交通红绿灯模型
红绿灯模型

交叉路口是道路通行能力的关键所在,对交叉路口的交通流进行优化,已成为增强道路通行能力,缓解交通拥堵的重要途径。
所谓信号灯实时动态控制就是根据交通流的大小实时地调整信号灯的绿信比和周期长,以达到交叉口通过车辆能力尽可能大而平均滞留车辆数或平均延误时间尽可能小的目标。
韦伯斯特模型:t=c(1−λ)221−λx +x22q(1−x)t为每辆车的平均延误时间;C为信号周期时长;λ为绿信比,即有效绿灯时间与信号周期时间的比率;q为车流量;s为饱和流量;x为饱和度,即观测最大流量与信号交叉口进口道的通行能力之比,q/λs.考虑使车辆总延误时间最少,用近似解决该模型,得到定时信号最佳周期时长C=1.5L+51−φ, 式中:L为每个周期的总损失时间包括信号灯的转换时间和车辆的起动损失时间;φ为组成周期的全部信号相位最大的饱和度φi之和,φ=max(φ1, φ2……)目前大多数交通路口只采用该模型确定最佳周期,对于绿信比的确定一般采取平均制或是按经验固定绿信比,不能实时地调控,应用效果并不理想;本文根据路口的交通流量情况,就实时分配绿信比做了具体的研究和探讨。
设第K - 1 周期末各路口滞留的车辆数分别为q k−11,q k−12,q k−13,q k−14,q k−15,q k−16,q k−17,q k−18下记q k−1j即表示第k-1周期第j方向的车辆数设第K 周期内预测从各路口流入的车辆数分别为q k1,q k2,q k3,q k4,q k5,q k6,q k7,q k8下标q kj表示第k周期第j方向的车辆数。
在运行中,若交叉口第i相位已经进行了k-1个周期( K = 1 , 2 , 3 , ⋯) 当K - 1 周期结束时, 还有q k−1j辆车没有通过, 同时与下一周期内预测流入的车q kj一起进入第K 周期系统中. 这时系统则有q k−1j+q kj(j=1,2,…8)辆车.目前关于预测车流量的模型有许多如常见的有:根据最小二乘逼近原理应用指数平滑预测方法模型.,基于模糊神经网络的确信号交叉口的交通预测以及利用Kalman滤波等或者通过信号检测系统来检测下个周期的车流量,这里不再赘述。
基于大数据的交通红绿灯控制模型研究
基于大数据的交通红绿灯控制模型研究一、导言交通拥堵一直是城市的重要问题,特别是随着城市化的进程,车辆数量日益增加,交通状况越来越复杂。
而红绿灯控制作为交通管理的重要手段,一直是改善城市交通状况的重点研究方向。
如何在提高交通效率的基础上避免交通拥堵,成为研究学者们长期以来的关注点。
本文将探讨基于大数据的交通红绿灯控制模型,以此为基础来优化城市交通流量。
二、交通红绿灯控制方法交通红绿灯控制方法根据控制器连接的信号源数量和信号控制方式的不同,可分为集中控制和分散控制两类。
1. 集中控制集中控制是指将多个路口的交通信号灯集中控制在一个中心控制室内,通过半导体系统控制全部或部分路口。
集中控制的优点是节省了人力和物力成本,能够实现快速调度,并在控制范围内实现快速的座标控制。
但也存在缺点,如系统复杂、成本高、运营管理困难等。
2. 分散控制分散控制主要是通过将控制器集群方式,将交通信号灯的控制分散到各个路口,每个控制器控制一个路口的交通灯。
分散控制的优点是系统可维护性好,管理简单,可通过互联网、WIFI、移动通信等方式实现调度,不受通信传输距离的限制,有响应速度快的优点,但同时也存在调度控制困难的问题。
三、基于大数据的交通红绿灯控制模型随着科技的发展,大数据逐渐成为一个热门话题。
在城市交通中,明确交通状态是实现交通优化控制的前提条件。
而通过数据采集和分析、掌握交通运行状态,就成为基于大数据交通红绿灯控制模型的关键。
通过大数据采集,可以获取各路口车辆数量、行驶速度等信息,通过算法分析,就可以实现交通灯的自适应控制。
同时,通过将不同路口的数据进行横向整合,可实现交通信号控制的智能化、精细化和动态化。
基于大数据的交通红绿灯控制模型既可以实时调度,也可以事前规划。
在实时交通管控方面,系统可以及时监测交通拥堵点和瓶颈路口,对交通信号进行实时调度,最大限度地减少通行时间和等待时间。
四、基于大数据的交通流量优化实例以北京某路口为例,研究基于大数据的交通红绿灯控制模型,优化交通流量。
交通路口红绿灯模

交通路口红绿灯模交通路口红绿灯模一.问题的背景与提出在全世界每个国家都会有堵车等交通问题,在我国也不例外,而红绿灯的设计就是有效的缓解并解决交通堵塞的问题.结合实际设计十字路口一个红绿灯模型,并确定一个红绿灯的时间长度使其可以缓解交通堵塞.方案一:二. 假设和参变量:为了研究为方便我们假设:1.十字路口秩序良好 , 不会发生堵塞。
2.所有的车辆都相同 , 并且都是从静止状态匀加速启动加速度相同, 直到相同的最大速度 .3.红灯时白线前等待的相邻两辆车之间的距离相等。
4. 前一辆车启动后,下一辆车启动的延迟时间相等。
5各个方向的绿灯时间相同(这仅是为了研究问题方便,可能会与实际有所偏差)6我们只研究交通高峰期的情况,所以车是源源不断来的,且来的速度是匀速,且各个道口的车辆到来是相互独立的。
7 十字路口东西南北四个方向各有直行道一个,左右行道各一个 .交通路口模型:图中按上北下南参量 :以南北方向绿灯开始亮的时候为时刻t=0.考虑黄灯时,如图我们标注一条黄线,黄灯线与停止线之间的距离L0十字路口的宽度度为H路口每个车道车辆增速为N(t)辆/秒, N-S直行车辆所需要的时间是T1, N-S 方向向左转及向右转的时间T2 W-E 直行车辆所需要的时间是T3=T1, W-E 方向向左转及向右转的时间 T4=T2红黄绿灯一个周期TT=T1+T1'+T2+T2'+T3+T3'+T4+T4'=4(T1+T') (由对称性与随机性可得 T1=T2=T3=T4,T' 为黄灯亮的时间)汽车的长度 L,速度红灯时等待的相邻的两辆车之间的距离a 最高时速为v*D 相邻两辆汽车启动的延迟时间T 汽车的加第 n 辆车到达限速的时间tn*间时刻 t 表示第tt 1.黄灯模型n 辆汽车所在的位置Sn(t) 第 n 辆汽车开始启动的时间tn 司机反映时黄灯这段时间里,要求里十字路口近的车通过路口,远的车则开始减速在白线前停下来 L0=v*tt+(v*^2)/2aT'=max (tt+v*/a, (L0+H)/v*) 2. 绿灯模型:红灯时车都排在白线后面等待绿灯亮,且我们模拟交通高峰期的情况,车会连绵不断的到来,且来的车流不会停止。
红绿灯模型论文_学位论文
红绿灯模型摘要许多大中城市的交通拥阻造成了时间的浪费、工作的耽误和心理的烦躁,直接、间接带来了相当大的经济损失。
缓解拥阻需要多方努力、综合治理,现在请就你所了解的城市的情况,应用数学建模方法提出、分析并探讨解决城市交通拥阻问题的办法。
下面的问题只是一个十字路口的典型环境下相当简化的情形,不一定限于此。
作为城市交通的指挥棒,红绿灯对交通的影响起着决定性作用。
如果红绿灯的设置不合理,不仅会影响到交通秩序;还有可能会影响到行人和自行车的安全。
目前我市还有很多路口的红绿灯设置存在一些不合理的因素,例如一些路口是刚开通的,交管部门对路况和车流量的研究还不是很成熟,因此红绿灯的设置存在一些问题。
而有些路口的车流量相对比较小,甚至有几个方向的车流量特别小,但绿灯时间设置太长,经常出现路口空荡荡但是车辆必须长时间等待的情况;同时在这样的路口,右转红灯显得有些多余。
另外,该路口不同时段的红绿灯设置没有什么区别,显然这是非常不合理的。
下面我们就针对漳州职业技术学院与少体校间的十字路来研究一下红绿灯设置的合理方案。
我们主要研究两个方面:红绿灯周期的设置以及一个周期内各个方面开绿灯的时间。
在车辆拥挤的交叉路口,需要合理地调节各条车道安置的红绿灯,使车辆能够顺利、有效地通过。
关键词:红绿灯设置、红绿灯周期、红绿灯模型、十字路口一、问题的重述红灯停、绿灯行,红绿灯对交通的影响起着决定性作用。
如果红绿灯的设置不合理,不仅会影响到交通秩序,还有可能会影响到行人和自行车的安全。
目前漳州职业技术学院与少体校间的十字路口正在设置红绿灯,因为是学校附近,存在着上下课时的短暂高峰期人流,并且随着西洋坪大桥的投入使用及漳华路到胜利西路的直接开通,产生了大量的车流。
请你根据漳州目前的实际情况,对于漳州职业技术学院与少体校间的十字路口的红绿灯设置一个合理的红绿灯周期以及一个周期内各个方向开绿灯的时间。
二、问题分析随着漳州经济的增长,人们的收入日渐增加,越来越多私人车产生,加上人口也会随之增长且农村人口进入城镇,交通问题解决成为了一件重大事情。
交通红绿灯PPT模板

智能交通系统中的红绿灯
总结词
智能交通系统中的红绿灯是未来交通信号控制的发展方向,通过与智能车辆、智能道路 等技术的结合,实现更加高效、安全的交通管理。
详细描述
智能交通系统中的红绿灯通过与智能车辆、智能道路等技术的结合,实现车路协同、自 动驾驶等功能。通过实时监测交通状况和车辆行驶轨迹,智能红绿灯能够与智能车辆进 行信息交互,实现更加高效、安全的交通管理。同时,智能红绿灯还可以与其他交通管
理设施进行联动,提高整个交通系统的运行效率和安全性。
04
交通红绿灯的应用场景
城市道路交通
城市道路交通是交通红绿灯应用最广泛的场景之一。在繁忙 的城市交通中,红绿灯起到了至关重要的作用,控制车辆和 行人的通行,保障交通秩序和安全。
交通红绿灯的设置应充分考虑道路的宽度、车流量和行人流 量等因素,合理设置红绿灯的时间和配比,提高道路通行效 率。
感应控制的红绿灯
总结词
感应控制的红绿灯能够根据路口车流量实时调整信号灯的变换时间,以适应交通 流的变化。
详细描述
感应控制的红绿灯通过安装在地面的感应器检测车流量和车辆等待情况,根据实 时交通状况调整信号灯的变换时间。这种控制方式能够更好地应对交通流量的变 化,减少车辆等待时间,提高路口通行效率。
自适应控制的红绿灯
红灯
禁止通行,车辆和行人应在交叉 口等待。
绿灯
允许通行,但需注意交叉口情况, 确保安全。
黄灯
警示信号,表示即将切换信号灯, 需减速慢行或停车等待。
培养良好的交通安全习惯
定期检查车辆安全性 能,确保车辆安全上 路。
注意观察路面情况, 提前做好应对措施。
保持车距,避免追尾 事故。
谢谢观看
适应性调整
NetLogo模型讲解:交通模型 Traffic Grid(街区、红绿灯)
]
turtles-own 表示主体的拥有的属性,这里的主体就是车辆,表示车辆拥有的属性
pቤተ መጻሕፍቲ ባይዱtches-own
[
intersection? ;; 是不是十字交叉口
green-light-up? ;; 绿灯是不是在交叉口
my-row
;; the row of the intersection counting from the upper left corner of the
本文档由 netlogo 爱好者编,如有不足,请见谅! 模型位置 :模型库->Sample Models ->Social Science->Traffic Grid 利用 NetLogo 模拟现实当中带街区的交通流,在道路上同时拥有红绿灯。交通模拟模型在模 型库中还有好多模型,大家有需要的话可以去参考! 通过将瓦片着不同的颜色,同时设置一些属性,模拟我们现实生活中的街区,道路,红绿灯。 海龟,就是这里面可以移动的汽车。
;;找到一个空的地方初始化的时候放置车辆 to put-on-empty-road ;; turtle procedure
move-to one-of roads with [not any? turtles-on self] end
上面都是定义一些初始设置,如海龟汽车是怎么放置的,瓦片形成街区,道路和十字交叉路 口,下面就是程序运行。
原语学习: floor floor number 返回小于等于 number 的最大整数 random random number 如果 number 为正,返回大于等于 0、小于 number 的一个随机整数。 如果 number 为负,返回小于等于 0、大于 number 的一个随机整数。 如果 number 为 0,返回 0。 heading 这是一个内置海龟变量,指明海龟面向的方向,该值在[0,360)。0 是北,90 是东,等等。设 置这个变量实现海龟转动。
十字路口交通灯Proteus仿真

《微机原理与接口技术》课程设计报告题目:十字路口交通灯设计学院:信息工程学院专业:通信工程目录1、摘要 (1)2、硬件电路图 (2)3、AT89C51功能介绍 (3)4、交通灯程序设计思路 (5)5、交通灯运行流程图 (6)6、源代码函数说明 (6)7、交通灯设置红绿灯时间结果图 (8)8、心得与体会 (9)9、源程序代码 (10)摘要十字道口的红绿灯是交通法规的无声命令,是司机和行人的行为准则。
十字道口的交通红绿灯控制是保证交通安全和道路畅通的关键。
当前,国内大多数城市正在采用“自动”红绿交通灯,它具有固定的“红灯—绿灯”转换间隔,并自动切换。
它们一般由“通行与禁止时间控制显示、红黄绿三色信号灯和方向指示灯”三部分组成。
通常,生活中常见的红绿灯控制为,红灯六十秒,绿灯四十五秒,黄灯三秒等,因道路,车辆,城市交通规划而异,此次,基于proteus仿真十字路口的交通灯控制系统,设定南北方向绿灯15秒,黄灯5s,东西方向绿灯10s,黄灯5s。
系统基于MSC-51系列单片机89C51为中心器件来设计交通灯,显示器件为LED 红绿灯,LCD数码管。
采用c51编程,简单易懂,将功能模块化,除了可以实现红绿灯按要求变化,还通过proteus里的按钮,设置了键盘函数,可以按要求调整红绿灯亮的时间,并且还有重置(初始化)按钮。
一.功能概述1.设计任务:交通灯的硬件设计和软件设计2.设计目的:(1).初步了解和认识51单片机的工作原理,引脚图。
(2).掌握单片机相关接口技术和相关外围芯片的特性。
( 3 ).通过实际的设计程序,查找资料,调试程序,熟悉keil和proteus软件仿真,理解并熟悉模块化程序设计方法和调试。
3.基本要求:利用单片机的定时器产生秒信号,控制十字路口的红、绿、黄灯交替点亮和熄灭,并且用 4 只LED 数码管显示十字路口两个方向的剩余时间。
当东西方向亮绿灯时,南北方向红灯亮起;反之,如果南北方向亮绿灯,同时东西方向亮绿灯;绿灯亮时车辆行驶,红灯亮时车辆停止。
例2 交通路口红绿灯的模型
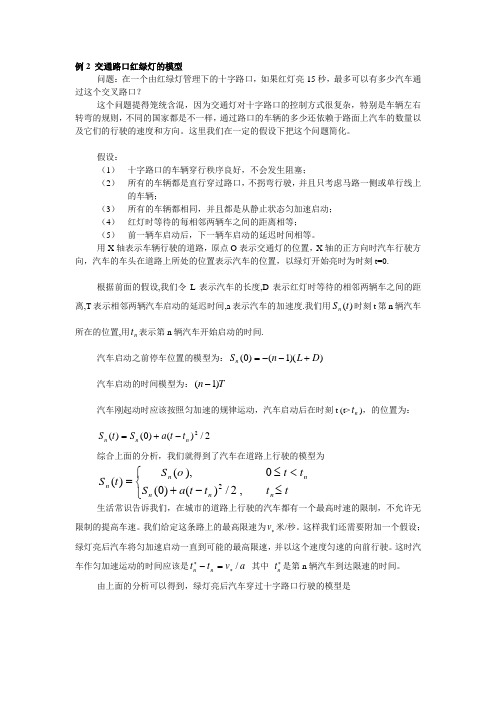
例2 交通路口红绿灯的模型问题:在一个由红绿灯管理下的十字路口,如果红灯亮15秒,最多可以有多少汽车通过这个交叉路口?这个问题提得笼统含混,因为交通灯对十字路口的控制方式很复杂,特别是车辆左右转弯的规则,不同的国家都是不一样,通过路口的车辆的多少还依赖于路面上汽车的数量以及它们的行驶的速度和方向。
这里我们在一定的假设下把这个问题简化。
假设:(1) 十字路口的车辆穿行秩序良好,不会发生阻塞;(2) 所有的车辆都是直行穿过路口,不拐弯行驶,并且只考虑马路一侧或单行线上的车辆;(3) 所有的车辆都相同,并且都是从静止状态匀加速启动;(4) 红灯时等待的每相邻两辆车之间的距离相等;(5) 前一辆车启动后,下一辆车启动的延迟时间相等。
用X 轴表示车辆行驶的道路,原点O 表示交通灯的位置,X 轴的正方向时汽车行驶方向,汽车的车头在道路上所处的位置表示汽车的位置,以绿灯开始亮时为时刻t=0.根据前面的假设,我们令L 表示汽车的长度,D 表示红灯时等待的相邻两辆车之间的距离,T 表示相邻两辆汽车启动的延迟时间,a 表示汽车的加速度.我们用)(t S n 时刻t 第n 辆汽车所在的位置,用n t 表示第n 辆汽车开始启动的时间.汽车启动之前停车位置的模型为:))(1()0(D L n S n +--=汽车启动的时间模型为:T n )1(-汽车刚起动时应该按照匀加速的规律运动,汽车启动后在时刻t (t>n t ),的位置为: 2/)()0()(2n n n t t a S t S -+=综合上面的分析,我们就得到了汽车在道路上行驶的模型为⎩⎨⎧≤-+<≤=t t t t a S t t o S t S n n n n n n ,2/)()0(0),()(2生活常识告诉我们,在城市的道路上行驶的汽车都有一个最高时速的限制,不允许无限制的提高车速。
我们给定这条路上的最高限速为*v 米/秒。
这样我们还需要附加一个假设;绿灯亮后汽车将匀加速启动一直到可能的最高限速,并以这个速度匀速的向前行驶。