智能控制习题
(完整版)智能控制习题参考答案
5.比较模糊集合和普通集合的异同。
答:
集
异
合
同
点
相同点
不同点
普通集合
模糊集合
1,基本概念相同:具有某种特定属性的对象的全体。 2,分类方法大致一样,如:列举法,描述法,特征函数法
3,运算规律大致相同,如:恒等律,交换律,结合律,分配律,吸收 律,同一律,对偶律
元素的范围有个清晰的界限 互补律仍然适用
3,污染性:复杂生产制造过程的信息都会受到污染,但在不同层次的信息受干扰程度 不同,层次较低的信号受污染程度较大。
二、获取方式 信息主要是通过传感器获得,但经过传感器后要经过一定的处理来得到有效的信息, 具体处理方法如下: 1,选取特征变量 可分为选择特征变量和抽取特征变量。 选择特征变量直接从采集样本的全体原始工艺参 数中选择一部分作为特征变量。抽取特征变量对所选取出来的原始变量进行线性或非线性 组合,形成新的变量,然后去其中一部分作为特征变量。
变换,在时间域和频率域同时具有良好的定位能力,从而被誉为
"数学显微镜 "。
6, IHS 变换 3 个波段合成的 RGB 颜色空间是一个对物体颜色属性描述系统,
而 IHS 色度空间提取
出物体的亮度 I,色度 H,饱和度 S,它们分别对应 3 个波段的平均辐射强度、 3 个波段的
数据向量和的方向及 3 个波段等量数据的大小。 RGB 颜色空间和 IHS 色度空间有着精确的
u(50)=30/30=1
u(55)=30/30=1
u(60)=30/30=1
u(65)=29/30=0.967
u(70)=24/30=0.8
低智商曲线:
u(75)=14/30=0.467
35— 70 30— 65 40— 75 30— 65 30— 70 30— 70
智能控制课后习题

作业11 简述智能控制的概念。
定义一: 智能控制是由智能机器自主地实现其目标的过程。
定义二:K.J.奥斯托罗姆则认为,把人类具有的直觉推理和试凑法等智能加以形式化或机器模拟,并用于控制系统的分析与设计中,以期在一定程度上实现控制系统的智能化,这就是智能控制。
定义三: 智能控制是一类无需人的干预就能够自主地驱动智能机器实现其目标的自动控制,也是用计算机模拟人类智能的一个重要领域。
2 智能控制由哪几部分组成?各自的特点是什么?智能控制由人工智能、自动控制、运筹学组成。
人工智能是一个知识处理系统,具有记忆、学习、信息处理、形式语言、启发推理等功能。
自动控制描述系统动力学特性,是一种动态反馈。
运筹学是一种定量优化的方法。
如线性优化,网络规划,调度管理,优化决策和多目标优化的方法等等。
3 比较智能控制和传统控制的特点?1)传统控制方法在处理复杂性、不确定性方面能力低而且有时丧失了这种能力,智能控制在处理复杂性、不确定性方面能力高2)传统控制是基于被控对象精确模型的控制方式,可谓“模型论”智能控制是智能决策论,相对于“模型论”可称为“控制论”3)传统的控制为了控制必须建模,而利用不精确的模型又采用摸个固定控制算法,使整个的控制系统置于模型框架下,缺乏灵活性,缺乏应变性,因此很难胜任对复杂系统的控制智能控制的可信是控制决策,次用灵活机动的决策方式迫使控制朝着期望的目标逼近。
4)传统控制适用于解决线性、时不变等相对简单的的控制问题智能控制是对传统控制理论的发展,传统控制室智能控制的一个组成部分,是智能控制的低级阶段。
4 智能控制有哪些应用领域?试举出一个应用实例。
应用领域:模糊系统、神经网络、专家控制、工业想、系统、电力系统、机器人等其他领域的控制。
应用实例:模糊控制的交流伺服系统作业21.在完成上次作业的基础上,进一步细化,给出使用智能控制的必要性 ,以及智能控制结果的验证比较方法;传统控制方法包括经典控制和现代控制,是基于被控对象精确模型的控制方式,缺乏灵活性和应变能力,只适用于解决线性、时不变线等相对简单的控制问题。
智能控制考试题及答案

智能控制技术考试题及答案《智能控制技术》考试试题A《智能控制》课程考试试题A参考答案一、填空题(1) OPEN (2) 最有希望 (3) 置换 (4) 互补文字 (5) 知识库(6) 推理机 (7) 硬件 (8) 软件 (9) 智能 (10) 傅京孙(11) 萨里迪斯 (12) 蔡自兴 (13) 组织级 (14) 协调级(15) 执行级 (16) 递阶控制系统 (17) 专家控制系统(18) 模糊控制系统 (19) 神经控制系统 (20) 学习控制系统二、选择题1、D2、A3、C4、B5、D6、B7、A8、D9、A 10、D三、问答题1、答:传统控制理论在应用中面临的难题包括:(1) 传统控制系统的设计与分析是建立在精确的系统数学模型基础上的,而实际系统由于存在复杂性、非线性、时变性、不确定性和不完全性等,一般无法获得精确的数学模型。
(2) 研究这类系统时,必须提出并遵循一些比较苛刻的假设,而这些假设在应用中往往与实际不相吻合。
(3) 对于某些复杂的和包含不确定性的对象,根本无法以传统数学模型来表示,即无法解决建模问题。
(4) 为了提高性能,传统控制系统可能变得很复杂,从而增加了设备的初投资和维修费用,降低系统的可靠性。
传统控制理论在应用中面临的难题的解决,不仅需要发展控制理论与方法,而且需要开发与应用计算机科学与工程的最新成果。
人工智能的产生和发展正在为自动控制系统的智能化提供有力支持。
人工智能影响了许多具有不同背景的学科,它的发展已促进自动控制向着更高的水平──智能控制发展。
智能控制具有下列特点:(1) 同时具有以知识表示的非数学广义模型和以数学模型(含计算智能模型与算法)表示的混合控制过程,也往往是那些含有复杂性、不完全性、模糊性或不确定性以及不存在已知算法的过程,并以知识进行推理,以启发式策略和智能算法来引导求解过程。
(2) 智能控制的核心在高层控制,即组织级。
高层控制的任务在于对实际环境或过程进行组织,即决策和规划,实现广义问题求解。
《智能控制》题集
《智能控制》题集一、选择题(共10小题,每小题3分)1.智能控制是基于哪种理论发展起来的一种新型控制方法?()A. 经典控制理论B. 现代控制理论C. 人工智能与自动控制理论相结合D. 模糊数学理论答案:C解析:智能控制是人工智能与自动控制理论相结合的产物,它利用人工智能的方法和技术,对复杂的非线性系统进行控制,具有自学习、自组织和自适应的能力。
2.下列哪项不属于智能控制的主要特点?()A. 能够处理复杂的非线性系统B. 依赖于精确的数学模型C. 具有自学习和自适应能力D. 能够实现多目标优化控制答案:B解析:智能控制的一个显著特点是能够处理复杂的非线性系统,并且不依赖于精确的数学模型,而是通过学习和适应来实现控制目标。
3.模糊控制是智能控制的一个重要分支,其核心思想是什么?()A. 利用模糊逻辑进行推理和控制B. 精确计算控制量C. 依赖于系统的精确数学模型D. 仅适用于线性系统答案:A解析:模糊控制的核心思想是利用模糊逻辑进行推理和控制,它允许使用模糊的语言变量和模糊规则来描述系统的行为和控制策略,从而实现对复杂系统的有效控制。
4.神经网络控制在智能控制中扮演什么角色?()A. 仅仅是一种数据处理方法B. 能够模拟人脑的学习和记忆功能C. 仅适用于静态系统D. 无法处理非线性问题答案:B解析:神经网络控制在智能控制中扮演着重要角色,它能够模拟人脑的学习和记忆功能,通过训练和学习来适应系统的变化,实现对非线性系统的有效控制。
5.专家系统在智能控制中的主要作用是什么?()A. 提供精确的数学模型B. 模拟人类专家的决策过程C. 仅用于故障诊断D. 无法处理不确定性问题答案:B解析:专家系统在智能控制中的主要作用是模拟人类专家的决策过程,通过知识库和推理机制解决复杂控制问题,提供精确的控制策略和调整建议。
6.遗传算法在智能控制中常用于哪方面的优化?()A. 控制参数优化B. 系统模型建立C. 数据处理D. 故障诊断答案:A解析:遗传算法在智能控制中常用于控制参数的优化,通过模拟自然选择和遗传机制,对控制参数进行编码、选择、交叉和变异等操作,不断迭代优化,直到找到最优解或近似最优解。
智能控制习题答案【精选文档】
第一章绪论1。
什么是智能、智能系统、智能控制?答:“智能"在美国Heritage词典定义为“获取和应用知识的能力”。
“智能系统"指具有一定智能行为的系统,是模拟和执行人类、动物或生物的某些功能的系统。
“智能控制”指在传统的控制理论中引入诸如逻辑、推理和启发式规则等因素,使之具有某种智能性;也是基于认知工程系统和现代计算机的强大功能,对不确定环境中的复杂对象进行的拟人化管理。
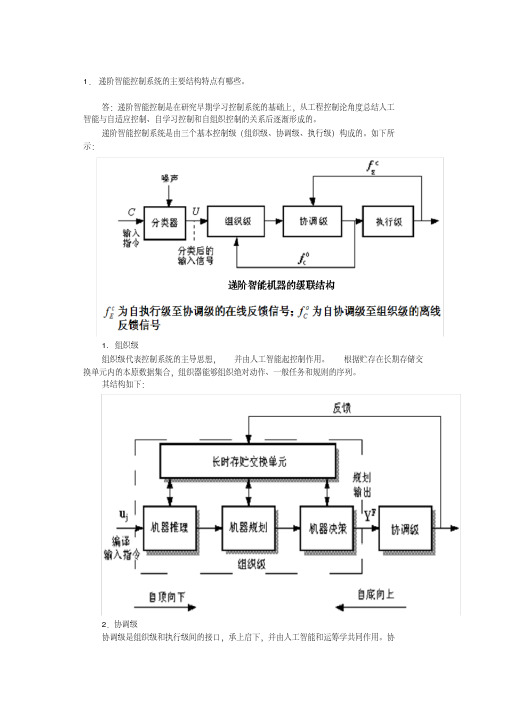
2.智能控制系统有哪几种类型,各自的特点是什么?答:智能控制系统的类型:集散控制系统、模糊控制系统、多级递阶控制系统、专家控制系统、人工神经网络控制系统、学习控制系统等。
各自的特点有:集散控制系统:以微处理器为基础,对生产过程进行集中监视、操作、管理和分散控制的集中分散控制系统。
该系统将若干台微机分散应用于过程控制,全部信息通过通信网络由上位管理计算机监控,实现最优化控制,整个装置继承了常规仪表分散控制和计算机集中控制的优点,克服了常规仪表功能单一,人机联系差以及单台微型计算机控制系统危险性高度集中的缺点,既实现了在管理、操作和显示三方面集中,又实现了在功能、负荷和危险性三方面的分散.人工神经网络:它是一种模范动物神经网络行为特征,进行分布式并行信息处理的算法数学模型。
这种网络依靠系统的复杂程度,通过调整内部大量节点之间相互连接的关系,从而达到处理信息的目的.专家控制系统:是一个智能计算机程序系统,其内部含有大量的某个领域专家水平的知识与经验,能够利用人类专家的知识和解决问题的经验方法来处理该领域的高水平难题。
可以说是一种模拟人类专家解决领域问题的计算机程序系统.多级递阶控制系统是将组成大系统的各子系统及其控制器按递阶的方式分级排列而形成的层次结构系统。
这种结构的特点是:1。
上、下级是隶属关系,上级对下级有协调权,它的决策直接影响下级控制器的动作。
2。
信息在上下级间垂直方向传递,向下的信息有优先权。
同级控制器并行工作,也可以有信息交换,但不是命令.3。
智能控制理论课后习题及复习
二、课后习题
������������������ (������������ ) ������ 根据������ ( ������⁄������������ ) = max(������ (������ ),������ (������ ))可计算得相及矩阵 G 的各项: ������ ������ ������ ������
1
2 ������ − 25 ������������ (x) = ������������(������) ={ {[1 + ( ) ] }2 25 < ������ ≪ 200 5
2 −1
0 ≪ ������ ≪ 25
(2)求“不年老也不年轻 V”的隶属度函数 ̅ ∩ ������ ̅ 不年老也不年轻,即V = ������ ̅: ������ 1 ������ − 50 ������������ ̅ (x) = 1 − ������������ (x) = { 1 − [1 + ( ) ] 5 ̅: ������ 0 ������������ ̅ (x) = 1 − ������������ (x) = { 所以: ������������ (x) = ������������ ̅ ∧ ������������ ̅ (x),������������ ̅ = min{������������ ̅ (x)} 1 − [1 + ( ������ − 25 ) ] 5
一、重点内容
1.隶属度函数的定义。 (教材 P16) 2.模糊集合的定义及表示法。 (教材 P17) 3.模糊集合的运算与基本性质。 (教材 P18,P19) 4.隶属度函数的重叠指数。 (教材 P22) 5.隶属度函数的选择方法。 (教材 P23) 6.隶属度函数的二元对比排序法。 (教材 P24) 7. 各种函数图形类型的隶属度函数适用于什么情况。 (教材 P25,P26) 8.模糊关系定义及表示法。 (教材 P27,P28) 9.模糊关系之直积、代数积。 (教材 P29,P30) 10.模糊关系的合成。 (教材 P31,P32) 11.模糊控制器的设计步骤(教材 P67)
智能控制技术期末考试试题

智能控制技术期末考试试题# 智能控制技术期末考试试题## 一、选择题(每题2分,共20分)1. 智能控制系统的基本特征不包括以下哪一项?A. 自学习能力B. 鲁棒性C. 单一控制策略D. 适应性2. 模糊控制理论的提出者是:A. 瓦迪姆·瓦迪莫维奇·诺维科夫B. 罗纳德·费舍尔C. 洛特菲·A·扎德D. 阿尔伯特·爱因斯坦3. 下列哪项不是智能控制技术的应用领域?A. 机器人技术B. 航空航天C. 传统农业D. 智能制造4. 神经网络在智能控制中的主要作用是:A. 增强系统稳定性B. 实现模式识别C. 减少系统成本D. 提高系统响应速度5. 遗传算法在智能控制中的应用主要用于:A. 优化控制参数B. 实现自适应控制C. 增强系统的鲁棒性D. 进行模式识别## 二、简答题(每题10分,共20分)1. 简述智能控制技术与传统控制技术的主要区别。
2. 解释模糊控制的基本原理,并举例说明其在实际中的应用。
## 三、计算题(每题15分,共30分)1. 假设有一个简单的模糊控制器,其输入变量为温度(T)和湿度(H),输出变量为风扇速度(F)。
给出以下模糊规则:- 如果T是高且H是低,则F是高。
- 如果T是中且H是中,则F是中。
- 如果T是低且H是高,则F是低。
- 请根据上述规则,给出一个模糊控制表,并计算当T=28℃,H=70%时的风扇速度。
2. 考虑一个简单的神经网络,输入层有3个神经元,隐藏层有4个神经元,输出层有1个神经元。
已知输入向量为\[ x = [0.5, 0.2, 0.7] \],隐藏层和输出层的权重矩阵分别为:\[ W_h = \begin{bmatrix} 0.1 & 0.3 & 0.2 \\ 0.4 & 0.1 &0.6 \\ 0.5 & 0.7 & 0.8 \\ 0.9 & 0.5 & 0.3 \end{bmatrix} \]\[ W_o = \begin{bmatrix} 0.2 & 0.4 & 0.1 & 0.3\end{bmatrix} \]假设隐藏层和输出层的激活函数都是Sigmoid函数,计算输出值。
智能控制(研究生)习题集
习题集第一章概论1.试从学科和能力两个方面说明什么是人工智能。
2.哪些思想、思潮、时间和人物在人工智能发展过程中起了重要作用?3.近年来人工智能研究取得哪些重要进展?4.为什么能够用计算机模拟人类智能?5.目前人工智能学界有哪些学派?它们的认知观为何?6.自动控制存在什么机遇与挑战?为什么要提出智能控制?7.简述智能控制的发展过程,并说明人工智能对自动控制的影响。
8.傅京孙对智能控制有哪些贡献?9.什么是智能控制?它具有哪些特点?10.智能控制器的一般结构和各部分的作用为何?它与传统控制器有何异同?11.智能控制学科有哪几种结构理论?这些理论的内容是什么?12.为什么要把信息论引入智能控制学科结构?13.人工智能不同学派的思想在智能控制上有何反映?第二章知识表示方法1.状态空间法、问题归约法、谓词逻辑法和语义网络法的要点是什么?它们有何本质上的联系及异同点?2.设有3个传教士和3个野人来到河边,打算乘一只船从右岸渡到左岸去。
该船的负载能力为两人。
在任何时候,如果野人人数超过传教士人数,那么野人就会把传教士吃掉。
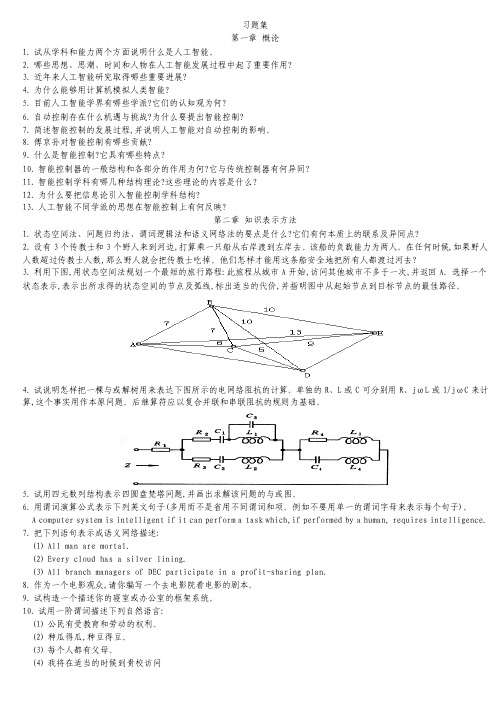
他们怎样才能用这条船安全地把所有人都渡过河去?3.利用下图,用状态空间法规划一个最短的旅行路程:此旅程从城市A开始,访问其他城市不多于一次,并返回A。
选择一个状态表示,表示出所求得的状态空间的节点及弧线,标出适当的代价,并指明图中从起始节点到目标节点的最佳路径。
4.试说明怎样把一棵与或解树用来表达下图所示的电网络阻抗的计算。
单独的R、L或C可分别用R、jωL或1/jωC来计算,这个事实用作本原问题。
后继算符应以复合并联和串联阻抗的规则为基础。
5.试用四元数列结构表示四圆盘梵塔问题,并画出求解该问题的与或图。
6.用谓词演算公式表示下列英文句子(多用而不是省用不同谓词和项。
例如不要用单一的谓词字母来表示每个句子)。
A computer system is intelligent if it can perform a task which,if performed by a human, requires intelligence.7.把下列语句表示成语义网络描述:(1)All man are mortal.(2)Every cloud has a silver lining.(3)All branch managers of DEC participate in a profit-sharing plan.8.作为一个电影观众,请你编写一个去电影院看电影的剧本。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
智能控制习题
1. 比较模糊集合与经典集合的异同。
2. 设某种商品有8个不同的商标,商标构成的论域为},,,{821x x x U =,A 和B 为论域U 上的两个模糊集合,A 表示“商誉高”,B 表示“价格合理”,已知
()3.04.05.06.07.04.06.08.0=A
()7.06.05.04.08.06.04.07.0=B
试计算B A ,B A ,c A ,c B 。
3. 证明:
(1)A B B A =
(2))()(C B A C B A =
(3)A B A A =)(
(4))()()(C A B A C B A =
4. 论域},,,{821x x x U =,A 是U 上的模糊集合,
8
765432155.08.074.082.068.035.092.01x x x x x x x x A +++++++= (1) 写出A 的λ水平截集λA ,9.0,8.0,6.0=λ
(2) 计算8.0,)(,)(=λλλc c A A 。
(自学“模糊集合的截集”)
4. 设6中商品集合为},,,,,{654321x x x x x x U =,
U 上的滞销商品模糊集合为()4.05.06.001.01=A
U 脱销商品模糊集合为()05.0006.01.00=B
U 畅销商品模糊集合为()5.04.04.018.00=C
(1) 求不滞销商品的模糊集合D
(2) 求又滞销有畅销的商品的模糊集合;
(3) 在7.0,5.0=λ时,分别求滞销、脱销和畅销的商品。
5. 计算
⎥⎥⎥⎥⎦
⎤⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡7.03.0005.08.08.07.016.06.04.07.006.07.05.03.011.06.011.05.08.07.04.00 6. 已知模糊矩阵
⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡=18.05.07.04.02.06.03.08.0R , 写出λR ,8.0,7.0=λ(自学该部分)
7. 设有论域},,{321x x x X =,},,{321y y y Y =,},{21z z Z =,二维条件语句为“若A 且B 则C ”,
其中
3
211.015.0x x x A ++= 3
216.011.0y y y B ++= 2114.0z z C +=
已知
3
21*1.05.01x x x A ++= 321*15.01.0y y y B ++=
由前向推理法,求结论*C
8. 已知一个双输入-单输出的模糊系统,其输入变量为x 和y ,输出变量是z ,其输入和输出
关系可以用如下的两条模糊规则描述:
R 1: 如果x 是A 1 and y 是B 1,则z 是C 1
Also R 2: 如果x 是A 2 or y 是B 2,则z 是C 2
现在已知输入x 是A ’ and y 是B ’,求输出量z 。
这里x,y 和z 均为模糊变量,且已知
3
2113.07.00.1a a a A ++=,32111.05.00.1b b b B ++=,32112.05.00.1c c c C ++= 32120.17.03.0a a a A ++=,32120.15.01.0b b b B ++=,3
2120.15.02.0c c c C ++= 3213211.06.02.0',7.00.13.0'b b b B a a a A ++=++= 9. 设有一平面上的两类模式如下表所示
设计单神经元感知器,对样本进行正确分类。
要每步画出决策函数。