连续变量动态规划例子
4.3动态规划的建模与求解

5 5 13 5
k=2
f 2 s 2 max g 2 u 2 f 3 s3
0u 2 s 2
工厂 1 投资额 1 2 3 4.5 7 9
2 2 4.5 7.5
3 5 7 8
sk+1 = sk -uk
s3
u3
f 3 ( s3 )
u3
*
0 0 0
0
1 1 5 1
2 2 7 2
i k n
U k {uk | 0 uk sk }
最优值函数 f k sk :第k阶段可分配的资金数为sk时, 第k至第n个项目的最大总收益 求f1 a
最优值函数 f k sk :在第k阶段分配的资金数为sk时, 第k至第n个项目的最大总收益
建立递推公式:
f k s k
fk( sk ) =在工厂k,可供分配的资金数为sk时, 投资工厂k至工厂3所得的最大总收益 求f1( 5 ) 基本方程: f k s k max g k u k f k 1 s k 1 0u k sk k 3,2,1 f 4 s4 0 f 3 s3 max g 3 u3 k=3 0 u 3 s3 s3 0 4 1 2 3
0
0 0 0
0
4 5 2 3 0 1 0 1 2 0 1 2 3 0 1 2 3 4 0 1 2 3 4 5 5 2 7 7 4.5 8 9 9.5 7.5 10 10 11.512.511 13 12 12.514.5 16 15 12.5 16 5 7 9.5 3 2 4 0 0或1 1 5 3 4 5
解:设A---整个系统正常工作,Ai—部件i正常工作 A A1 A2 An ,
则P A P A1 P A2 P An pi xi
连续确定型动态规划问题

季度
1
2
3
4
销售量qk
600
700
500
1200
季度
1
2
3
每年年初完好机器数和最优策略如下:
S1 = 1000,
x1* = 0
S2 = 900,
x2* = 0
S3 = 810,
x3* = 0
S4 = 729,
x4* = 0
S5 = 656,
x5* = 4.5S5 - 2500 =452
S5 - x5* = 656 - 452 =204
◆ 生产与存贮问题
安排不同时期的生产量(采购量)与库存量,达到既满足用户需求,又使生 产成本和库存费用之和最少.
x1 = 600
x2 = 700 - 1/3S2 = 700
x
3
=
800
-
0.5S3
=
800
x
4
= 1200
- S4
=
900
500=0.7x5+0.9(S5-X5)
x* 5
=4.5S5-2500
k=5时,有f5 (S5 )
=
max{8 x5
x5
+ 5(S5
−
x5 ) +
f6 (S6 )}
= max{8(4.5S5 − 2500) + 5(S5 − 4.5S5 + 2500)}
= 18.5S5 − 7500
连续时间动态规划

16.323讲课4 HJB 方程- 连续时间动态规划 - HJB 方程 - 连续LQR仿真描述:对于对称的Ru u2u uT T R R ∂=∂ uuR R ∂=∂连续时间DPz 已经分析了几个最小化的经典控制问题近似解:min (())((),(),)ft f t J h t g t t t dt =+∫x x u受约束于a(,,)t =xx u 0()t =x 给定值((),)0f f m t t =x()t ∈u U可能约束的集合z 前述方法在时间,状态和控制行为上是离散的- 易于在计算机上实现,但是现在考虑连续时间的精确解- 结果会是非线性偏微分方程叫作Hamilton-Jacobi-Bellman 方程(HJB )- 一个重要的结果。
z 第一步:考虑区间[,]f t t 上的代价,有f tt ≤,其中对任何控制序列()τu ,f t t τ≤≤((),())((),)((),(),)ft f f tJ t h t t g d τττττ=+∫x u x x u- 显然目标就是挑选()τu ,f tt τ≤≤最小化代价。
*()((),)min ((),,())fu t t J t t J t t τττ∈≤≤=u x x uz 方法:- 把时间区间[,]f t t 拆分为[,]t t t +Δ和[,]f t t t +Δ,而且特别感兴趣的情况是0tΔ→- 确定最优的代价函数*((),)J t t t t +Δ+Δx- 确定时间[,]t t t +Δ内的“阶段代价” - 从t 开始找到最佳的策略 - 在HJB 方程里处理{}*()((),)min ((),)((),(),)fft f f tu t t J t t h t t g d ττττττ∈≤≤=+∫u x x x u{}()min ((),)(,,)(,,)fft tt f f tt tu t t h t t g d g d ττττττ+Δ+Δ∈≤≤=++∫∫u x x u x uz 潜在的含义是在时刻t t +Δ,系统将在状态()t t +Δx 。
动态规划算法的详细原理及使用案例

动态规划算法的详细原理及使用案例一、引言动态规划是一种求解最优化问题的算法,它具有广泛的应用领域,如机器学习、图像处理、自然语言处理等。
本文将详细介绍动态规划算法的原理,并提供一些使用案例,以帮助读者理解和应用这一算法的具体过程。
二、动态规划的基本原理动态规划算法通过将问题分解为多个子问题,并利用已解决子问题的解来求解更大规模的问题。
其核心思想是利用存储技术来避免重复计算,从而大大提高计算效率。
具体来说,动态规划算法通常包含以下步骤:1. 定义子问题:将原问题分解为若干个子问题,这些子问题具有相同的结构,但规模更小。
这种分解可以通过递归的方式进行。
2. 定义状态:确定每个子问题的独立变量,即问题的状态。
状态具有明确的定义和可计算的表达式。
3. 确定状态转移方程:根据子问题之间的关系,建立状态之间的转移方程。
这个方程可以是简单的递推关系式、递归方程或其他形式的方程。
4. 解决问题:使用递推或其他方法,根据状态转移方程求解每个子问题,直到获得最终解。
三、动态规划的使用案例1. 背包问题背包问题是动态规划算法的经典案例之一。
假设有一个背包,它能容纳一定重量的物品,每个物品有对应的价值。
目的是在不超过背包总重量的前提下,选取最有价值的物品装入背包。
这个问题可以通过动态规划算法来求解。
具体步骤如下:(1)定义问题:在不超过背包容量的限制下,选取物品使得总价值最大化。
(2)定义状态:令dp[i][j]表示将前i个物品放入容量为j的背包中所能获得的最大价值。
(3)状态转移方程:dp[i][j] = max(dp[i-1][j-w[i]]+v[i], dp[i-1][j]),其中w[i]为第i个物品的重量,v[i]为第i个物品的价值。
(4)解决问题:根据状态转移方程依次计算每个子问题的解,并记录最优解,直到获得最终答案。
2. 最长公共子序列最长公共子序列(Longest Common Subsequence,简称LCS)是一种经典的动态规划问题,它用于确定两个字符串中最长的共同子序列。
数学建模动态规划
u5*(E2)F.
4
6
D2 2
F
3
1
D3
3
E2 u4 *(D 1)E1.
f4(D2)5 u4 *(D 2)E2.
f 3 ( C 2 ) m d 3 ( C 2 , D 1 i ) f 4 n ( D 1 ) d 3 ( { C , 2 , D 2 ) f 4 ( D 2 )}
m 4 i7 ,5 n 5 } { 1 . 0
一、基本概念
阶段:是指问题需要做出决策的步数。阶段总数常记为n,相 应的是n个阶段的决策问题。阶段的序号常记为k,称为阶段 变量,k=1,2, …,n. k即可以是顺序编号也可以是逆序编号, 常用顺序编号。 状态:各阶段开始时的客观条件,第k阶段的状态常用状态
变量 s k 表示,状态变量取值的集合成为状态集合,用 S k
4
A
5
2
B1 3
6
8 7
B2
7
C1
5
8
4
C2 5
3
C3 4
8
C4 4
D1
3
5 6
D2 2
1
D3
3
u5*(E1)F,
E1
4
3
E2
u5*(E2)F.
F
f 4 ( D 1 ) m d 4 ( D 1 , E 1 i ) f n 5 ( E 1 ) d 4 ( { D , 1 , E 2 ) f 5 ( E 2 )}
到过程终止时的最佳效益。记为
其中 opt 可根据具体情况取max 或min。 基本方程:此为逐段递推求和的依据,一般为:
式中opt 可根据题意取 max 或 min. 例如,案例1的基本方程为:
动态规划算法的常见实例

动态规划算法的常见实例动态规划算法是一种将复杂问题分解为简单子问题来解决的算法,它可被应用于多个领域中,如经济学、生物学、计算机科学等。
在本文中,我们将详细讨论动态规划算法的常见实例。
一、最长公共子序列问题最长公共子序列(LCS)问题是一个经典的计算机科学问题,它要求在两个字符串中找到最长的相同连续子序列。
例如,对于字符串“ABCD”和“ACDF”,最长公共子序列为“ACD”。
使用动态规划方法来解决LCS问题。
首先定义一个m行n列的二维矩阵,其中m和n分别表示两个字符串的长度。
然后,使用以下递推关系:1. 如果一个字符串的长度为0,LCS为0。
2. 如果两个字符不相同,则LCS为它们的前一个字符集合和它们的后一个字符集合的最大值。
3. 如果两个字符相同,则LCS为它们的前一个字符集合和它们的后一个字符集合所组成的子序列中的最大值加1。
最后,矩阵右下角的值就是LCS的长度。
二、背包问题背包问题(Knapsack problem)是一个经典的组合优化问题,被广泛应用于计算机科学和其他领域。
在一个决策者必须决定是否将某些物品放入背包中的场景中,背包问题就发挥了作用。
具体来说,我们要解决的问题是:对于一个固定容量的背包,有一些物品,它们的重量和价值都不同,如何在不超过背包容量的前提下,使所装载物品的总价值最大化。
一种解决方案是使用动态规划方法。
定义一个二维数组,其行表示物品,列表示背包大小。
然后,使用以下递推关系:1. 如果所考虑的物品重量大于背包容量,则不选此物品。
2. 否则,在选取该物品和不选该物品两种情况中选择最优解作为最终结果。
最后,矩阵中右下角的值就是最大的总价值。
三、矩阵链乘法矩阵链乘法是一种计算矩阵乘积的优化算法。
它使用动态规划算法来确定矩阵乘积的最小值。
对于一个长度为n的矩阵链,我们可以定义一个n×n 的矩阵M,其中第i行第j列的元素Mi,j表示第i个矩阵与第j个矩阵相乘的最小次数。
北交大交通运输学院《管理运筹学》知识点总结与例题讲解第7章 动态规划
两级决策问题,从城市④到 E 有两条路线,需加以比较,取其中最短的,即
f3 (4)
=
min
⎧d ⎩⎨d
(4, 7) + (4,8) +
f
4
(7)⎫ ⎬
f4 (8) ⎭
表 7-1
i月
1
2
3
4
yi (需求)
2
3
2
4
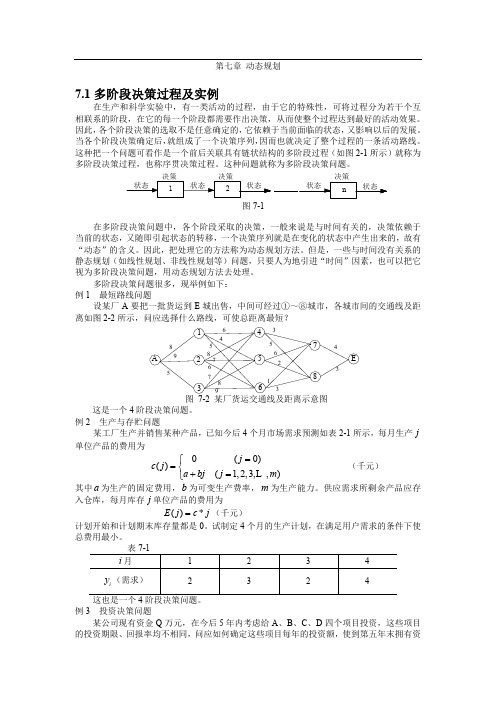
这也是一个 4 阶段决策问题。 例 3 投资决策问题
某公司现有资金 Q 万元,在今后 5 年内考虑给 A、B、C、D 四个项目投资,这些项目 的投资期限、回报率均不相同,问应如何确定这些项目每年的投资额,使到第五年末拥有资
金的本利总额最大。 这是一个 5 阶段决策问题。
c(
j)
=
⎧ ⎨⎩a
0 + bj
( j = 0) ( j = 1, 2,3,L , m)
(千元)
其中 a 为生产的固定费用, b 为可变生产费率, m 为生产能力。供应需求所剩余产品应存 入仓库,每月库存 j 单位产品的费用为
E( j) = c * j (千元)
计划开始和计划期末库存量都是 0。试制定 4 个月的生产计划,在满足用户需求的条件下使 总费用最小。
现在我们利用动态规划最优性原理,由最后一段路线开始,向最初阶段递推求解,逐
步求出各段各点到终点 E 的最短路线,最后求得 A 点到 E 点的最短路线。 上面我们已经规定了本例的阶段数、状态变量、决策变量,给出了转移方程、指标函数
等。再用 d (sk , uk ) 表示由状态 s k 点出发,采用决策 uk 到达下一阶段 sk+1 点时的两点间距离。 第一步从 k=4 开始,状态变量 s4 可取两种状态⑦、⑧,它们到 E 点的路长分别为 4,3。
运筹学 动态规划
max
3x1 4 x2 5 x3
max 3 x1 max 4 x2 5 x3 5 x2 6 x3 10 4 x1 10 0 x1 max 3 x1 f 2 10 4 x1
10 0 x1 4 4
,则有:
N 1 J x0 max L xk , u k u 0 ,u 1,,u N 1 k 0
* N N 1 max L x0 , u 0 L xk , u k u 0 ,u 1,,u N 1 k 1
(5)
(5)式表明,多阶段决策的最优策略只依赖于系统的初始状态 x 0 。
Байду номын сангаас
多阶段决策问题的最优性原理 多阶段决策问题的最优性原理可表述为: 如果 u * 0, u * 1,, u * N 1 是最优 策略序列,那么它的一部分 u * 1, u * 2,, u * N 1 也是一个最优策略序列。其反 证法的证明是无须赘述的[8,9]。 简单说, “最优策略的子策略必为最优子策略”
4 x2 5 x3
max 4 x2 max 5 x3 6 x3 2 5 x2 2 0 x2 max 4 x2 f 3 2 5 x2
2 0 x2 5 5
max 4 x2 max 5 x3 6 x3 105 x2 10 0 x2 max 4 x2 f 3 10 5 x2
k 1:
f1 10
4 x1 5 x2 6 x3 10
max
3 x1 4 x2 5 x3
Max z 3 x1 4 x2 5 x3 s.t. 3 x1 4 x2 5 x3 10 var iable positive, I