn)yx(n)
相干函数
c
o
h
2 x
y
(
n
)
在频域内描述了 x ( I ) 与 y ( I )
路面不平度 8 级分类
路面等级
Gq(no)×10-6m2/m-1
no=0.1m-1
下限 几何平均值 上限
σ q×10-3m 0.011m-1<n<2.83m-1
下限 几何平均值 上限
A
8
16
32 2.69
3.81
5.38
B
32
64
128 5.38
7.61
10.77
C
128
256
512 10.77 15.23 21.53
F1(n)=X(n) F1(n)=X(n)
F2(n)=X(n)e-j2nL
G11(n)T li m T 1X(n)X1(n)
G 12(n)T li m T 1X(n)X(n)e-j2nL
G21(n)T li m T 1F2(n)F1(n)T li m T 1(X(n)e-j2nL)*X(n)
=lim1X*(n)X(n)ej2nL
F 2 (n )= F q 2 (I)= F y (I L )= Y ( n ) e - j 2 n L
将四个车轮不平度函数的傅里叶变换代入 G ik ( n ) 算出
各谱量和两个轮迹之间的自谱G xx(n) G yy(n)互谱 G xy(n) G yx(n)的关系:
Gxy(n)=Gxy(n)e-jxy(n)
互振幅谱
相位谱
b相干函数:为 了 研 究 信 号 y(I)中 有 多 少 来 自 x(I), 引 入 了 相 干 函 数
2
coh2xy(n)=GxyG(nxy)(Gn)yx(n)
相干函数
c
o
h
2 x
y
(
n
)
在频域内描述了 x ( I ) 与 y ( I )
路面不平度 8 级分类
路面等级
Gq(no)×10-6m2/m-1
no=0.1m-1
下限 几何平均值 上限
σ q×10-3m 0.011m-1<n<2.83m-1
下限 几何平均值 上限
A
8
16
32 2.69
3.81
5.38
B
32
64
128 5.38
7.61
10.77
C
128
256
512 10.77 15.23 21.53
F1(n)=X(n) F1(n)=X(n)
F2(n)=X(n)e-j2nL
G11(n)T li m T 1X(n)X1(n)
G 12(n)T li m T 1X(n)X(n)e-j2nL
G21(n)T li m T 1F2(n)F1(n)T li m T 1(X(n)e-j2nL)*X(n)
=lim1X*(n)X(n)ej2nL
F 2 (n )= F q 2 (I)= F y (I L )= Y ( n ) e - j 2 n L
将四个车轮不平度函数的傅里叶变换代入 G ik ( n ) 算出
各谱量和两个轮迹之间的自谱G xx(n) G yy(n)互谱 G xy(n) G yx(n)的关系:
汽车理论---第六章 汽车的平顺性(6.3)

即 σ=z 0.39g 时,可以使 超过1g的概率P=1%。
34
第三十四页,共59页。
第三节 汽车振动系统的简化,单质量系统的振动
正态分布情况下,超过标准差σx的±λ倍以外的概率P
λ
1
2
2.58
3
3.29
P 31.7% 4.6% 1% 0.3% 0.1%
1-P 68.3% 95.4% 99% 99.7% 99.9%
值明显下降。
|z/q| lg|z/q|
1
0
-1:1
-2:1
0.1 0.1
-1
1
10
频率比λ=ω/ω0
单质量系统位移输入与位移输出的幅频特29 性
第二十九页,共59页。
第三节 汽车振动系统的简化,单质量系统的振动
4.幅频特性曲线的讨论
3)高频段
lgλ
-1
0
1
10
1
|z/q| lg|z/q|
与ζ无关
➢悬架对输入位移起
➢渐近线斜率为-2:1。
➢“频率指数”为-2。
1
0
0.1 0.1
-2:1
1
频率比λ=ω/ω0
第二十三页,共59页。
-1 10
23
第三节 汽车振动系统的简化,单质量系统的振动
3.幅频特性曲线
lgλ
-1
0
1
10
1
|z/q| lg|z/q|
➢渐近线斜率为-1:1。
➢“频率指数”为-1。
1
0
-1:1
0.1 0.1
即
频率响应函数的幅角=-=
14
第十四页,共59页。
15
第十五页,共59页。
汽车理论第6章 汽车的平顺性2016

2016/4/12 汽车理论 wangjx@
16
a(t)
aw(t)
加权函数w(f )的滤波网络 根据IS02631-1:1997(E)设定系数
2016/4/12
汽车理论 wangjx@
四、平顺性的评价方法
(一)基本的评价方法
2. 对记录的加速度时间历程 间 程a(t)进行频谱分 行 谱 析得到功率谱密度函数 Ga f
汽车理论 Automotive theory
第六章
汽车的平顺性
内容概要
平顺性的基本概念 路面不平度输入 人体对振动的反应以及平顺性评价方法 平顺性研究基本方法、两自由度振动系 平顺性研究基本方法 两自由度振动系 统 主动悬架(了解)
2016/4/12
汽车理论 wangjx@
11
靠背
脚
2016/4/12
汽车理论 wangjx@
三、人体对振动的反应
人体对不同频率的振动敏感程度不同 1.
zs 最敏感的频率范围是4~12.5Hz
在4~8Hz频率范围,人的内脏器官产生共振 频率范围 人的内脏器官产生共振 8~12.5Hz频率范围,对人的脊椎系统影响很大
2016/4/12 汽车理论 wangjx@
wi是功率谱密度为0.1的 白噪声 (Simulink Si i 中的缺省值)
7
二、路面不平度输入
nc =0.01(cycle/m),车速为20m/s
10 10 10 10 10 10 10
-2 -3 -4 -5 -6 -7 -8
评价方法: 评价方法
根据乘员舒适程度评价
2016/4/12 汽车理论 wangjx@
4
16
a(t)
aw(t)
加权函数w(f )的滤波网络 根据IS02631-1:1997(E)设定系数
2016/4/12
汽车理论 wangjx@
四、平顺性的评价方法
(一)基本的评价方法
2. 对记录的加速度时间历程 间 程a(t)进行频谱分 行 谱 析得到功率谱密度函数 Ga f
汽车理论 Automotive theory
第六章
汽车的平顺性
内容概要
平顺性的基本概念 路面不平度输入 人体对振动的反应以及平顺性评价方法 平顺性研究基本方法、两自由度振动系 平顺性研究基本方法 两自由度振动系 统 主动悬架(了解)
2016/4/12
汽车理论 wangjx@
11
靠背
脚
2016/4/12
汽车理论 wangjx@
三、人体对振动的反应
人体对不同频率的振动敏感程度不同 1.
zs 最敏感的频率范围是4~12.5Hz
在4~8Hz频率范围,人的内脏器官产生共振 频率范围 人的内脏器官产生共振 8~12.5Hz频率范围,对人的脊椎系统影响很大
2016/4/12 汽车理论 wangjx@
wi是功率谱密度为0.1的 白噪声 (Simulink Si i 中的缺省值)
7
二、路面不平度输入
nc =0.01(cycle/m),车速为20m/s
10 10 10 10 10 10 10
-2 -3 -4 -5 -6 -7 -8
评价方法: 评价方法
根据乘员舒适程度评价
2016/4/12 汽车理论 wangjx@
4
第六章 汽车的平顺性(汽车理论)
一、汽车振动系统的简化
2.4个自由度模型
汽车对称于其纵轴线,且左、右车辙的不平度函数相等: 悬挂质量:车身+车架+车架上的总成 m2-2自由度 (垂直、俯仰) 减振器+悬架弹簧 非悬挂质量:车轮+车轴 m1-2自由度 (垂直)
两个系统动力学等效的条件
原系统车身对其 质心的回转半径
3.2个自由度模型
由表6-1上各轴向的轴加权系数可以看出: (1) 椅面输入点xs、ys、zs三个线振动的轴加权系数k=1, 是12个轴向中人体最敏感的,其余各轴向的轴加权系数均小 于0.8。 (2)另外IS02631—1:1997(E)标准还规定,当评价振动对 人体健康的影响时,就考虑xs、ys、zs这三个轴向,且xs、ys 两个水平轴向的轴加权系数取k=1.4,比垂直轴向更敏感。 (3)标准还规定靠背水平轴向xb、yb可以由椅面xs、ys水 平轴向代替,此时轴加权系数取k=1.4。 (4)因此,我国在修订的相应标准GB/T4970--1996《汽 车平顺性随机输入行驶试验方法》时,评价汽车平顺性就考 虑椅面xs、ys、zs这三个轴向。
三、汽车单自由度振动系统的传递特性
实际上,幅频特性是线性 系统对不同频率下输入正 弦波的振幅放大的倍数
原系统车身对其 质心的回转半径
一、汽车振动系统的简化
4.1个自由度模型 轮胎在低频区内5Hz以下,忽略轮胎的弹性与车轮的 质量。
是m2的坐标,是振 动系统的输出
q道路不平度,是时间函 数,振动系统的输入
单自由度振动系统的自由振动方程
单自由度振动有阻尼振动的解,图中说 明有阻尼振动是振幅逐渐减小的振动
道路不平度的时间功率谱密度函数
道路垂直速度的功率谱密度函数
道路垂直加速度的功率谱密度函数
汽车理论课件 第六章 汽车的平顺性 3.汽车振动系统的简化,单质量系统的振动
2π
e nT1
1 2
阻尼比越大,振幅衰减得越快
lnd 2π 1 2
1
1 4π2 / ln 2d
由实测的衰减振动曲线得到d,即可确定系统的阻尼比ζ。
17
n C 0 22
1
1 4π2 / ln 2d
18
汽车理论
第四十二讲
主讲教师:XXX
学时:48
第三节 汽车振动系统的简化,单质量系统的振动
单质量系统 自由振动
对车身质量运用牛顿第二定律,得微 分方程:
m2z Cz q Kz q 0
令2n C m2
02
K m2
z 2nz 02z 0
n C
0 2 m2K
ω0—振动系统固有圆频率;
ζ—阻尼比。
20
n C 0 2 m2K
0
K m2
d A1 A2
1
1 4π2 / ln 2d
Z(ω)与Q(ω) 的比值,可以确定频率响应函数 H jω 。 z ~q
➢汽车悬架系统阻尼比ζ大约为0.25,ωr比ω0只下降
了3%左右, r 0。
固有频率 0
K m2
f0
0
2π
1 2π
K m2
16
第三节 汽车振动系统的简化,单质量系统的振动
阻尼比ζ对衰减振动的影响
2)决定振幅的衰减程度
两个相邻的振幅A1与A2之比称为减振系数d
e d
A1
A2
Aent1 Aent1T1
对于大部分汽车,
= 0.8~1.2,即接
近1。当 = 1时
m2f
m2
2 y
aL
m2r
m2
2 y
bL
汽车理论__第6章汽车的平顺性
从1985年开始进行全面修订,于1997年公布了ISO2631—l 1997(E)《人体承受全身振动评价——第一部分:一般要求》
第二节 路面不平度的统计特性
把汽车近似作为线性系统处理时,掌握了输人的路 面不平度功率谱以及车辆系统的频响函数,就可以 求出各响应物理量的功率谱,用来分析振动系统参 数对各响应物理量的影响和评价平顺性。
第二节 路面不平度的统计特性
当W=2时,q(n)与l成正比, Gq(n) 是不平度幅值的 均方值谱密度,故Gq(n)又与不平度幅值的平方成正 比,所以不平度幅值q0大致与波长l成正比。
图上影线面积为原联邦德国1983年公路路面谱分布 范围,可以看出主要集中在A级,部分延伸到B、C 级之内。
到路面不平度的功率谱密度Gq(n)或方差d2q等统计特性参数。
作为车辆振动输入的路面不平度,主要采用路面功率谱密度描述其统 计特性
1984年国际标准化组织在文件ISO/TCl08/SC2N67中提出的“路面不平 度表示方法草案”
国内由长春汽车研究所起草制定的GB7031《车辆振动输入——路面平度 表示》标准
引言
研究平顺性的主要目的就是控制汽车振动系统的动 态特性,使振动的“输出”在给定工“输入”下不 超过一定界限,以保持乘员的舒适性。本章的基本 内容为:
1)人体对振动的反应和平顺性的评价。 2)振动“输入”——路面不平度的统计特性。 3)汽车振动系统的简化,系统频响特性和系统参数对 4)汽车平顺性的测试。
第二节 路面不平度的统计特性
第二节 路面不平度的统计特性
第二节 路面不平度的统计特性
第三节 汽车振动系统的简化, 单质量系统的振动
汽车振动系统的简化
第三节 汽车振动系统的简化, 单质量系统的振动
第二节 路面不平度的统计特性
把汽车近似作为线性系统处理时,掌握了输人的路 面不平度功率谱以及车辆系统的频响函数,就可以 求出各响应物理量的功率谱,用来分析振动系统参 数对各响应物理量的影响和评价平顺性。
第二节 路面不平度的统计特性
当W=2时,q(n)与l成正比, Gq(n) 是不平度幅值的 均方值谱密度,故Gq(n)又与不平度幅值的平方成正 比,所以不平度幅值q0大致与波长l成正比。
图上影线面积为原联邦德国1983年公路路面谱分布 范围,可以看出主要集中在A级,部分延伸到B、C 级之内。
到路面不平度的功率谱密度Gq(n)或方差d2q等统计特性参数。
作为车辆振动输入的路面不平度,主要采用路面功率谱密度描述其统 计特性
1984年国际标准化组织在文件ISO/TCl08/SC2N67中提出的“路面不平 度表示方法草案”
国内由长春汽车研究所起草制定的GB7031《车辆振动输入——路面平度 表示》标准
引言
研究平顺性的主要目的就是控制汽车振动系统的动 态特性,使振动的“输出”在给定工“输入”下不 超过一定界限,以保持乘员的舒适性。本章的基本 内容为:
1)人体对振动的反应和平顺性的评价。 2)振动“输入”——路面不平度的统计特性。 3)汽车振动系统的简化,系统频响特性和系统参数对 4)汽车平顺性的测试。
第二节 路面不平度的统计特性
第二节 路面不平度的统计特性
第二节 路面不平度的统计特性
第三节 汽车振动系统的简化, 单质量系统的振动
汽车振动系统的简化
第三节 汽车振动系统的简化, 单质量系统的振动
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
L aw20lg(aw/a0) a0参 考 加 速 度 均 方 根 值 , a0 = 10- 6m •s2
平顺性指标和人的感觉间的关系
第二节 路面不平度的统计特征
一、路面不平度的功率谱密度
1、随机信号的频谱分析
为了研究信号的 能量(或功率)分布, 并凸出信号频谱图中 的主频率,需要做功
q (I)
不
本章共有7节:
第一节 人体对振动的反应和平顺性的评价 第二节 路面不平度的统计特性 第三节 汽车振动系统的简化。单质量系统的振动 第四节 车身与车轮双质量系统的振动 第五节 双轴汽车的振动 第六节 “人体-座椅”系统的振动 第七节 汽车平顺性试验和数据处理
平顺性:保持汽车行驶过程中乘员所处的 振动环境具有一定舒适度的性能 ,并保持货物的完好无损。
路面不平度 8 级分类
路面等级
Gq(no)×10-6m2/m-1
no=0.1m-1
下限 几何平均值 上限
σ q×10-3m 0.011m-1<n<2.83m-1
下限 几何平均值 上限
A
8
16
32 2.69
3.81
5.38
B
32
64
128 5.38
7.61
10.77
C
128
256
512 10.77 15.23 21.53
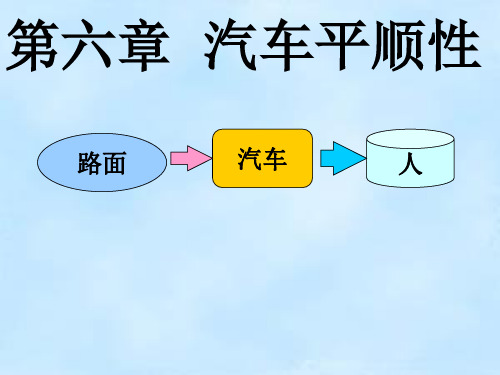
第ห้องสมุดไป่ตู้章 汽车平顺性
路面
汽车
人
本章基本思路
如何评价汽车的行驶平顺性?
几种重要的评价方法
对于振动的“输入”的描述 路面不平度的统计特性
路面不平度及功率谱密度
对汽车振动系统如何进行简化?
单质量系统的振动 车身与车轮双质量系统的振动 双轴汽车模型的振动
建立运动微分方程及系统“输入”对“输出” 的影响分析 汽车平顺性测试 汽车悬架参数设计的依据
4.路面不平度的功率谱密度
w
Gq(n) Gq(n0)nn0
式中
n—空间频率,m-1 n0—参考空间频率,0.1 m-1 Gq(n0)—参考空间频率n0下的功率谱密度,即路面不平度系数(m2/m-1) w—频率指数,一般取为2
1m,n 1 1
0.5m,n1 2
0.2m,n1 5
n 表 示 每 米 长 度 中 包 括 几 个 波 长
一、人体对振动的反应
机械振动对人体的影响,取决于振动的频率、强 度、作用方向和持续时间,而且每个人的心理与身 体素质不同,对振动的敏感程度也不同。
评价标准
ISO2631-1:1997(E) 《 人 体 承受全身 振动评价——第一部分:一般要求》 GB/T4970-1996《 汽 车 平 顺 性 随 机 输 入行驶试验方法》
用水准仪或路面计测量路面不平度,测量得到
的大量路面不平度数据用计算机处理,得到功率 谱密度Gq(n)或方差σ2q
w
Gq(n)Gqn (n01)nn0
速度功率谱密度:是
位移功率谱密度与频率二次 方乘积;
所考虑的振动 ISO2631-1 规 定
,舒适性评价时, 考虑座椅支承处的 3个线振动和3个角 振动,靠背和脚支 承处各3个线振动 ,共12个轴向振动 。健康影响评价时 ,仅考虑座椅支承 处的3个线振动xs、 ys、zs。
平顺性名词解释
1、轴加权系数 对不同方向振动,人体敏感度不一
样。该标准用轴加权系数描述这种敏感 度。 2、频率加权函数
评价方法:根据乘员舒适程度评价
汽车振动系统及其评价指标
振动
输入 系 统
汽车
评价 输出
指标
输入-振动系统-输出-评价指标
输 入:路面不平度、 车速。 振动系统:弹性元件、阻尼元件、质量。 输 出:悬挂质量或人体加速度、车轮动
载荷。 评价指标:人体对振动的响应、轮胎的接
地性。
第一节 人体对振动的反应和平顺性的评价
1
aV 08.0 5w2(f) Ga(f)df2
参阅教材图6-56“平顺性试验数 据的采集和处理”
3、同时考虑3个方向 3轴向xs、ys、zs 振动的总加权加速度均方根值为:
av(1.4axw )2(1.4ayw )2az 2w
4、有些“人体振动测量仪”采用加权振级Law,它与加 权加速度均方根值换算,按下式进行(参阅教材p250):
对不同频率的振动,人体敏感度也 不一样。例如,人体内脏在椅面z向振动 4-8Hz发生共振,8-12.5Hz对脊椎影响大 。椅面水平振动敏感范围在0.5-2Hz。标 准用频率加权函数w描述这种敏感度。
二、平顺性的评价方法
1、 按加速度加权均方根值评价。样本时间 T一般取120s。
均方根值 : a 1 T a2 (t)dt
功率谱密度的定义是单位频带内的“功率”(均方
值),因此功率谱密度所反映的是信号幅值的平方,
故频域结构特征更加明显。
3.路面不平度q(I)的功率谱密度Gq(n)的意义: Gq(n) 表示路面不平度q2(I)的平均值E[q2(I)]
的空间频率分布。 掌握了路面不平度q(I)的功率谱密度以及车辆
系统的频响函数。就可以求出响应量的功率谱, 用来分析振动系统对各响应物理量的影响和评价
平
I
度 函
路面纵向断面曲线 数
率谱分析。特别是对
于有明显的非确定性
因此,需要
从的统随计机的信角号度,出发,引进适合于具有随机性
质的谱分析方法,即功率谱分析方法。它是
傅里叶分析法和统计分析法两者结合起来考
2. 随机变量x(t)功率谱密度Gx(f)的意义:
Gx(f) 表示x(t)的平均功率E[x2(t)](均方值)在频率域的分布 (参阅教材p248)。
D
512 1024 2048 21.53 30.45 43.06
E 2048 4096 8192 43.06 60.90 86.12 F 8192 16384 32768 86.13 121.80 172.26 G 32768 65536 131072 1?2.26 243.61 344.52 H 131072 262144 524288 344.52 487.22 689.04
T0
a(t)是测试的加速度时间信号。
加权均方根值: aw
1 T
T 0
aw2 (t)dt
aw(t)是通过频率加权函数滤波网络后得到的加速度时间信 号。频率加权函数见表6-1。
频率加
a(t)
权滤波
aw(t)
网络
频率加权函数
椅面z向和脚x,y,z: 椅面x,y向和靠背y, z向 :
靠背x向 :
2、 对记录的加速度时间历程a(t)进行频谱分析得 到功率谱密度 G a ( f ) ,按下式计算:
平顺性指标和人的感觉间的关系
第二节 路面不平度的统计特征
一、路面不平度的功率谱密度
1、随机信号的频谱分析
为了研究信号的 能量(或功率)分布, 并凸出信号频谱图中 的主频率,需要做功
q (I)
不
本章共有7节:
第一节 人体对振动的反应和平顺性的评价 第二节 路面不平度的统计特性 第三节 汽车振动系统的简化。单质量系统的振动 第四节 车身与车轮双质量系统的振动 第五节 双轴汽车的振动 第六节 “人体-座椅”系统的振动 第七节 汽车平顺性试验和数据处理
平顺性:保持汽车行驶过程中乘员所处的 振动环境具有一定舒适度的性能 ,并保持货物的完好无损。
路面不平度 8 级分类
路面等级
Gq(no)×10-6m2/m-1
no=0.1m-1
下限 几何平均值 上限
σ q×10-3m 0.011m-1<n<2.83m-1
下限 几何平均值 上限
A
8
16
32 2.69
3.81
5.38
B
32
64
128 5.38
7.61
10.77
C
128
256
512 10.77 15.23 21.53
第ห้องสมุดไป่ตู้章 汽车平顺性
路面
汽车
人
本章基本思路
如何评价汽车的行驶平顺性?
几种重要的评价方法
对于振动的“输入”的描述 路面不平度的统计特性
路面不平度及功率谱密度
对汽车振动系统如何进行简化?
单质量系统的振动 车身与车轮双质量系统的振动 双轴汽车模型的振动
建立运动微分方程及系统“输入”对“输出” 的影响分析 汽车平顺性测试 汽车悬架参数设计的依据
4.路面不平度的功率谱密度
w
Gq(n) Gq(n0)nn0
式中
n—空间频率,m-1 n0—参考空间频率,0.1 m-1 Gq(n0)—参考空间频率n0下的功率谱密度,即路面不平度系数(m2/m-1) w—频率指数,一般取为2
1m,n 1 1
0.5m,n1 2
0.2m,n1 5
n 表 示 每 米 长 度 中 包 括 几 个 波 长
一、人体对振动的反应
机械振动对人体的影响,取决于振动的频率、强 度、作用方向和持续时间,而且每个人的心理与身 体素质不同,对振动的敏感程度也不同。
评价标准
ISO2631-1:1997(E) 《 人 体 承受全身 振动评价——第一部分:一般要求》 GB/T4970-1996《 汽 车 平 顺 性 随 机 输 入行驶试验方法》
用水准仪或路面计测量路面不平度,测量得到
的大量路面不平度数据用计算机处理,得到功率 谱密度Gq(n)或方差σ2q
w
Gq(n)Gqn (n01)nn0
速度功率谱密度:是
位移功率谱密度与频率二次 方乘积;
所考虑的振动 ISO2631-1 规 定
,舒适性评价时, 考虑座椅支承处的 3个线振动和3个角 振动,靠背和脚支 承处各3个线振动 ,共12个轴向振动 。健康影响评价时 ,仅考虑座椅支承 处的3个线振动xs、 ys、zs。
平顺性名词解释
1、轴加权系数 对不同方向振动,人体敏感度不一
样。该标准用轴加权系数描述这种敏感 度。 2、频率加权函数
评价方法:根据乘员舒适程度评价
汽车振动系统及其评价指标
振动
输入 系 统
汽车
评价 输出
指标
输入-振动系统-输出-评价指标
输 入:路面不平度、 车速。 振动系统:弹性元件、阻尼元件、质量。 输 出:悬挂质量或人体加速度、车轮动
载荷。 评价指标:人体对振动的响应、轮胎的接
地性。
第一节 人体对振动的反应和平顺性的评价
1
aV 08.0 5w2(f) Ga(f)df2
参阅教材图6-56“平顺性试验数 据的采集和处理”
3、同时考虑3个方向 3轴向xs、ys、zs 振动的总加权加速度均方根值为:
av(1.4axw )2(1.4ayw )2az 2w
4、有些“人体振动测量仪”采用加权振级Law,它与加 权加速度均方根值换算,按下式进行(参阅教材p250):
对不同频率的振动,人体敏感度也 不一样。例如,人体内脏在椅面z向振动 4-8Hz发生共振,8-12.5Hz对脊椎影响大 。椅面水平振动敏感范围在0.5-2Hz。标 准用频率加权函数w描述这种敏感度。
二、平顺性的评价方法
1、 按加速度加权均方根值评价。样本时间 T一般取120s。
均方根值 : a 1 T a2 (t)dt
功率谱密度的定义是单位频带内的“功率”(均方
值),因此功率谱密度所反映的是信号幅值的平方,
故频域结构特征更加明显。
3.路面不平度q(I)的功率谱密度Gq(n)的意义: Gq(n) 表示路面不平度q2(I)的平均值E[q2(I)]
的空间频率分布。 掌握了路面不平度q(I)的功率谱密度以及车辆
系统的频响函数。就可以求出响应量的功率谱, 用来分析振动系统对各响应物理量的影响和评价
平
I
度 函
路面纵向断面曲线 数
率谱分析。特别是对
于有明显的非确定性
因此,需要
从的统随计机的信角号度,出发,引进适合于具有随机性
质的谱分析方法,即功率谱分析方法。它是
傅里叶分析法和统计分析法两者结合起来考
2. 随机变量x(t)功率谱密度Gx(f)的意义:
Gx(f) 表示x(t)的平均功率E[x2(t)](均方值)在频率域的分布 (参阅教材p248)。
D
512 1024 2048 21.53 30.45 43.06
E 2048 4096 8192 43.06 60.90 86.12 F 8192 16384 32768 86.13 121.80 172.26 G 32768 65536 131072 1?2.26 243.61 344.52 H 131072 262144 524288 344.52 487.22 689.04
T0
a(t)是测试的加速度时间信号。
加权均方根值: aw
1 T
T 0
aw2 (t)dt
aw(t)是通过频率加权函数滤波网络后得到的加速度时间信 号。频率加权函数见表6-1。
频率加
a(t)
权滤波
aw(t)
网络
频率加权函数
椅面z向和脚x,y,z: 椅面x,y向和靠背y, z向 :
靠背x向 :
2、 对记录的加速度时间历程a(t)进行频谱分析得 到功率谱密度 G a ( f ) ,按下式计算: