光电式编码器(结构、工作原理、提高分辨率的方法)电磁
光电编码器原理结构图
光电编码器原理结构图增量式光电旋转编码器所谓编码器即是将某种物理量转换为数字格式的装置。
运动控制系统中的编码器的作用是将位置和角度等参数转换为数字量。
可采用电接触、磁效应、电容效应和光电转换等机理,形成各种类型的编码器。
运动控制系统中最常见的编码器是光电编码器。
光电编码器根据其用途的不同分为旋转光电编码器和直线光电编码器,分别用于测量旋转角度和直线尺寸。
光电编码器的关键部件是光电编码装置,在旋转光电编码器中是圆形的码盘(codewheel或codedisk),而在直线光电编码器中则是直尺形的码尺(codestrip)。
码盘和码尺根据用途和成本的需要,可由金属、玻璃和聚合物等材料制作,其原理都是在运动过程中产生代表运动位置的数字化的光学信号。
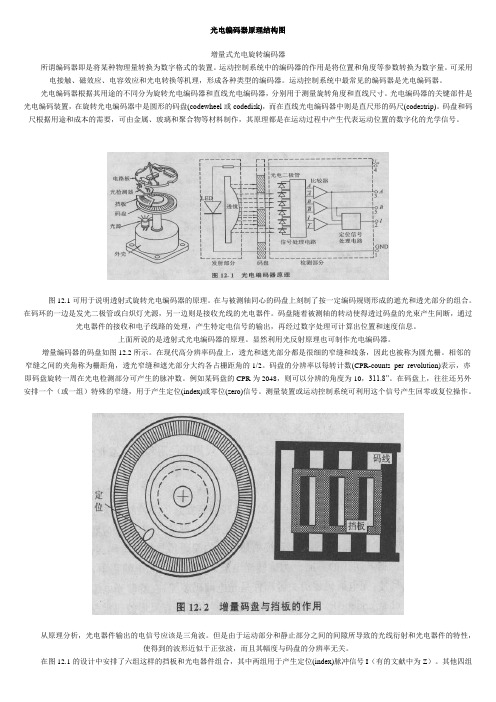
图12.1可用于说明透射式旋转光电编码器的原理。
在与被测轴同心的码盘上刻制了按一定编码规则形成的遮光和透光部分的组合。
在码环的一边是发光二极管或白炽灯光源,另一边则是接收光线的光电器件。
码盘随着被测轴的转动使得透过码盘的光束产生间断,通过光电器件的接收和电子线路的处理,产生特定电信号的输出,再经过数字处理可计算出位置和速度信息。
上面所说的是透射式光电编码器的原理。
显然利用光反射原理也可制作光电编码器。
增量编码器的码盘如图12.2所示。
在现代高分辨率码盘上,透光和遮光部分都是很细的窄缝和线条,因此也被称为圆光栅。
相邻的窄缝之间的夹角称为栅距角,透光窄缝和遮光部分大约各占栅距角的1/2。
码盘的分辨率以每转计数(CPR-counts per revolution)表示,亦即码盘旋转一周在光电检测部分可产生的脉冲数。
例如某码盘的CPR为2048,则可以分辨的角度为10,311.8”。
在码盘上,往往还另外安排一个(或一组)特殊的窄缝,用于产生定位(index)或零位(zero)信号。
测量装置或运动控制系统可利用这个信号产生回零或复位操作。
从原理分析,光电器件输出的电信号应该是三角波。
编码器工作原理

编码器工作原理引言概述:编码器是一种用于将机械运动转换为数字信号的装置,广泛应用于各种自动化系统中。
它可以精确地测量物体的位置、速度和方向,从而实现精准控制和监测。
本文将介绍编码器的工作原理,以帮助读者更好地理解其在自动化系统中的作用。
一、光电编码器1.1 光电编码器的结构:光电编码器由光源、光栅、接收器和信号处理电路组成。
光源发出光束,经过光栅反射或透过后,被接收器接收并转换成电信号,信号处理电路将电信号转换成数字信号。
1.2 光电编码器的工作原理:当物体运动时,光栅会随之移动,使得光束的强度发生变化。
接收器接收到的光信号也会随之变化,通过信号处理电路将这些变化转换成数字信号,从而确定物体的位置和速度。
1.3 光电编码器的应用:光电编码器广泛应用于数控机床、机器人、印刷设备等自动化系统中,用于实现位置控制、速度控制和角度测量等功能。
二、磁编码器2.1 磁编码器的结构:磁编码器由磁性标记、磁传感器和信号处理电路组成。
磁性标记可以是永磁体或磁性条,磁传感器用于检测磁场的变化,信号处理电路将检测到的信号转换成数字信号。
2.2 磁编码器的工作原理:当物体运动时,磁性标记会随之移动,磁传感器检测到磁场的变化,并将其转换成电信号。
信号处理电路将电信号转换成数字信号,确定物体的位置和速度。
2.3 磁编码器的应用:磁编码器适用于高温、高速、腐蚀性环境下的自动化系统,如汽车发动机、风力发电机等,用于实现位置控制和速度控制。
三、绝对值编码器3.1 绝对值编码器的结构:绝对值编码器由多个独立的编码单元组成,每个编码单元对应一个位置码。
通过读取每个位置码的状态,可以确定物体的绝对位置。
3.2 绝对值编码器的工作原理:每个编码单元都有一个唯一的位置码,当物体运动时,读取每个位置码的状态,可以确定物体的绝对位置,无需重新归零。
3.3 绝对值编码器的应用:绝对值编码器广泛应用于需要高精度位置控制和无需重新归零的自动化系统中,如医疗设备、航空航天设备等。
光电式编码器的工作原理
光电式编码器的工作原理
光电式编码器是一种通过光电传感器来测量物体位置和运动的
装置。
它由光源、光电传感器和编码盘等组成。
光源发出光束,经过编码盘上的光栅或光轴透过孔,然后被光电传感器接收并转换成电信号,最终由电路板处理和解码。
光电式编码器通常采用增量式编码方式来测量物体位置和运动。
增量式编码器根据编码盘上的光栅或光轴透过孔的变化来确定位置和运动。
编码盘上的光栅或光轴透过孔被分为多个等距的区域,每个区域代表一个编码位。
当物体运动时,光栅或光轴透过孔会相对于光电传感器产生变化,从而产生脉冲信号。
根据脉冲信号的数量和方向,可以确定物体的位置和运动方向。
光电式编码器具有精度高、反应速度快、抗干扰能力强等特点。
它广泛应用于机械加工、自动化控制、测量仪器等领域。
在机械加工中,光电式编码器可以用于控制机床的位置和速度,从而实现精确加工。
在自动化控制中,光电式编码器可以用于控制机器人的位置和姿态,从而实现精确的运动控制。
在测量仪器中,光电式编码器可以用于测量物体的位移和速度,从而提供准确的测量结果。
总之,光电式编码器通过光电传感器将光信号转换成电信号,利用光栅或光轴透过孔的变化来测量物体位置和运动。
它具有高精度、快速
响应和抗干扰能力强的优点,在多个领域都有广泛的应用。
光电编码器原理与维修讲解
高精度的光电编码器的结构及原理2009年06月12日星期五8:48本文主要介绍高精度的光电编码器的内部结构、工作原理与位置检测的方法。
一、光电编码器的介绍:光电编码器是通过读取光电编码盘上的图案或编码信息来表示与光电编码器相连的电机转子的位置信息的。
根据光电编码器的工作原理可以将光电编码器分为绝对式光电编码器与增量式光电编码器,下面我就这两种光电编码器的结构与工作原理做介绍。
(一)、绝对式光电编码器绝对式光电编码器如图所示,他是通过读取编码盘上的二进制的编码信息来表示绝对位置信息的。
编码盘是按照一定的编码形式制成的圆盘。
图1是二进制的编码盘,图中空白部分是透光的,用“0”来表示;涂黑的部分是不透光的,用“1”来表示。
通常将组成编码的圈称为码道,每个码道表示二进制数的一位,其中最外侧的是最低位,最里侧的是最高位。
如果编码盘有4个码道,则由里向外的码道分别表示为二进制的23、22、21和20,4位二进制可形成16个二进制数,因此就将圆盘划分16个扇区,每个扇区对应一个4位二进制数,如0000、0001、 (1111)图1按照码盘上形成的码道配置相应的光电传感器,包括光源、透镜、码盘、光敏二极管和驱动电子线路。
当码盘转到一定的角度时,扇区中透光的码道对应的光敏二极管导通,输出低电平“0”,遮光的码道对应的光敏二极管不导通,输出高电平“1”,这样形成与编码方式一致的高、低电平输出,从而获得扇区的位置脚。
(二)、增量式光电编码器 Increamental Optical-electrical Encoder增量式光电编码器是码盘随位置的变化输出一系列的脉冲信号,然后根据位置变化的方向用计数器对脉冲进行加/减计数,以此达到位置检测的目的。
它是由光源、透镜、主光栅码盘、鉴向盘、光敏元件和电子线路组成。
增量式光电编码器的工作原理是是由旋转轴转动带动在径向有均匀窄缝的主光栅码盘旋转,在主光栅码盘的上面有与其平行的鉴向盘,在鉴向盘上有两条彼此错开90o相位的窄缝,并分别有光敏二极管接收主光栅码盘透过来的信号。
光电编码器的工作原理剖析

光电编码器的工作原理剖析光源通常是一种发光二极管(LED),它会发出一个光束。
这个光束会经过一个光隔离装置,以确保光源的输出稳定并没有被外界的光线影响。
光电元件是光电编码器的核心部分,它通常由一个光敏二极管或光敏电阻组成。
光栅通常是一个条状的透明介质,上面由一系列周期性排列的透明和不透明的条纹组成。
当物体运动时,光斑会通过光栅,被分成等距离的光斑和暗斑。
当光斑经过光栅时,它会照射到光电元件上。
光电元件会将光信号转换成电信号,并且这个信号的频率和光栅的速度有关。
根据光栅上光斑和暗斑的周期性变化,光电元件能够测量物体的位置和速度。
在测量位置时,光电编码器会将光栅上的每个光斑和暗斑都对应一个特定的电信号。
根据光电编码器的分辨率,可以将物体的位置划分成非常小的间隔。
当物体移动时,光电编码器会持续地测量和更新位置信息。
在测量速度时,光电编码器会根据光栅上光斑和暗斑的变化频率来计算物体的速度。
随着物体的移动,光斑和暗斑的变化速度也会随之变化。
为了提高测量的精度和稳定性,光电编码器通常配备缓冲电路和信号处理器。
缓冲电路可强化电信号并消除干扰。
信号处理器可以将电信号转换成数字信号,并根据需要进行滤波、放大或线性化等处理。
光电编码器的工作原理使其在许多领域得到广泛应用。
比如,工业机械领域中,光电编码器常用于测量机械零件的位置和速度,以确保机械运行的准确性。
在机器人和自动化控制系统中,光电编码器可用于反馈位置信息,以实现精确定位和控制。
在医疗设备中,光电编码器可用于测量患者身体部位的位置和运动,并帮助医生进行诊断和治疗。
总之,光电编码器通过使用光源、光电元件和光栅等组件,可以将物体的位置和速度转换成电信号。
它的工作原理基于通过光栅上光斑和暗斑的变化来测量物体的位置和速度。
光电编码器在测量和控制领域具有广泛的应用价值。
光电式编码器
通常数控机床的机械原点与各铀的脉冲编码器发出Z相脉冲的位置
是一致的。
光源
码盘
光电元件
Z 零位脉冲 A 增量脉冲 B辨向脉冲
图6.30 增量式编码器的结构图
(2)绝对式编码器
1)码制和码盘 码盘按其所用码制可分为:二进制、循环码(葛莱码)、十进
绝对式编码器图案不均匀,几位编码器其码盘上就有几位码 道,在编码器的相应位置都可输出对应的数字码,在码盘运动过 程中读取这些代码,即能实时测得坐标的变化。这种方法的优点 是坐标固定与测量以前状态无关,不需起动时的位置重合,抗干 扰能力强,无累积误差,具有断电位置保持,在不读数的范围内 移动速度可超越极限响应速度,不需要方向判别和可逆计数,信 号并行传送等。缺点是结构复杂、价格高,为提高分辨率需要提 高码道数目或者使用减速齿轮机构组成双码盘机构,将任意位置 取作零位时需进行一定的运算。
2.光电式编码器的接口与安装使用注意事项
(1)机械方面
编码器轴与用户端输出轴之间通过联轴节连接如下图所示, 避免因用户轴的串动、跳动,造成编码器轴系和码盘的损坏。应 保证编码器轴与用户轴的不同轴度<0.2mm,与轴线的偏角<1.5o 安装时严禁敲击和摔打碰撞,以免损坏轴系和码盘。 (2)电气方面
编码器的输出线不能与动力线等绕在一起或同一管道传输, 也不宜在配电盘附近使用,配线时采用屏蔽电缆,可以参照下图 进行配线。
增量式编码器图案和光脉冲信号均匀,可将任意位置作为基 准点,从该点开始按一定的量化单位检测位移或转角,计量脉冲 数即可折算为位移或转角。该方法因无确定的对应测量点,一旦 停电则失掉当前位置,且速度不可超越计数器极限响应速度,此 外由于噪声影响可能造成计数积累误差。优点是其的零点可任意 预置,且测量速度仅受计数器容量限制。
光电编码器工作原理

光电编码器工作原理光电编码器是一种能够将机械位移转换成电信号的装置,它在工业自动化控制系统中起着至关重要的作用。
光电编码器通过光电传感器和编码盘之间的互动,能够准确地测量旋转或线性位移,将其转换成数字信号,从而实现位置、速度和加速度的测量。
本文将详细介绍光电编码器的工作原理。
光电编码器主要由光电传感器和编码盘两部分组成。
光电传感器负责发射和接收光信号,而编码盘则根据需要进行旋转或线性移动。
在光电编码器工作时,编码盘上的光栅或编码孔会随着机械位移的变化而产生相应的光信号变化。
光电传感器接收到这些光信号后,通过电子电路将其转换成数字信号输出,从而实现对机械位移的准确测量。
在光电编码器中,光栅和编码孔是至关重要的部分。
光栅通常由透明和不透明的条纹组成,当光线照射到光栅上时,会产生光信号的变化。
而编码孔则是一些固定在编码盘上的孔洞,当光线照射到编码孔上时,也会产生光信号的变化。
通过检测这些光信号的变化,光电传感器就能够准确地测量出编码盘的位移,进而实现对机械位移的测量。
除了光栅和编码孔,光电编码器中的光电传感器也是至关重要的部分。
光电传感器通常由发光二极管和光敏电阻组成,发光二极管负责发射光线,而光敏电阻则负责接收光信号。
当光线照射到光敏电阻上时,其电阻值会发生变化,通过测量这种变化,就能够准确地检测出光栅和编码孔所产生的光信号变化,从而实现对机械位移的测量。
总的来说,光电编码器通过光电传感器和编码盘之间的互动,能够准确地测量机械位移,将其转换成数字信号输出。
光栅和编码孔作为光电编码器的核心部件,能够产生光信号的变化,而光电传感器则能够准确地检测这些光信号的变化,从而实现对机械位移的准确测量。
光电编码器在工业自动化控制系统中有着广泛的应用,其工作原理的深入理解对于工程师和技术人员来说至关重要。
光电编码器的工作原理

光电编码器的工作原理光电编码器是一种常见的位置传感器,通常用于测量旋转或线性运动的位置和速度。
它利用光电效应将光信号转换为电信号,从而实现位置和速度的测量。
本文将介绍光电编码器的基本原理、分类、应用和发展趋势。
一、光电编码器的基本原理光电编码器由光电传感器和光栅盘(或光纤光栅)两部分组成。
光电传感器通常采用光电二极管或光敏电阻等光电元件,用于将光信号转换为电信号。
光栅盘是一种具有透明和不透明区域的圆盘,它通过旋转或线性运动来改变透明和不透明区域的位置,从而产生光脉冲。
光栅盘的透明和不透明区域可以是等宽度的,也可以是不等宽度的,这取决于光电编码器的分辨率要求。
光电编码器的工作原理可以分为两种基本类型:增量式和绝对式。
增量式光电编码器通过检测光栅盘的旋转或线性运动,产生一个脉冲序列,每个脉冲对应一个固定的角度或距离。
这个脉冲序列可以用来计算位置和速度。
增量式光电编码器通常具有高分辨率和高速度,但不能直接确定绝对位置。
绝对式光电编码器通过光栅盘上的编码信息,可以直接确定光栅盘的绝对位置。
这些编码信息可以是二进制码、格雷码或绝对码。
绝对式光电编码器通常具有高精度和高可靠性,但价格较高。
二、光电编码器的分类根据光栅盘的类型,光电编码器可以分为光栅式和光纤光栅式两种。
光栅式光电编码器的光栅盘是一个圆盘,通常由玻璃或金属制成。
光栅盘上的光栅通常是一系列等宽度的透明和不透明区域,可以通过光学显微镜观察。
光栅式光电编码器通常具有高分辨率和高精度,但需要较高的制造成本和安装精度。
光纤光栅式光电编码器的光栅盘是一个由光纤组成的线性结构,通常由光纤束和衬套组成。
光纤光栅式光电编码器的光栅通常是一系列等宽度的透明和不透明区域,可以通过光学显微镜观察。
光纤光栅式光电编码器通常具有较低的制造成本和安装精度,但分辨率和精度较低。
三、光电编码器的应用光电编码器广泛应用于机械、自动化、航空、航天、轨道交通、医疗等领域。
以下是一些典型的应用场景:1、机床和机器人的位置和速度控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
只介绍V扫描法 :
V扫描法是在最低位码道上安装一电刷,其他位 码道上均安装有两个电刷:一个电刷位于被测位置的 前边,称为超前电刷;另一个放在被测位置的后边, 称为滞后电刷。
光电式编码器(码盘式编码器)
结构 工作原理 提高分辨率的方法
光电式编码器的结构、工作原理
光电式编码器的最大特点是非接触测量,允许高速转动 它是采用光电原理制成。 包括:光源、光学系统、码盘、光电元件和测量电路
应用:
长春第一光学仪器厂生产的CHA系列实心轴增量式编码器, 其外径 40,轴径 6
码盘:在码盘上按照编码的图形,制作出磁化区和
非磁化区
电刷:采用小型的磁环或马蹄形磁芯作为磁头。磁头
上有两组绕组线圈,一组是激励线圈,另一组是输出 线圈。
脉冲盘式数字传感器
结构 工作原理 旋转方向的判 断
脉冲盘式数字传感器的结构和工作原理
脉冲盘式编码器又称为增量编码器,它不能直接 产生几位编码输出。
接触式编码器(码盘式编码器)
结构 工作原理 提高精度的途径
结构和工作原理
接触式编码器由码盘和电刷组成 码盘:是利用2-1码等)的盘 式印刷电路板。
电刷:是一种活动触头结构,在外界力的作用
下旋转码盘时,电刷与码盘接触处就产生某种 码制的某一数字编码输出。
0000 0001 0011 0010 0110 0111 0101 0100 1100 1101 1111 1110 1010 1011 1001 1000
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
2、扫描法:
这种方法的原理是根据二进制码的特点设计的。二 进制码是从最低位向高位逐级进位的,最低位变化最 快,高位逐渐减慢。 扫描法有V扫描、U扫描以及M扫描。
工作原理:(以四位二进制码盘为例 )
8421码: 是最基本、最简单 的二进制码,是用 四位 二进制来表示 一位等值的十进制 数,共十六种组合。
以8421制作的码盘和旋转轴固定在一起。 码盘上有四圈码道,相应地,对应码道上有一个电刷。四 个电刷沿着一个固定的径向 安装。
涂黑处为导电区,电刷接触导电部分时,输出高电平(“1”) 白处为绝缘区 ,电刷接触绝缘部分时,输出低电平(“0”)
角 度
电刷位置 二进制码(B) 循环码(R) 十进制数
0 1 2 3 4 5 6 7
8
9 10 11 12 13 14 15
a b c d e f g h i j k l m n o p
0000 0001 0010 0011 0100 0101 0110 0111 1000 1001 1010 1011 1100 1101 1110 1111
码盘:光电式编码器的码
盘是一块圆形的光学玻璃,采 用照相腐蚀工艺,在码盘上刻 出透光和不透光的码形。并采 用光电转换元件代替接触式编 码器地电刷。
光电编码器的精度取决于码盘的精度。
提高分辨率的方法——插值法
若码盘已有14条(位)码道,在14位的码道上增加1 条专用附加码道,如图:
电磁式编码器
在数字式传感器中,电磁式编码器是近年发展起来的一 种新型电磁敏感元件,它是随着光电式编码器的发展而发展起 来的。光电式编码器的主要缺点是对潮湿气体和污染敏感,但 可靠性差,而电磁式编码器不易受尘埃和结露影响,同时其结 构简单紧凑,可高速运转,响应速度快(达500~700kHz), 体积比光电式编码器小,而成本更低,且易将多个元件精确地 排列组合,比用光学元件和半导体磁敏元件更容易构成新功能 器件和多功能器件。
编码器的分辨率取决于码道的数目n
360 n 2
位数越多,分辨精度越高。当然分辨精度越 高,对码盘和电刷的制作和安装要求越严格。一 般取n<9
存在问题:
由于四个电刷扫描的不同步引起错码
产生非单值误差
另外:电刷安装不精确引起的机械偏差,码盘制作和 安装不准
提高精度的途径:(防止错码出现)
1、采用循环码盘: 循环码的特点 是相邻两个数码间 只有一位变化,即 使制造或安装不精 确,产生的误差最 多也只是最低位, 在一定程度上可消 除非单值误差。因 此采用循环码盘比 8-4-2-1码盘的精度 更高。
有三个码道:最外圈——零位码道 中间——外圈A码道 最内圈——B码道
脉冲盘式编码器只能用于测量相对于上一次的角度 增量,因此称为增量式编码器。 它的精度取决于码盘的精度。
脉冲盘式编码器的辨向方式
设计A、B码道就是实现辨向功能
脉冲盘式编码盘两个码道产生的光电脉冲被两个光 电元件接收,产生A、B两个输出信号,这两个输出信 号经过放大整形后,产生P1和P2脉冲,将它们分别接 到D触发器的D端和CP端。
第五章 编码器
分类 接触式编码器(结构、工作原理、提高精度的 途径) 光电式编码器(结构、工作原理、提高分辨率 的方法) 电磁式编码器 脉冲盘式数字传感器(结构、工作原理、旋转 方向的判断) 应用
分类:
编码器主要分为 脉冲盘式(增量编码器) 码盘式(绝对编码器)
接触式
码盘式
电磁式 非接触式编码器 光电式