姿态测量方法
室外跑步姿态测试方法
以下是室外跑步姿态测试的几种方法:
1. 跑者之间或者请跑步教练用肉眼评估:这是一种定性评价方法,需要有经验的跑步教练且主观性较
大。
2. 利用手机具备的慢动作摄像功能,拍摄跑姿。
简单一点的话直接慢放进行评估,复杂一点的话可以下
载一个动作分析app,将视频导入其中进行分析。
这时就可以利用app中角度等测量功能评估跑姿关键动作,这种跑姿评估方式专业性要求更高,往往需要专业人员才能完成。
3. 在专业运动生物力学实验室,借助高科技设备比如测力台、三维捕捉等先进技术进行测试。
这种方式
涉及复杂的数学建模,繁琐的现场测试,专业的后期数据处理才能实现,一般用于科学研究,普通大众难以体验,或者说国内大学和研究结构基本都不提供这类服务。
4. 利用可穿戴设备进行跑姿评估:目前市面上可以评估跑姿的可穿戴设备越来越多,有的经过多年应用
发展成为成熟产品,大大方便了跑者评估自身跑姿。
姿态测量方法
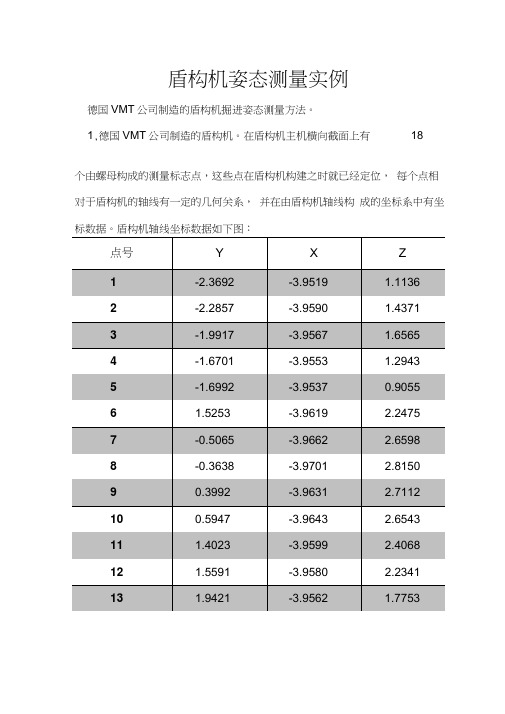
盾构机姿态测量实例德国VMT公司制造的盾构机掘进姿态测量方法。
1,德国VMT公司制造的盾构机。
在盾构机主机横向截面上有18个由螺母构成的测量标志点,这些点在盾构机构建之时就已经定位,每个点相对于盾构机的轴线有一定的几何关系,并在由盾构机轴线构成的坐标系中有坐标数据。
盾构机轴线坐标数据如下图:2测量标志点对于德国VMT公司制造的盾构机上有18个点,单只要测出其中任意3个点(最好取左中右3个点)的实际三维坐标,就可以计算出盾构机的姿态,在进行测量时,当盾首中心为坐标原点,其三维坐标为(0,0,0)盾首与盾尾的距离为4.34m,盾尾中心的三维坐标为(一4.34, 0,0)。
同样在该坐标系中,从表中可以查出3, 8,15三个点的三维坐标分别为(X1, Y1, Z1),(X2,Y2,Z2 ,(X3, Y3, Z3,).由此可以列出利用该三个点计算盾首中心的三维坐标(X首,Y首,Z首)和盾尾中心三维坐标(X尾Y尾Z尾)的两组三元二次方程组的数学表达方式。
计算盾首中心三维坐标数学方程组为:2 2 2(X1 - X 首)+ (Y1 - Y 首)+ (Z1- Z 首)2 2 2=(-3.9567)+ (- 1.9917)+ (1.6565)2 2 2(X2 - X 首)+ (Y2 - Y 首)+ (Z2 - Z 首)2 2 2=(-3.9701)+ (- 0.3638)+ (2.8150)(X3- X 首)2+ (Y3 - 丫首)2+(2Z3 - Z 首)222 = ( - 3.9560) + ( 2.3056) +(1.1695)计算盾尾中心三维坐标数学方程组为222(X1- X 尾)+ ((Y1- Y尾) +Z1 -Z尾)222=(- 3.9567 + 4.34) +( - 1.9917 ) + ( 1.6565)222(X2- X 尾)+ ((Y2 - Y 尾) +Z2 -Z尾)222=(- 3.9701 + 4.34) +( - 0.3638) + (2.8150)2 (X3- X 尾) +2( Y3- Y 尾) +( Z32-Z尾)222= ( - 3.9560 + 4.34) + (2.3056) + ( 1.1695)上述3.8.15 三个点是在以盾构机轴线构成的坐标系中,盾首中心为坐标原点(0,0,0)盾尾为(-34.4,0,0)的条件下的坐标系。
光电经纬仪姿态测量精度室内检测方法

光电经纬仪姿态测量精度室内检测方法摘要:光电经纬仪的姿态测量精度是指光电经纬仪在规定的加速度运动状态下,对运动目标的实时测量值与目标空间方向真值的差值,是衡量光电经纬仪测量精度的重要技术指标之一。
本文通过理论分析,为光电经纬仪的姿态测量精度提供了一种室内测量方法。
关键词:光电经纬仪姿态测量精度;室内检测方法光电经纬仪是经纬仪与光电探测装置相结合的产物。
它是一种对运动目标参数(位置、速度等)进行自动跟踪和实时测量,同时记录运动目标姿态的光电测量装置。
目前光电经纬仪确定目标最常用的方法是姿态测量法,因此研究光电经纬仪对目标姿态的测量精度具有十分重要的意义。
一、光电经纬仪姿态测量工作原理光电经纬仪机架为3轴(垂直轴、水平轴、视准轴)地平装置。
框架3的轴相互垂直,水平轴和准直轴可以围绕垂直轴在水平面内旋转。
光电检测装置安装在水平轴上,其主光轴为准直轴,与水平轴垂直,可绕水平轴在垂直面内旋转。
垂直轴和水平轴分别装有轴角编码器。
当视觉轴绕垂直轴旋转时,垂直轴编码器读出的角度称为方位角,当视觉轴绕水平轴旋转时,水平轴编码器读出的角度称为俯仰角。
这样,只要准直轴对准目标,就可以得到光轴指向目标的方位角和俯仰角。
为了保证精密检测的可靠性,在检测系统中采用了传统的T型架,采用水平光管和大角度平行光管。
检测系统主要包括T型架、水平平行光管、大角度平行光管、隔离型地环、高精度T4经纬仪、高精度水准仪和经纬仪。
将被测经纬仪放在测量基座上,调整到水平管和大角度管同时测量的位置,然后将经纬仪调平(要求调平精度小于1角秒),调平后用被测经纬仪测量水平光管和大角度光管经纬仪,并通过测量后的数据处理,在摇摆状态下进行小角度干扰测量,使大角度平行光管的星点目标在测量架上记录相对运动轨迹。
通过图像存储,记录星点目标的运动轨迹,通过后处理得到一组大角度光管的动态测量值。
根据光电经纬仪等摄像测量设备拍摄的目标数字图像,利用图像处理技术,确定目标图像的二维中心轴,即被测目标中心轴在目标表面上的投影。
成人身体姿态测试指标与方法
成人身体姿态测试指标与方法
成人身体姿态测试主要关注的是人体在直立姿势下的形态和位置。
以下是具体的指标和方法:
1. 直立姿势的评定:
前面观:从前面看,双眼应平视前方,两侧耳屏上缘和眶下缘中点应处于同一水平面上,左、右髂前上棘应处于同一水平面上。
后面观:从后面看,头后枕部、脊柱和两足跟夹缝线都应处于一条垂直线上;与脊柱相邻的两肩和两侧髂嵴对称地处于垂直脊柱的水平线上。
侧面观:从侧向看,耳屏、肩峰、股骨大转子、膝、踝应五点一线,位于一条垂直线上。
同时可见脊柱的4个正常生理弯曲,即向前凸的颈曲;向后凸的胸曲;向前凸的腰曲和向后凸的骶曲。
颈曲和腰曲最大,胸曲次之,骶曲最小。
2. 直立姿势检查:标准直立姿势是人体测量的基本姿势。
从背面观,头、颈、脊柱和两足跟间应在同一垂直线上,同时两肩峰的高度、两髂嵴的高度应一致。
从侧面观,头顶、耳屏前、肩峰、股骨大转子、腓骨小头和外踝尖各点应在同一垂直线上,脊柱呈正常生理弯曲。
以上信息仅供参考,如果想要了解更多信息,建议查阅相关书籍或咨询专业医生。
姿态测量分类
姿态测量分类
姿态测量主要可以分为以下几种类型:
1.视觉姿态测量:这种方法是通过摄像机或其他视觉传感器来测
量物体的姿态。
它可以提供高精度的测量结果,但是其安装和使用都比较复杂,且成本较高。
在实际应用中,视觉姿态测量可能会受到许多因素的影响,从而产生误差,例如镜头的几何畸变、图像采集过程中的噪声等。
2.非视觉姿态测量:这种方法是通过使用加速度计、陀螺仪、磁
力计等传感器来测量物体的姿态。
相比于视觉姿态测量,它的安装和使用比较简单,成本也较低。
但是,其测量精度一般会比视觉测量要低。
3.惯性/视觉融合姿态测量:为了提高姿态测量的精度,可以采用
融合测量的方法,即将视觉测量和非视觉测量结合起来。
这种方法可以充分利用两种测量方式的优点,从而获得更高精度的测量结果。
此外,根据姿态敏感器的不同,姿态测量还可以分为太阳敏感器、恒星敏感器、地球敏感器和惯性陀螺等。
其中,惯性陀螺是最常用的姿态测量部件,它具有较高的瞬时姿态测量精度,但长时间使用可能会产生较大的漂移误差。
对于精度要求较高的飞行器,星敏感器则有着不可替代的作用,其测量精度普遍高于其他敏感器。
协作机器人技术的姿态测量与校正技巧

协作机器人技术的姿态测量与校正技巧随着科技的不断进步,协作机器人技术越来越受到关注和应用。
协作机器人是指能够和人类进行安全、高效合作的机器人系统,其主要特点是能够与人类共享任务空间,并且能够感知和适应人类的动作和意图。
在实际应用中,协作机器人的姿态测量和校正是至关重要的技术,它直接影响机器人与人类的协作效果和精度。
本文将介绍协作机器人技术中的姿态测量与校正技巧。
姿态测量是指对协作机器人的姿态(即位置和姿态)进行精确测量的过程。
姿态测量对于协作机器人来说至关重要,因为它直接影响机器人在执行任务过程中的准确性和稳定性。
在协作机器人技术中,常用的姿态测量方法包括传感器测量、视觉测量和惯性测量等。
传感器测量是最常用的姿态测量方法之一。
通过安装各种传感器,如激光测距传感器、力传感器和陀螺仪等,可以实时感知和测量机器人的位置和姿态。
这些传感器能够提供准确的测量结果,并且具有较高的稳定性和精度。
然而,传感器测量往往受到环境干扰和噪声的影响,因此需要一定的信号处理和滤波算法对测量结果进行优化和修正。
视觉测量是另一种常用的姿态测量方法。
通过安装摄像头或激光雷达等设备,机器人能够实时感知周围环境并测量自身的位置和姿态。
视觉测量具有非接触、无损和高精度等优点,因此在协作机器人技术中得到了广泛应用。
然而,视觉测量的结果往往受到光照条件、背景干扰和目标遮挡等因素的影响,因此需要进行图像处理和计算机视觉算法的优化和改进。
惯性测量是基于惯性传感器的姿态测量方法。
通过安装加速度传感器和陀螺仪等设备,协作机器人可以感知和测量自身的加速度和角速度,从而推算出机器人的位置和姿态。
惯性测量具有快速、实时和高精度的优点,因此在协作机器人技术中得到了广泛应用。
然而,惯性测量的结果往往受到传感器漂移和噪声等因素的影响,因此需要进行数据融合和滤波算法的优化和改进。
除了姿态测量外,姿态校正是实现协作机器人精确运动的关键技术之一。
姿态校正是指对机器人的姿态进行调整和校正,以提高机器人位置和姿态的准确性和稳定性。
三个点姿态计算方法
三个点姿态计算方法
一、点姿态的测量方法
1.张氏点姿态测量方法
张氏点姿态测量方法是一种经典的测量方法,早在20世纪50年代就被提出。
根据张氏点姿态测量方法,可以使用一个标定物来模拟空间上的一个点。
首先,需要将标定物放置到空间点的位置,然后对标定物进行三维测量,可以得到准确的姿态坐标。
另外,张氏点姿态测量方法也需要采用测量仪器。
使用测量仪器可以精确测量出空间点各个坐标,包括x、y、z三轴坐标,半径角r、偏转角φ、仰角θ,以及其他重要坐标,从而准确计算出空间点的姿态坐标。
2.三点定向测量方法
三点定向测量方法是一种相对复杂的测量方法。
它主要依靠三个测量点的坐标信息来确定空间点的姿态坐标。
首先,对三个测量点进行精确的测量,得出它们的坐标信息。
其次,根据三个测量点的坐标信息,计算出空间点的姿态坐标。
最后,进行迭代计算,进一步优化空间点的姿态坐标。
3.仿射变换法
仿射变换法主要用于变换两组坐标,以使其之间的关系保持一致。
它可以用来测量空间点的姿态坐标,以及其他坐标信息。
首先,根据仿射变换模型,对两组坐标进行仿射变换,从而求出变换矩阵。
其次,根据变换矩阵,计算出空间点的姿态坐标。
如何进行建筑物姿态测量

如何进行建筑物姿态测量建筑物姿态测量是指通过测量建筑物的倾斜角度、旋转角度以及位移运动等参数来确定建筑物是否处于平衡状态或者检测建筑物是否发生变形的技术手段。
这项技术在工程施工、结构监测和地震研究等领域都有广泛的应用。
本文将从测量原理、常用仪器和技术、测量过程及数据处理等方面,探讨如何进行建筑物姿态测量。
一、测量原理建筑物姿态测量的原理主要基于几何和物理原理。
通过建筑物的倾斜角度、旋转角度和位移运动等参数,可以反映建筑物的力学性能和结构稳定性。
其中,倾斜角度可以通过水平仪、倾斜传感器等设备进行测量;旋转角度和位移运动可以通过全站仪、测距仪、激光扫描仪等高精度测量设备来实现。
二、常用仪器和技术1. 水平仪:水平仪是一种简单常用的测量设备,通过利用重力和液体表面的平衡原理,来测量物体的水平和垂直姿态。
水平仪的测量精度较低,适用于一些简单和低精度的测量任务。
2. 倾斜传感器:倾斜传感器是一种专业用于测量倾斜角度的仪器。
它一般采用MEMS(微机电系统)技术,通过测量微小变形来反映物体的倾斜角度。
倾斜传感器具有高精度、小尺寸和低功耗等特点,适用于各类建筑物姿态测量任务。
3. 全站仪:全站仪是一种高精度测量设备,可以同时测量角度、距离和高差等参数。
全站仪一般通过激光技术来测量,并且可以与计算机进行联接,实现自动化测量和数据处理。
全站仪广泛应用于建筑、土木工程和测绘等领域,可以实现建筑物姿态的快速测量和高精度分析。
4. 激光扫描仪:激光扫描仪是一种利用激光束扫描建筑物表面,获取点云数据的设备。
通过对采集到的点云数据进行三维重建和空间分析,可以获取建筑物的姿态、形变和结构等信息。
激光扫描仪具有非接触式、高精度和高效率等特点,已经成为建筑物姿态测量的一种重要工具。
三、测量过程建筑物姿态测量的过程一般包括目标选择、仪器设置、数据采集和数据处理等步骤。
在实际测量中,首先需要确定姿态测量的目标,即需要测量的建筑物或结构。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
盾构机姿态测量实例
德国VMT公司制造的盾构机掘进姿态测量方法。
1,德国VMT公司制造的盾构机。
在盾构机主机横向截面上有18个由螺母构成的测量标志点,这些点在盾构机构建之时就已经定位,每个点相对于盾构机的轴线有一定的几何关系,并在由盾构机轴线构成的坐标系中有坐标数据。
盾构机轴线坐标数据如下图:
2 测量标志点
对于德国VMT公司制造的盾构机上有18个点,单只要测出其中任意3个点(最好取左中右3个点)的实际三维坐标,就可以计算出盾构机的姿态,在进行测量时,当盾首中心为坐标原点,其三维坐标为(0,0,0)盾首与盾尾的距离为4.34m,盾尾中心的三维坐标为(—4.34,0,0)。
同样在该坐标系中,从表中可以查出3,8,15三个点的三维坐标分别为(X1,Y1,Z1),(X2,Y2,Z2),(X3,Y3,Z3,) .由此可以列出利用该三个点计算盾首中心的三维坐标
(X首,Y首,Z首)和盾尾中心三维坐标(X尾Y尾Z尾)的两组三元二次方程组的数学表达方式。
计算盾首中心三维坐标数学方程组为:
(X1−X首)2
+(Y1−Y首)2+(Z1−Z首)2
=(−3.9567)2+(−1.9917)2+(1.6565)2
(X2−X首)2
+(Y2−Y首)2+(Z2−Z首)2
=(−3.9701)2+(−0.3638)2+(2.8150)2
(X3−X首)2
+(Y3−Y首)2+(Z3−Z首)2
=(−3.9560)2+(2.3056)2+(1.1695)2计算盾尾中心三维坐标数学方程组为:
(X1−X尾)2
+(Y1−Y尾)2+(Z1−Z尾)2
=(−3.9567+4.34)2+(−1.9917)2+(1.6565)2
(X2−X尾)2
+(Y2−Y尾)2+(Z2−Z尾)2
=(−3.9701+4.34)2+(−0.3638)2+(2.8150)2
(X3−X尾)2
+(Y3−Y尾)2+(Z3−Z尾)2
=(−3.9560+4.34)2+(2.3056)2+(1.1695)2
上述3.8.15三个点是在以盾构机轴线构成的坐标系中,盾首中心为坐标原点(0,0,0)盾尾为(-34.4,0,0)的条件下的坐标系。
当盾构掘进过程中实测出该三个点的某一里程的大地坐标非别为
X1=45336.775,X2=45336.610,X3=45336.461
Y1=29534.236,Y2=29535.846,Y3=29538.525
Z1=-1.434 Z2=-0.236 Z3=-1.885
把以上数据代入第一组方程组,可解算出盾首中心在某一里程的大地三维坐标:
X首=45340.608,Y首=29536.538,Z首=-2.975
在该里程上盾首中心的设计大地三维坐标为:
X首=45340.610,Y首=29536.520,Z首=-2.945
由此得到三维坐标较差:
△X=-2mm,△Y=18mm, △Z=-30mm
则可计算出盾首中心左右上下偏差,其分别为:
+(−2)2+182=18mm (正号标示偏右),-30mm(负号标示偏下)
把以上数据带入第二组方程组,可解算出盾尾中心在某一里程的大地三维坐标:
X尾=45336.280,Y尾=29536.209,Z尾=-3.083
在该里程上盾尾中心的设计三维坐标为:
X尾=45336.282,Y尾=29536.192,Z尾=-3.055
同样由此得出三维坐标较差:
△X=-2mm,△Y=17mm,△Z=-28mm
则可计算出盾尾中心的左右上下偏差,其分别为:
+(−2)2+172=17mm (正号表示偏右),-28mm(负号表示偏下)
同时可计算出盾构机的坡度:
【(-2.975)-(-3.083)】/4.34=+2.5%
从以上数据可以得知,在与对应里程上盾首中心和盾尾中心设计的三维坐标比较后,就可以得出盾构机轴线和设计轴线的左右偏差值和上下偏差值,以及盾构机的坡度,这就是盾构机的姿态。
当然,如果盾构机没有预先设置的标志,可自行设计观测点标志,通过测量和计算这些点与盾构机几何结构的关系后,便可依照上述方法,根据测量数据计算出任意时刻和任意里程出的盾构机姿态。