随机振动-试验人员必须了解的参数及设置
振动试验参数参考
随机振动-试验人员必须了解的参数及设置江苏省电子信息产品质量监督检验研究院谢杰一.简述近年来,随机振动试验在我院所有振动试验中的比例越来越高,原因有三:1、科学进步,此类设备的软件大量普及,一般只需在原来的电磁振动台加上一套控制软件及配套设备就可实行。
2、企业随着国际标准的大量采用,许多振动试验都采用随机振动。
3、随机振动相对传统的正弦振动有着无法比拟的优点,它能模拟各种实际运输条件下可能遇到的振动情况,如模拟公路运输,模拟铁路运输,模拟海运运输等等。
本文主要介绍对于试验人员来说必须了解的随机振动参数及设置要求。
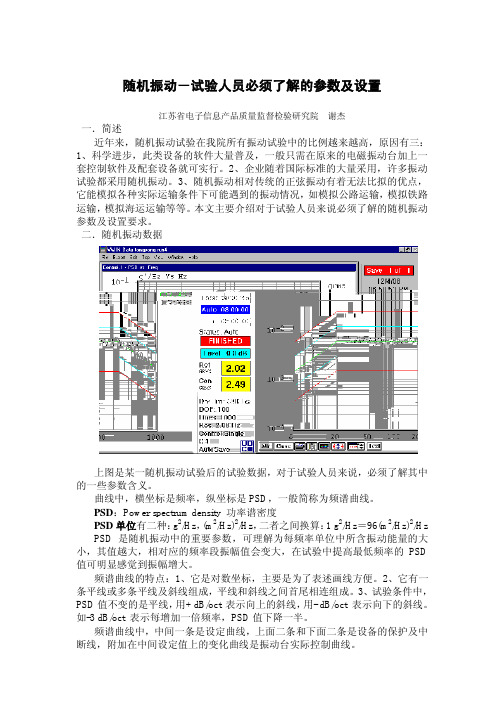
二.随机振动数据上图是某一随机振动试验后的试验数据,对于试验人员来说,必须了解其中的一些参数含义。
曲线中,横坐标是频率,纵坐标是PSD,一般简称为频谱曲线。
PSD:Power spectrum density 功率谱密度PSD单位有二种:g2/Hz,(m2/Hz)2/Hz,二者之间换算:1 g2/Hz=96(m2/Hz)2/Hz PSD是随机振动中的重要参数,可理解为每频率单位中所含振动能量的大小,其值越大,相对应的频率段振幅值会变大,在试验中提高最低频率的PSD 值可明显感觉到振幅增大。
频谱曲线的特点:1、它是对数坐标,主要是为了表述画线方便。
2、它有一条平线或多条平线及斜线组成,平线和斜线之间首尾相连组成。
3、试验条件中,PSD值不变的是平线,用+dB/oct表示向上的斜线,用- dB/oct 表示向下的斜线。
如-3 dB/oct 表示每增加一倍频率,PSD值下降一半。
频谱曲线中,中间一条是设定曲线,上面二条和下面二条是设备的保护及中断线,附加在中间设定值上的变化曲线是振动台实际控制曲线。
三.频率的选择频率是随机振动的另一个重要参数,其单位是Hz,频率的选择一般与实践使用范围有关。
例如:海运试验条件频率较低,一般从1~100Hz,而且低频PSD 值较大,随机振动的感觉像乘海轮,振幅大,频率低。
振动试验参数参考

Item 名称 (Description)
Type 型号 (Model)
dimensions 尺寸、(cm)
Test Range 试验范围
Manufacturer 生产厂家
Electromagnetic
G-0145
台 面 12.5× 450kg, 120g
Shinken
Vibration Test
对于频率,试验人员必须注意最高频率和最低频率值。高频时,有些试验附 加台面有可能不符合要求,不能使用;最低频率时,要了解其振幅是否要超过振 动台的最大允许值,不注意的话有可能损伤台面,使振动试验无法进行下去。 四.试验时间
试验时间在随机振动试验数据中位于图中右上方。 试验时间有二项:Total 和 Auto。Auto 是试验要做的时间,Total 是设备运 行的时间,Total 比 Auto 多的原因是:随机振动试验时计算机要进行预处理,才 能产生符合试验要求的频谱曲线,预处理的时间一般为 2~4 分钟,而在正弦振动 中是不需要的。 试验时间的选择,在 GJB150.16 标准中,它给出了 1 小时的随机振动相当于 运输多少公里的值,这给试验人员进行试验时间的选择提供了方便。 随机振动与正弦振动有许多不同之处,如正弦振动中一般三个方向的试验条 件和试验时间都是相同的,而在随机振动中,三个试验方向的条件和试验时间都 可能会不同,一般来说,垂直方向的条件最大,试验时间也最长。 PSD、频度和试验时间组成随机振动三要素,有了这三个条件就可以进行随 机振动试验。 五.均方根加速度 Grms 试验人员必须了解均方根加速度 Grms。 均方根加速度 Grms:它是通过计算频谱曲线下面的面积后再开根号求出。 如 PSD 是一平线,则其计算公式为:Grms= wf ,其中 W 是 PSD 值,f 是频 率值,其值等于最高频率-最低频率。一般试验标准中会给出相关值,给试验人 员参考。 Grms 值与正弦振动的 g 值有类似的作用,它与设备的最大推力有关,是选 择设备的重要参数。 六.设备的选用 了解频谱曲线的特点与 Grms 值后,就可以针对样品选用试验设备。目前我 院有振动试验设备 4 套,除了机械振动无法进行随机振动外,其它三台都可以进 行随机振动试验,试验人员必须了解它们的性能,才能根据试验条件及样品作出 选择。下面是我院振动 3 台试验设备的具体性能:
振动试验参数
振动试验参数振动试验是一种重要的质量检测方法,通过模拟实际工作环境下的振动条件,对产品的耐久性、可靠性等进行测试。
在进行振动试验时,需要设置一系列参数来确保测试结果的准确性和可靠性。
本文将详细介绍振动试验参数的设置。
一、振动试验参数概述1. 振动方式:在进行振动试验时,需要选择适合被测物品的振动方式。
常见的振动方式有正弦波、随机波、冲击波等。
2. 振幅:指被测物品受到的最大加速度值。
通常使用峰值加速度表示,单位为g(重力加速度)。
不同类型的产品对应着不同的振幅要求。
3. 频率范围:指被测物品所受到的频率范围。
通常使用频率范围来表示,单位为Hz(赫兹)。
不同类型的产品对应着不同的频率范围要求。
4. 持续时间:指被测物品所受到的持续时间。
通常使用小时或分钟来表示。
5. 控制方式:指控制器控制被测物品运行状态时所采用的控制方式。
常见的控制方式有位移控制、速度控制和加速度控制。
6. 加速度曲线:指加速度变化的曲线形状。
通常使用正弦波、三角波、方波等形状。
二、振动试验参数详解1. 振动方式1.1 正弦波振动正弦波振动是一种最基本的振动方式,它可以模拟实际工作环境下的周期性振动。
在进行正弦波振动试验时,需要设置以下参数:(1)频率范围:通常在5Hz~2000Hz之间。
(2)振幅:通常使用峰值加速度表示,单位为g(重力加速度)。
不同类型的产品对应着不同的振幅要求。
(3)持续时间:通常使用小时或分钟来表示。
1.2 随机波振动随机波振动是一种随机变化的非周期性振动,可以模拟实际工作环境下的非周期性震荡。
在进行随机波振动试验时,需要设置以下参数:(1)频率范围:通常在5Hz~3000Hz之间。
(2)峰值加速度:通常使用峰值加速度表示,单位为g(重力加速度)。
不同类型的产品对应着不同的振幅要求。
(3)持续时间:通常使用小时或分钟来表示。
1.3 冲击波振动冲击波振动是一种短暂的、高能量的非周期性振动,可以模拟实际工作环境下的冲击负载。
振动试验的参数

振动试验的参数振动试验是一种常用的试验方法,用于评估产品或设备在真实工作环境下的振动性能。
通过对振动试验的参数进行分析和评估,可以帮助我们更好地了解产品或设备的可靠性、耐久性和安全性。
在进行振动试验时,需要确定以下几个重要的参数:1. 激振方式:激振方式指的是对被试产品或设备施加振动的方式。
常用的激振方式包括机械激振和电动激振。
机械激振是通过机械装置施加力或冲击来引起振动,而电动激振则是通过电机产生振动信号来引起振动。
选择合适的激振方式可以确保试验结果的准确性和可靠性。
2. 频率范围:频率范围是指振动试验中施加的振动信号的频率范围。
不同的产品或设备在工作时会遇到不同频率的振动,因此频率范围的选择要根据实际工作环境来确定。
一般情况下,频率范围应包括被试产品或设备在工作过程中可能遇到的最低和最高频率。
3. 激振级别:激振级别是指振动信号的幅值大小。
激振级别的选择与产品或设备的使用条件和要求密切相关。
过高的激振级别可能会对被试产品或设备造成损坏,而过低的激振级别则可能无法准确地反映出产品或设备在真实工作环境下的振动性能。
4. 振动方向:振动方向是指振动信号施加的方向。
在振动试验中,通常会选择垂直方向、水平方向或多轴方向来施加振动。
选择合适的振动方向可以使试验更加贴近实际工作环境,从而更准确地评估产品或设备的振动性能。
5. 试验时间:试验时间是指进行振动试验的持续时间。
试验时间的长短需要根据实际需要和试验目的来确定。
一般来说,试验时间应足够长,以确保能够充分评估产品或设备在振动环境下的可靠性和耐久性。
振动试验的参数选择是一个复杂的问题,需要考虑多个因素的影响。
在选择参数时,我们应该充分了解被试产品或设备的使用条件和要求,以及相关的国家标准和行业标准。
还需要根据试验目的和实验室设备的能力来确定参数。
振动试验的参数选择对于评估产品或设备的振动性能至关重要。
合理选择参数可以确保试验结果的准确性和可靠性,从而为产品或设备的设计和改进提供有价值的参考。
随机振动-试验人员必须了解的参数及设置
随机振动-试验人员必须了解的参数及设置江苏省电子信息产品质量监督检验研究院谢杰一.简述近年来,随机振动试验在我院所有振动试验中的比例越来越高,原因有三:1、科学进步,此类设备的软件大量普及,一般只需在原来的电磁振动台加上一套控制软件及配套设备就可实行。
2、企业随着国际标准的大量采用,许多振动试验都采用随机振动。
3、随机振动相对传统的正弦振动有着无法比拟的优点,它能模拟各种实际运输条件下可能遇到的振动情况,如模拟公路运输,模拟铁路运输,模拟海运运输等等。
本文主要介绍对于试验人员来说必须了解的随机振动参数及设置要求。
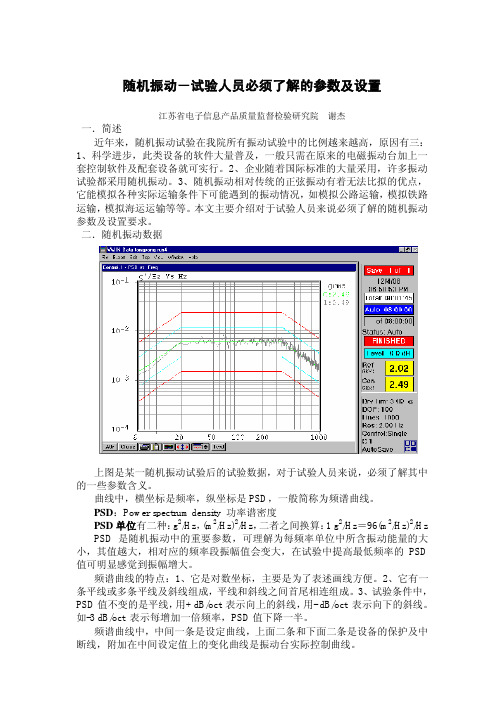
二.随机振动数据上图是某一随机振动试验后的试验数据,对于试验人员来说,必须了解其中的一些参数含义。
曲线中,横坐标是频率,纵坐标是PSD,一般简称为频谱曲线。
PSD:Power spectrum density 功率谱密度PSD单位有二种:g2/Hz,(m2/Hz)2/Hz,二者之间换算:1 g2/Hz=96(m2/Hz)2/Hz PSD是随机振动中的重要参数,可理解为每频率单位中所含振动能量的大小,其值越大,相对应的频率段振幅值会变大,在试验中提高最低频率的PSD 值可明显感觉到振幅增大。
频谱曲线的特点:1、它是对数坐标,主要是为了表述画线方便。
2、它有一条平线或多条平线及斜线组成,平线和斜线之间首尾相连组成。
3、试验条件中,PSD值不变的是平线,用+dB/oct表示向上的斜线,用- dB/oct 表示向下的斜线。
如-3 dB/oct 表示每增加一倍频率,PSD值下降一半。
频谱曲线中,中间一条是设定曲线,上面二条和下面二条是设备的保护及中断线,附加在中间设定值上的变化曲线是振动台实际控制曲线。
三.频率的选择频率是随机振动的另一个重要参数,其单位是Hz,频率的选择一般与实践使用范围有关。
例如:海运试验条件频率较低,一般从1~100Hz,而且低频PSD 值较大,随机振动的感觉像乘海轮,振幅大,频率低。
振动试验参数详解

振动试验参数详解引言振动试验是一种常用的工程实验方法,用于评估产品在振动环境下的可靠性和耐久性。
在进行振动试验之前,需要确定一系列参数,如振动频率、加速度、持续时间等。
本文将详细介绍振动试验中的各个参数及其影响。
振动频率振动频率是指每秒钟发生的振动周期数。
它是一个重要的参数,决定了被测试物体所受到的振动力大小。
通常以赫兹(Hz)表示,1Hz等于每秒一个周期。
不同类型的产品对应不同的振动频率范围。
•低频振动:一般指频率在5Hz以下的振动,适用于大型设备、建筑结构等。
•中频振动:一般指频率在5Hz到1000Hz之间的振动,适用于电子设备、汽车零部件等。
•高频振动:一般指频率在1000Hz以上的振动,适用于微型元件、精密仪器等。
选择合适的振动频率可以更好地模拟实际使用环境下产品所受到的力量。
振幅振幅是指振动过程中物体离开平衡位置的最大位移。
它是描述振动强度大小的参数,通常以米(m)或毫米(mm)表示。
振幅与振动力之间存在着一定关系,较大的振幅意味着较大的振动力。
•小振幅:一般指位移小于等于0.1mm的振动,适用于对产品进行初步筛选。
•中等振幅:一般指位移在0.1mm到1mm之间的振动,适用于对产品进行性能评估。
•大振幅:一般指位移大于1mm的振动,适用于对产品进行极限测试。
选择合适的振幅可以提高试验效果,并确保产品在实际使用中不会出现过大的变形或破坏。
加速度加速度是指单位时间内速度变化率的大小。
在振动试验中,加速度是描述物体所受到的加速力大小的参数。
通常以g(重力加速度)为单位,1g等于9.8m/s²。
•低加速度:一般指加速度小于等于10g,适用于对产品进行初步筛选。
•中等加速度:一般指加速度在10g到50g之间,适用于对产品进行性能评估。
•高加速度:一般指加速度大于50g,适用于对产品进行极限测试。
选择合适的加速度可以更好地模拟实际使用环境下产品所受到的冲击力。
持续时间持续时间是指振动试验的时间长度。
振动试验参数详细解析
振动试验参数详细解析【引言】振动试验是一种广泛应用于工程领域的实验方法,通过对被试对象施加不同频率和振幅的载荷,来模拟实际运行环境中的振动情况。
振动试验参数的选择和解析对于保证试验结果的准确性和可靠性至关重要。
本文将详细解析振动试验的各种参数,包括振动方式、振动频率、振幅、加速度、位移和时间等,以帮助读者更好地理解并应用于实际工程实践中。
【正文】1. 振动方式振动试验可以根据振动方式的不同分为单轴振动和多轴振动两种。
单轴振动是指在一个方向上施加载荷,而多轴振动则是在多个方向上施加载荷。
选择振动方式需要根据被试对象在实际使用中所受到的振动情况来决定,以尽可能接近实际情况。
2. 振动频率振动试验的频率是指振动载荷的周期性变化,通常以赫兹(Hz)为单位。
频率的选择主要取决于被试对象所处的振动环境和试验的目的。
一般来说,低频振动主要用于模拟地震等自然振动,高频振动则更适用于模拟高速旋转机械等工业振动。
3. 振幅振幅是指振动载荷的变化幅度,通常以加速度或位移的大小来表示。
振幅的选择需要结合被试对象的实际使用情况和试验目的来决定。
较小的振幅可以用于评估结构的线性响应,而较大的振幅则可以用于评估结构的非线性响应和疲劳寿命。
4. 加速度加速度是指振动试验中施加在被试对象上的加速度大小,通常以重力加速度(g)为单位。
选择适当的加速度需要考虑被试对象的材料特性、结构强度和试验要求等因素。
5. 位移位移是指被试对象在振动试验中的位移变化,通常以毫米(mm)或微米(μm)为单位。
位移的大小对于评估结构的变形和振动特性具有重要意义,对于一些精细结构和振动敏感的设备,位移要求通常较小。
6. 时间振动试验的时间是指试验持续的时间,通常以小时(h)为单位。
试验时间的选择需要根据被试对象的使用寿命、试验目的和试验要求等因素来确定。
较短的试验时间可以快速评估结构的初始响应,而较长的试验时间则可以用于评估结构的长期稳定性和耐久性。
【总结与回顾】在振动试验中,选择合适的试验参数对于保证试验结果的准确性和可靠性至关重要。
振动试验参数参考

一.简述近年来,随机振动试验在我院所有振动试验中的比例越来越高,原因有三:1、科学进步,此类设备的软件大量普及,一般只需在原来的电磁振动台加上一套控制软件及配套设备就可实行。
2、企业随着国际标准的大量采用,许多振动试验都采用随机振动。
3、随机振动相对传统的正弦振动有着无法比拟的优点,它能模拟各种实际运输条件下可能遇到的振动情况,如模拟公路运输,模拟铁路运输,模拟海运运输等等。
本文主要介绍对于试验人员来说必须了解的随机振动参数及设置要求。
二.随机振动数据上图是某一随机振动试验后的试验数据,对于试验人员来说,必须了解其中的一些参数含义。
曲线中,横坐标是频率,纵坐标是PSD,一般简称为频谱曲线。
PSD:Power spectrum density 功率谱密度PSD有二种:g2/Hz,(m2/Hz)2/Hz,二者之间换算:1 g2/Hz=96(m2/Hz)2/Hz PSD 是随机振动中的重要参数,可理解为每频率单位中所含振动能量的大小,其值越大,相对应的频率段振幅值会变大,在试验中提高最低频率的PSD值可明显感觉到振幅增大。
频谱曲线的特点:1、它是对数坐标,主要是为了表述画线方便。
2、它有一条平线或多条平线及斜线组成,平线和斜线之间首尾相连组成。
3、试验条件中,PSD值不变的是平线,用+ dB/oct 表示向上的斜线,用- dB/oct 表示向下的斜线。
如-3 dB/oct 表示每增加一倍频率,PSD值下降一半。
频谱曲线中,中间一条是设定曲线,上面二条和下面二条是设备的保护及中断线,附加在中间设定值上的变化曲线是振动台实际控制曲线。
三.频率的选择频率是随机振动的另一个重要参数,其单位是Hz,频率的选择一般与实践使用范围有关。
例如:海运试验条件频率较低,一般从1~100Hz,而且低频PSD值较大,随机振动的感觉像乘海轮,振幅大,频率低。
铁路运输试验条件,频率是5~150Hz,也是低频的PSD值大,随机振动给人的感觉如同乘座火车旅行,有趣的事,有时感到声音也非常相似。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
随机振动-试验人员必须了解的参数及设置
江苏省电子信息产品质量监督检验研究院谢杰
一.简述
近年来,随机振动试验在我院所有振动试验中的比例越来越高,原因有三:1、科学进步,此类设备的软件大量普及,一般只需在原来的电磁振动台加上一套控制软件及配套设备就可实行。
2、企业随着国际标准的大量采用,许多振动试验都采用随机振动。
3、随机振动相对传统的正弦振动有着无法比拟的优点,它能模拟各种实际运输条件下可能遇到的振动情况,如模拟公路运输,模拟铁路运输,模拟海运运输等等。
本文主要介绍对于试验人员来说必须了解的随机振动参数及设置要求。
二.随机振动数据
上图是某一随机振动试验后的试验数据,对于试验人员来说,必须了解其中的一些参数含义。
曲线中,横坐标是频率,纵坐标是PSD,一般简称为频谱曲线。
PSD:Power spectrum density 功率谱密度
PSD单位有二种:g2/Hz,(m2/Hz)2/Hz,二者之间换算:1 g2/Hz=96(m2/Hz)2/Hz PSD是随机振动中的重要参数,可理解为每频率单位中所含振动能量的大小,其值越大,相对应的频率段振幅值会变大,在试验中提高最低频率的PSD 值可明显感觉到振幅增大。
频谱曲线的特点:1、它是对数坐标,主要是为了表述画线方便。
2、它有一条平线或多条平线及斜线组成,平线和斜线之间首尾相连组成。
3、试验条件中,PSD值不变的是平线,用+dB/oct表示向上的斜线,用- dB/oct 表示向下的斜线。
如-3 dB/oct 表示每增加一倍频率,PSD值下降一半。
频谱曲线中,中间一条是设定曲线,上面二条和下面二条是设备的保护及中断线,附加在中间设定值上的变化曲线是振动台实际控制曲线。
三.频率的选择
频率是随机振动的另一个重要参数,其单位是Hz,频率的选择一般与实践使用范围有关。
例如:海运试验条件频率较低,一般从1~100Hz,而且低频PSD 值较大,随机振动的感觉像乘海轮,振幅大,频率低。
铁路运输试验条件,频率是5~150Hz,也是低频的PSD值大,随机振动给人的感觉如同乘座火车旅行,有趣的事,有时感到声音也非常相似。
高频随机振动,一般高频至2000Hz时,振动时噪声非常刺耳,感觉与飞机刚起飞或到达目的地下降时相似,高频振动一般应用于飞机运输或者其它有高频场合的地方。
对于频率,试验人员必须注意最高频率和最低频率值。
高频时,有些试验附加台面有可能不符合要求,不能使用;最低频率时,要了解其振幅是否要超过振动台的最大允许值,不注意的话有可能损伤台面,使振动试验无法进行下去。
四.试验时间
试验时间在随机振动试验数据中位于图中右上方。
试验时间有二项:Total 和Auto。
Auto是试验要做的时间,Total 是设备运行的时间,Total 比Auto多的原因是:随机振动试验时计算机要进行预处理,才能产生符合试验要求的频谱曲线,预处理的时间一般为2~4分钟,而在正弦振动中是不需要的。
试验时间的选择,在GJB150.16标准中,它给出了1小时的随机振动相当于运输多少公里的值,这给试验人员进行试验时间的选择提供了方便。
随机振动与正弦振动有许多不同之处,如正弦振动中一般三个方向的试验条件和试验时间都是相同的,而在随机振动中,三个试验方向的条件和试验时间都可能会不同,一般来说,垂直方向的条件最大,试验时间也最长。
PSD、频度和试验时间组成随机振动三要素,有了这三个条件就可以进行随机振动试验。
五.均方根加速度Grms
试验人员必须了解均方根加速度Grms。
均方根加速度Grms:它是通过计算频谱曲线下面的面积后再开根号求出。
如PSD是一平线,则其计算公式为:Grms=,其中W是PSD值,f是频
wf
率值,其值等于最高频率-最低频率。
一般试验标准中会给出相关值,给试验人员参考。
Grms值与正弦振动的g值有类似的作用,它与设备的最大推力有关,是选择设备的重要参数。
六.设备的选用
了解频谱曲线的特点与Grms值后,就可以针对样品选用试验设备。
目前我院有振动试验设备4套,除了机械振动无法进行随机振动外,其它三台都可以进行随机振动试验,试验人员必须了解它们的性能,才能根据试验条件及样品作出选择。
下面是我院振动3台试验设备的具体性能:
Item
名称(Description)
Type
型号
(Model)
dimensions
尺寸、(cm)
Test Range
试验范围
Manufacturer
生产厂家
Electromagnetic Vibration Test
Systems
电动振动台G-0145 台面12.5×
12.5
450kg,120g
空载,
25mmp-p,5~
3500Hz
Shinken
CO,.LTD
JAPAN
日本振研
Electromagnetic Vibration Test
Systems
电动振动台CV-300-1.5 台面80×
80
300kg,
40mmp-p,2~
2000Hz
IMV LAB
CO,.LTD
JAPAN
国际振研
Vibration Test Systems
电动振动台SAI30-R16C 台面
垂直80×
140, 水平
140×150
4500kg,100g
正弦,60g随
机,51mmp-p,
2100Hz,负载
680kg. 动圈
45.4kg
动圈直径
445mm,垂直
台面238kg
水平284kg
Unholtz-Dickie
Corporation
美国UD 公司
一般原则是可以:小试验样品尽量安排在小振动台上做,大样品及大试验条件安排在大的振动台进行试验。
七.试验人员必须了解的其它设置参数
随机振动试验设置中,试验人员还必须了解传感器的灵敏度,Drv Lim,Lines 等值。
试验中每一个传感器的灵敏度都不同,必须注意不能搞错。
Drv Lim是随机振动时对振幅的限制,一般选取3σ。
Lines是频谱线,它对随机振动的模拟的精确度相关,一般越大,精度越高。
正常情况下可取最高频度值即可。
2008年12月18日。