第5章 拓扑控制资料讲解
第5章 拓扑控制

第五章 拓扑控制
3.网络生命期 网络生命期有多种定义。
一般定义:直到死亡节点的百分比低于某个阈值时的持续时间。
另一种定义:对网络的服务质量的某种度量的来定义。可以认为网络只有 在满足一定的覆盖质量、连通质量、某个或某些其他服务质量时才是存活的。
第五章 拓扑控制
5.干扰和竞争 ◆减小通信干扰、减少MAC层的竞争和延长网络的生命期基本上是一致的:
功率控制可以调节发射范围,睡眠调度可以调节工作节点的数量。
这些都能改变1跳邻居节点的个数(也就是与它竞争信道的节点数)。 ◆对于功率控制,网络无线信道竞争区域的大小与节点的发射半径r成正比, 减小r就可以减少竞争。 ◆睡眠调度也可以通过使尽可能多的节点睡眠来减小干扰和减少竞争。
◆特点:在节点分布均匀的情况下,具有较好的性能。但是,一个相对孤 立的节点会导致所有的节点使用很大的发射功率,所以在节点分布不均的情 况下,它的缺陷是明显的。 ◆Kawadia 和Kumar 提出了改进算法,但其主要缺陷是开销太大。
第五章 拓扑控制
(2)基于节点度的功率控制
◆基本思想是:给定节点度的上限和下限,每个节点动态地调整自己的发射 功率,使得节点的度数落在上限和下限之间。 ◆缺点:一般难以保证网络的连通性。 ◆具有代表性算法:柏林工业大学的Kubisch 等人提出的LMA 和LMN[26]等。
基于方向的算法需要可靠的方向信息,因而需要很好地解决到达角度问题, 节点需要配备多个有向天线,因而对传感器节点提出了较高的要求。
第五章 拓扑控制
(4)基于邻近图的功率控制
河北师大点集拓扑第五章教案
河北师大点集拓扑第五章教案一、教学内容1. 5.1节:拓扑空间的定义及基本性质。
2. 5.2节:开集、闭集、边界、内部和外部等概念。
3. 5.3节:几种特殊的拓扑空间,如离散拓扑、平凡拓扑、积拓扑等。
二、教学目标1. 理解拓扑空间的基本概念,掌握拓扑空间的基本性质。
2. 学会运用开集、闭集、边界等概念分析问题,培养空间想象力。
3. 掌握几种特殊的拓扑空间的性质,提高解决问题的能力。
三、教学难点与重点教学难点:拓扑空间的概念,开集、闭集、边界等概念的理解。
教学重点:拓扑空间的性质,特殊拓扑空间的性质及应用。
四、教具与学具准备1. 教具:黑板、粉笔、多媒体设备。
2. 学具:教材、笔记本、文具。
五、教学过程1. 导入:通过讲解实际生活中的例子,引入拓扑空间的概念。
2. 知识讲解:(1)讲解5.1节,让学生理解拓扑空间的定义及基本性质。
(2)讲解5.2节,让学生掌握开集、闭集、边界等概念。
(3)讲解5.3节,让学生了解几种特殊的拓扑空间。
3. 例题讲解:通过讲解典型例题,巩固所学知识。
4. 随堂练习:布置相关练习题,让学生及时巩固所学知识。
六、板书设计1. 拓扑空间的定义及基本性质。
2. 开集、闭集、边界等概念。
3. 几种特殊的拓扑空间及其性质。
七、作业设计1. 作业题目:(1)证明:离散拓扑是拓扑空间。
(3)讨论:平凡拓扑与离散拓扑的关系。
2. 答案:(1)见教材习题5.11。
(2)内部:A,外部:R^2A,边界:A的边界为空集。
(3)见教材习题5.32。
八、课后反思及拓展延伸1. 反思:本节课学生对拓扑空间的概念和性质掌握程度如何?对例题和随堂练习的完成情况如何?(1)如何判断两个拓扑空间是否同构?(2)拓扑空间中的连通性、紧性等概念如何理解?(3)拓扑空间的分类及其应用。
重点和难点解析:一、教学难点与重点的关注细节1. 拓扑空间的概念理解2. 开集、闭集、边界等概念的深入理解3. 特殊拓扑空间的性质及应用4. 例题讲解和随堂练习的设计二、重点和难点解析1. 拓扑空间的概念理解拓扑空间的定义是课程的核心,需要强调它是对“开集”的抽象描述,不同于一般的度量空间。
无线传感器网络中的拓扑控制方法应用教程

无线传感器网络中的拓扑控制方法应用教程无线传感器网络(Wireless Sensor Networks, WSN)是一种由大量节点组成的网络,节点通过无线通信进行数据传输和协作。
拓扑控制方法是在无线传感器网络中建立和维护网络拓扑结构的技术手段。
本文将介绍无线传感器网络中的拓扑控制方法及其在实际应用中的教程。
拓扑控制方法是无线传感器网络中的一项重要技术,通过调整网络节点之间的连接关系,可以优化网络性能、延长网络寿命和提高数据传输效率。
下面将介绍几种常见的拓扑控制方法及其应用教程。
第一种拓扑控制方法是基于链式结构的拓扑控制。
链式结构是无线传感器网络中常用的一种拓扑结构,节点之间按照一定的顺序连接成链条状。
链式结构可以减少节点之间的通信开销,改善网络传输效率。
在实际应用中,可以通过调整节点的放置位置,优化链式结构的性能。
例如,可以选择合适的节点密度和节点间距离,使链式结构的稳定性和可靠性更好。
第二种拓扑控制方法是基于树状结构的拓扑控制。
树状结构是一种分层和有序的网络拓扑结构,具有较好的可扩展性和有效的数据传输路径。
在无线传感器网络中,可以使用分层式路由协议构建树状结构,并通过调整树的深度和广度来控制网络拓扑。
树状结构的拓扑控制方法可以提高网络的稳定性和可靠性,适用于大规模的无线传感器网络。
第三种拓扑控制方法是基于集群结构的拓扑控制。
集群结构是一种将网络节点分组为多个独立的集群,每个集群由一个簇首节点和一组从属节点组成的拓扑结构。
集群结构可以提高网络的吞吐量和能源效率,降低网络通信开销。
在实际应用中,可以根据网络的特点和需求,选择合适的集群化算法和簇首选择策略,优化集群结构的性能。
除了以上介绍的几种常见的拓扑控制方法,还有其他一些拓扑控制方法在无线传感器网络中得到广泛应用,如基于覆盖率的拓扑控制、基于最小生成树的拓扑控制等。
这些方法都可以根据具体需求和应用场景进行选择和调整,以达到最佳的网络性能。
在实际应用中,进行拓扑控制需要注意以下几个方面。
河北师大点集拓扑课件第五章

河北师大点集拓扑课件第五章一、教学内容本节课我们将学习《点集拓扑》教材第五章的内容,主要涉及拓扑空间的连通性及其性质。
具体包括连通性的定义、性质及其应用,本章的目的是让学生理解并掌握连通性的概念,学会判断不同拓扑空间连通性的方法。
二、教学目标1. 让学生理解并掌握连通性的定义,能够正确运用到实际问题中。
2. 培养学生运用连通性的性质分析、解决拓扑空间问题的能力。
3. 培养学生的空间想象力和逻辑思维能力。
三、教学难点与重点1. 教学难点:连通性的性质及其应用。
2. 教学重点:连通性的定义、判断方法。
四、教具与学具准备1. 教具:多媒体课件、黑板、粉笔。
2. 学具:教材、笔记本、铅笔。
五、教学过程1. 实践情景引入(5分钟)利用多媒体课件展示一些具有连通性的实际例子,如地球表面的地图、电路图等,引导学生思考这些例子中的共同特征。
2. 理论知识讲解(10分钟)讲解连通性的定义、性质,通过例题讲解,让学生理解并掌握连通性的判断方法。
3. 例题讲解(10分钟)出示例题,引导学生运用连通性的定义和性质进行分析,讲解解题思路和步骤。
4. 随堂练习(5分钟)出示与例题相似的问题,让学生独立完成,巩固所学知识。
5. 互动讨论(5分钟)学生之间相互讨论解题思路,教师巡回指导,解答学生的疑问。
7. 作业布置(5分钟)布置课后作业,强调作业的重要性,要求学生按时完成。
六、板书设计1. 连通性的定义2. 连通性的性质3. 判断连通性的方法4. 例题及解题步骤七、作业设计1. 作业题目:(2)证明:若X是连通的,Y是连通的,则X×Y也是连通的。
2. 答案:(1)①连通;②不连通。
(2)略。
八、课后反思及拓展延伸1. 课后反思:本节课学生对连通性的理解和应用方面有所提高,但在判断连通性的方法上还存在一定困难,需要在今后的教学中加强训练。
2. 拓展延伸:鼓励学生课后阅读教材相关章节,了解连通性的其他性质和应用,提高自身拓扑空间思维能力。
网络安全管理制度中的网络拓扑与访问控制
网络安全管理制度中的网络拓扑与访问控制网络安全在现代社会的重要性日益凸显,企业和组织需要建立完善的网络安全管理制度来保护信息资产的安全。
网络拓扑与访问控制是网络安全管理制度中的重要组成部分,它们在保障网络安全方面起到关键作用。
本文将就网络拓扑与访问控制的定义、重要性以及实施步骤进行深入探讨。
一、网络拓扑的定义与作用网络拓扑是指网络中各个节点之间的连接方式和拓扑结构,它是网络安全的基础。
不同的网络拓扑结构具有不同的特点和适用环境,组织需要根据具体情况选择适合自身的网络拓扑结构。
常见的网络拓扑结构包括星型拓扑、总线拓扑、环形拓扑和网状拓扑等。
星型拓扑是将所有节点都连接到一个中央节点,适用于小型网络。
总线拓扑是将所有节点都连接到一条共享介质上,适用于中小型网络。
环形拓扑是将每个节点都连接到相邻的两个节点,适用于小型网络。
网状拓扑是通过多条链路连接各个节点,适用于大型网络。
选择适合的网络拓扑结构对于网络的安全管理至关重要。
不同的拓扑结构可能存在不同的安全风险,组织需要根据拓扑结构的特点采取相应的安全措施。
二、访问控制的定义与作用访问控制是指通过合理的权限设置和身份验证,确保只有授权的用户或设备可以访问网络资源和系统信息。
访问控制的目的是防止未经授权的访问和潜在的网络攻击。
访问控制分为两个层面,即身份验证和授权。
身份验证是确认用户或设备的身份,确保用户或设备是合法的。
常见的身份验证方式包括用户名和密码、指纹等生物特征识别技术。
授权是确定用户或设备能够访问哪些资源和执行哪些操作。
授权可以基于角色、权限组或个人进行设置,确保用户或设备仅拥有必要的权限。
通过访问控制,组织可以限制对敏感数据的访问、减少内部员工的错误操作和滥用权限行为,提高网络的安全性。
三、网络拓扑与访问控制的实施步骤1. 网络拓扑设计:根据组织的需求和规模,选择合适的网络拓扑结构。
在设计拓扑结构时,需要考虑网络的可用性、性能和安全性。
2. 网络设备配置:配置网络设备,包括路由器、交换机和防火墙等。
开关电源常用拓扑结构图文解释
开关电源常用拓扑结构图文解释第一篇:开关电源常用拓扑结构图文解释开关电源常用拓扑结构开关变换器的拓扑结构是指能用于转换、控制和调节输入电压的功率开关器件和储能器件的不同配置。
开关变换器的拓扑结构可以分为两种基本类型:非隔离型和隔离型。
变换器拓扑结构是根据系统造价、性能指标和输入/输出负载特性等因素选定。
1、非隔离型开关变换器一,Buck变换器,也称降压变换器,其输入和输出电压极性相同,输出电压总小于输入电压,数量关系为:其中Uo为输出电压,Ui为输入电压,ton为开关管一周期内的导通时间,T为开关管的导通周期。
降压变换器的电路模式如图2所示。
工作原理是:在开关管VT导通时,输入电源通过L平波和C滤波后向负载端提供电流;当VT关断后,L通过二极管续流,保持负载电流连续。
二,Boost变换器,也称升压变换器,其输入和输出电压极性相同,输出电压总大于输入电压,数量关系为:。
升压变换器的电路模式如图3所示。
工作原理是:在VT导通时,电流通过L平波,输入电源对L充电。
当VT关断时,电感L及电源向负载放电,输出电压将是输入电压加上输入电源电压,因而有升压作用。
三,Buck-Boost变换器,也称升降压变换器,其输入输出电压极性相反,既可升压又可降压,数量关系为:。
升降压变换器的电路模式如图4所示。
工作原理是:在开关管VT导通时,电流流过电感L,L储存能量。
在VT关断时,电感向负载放电,同时向电容充电。
四,Cuk变换器,也称串联变换器,其输入输出电压极性相反,既可升压又可降压,数量关系为:。
Cuk变换器的电路模式如图5所示。
工作原理是:在开关管VT 导通时,二极管VD反偏截止,这时电感L1储能;C1的放电电流使L2储能,并向负载供电。
在VT关断时,VD正偏导通,这时输入电源和L1向C1充电;同时L2的释能电流将维持负载电流。
2、隔离型开关电源变换器一,推挽型变换器,其变换电路模型如图6所示。
工作过程为:VT1和VT2轮流导通,这样将在二次侧产生交变的脉动电流,经过VD1和VD2全波整流转换为直流信号,再经L、C滤波,送给负载。
中科院WSN讲义-拓扑控制p6v2011
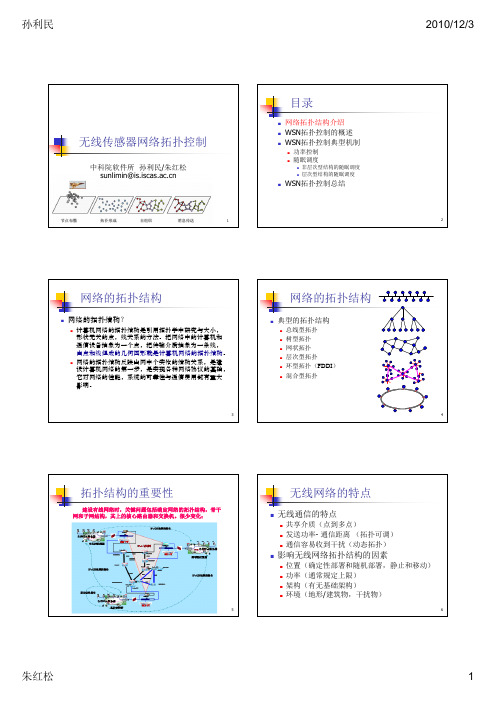
部署方式
确定性部署 随机性部署 有基础架构 无基础架构 移动/静止 节点位置 发送功率
12
网络结构
节点类型
拓扑结构核心影响因素
朱红松
2
孙利民
2010/12/3
WSN拓扑控制
WSN拓扑控制
Why 拓扑控制
在由无线传感器网络生成的网络拓扑中,可以直接通 信的两个结点之间存在一条拓扑边。如果没有拓扑控 制,所有结点都会以最大无线传输功率工作。 在这种情况下,一方面,结点有限的能量将被通信部 件快速消耗,降低了网络的生命周期。同时,网络中 每个结点的无线信号将覆盖大量其他结点,造成无线 信号冲突频繁,影响结点的无线通信质量,降低网络 的吞吐率。 另一方面,在生成的网络拓扑中将存在大量的边,从 而导致网络拓扑信息量大,路由计算复杂,浪费了宝 贵的计算资源。因此,需要研究无线传感器网络中的 拓扑控制问题。
基础结构,单跳网络 覆盖区域(通信距离) 发送功率(标准要求) 通信频率(部署要求) 无线干扰
传统的蜂窝式网络由宏蜂窝小区 (macrocell)构成,覆盖半径大,多 为1km~25km;基站的发射功率较 强,一般在10W以上;天线也做得 较高; 微蜂窝小区(microcell) 覆盖半径大 约为30m~300m;发射功率较小, 一般在1W以下;基站天线置于相对 低的地方,如屋顶下方,高于地面 5m~10m; 微微蜂窝小区(picocell) 是微蜂窝的 一种,覆盖半径一般只有10m~30m; 基站发射功率更小,大约在几十毫 瓦左右;其天线一般装于建筑物内 业务集中地点。
河北师大点集拓扑课件第五章
河北师大点集拓扑课件第五章教学内容:1. 集合的基本概念:集合的定义,集合的元素,集合的表示方法,集合的运算(并、交、补)。
2. 映射的基本概念:映射的定义,映射的性质,映射的表示方法,映射的反射和象。
3. 拓扑空间的基本概念:拓扑空间的定义,拓扑空间的基本性质,拓扑空间的表示方法,拓扑空间的例子(欧几里得空间、度量空间、拓扑向量空间)。
教学目标:1. 理解并掌握集合的基本概念和运算,能够运用集合的知识解决实际问题。
2. 理解并掌握映射的基本概念和性质,能够运用映射的知识解决实际问题。
3. 理解并掌握拓扑空间的基本概念和性质,能够运用拓扑空间的知识解决实际问题。
教学难点与重点:重点:集合的基本概念和运算,映射的基本概念和性质,拓扑空间的基本概念和性质。
难点:映射的反射和象的概念,拓扑空间的基本性质。
教具与学具准备:教具:黑板、粉笔、多媒体课件。
学具:笔记本、笔、课本。
教学过程:1. 引入:通过讲解集合的基本概念和运算,让学生理解集合的概念和作用。
2. 讲解映射的基本概念和性质,通过实例让学生理解映射的概念和性质。
3. 讲解拓扑空间的基本概念和性质,通过实例让学生理解拓扑空间的概念和性质。
4. 练习:通过课堂练习,让学生巩固所学的知识,提高解题能力。
板书设计:1. 集合的基本概念和运算。
2. 映射的基本概念和性质。
3. 拓扑空间的基本概念和性质。
作业设计:1. 定义集合的基本概念,并给出例子。
答案:集合是由一些确定的元素构成的整体,元素的性质和相互关系是唯一的。
例如,全体自然数构成的集合N={1,2,3,4,5,…}。
2. 定义映射的基本概念,并给出例子。
答案:映射是一种从集合A到集合B的规则,对于集合A中的每一个元素,都有一个唯一的元素与之对应于集合B中。
例如,函数f(x)=x²,定义域是全体实数R,值域是非负实数R²。
3. 定义拓扑空间的基本概念,并给出例子。
答案:拓扑空间是一种具有拓扑结构的集合,拓扑结构是由开集构成的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5.干扰和竞争 减小通信干扰、减少MAC层的竞争和延长网络的生命期基本上是一致的。 功率控制可以调节发射范围,睡眠调度可以调节工作节点的数量。这些都能 改变1跳邻居节点的个数(也就是与它竞争信道的节点数)。事实上,对于功率 控制,网络无线信道竞争区域的大小与节点的发射半径r成正比[20],所以减 小r就可以减少竞争。睡眠。
第五章 拓扑控制
因为讨论完全覆盖一个目标区域往往是困难的,所以有时也研究部分覆盖, 包括部分的1-覆盖和部分的k-覆盖。而且有时也讨论渐近覆盖,所谓渐近覆 盖是指,当网络中的节点数趋于无穷大时,完全覆盖目标区域的概率趋于1。 对于已部署的静态网络,覆盖控制主要是通过睡眠调度实现的。Voronoi图是 常用的覆盖分析工具。对于动态网络,可以利用节点的移动能力,在初始随 机部署后,根据网络覆盖的要求实现节点的重部署。虚拟势场方法是一种重 要的重部署方法。覆盖控制是拓扑控制的基本问题。
第五章 拓扑控制
目前,拓扑控制研究已经形成功率控制和睡眠调度两个主流研究方向[14]。 所谓功率控制,就是为传感器节点选择合适的发射功率;所谓睡眠调度,就 是控制传感器节点在工作状态和睡眠状态之间的转换。传感器网络拓扑可以 根据节点的可移动与否(动态的或静态的)和部署的可控与否(可控的或不可控 的)分为如下4类:
第五章 拓扑控制
5.2 拓扑控制设计目标与研究现状 5.2.1 拓扑控制的设计目标 1.覆盖 覆盖可以看成是对传感器网络服务质量的度量。在覆盖问题中,最重要的 因素是网络对物理世界的感知能力[15]。覆盖问题可以分为区域覆盖、点覆 盖和栅栏覆盖(barrier coverage) [16]。其中,区域覆盖研究对目标区域的覆 盖(监测)问题;点覆盖研究对一些离散的目标点的覆盖问题;栅栏覆盖研究 运动物体穿越网络部署区域被发现的概率问题。相对而言,对区域覆盖的研 究较多。如果目标区域中的任何一点都被k个传感器节点监测,就称网络是k覆盖的,或者称网络的覆盖度为k。一般要求目标区域的每一个点至少被一个 节点监测,即1-覆盖。
第五章 拓扑控制
2.连通 传感器网络一般是大规模的,所以传感器节点感知到的数据一般要以多跳 的方式传送到汇聚节点。这就要求拓扑控制必须保证网络的连通性。如果至 少要去掉k个传感器节点才能使网络不连通,就称网络是k-连通的,或者称网 络的连通度为k。拓扑控制一般要保证网络是连通(1-连通)的。有些应用可能 要求网络配置到指定的连通度。像渐近覆盖一样,有时也讨论渐近意义下的 连通,亦即当部署区域趋于无穷大时,网络连通的可能性趋于1。功率控制 和睡眠调度都必须保证网络的连通性,这是拓扑控制的基本要求。 3.网络生命期 网络生命期有多种定义。一般将网络生命期定义为直到死亡节点的百分比 低于某个阈值时的持续时间[17]。也可以通过对网络的服务质量的度量来定 义网络的生命期[18],可以认为网络只有在满足一定的覆盖质量、连通质量、 某个或某些其他服务质量时才是存活的。功率控制和睡眠调度是延长网络生 命期的十分有效的技术。最大限度地延长网络的生命期是一个十分复杂的问 题,它一直是拓扑控制研究的主要目标。
(1)静态节点、不可控部署:静态节点随机地部署到给定的区域。这是 大部分拓扑控制研究所作的假设。对稀疏网络的功率控制和对密集网络的睡 眠调度是两种主要的拓扑控制技术。
(2)动态节点、不可控部署:这样的系统称为移动自组织网络(mobile ad hoc network,简称MANET)。其挑战是无论独立自治的节点如何运动,都要 保证网络的正常运转。功率控制是主要的拓扑控制技术。
第五章 拓扑控制
5.1 概述 WSN一般具有大规模、自组织、随机部署、环境复杂、传感器节点资源有 限、网络拓扑经常发生变化的特点[1]。这些特点使拓扑控制成为挑战性研究 课题。同时,这些特点也决定了拓扑控制在WSN研究中的重要性,其主要表 现在以下几个方面: (1)拓扑控制是一种重要的节能技术; (2)拓扑控制保证覆盖质量和连通质量; (3)拓扑控制能够降低通信干扰、提高MAC(media access control)协议 和路由协议的效率、为数据融合提供拓扑基础; (4)拓扑控制能够提高网络的可靠性、可扩展性等其他性能。总之,拓 扑控制对网络性能具有重大的影响,因而对它的研究具有十分重要的意义
第五章 拓扑控制
(3)静态节点、可控部署:节点通过人或机器人部署到固定的位置。拓 扑控制主要是通过控制节点的位置来实现的,功率控制和睡眠调度虽然可以 使用,但已经是次要的了。
(4)动态节点、可控部署:在这类网络中,移动节点能够相互定位。拓 扑控制机制融入到移动和定位策略中。因为移动是主要的能量消耗,所以节 点间的能量高效通信不再是首要问题。因为移动节点的部署不太可能是密集 的,所以睡眠调度也不重要。
第五章 拓扑控制
6.网络延迟 当网络负载较高时,低发射功率会带来较小的端到端延迟;而在低负载情 况下,低发射功率会带来较大的端到端延迟[21]。对于这一点,一个直观的 解释是:当网络负载较低时,高发射功率减少了源节点到目的节点的跳数, 所以降低了端到端的延迟;当网络负载较高时,节点对信道的竞争是激烈的, 低发射功率由于缓解了竞争而减小了网络延迟。这是功率控制和网络延迟之 间的大致关系。 7.拓扑性质 事实上,对于网络拓扑的优劣,很难直接根据拓扑控制的终极目标给出定 量的度量。因此,在设计拓扑控制(特别是功率控制)方案时,往往退而追求 良好的拓扑性质。除了连通性之外,对称性、平面性、稀疏性、节点度的有 界性、有限伸展性(spanner property)等,都是希望具有的性质[22]。 此外,拓扑控制还要考虑诸如负载均衡、简单性、可靠性、可扩展性等其 他方面。拓扑控制的各种设计目标之间有着错综复杂的关系。对这些关系的 研究也是拓扑控制研究的重要内容。
第五章 拓扑控制
4.吞吐能力 设目标区域是一个凸区域,每个节点的吞吐率为λbits/s,在理想情况下, 则有下面的关系式[19]:
其中,A是目标区域的面积 1,6A2WWL 是n1r b节its /点s 的最高传输速率,π是圆周率,Δ是 大于0的常数,L是源节点到目的节点的平均距离,n是节点数,r是理想球状 无线电发射模型的发射半径。