铰链四杆机构实现连杆轨迹的优化设计
铰链四杆机构的演化及应用教学设计

铰链四杆机构的演化及应用教学设计铰链四杆机构的演化及应用教学设计作为一名教学工作者,通常会被要求编写教学设计,教学设计是一个系统化规划教学系统的过程。
那么优秀的教学设计是什么样的呢?以下是小编精心整理的铰链四杆机构的演化及应用教学设计,希望对大家有所帮助。
《平面连杆机构》是中等职业学校《机械基础》中的重要内容,《铰链四杆机构的演化及应用》是该章中的重点和难点。
铰链四杆机构是平面连杆机构中最为典型的机构,它可以演化为“曲柄滑块机构、导杆机构”,多年教学发现,学生的基础不同,虽然在学习“铰链四杆机构的演化过程及应用”知识时表现出的困难程度有差别,但由于缺乏直观经验,学生在学习过程中均会存在一定的难度!笔者针对现在所任教的单招学生教学对象,设计了一堂课堂教学并进行了实施,本文对教学中的成功与不足等方面进行教学反思,以在今后教学中有所借鉴,提高教学效果!教情、学情分析:任教学生为“单招班”学生,他们的文化基础与学习态度较不是太好。
本节课是一堂复习课,在第一轮新课教学中主要采取传统教学方法,因学生对“机构的应用”缺少感性认识,理解时表现出一定的难度。
本节课运用“多媒体”教学手段(更加直观)、采用“课堂自主—研究学习”的教学方法,力图使学生对本节内容的理解更加深入,掌握更加透彻!“教学目的”的制定:1、掌握铰链四杆机构的演化过程及演化机构的结构组成及运动原理(认知目标);2、培养学生的观察能力、概括能力和自学能力,使他们能在实习或生产中解决相关的技术问题(能力目标);3、激发学生学习兴趣,增进师生互动、交流、达到“教学相长”的效果,进行热爱专业的思想教育,培养学生理论联系实际地学习(情感目标)。
教学方法及手段的选择:本节课采取课堂自主——研究的教学方法,课前让学生先进行自学,课堂上教师对总的教学目标进行细化,在讲解每个知识点时,采用“引导教学法”代替传统的“填鸭式”,先示出引导问题,让每个学生通过思考解决问题,层层递进,逐个解决问题,然后教师对学生的思维进行总结、训练和拓展;为弥补学生想像能力的欠缺、增强学生学习的直观性,对铰链四杆机构的演化过程可采用flash软件制作课件,对演化机构的应用(结构组成和运动原理)可从Internet上搜索多种教学素材(录像、实物等),提高教学效果!教学过程如下:一、思维引入:1.铰链四杆机构三种基本类型及判断方式?2.急回特性判定及其应用意义?3.曲柄摇杆机构死点产生条件、位置、克服方法、应用?4.列举实际生产生活中三种典型铰链四杆机构的应用实例?还存在哪些其他形式的四杆机构?二、思维启发演绎:(一)曲柄滑块机构演化通过演示,让学生观察,分析曲柄滑块机构是曲柄摇杆机构的演化形式。
平面铰链四杆机构的轨迹综合方法

平面铰链四杆机构的轨迹综合方法于红英;赵彦微;许栋铭【摘要】为提高平面铰链四杆机构轨迹综合的速度与精度,提出基于B样条曲线的综合方法.采用三次非均匀B样条曲线对连杆曲线进行拟合,将B样条曲线控制多边形各相邻两边的夹角作为连杆曲线的特征参数,将大量连杆曲线特征参数和对应的机构尺寸参数存入计算机以建立电子图谱库;当输入一定数目的有序离散数据点时,通过B样条曲线拟合得到期望曲线,提取期望曲线的特征参数;再利用神经网络将期望曲线的特征参数与电子图谱库中特征参数进行匹配,从而找到满足要求的机构,最终达到轨迹综合的目的.设计实例表明,该方法可快速实现四杆机构的轨迹综合,综合的精度高且所提取的特征参数与连杆曲线方位、缩放比例无关,减少了图谱库的数据冗余.【期刊名称】《哈尔滨工业大学学报》【年(卷),期】2015(047)001【总页数】8页(P40-47)【关键词】平面四杆机构;轨迹综合;连杆曲线;B样条曲线;特征参数【作者】于红英;赵彦微;许栋铭【作者单位】哈尔滨工业大学机电工程学院,150001哈尔滨;哈尔滨工业大学机电工程学院,150001哈尔滨;哈尔滨工业大学机电工程学院,150001哈尔滨【正文语种】中文【中图分类】TH112.1轨迹综合是平面连杆机构综合的3类基本问题之一,其主要目的是找到一个连杆机构,使其连杆平面上某一点能依次通过某一预先给定的轨迹.平面铰链四杆机构的轨迹综合一般有3种方法:图解法、解析法和图谱法.传统的图解法存在作图误差大,综合精度低等缺点,目前已经很少使用.解析法通常与各种优化方法结合运用,通过寻求最小目标函数来获得最优解[1-4],求解精度较高,但通常要受到初值选择以及寻优方法的影响而难于收敛.随着计算机技术的发展,计算机的海量存储能力和快速检索能力使得图谱法在轨迹综合中应用得越来越广泛.文献[5]通过建立已知机构的连杆转角曲线数据库,将要实现的封闭轨迹曲线也转化成连杆转角曲线,再与数据库中已有转角曲线比较,进而获得满足要求的机构.文献[6-7]中提出利用神经网络对平面连杆机构进行轨迹综合,通过运动学仿真建立了一个大样本库,然后对神经网络进行训练,可以通过训练好的神经网络找到综合问题的近似解.文献[8-9]中采用小波分析方法提取连杆轨迹的特征参数,构建连杆曲线图谱库进行轨迹综合.文献[10]中采用均匀B样条曲线来拟合连杆轨迹,提取B样条曲线控制顶点的坐标作为轨迹特征参数进行轨迹综合.文献[11]中将连杆曲线进行快速傅里叶变换,提取傅里叶级数作为描述连杆曲线的谐波特征参数,然后生成连杆曲线的电子图谱库,再从库中检索出满足要求的机构.上述各种方法中有些方法图谱库中存储数据较多,有些方法需要进行复杂后处理才能得到机构的实际尺寸和安装尺寸,导致不易用编程的方法快速找到合适的机构.本文以曲柄摇杆机构为例,采用三次非均匀B样条曲线来拟合平面连杆曲线,通过程序自动获取连杆曲线的型值点进行B样条曲线拟合,将B样条曲线的控制多边形各相邻两边间的夹角作为表征连杆曲线形状特征的参数,连同对应的机构尺寸参数建立连杆曲线的电子图谱库,再利用人工神经网络进行特征参数匹配,快速获得合适的平面铰链四杆机构,最终达到轨迹综合的目的.1 原始连杆曲线的生成如图1为曲柄摇杆机构ABCD,其中假设AB为曲柄,各杆实际杆长为l1、l2、l3、l4和l5,BP与连杆BC沿逆时针方向所成的角为δ(0°≤δ<360°).图1 曲柄摇杆机构的参数为研究方便,本文采用量纲一的相对杆长,即取曲柄r1=l1/l1=1,r2=l2/l1,r3=l3/l1,r4=l4/l1,r5=l5/l1.众所周知,只有r1、r2、r3及r4满足一定的长度关系时,才能构成以r1为曲柄的曲柄摇杆机构.现以r2=a(a≥1)为例说明如何确定r3、r4的取值范围.如图2所示,建立以相对杆长r2、r3、r4为坐标轴的三维直角坐标系Or2r3r4.过r2轴上的一点(a,0,0)作一平行于Or3r4的平面M,在平面M内过点(a,1,a)和点(a,a,1)作两条与r3轴正向成45°的射线EE'和FF',连接E、F两点.可以证明,线段EF与两射线EE'、FF'所围成的条形区域为r3、r4的取值范围.如图2中G点的坐标为(a,b,c),则代表r1=1,r2=a,r3=b,r4=c的曲柄摇杆机构尺寸型.当r2变化时,r3、r4在条形区域内的值应满足如下关系:图2 曲柄摇杆机构杆长尺寸分布本文按照一定的步长变化r2、r3、r4的值,编写程序生成了一定数量的曲柄摇杆机构的尺寸型.对于每一个尺寸型的曲柄摇杆机构,随连杆点P位置的不同(即r5和δ发生变化)产生的连杆曲线也不同.文献[12]在连杆平面上取了5行10列共50个点作为连杆点P的50个位置(见图3).图3 连杆点位置分布本文为丰富图谱库中连杆曲线,选取了11行21列共231个点作为P的231个位置,其坐标值可表示为根据曲柄摇杆机构的尺寸参数变化,利用计算机可批量完成连杆曲线的数据采集,即每一个尺寸型的曲柄摇杆机构的每一个连杆点在曲柄旋转一周时所形成的连杆曲线上N个点Qi(i=1,2,3,…,N)的坐标.通过试验,每条连杆曲线上取N=720时即可代表该曲线.2 连杆曲线的归一化为便于连杆曲线特征匹配,需要对连杆曲线进行归一化处理,使所有曲线的长、短和放置方式统一,无论待识别的曲线是正放、竖放、斜放,或大或小都能被识别出来.归一化具体方法如下.1)曲柄摇杆机构A0B0C0D0P0的起始位置和曲柄沿逆时针旋转时生成的连杆曲线如图4(a)所示,找出连杆曲线上相距最远的两个点G0、H0.2)将机构A0B0C0D0P0和连杆曲线平移,使偏左的点G0与坐标原点重合,平移变换公式如式(1)所示:式中T1为平移变换矩阵,i代表归一化过程中需要进行坐标变换的各点的标号.变换后机构和连杆曲线如图4(b)所示.图4 连杆曲线归一化过程3)如图4(b)所示,计算G01H01与x轴正向逆时针所成的角α0,将机构A01B01C01D01P01和连杆曲线顺时针旋转α0使G01H01与x轴重合,旋转变换公式如式(2)所示,变换后机构和连杆曲线如图4(c)所示.式中R1为旋转变换矩阵.4)如图4(c)所示,为使曲线凸起部分靠近y轴,找到当前曲线上距x轴最远的点Ⅰ02,Ⅰ02到x轴的垂足为点J02.计算G02J02和J02H02的长度,若,则将机构A02B02C02D02P02连同连杆曲线绕y轴做反射变换,再平移,使H02与坐标原点重合,变换公式如式(3)所示,变换结果如图4(d)所示;若,则保持原图,不进行变换,但交换G02、H02两点代号,即使H02点位于坐标原点.式中:S1为反射变换矩阵,T2为平移变换矩阵,且当xⅠ02>xH02-xⅠ02时,当xⅠ02≤x H02-xⅠ02时,5)如图4(d)所示,为保证曲线凸起部分在x轴的上方较大,需判断Ⅰ03点纵坐标的正负,然后进行式(4)的变换.若yⅠ03<0,则绕x轴做反射变换;若yⅠ03≥0,则不变化.变换结果如图4(e)所示.式中S2为反射变换矩阵,且当yⅠ03<0时,当yⅠ03≥0时,6)如图4(e)所示,将机构A04B04C04D04P04连同连杆曲线缩小倍,比例变换公式如式(5)所示,变换结果如图4(f)所示.式中S为比例变换矩阵.机构A0B0C0D0P0连同连杆曲线经过归一化处理,得到归一化后的机构A'0B'0C'0D'0P'0和归一化后的连杆曲线以及在归一化过程中相关的6个归一化参数:xG0、yG0、α0、xⅠ02、yⅠ03、k0.归一化变换矩阵是以上6个变换矩阵的乘积,即3 连杆曲线型值点的选择在使用B样条曲线对连杆曲线进行拟合时,连杆曲线上型值点的选择对曲线的特征参数提取及其最终的拟合精度具有重大影响.由于本文利用神经网络进行曲线特征参数的匹配,而神经网络的输入特征参数的数目必须是固定的,连杆曲线又形态各异,初始型值点数目可能并不相等,因此必须设计一套型值点自动选择算法,从连杆曲线的720个点中找到m个能够描述曲线特征的点qi(i=0,1,…,m-1).具体过程如下:1)通过数值构造的方式计算出连杆曲线上各点的一阶导数、二阶导数、曲率,选取轨迹上的极值点、拐点以及曲率极值点作为初始型值点,如图5(a)中“+”所示.2)删去步骤1)中较为密集的型值点,遵循删去曲率较小点的原则,剩余的型值点如图5(b)中“o”所示.3)步骤2)中剩余型值点数为s,设最终有m+t个特征参数作为神经网络的输入,其中t为连杆曲线精确拟合时再次插入的型值点数.为了保证神经网络输入特征参数数目的一致性,应使初始型值点数由s变到m.若s>m,则将另外的s-m个型值点依次插入到两个距离最远的型值点中;若s<m,则在型值点密集处删去m-s 个点.经过反复试验,m=12时在型值点数目较小的情况下拟合效果较好,如图5(c)中“◁”所示.4)对初始型值点进行调整,步骤3)中获得的初始型值点并不能完全满足拟合精度的要求.因此必须要对初始型值点进行调整.已知连杆曲线的N个点Qi(i=1,2,3,…,N),结合下文中的B样条曲线拟合方法,由m个初始型值点得到初始拟合曲线上的N个点Wi(i=1,2,3,…,N).为了便于度量拟合质量,定义最大拟合误差esmax=max(‖Qi-Wi‖)(i=1,2,3,…,N)、平均拟合误差,其中‖Qi-Wi‖表示点Qi到点Wi的距离.最大拟合误差反应了拟合曲线和连杆曲线最大分离程度,而平均拟合误差则反应了整体的拟合效果.规定esmax<0.010和es<0.008时满足初始拟合精度要求.分别检查esmax和es,若满足要求则可以不再调整型值点,若达不到要求,则找到连杆曲线上出现最大拟合误差点的曲线段的两个型值点,按照一定步长调整左右型值点位置,重新拟合曲线.重复以上步骤,保证型值点数目不变情况下调整型值点的位置,使拟合误差满足预期的精度要求,得到m个型值点qi(i=0,1,…m-1).最终得到的型值点如图5(d)中“*”所示.图5 初始型值点选择的过程4 曲线特征提取与图谱库建立给定连杆轨迹曲线(通常都是封闭的曲线)上的一组首尾重合的数据点,可构造出一条通过该组数据点且满足误差要求的Ck-1连续(具有k-1阶参数连续性)的k次封闭的B样条插值曲线[13-15].本文采用具有二阶参数连续性的三次非均匀B样条闭合的插值曲线对连杆曲线上的数据点进行拟合,将提取的型值点qi(i=0,1,…,m-1)作为已知的数据点,拟合的B样条曲线由n+1个控制顶点di(i=0,1,…,n)与节点矢量U=[u0,u1,…,un+k+1]来定义.首先,要确定节点矢量U.本文对于封闭的三次非均匀B样条曲线定义域[uk,un+1]=[u3,un+1]=[0,1]内的节点采用规范积累弦长参数化法来确定,该方法能够如实反映数据点按弦长的分布情况,定义域外节点确定为u0=un-2-1,u1=un-1-1,u2=un-1,un+2=1+u4,un+3=1+u5,un+4=1+u6.对于闭合的连杆曲线,B样条曲线的首末端点连接处同样要求具有C2连续性,令首末3个控制顶点依次相重合d0=dn-2,d1=dn-1,d2=dn,故未知控制顶点共有n-2个.对于插值曲线,反算过程中应使曲线的分段连接点依次与B样条曲线定义域内节点一一对应起来,则用于拟合m+1个数据点qi(i=0,1,…,m)的三次B样条插值曲线方程为将曲线定义域内的节点值代入式(6)应满足插值条件,即式(7)中含有m+1=n-1个方程,对于C2连续的三次非均匀B样条闭合曲线,由于首末数据点相重合q0=qm,则方程数目减少一个,剩m=n-2个.至此可由m=n-2个方程构成的方程组解出n-2个未知控制顶点.根据以上条件整理可得到以下矩阵方程:其中解矩阵方程即可求出未知的控制顶点,至此可得到全部控制顶点.由反算出的控制顶点通过德布尔算法[13]即可求得B样条曲线上的点.已知连杆曲线的m个初始型值点,首先利用上述方法得到初始的拟合曲线上的N个点Wi(i=1,2,3,…,N),然后对连杆曲线进行精确拟合.规定esmax<0.008和es<0.005时满足精确拟合精度要求.具体方法为:在连杆曲线上找到与拟合曲线的误差最大点处插入一个型值点,更新原有的型值点并重新进行曲线拟合,如此反复进行t次,经过多次的试验,取t=4已能满足曲线拟合的误差要求,不同形状原始曲线的拟合情况见图6,最大拟合误差、平均拟合误差如表1所示,可以看出拟合结果比较理想.图6 不同形状的曲线拟合表1 原始曲线的拟合误差曲线类型最大拟合误差平均拟合误差卵形 0.001 80.001 1 8字形 0.004 3 0.003 6水滴形 0.002 8 0.001 9类三角形 0.005 2 0.003 9为使神经网络输入特征参数的数目尽可能少,本文选择将控制顶点顺序连接成的控制多边形各相邻两边间的夹角θi(i=1,2,…,m+t)作为连杆曲线的特征参数.至此,连杆轨迹曲线的特征参数提取完成.将大量的连杆曲线的特征参数θi(i=1,2,…,m+t)和对应机构的6个尺寸参数r1、r2、r3、r4、r5、δ 存储,形成连杆曲线的电子图谱库.5 寻找满足给定轨迹要求的机构本文选用广义回归神经网络,利用已建立的电子图谱库中数据作为神经网络训练样本,即m+t=16个控制多边形各相邻两边间夹角θi(i=1,2,…,m+t)作为输入,对应6个机构尺寸参数r1、r2、r3、r4、r5、δ作为输出,对神经网络进行训练并保存.给定f个有序离散点(离散点数目f不受限制,可在4≤f≤N范围内任意给定),应用本文所述方法进行轨迹综合,寻找满足要求机构的步骤如下:1)将给定的f个离散点进行B样条曲线拟合,得到一条封闭的期望曲线.2)利用与图谱库中连杆曲线相同的处理方法,对期望曲线进行归一化处理,记录此过程中期望曲线的6个归一化参数:xG1、yG1、α1、xⅠ12、yⅠ13、k1,并对归一化后期望曲线进行型值点的选择以及特征参数的提取.3)将期望曲线特征参数θ1,i(i=1,2,…,m+t)输入到已训练好并保存的神经网络中,输出与期望曲线对应的量纲一的机构尺寸参数(r2,1、r2,2、r2,3、r2,4、r2,5、δ2),对应的机构为A2B2C2D2P2.4)由于神经网络具有自学习能力,输出的满足给定轨迹要求的机构尺寸参数可能并不对应图谱库中任何一组数据.因此,需要利用与图谱库中连杆曲线相同的处理方法,将输出机构A2B2C2D2P2及其描绘的连杆曲线也进行一次归一化处理,得到归一化后机构A'2B'2C'2D'2P'2.5)将归一化后的期望曲线连同步骤4)中的机构A'2B'2C'2D'2P'2,按照步骤2)中记录的6个归一化参数进行反归一化,得到满足要求的实际机构A1B1C1D1P1及其实际参数(l1,1、l1,2、l1、3、l1,4、l1,5、δ1).6)计算期望曲线与实际机构描绘的连杆曲线的综合误差,包括误差平均值es和误差最大值esmax.并计算误差与期望曲线上最远两点间距离k1的比值,即Ks=es/k1和Ksmax=esmax/k1,将Ks、Ksmax作为度量在有量纲情况下轨迹综合的精度参数.反归一化过程与归一化过程相反,对归一化后的机构和期望曲线进行反归一化的具体方法如下:a)将归一化后的机构A'2B'2C'2D'2P'2和期望曲线放大k1倍,比例变换公式如式(8)所示,i代表反归一化过程中需要进行坐标变换的各点的标号.式中S1为比例变换矩阵.b)判断yⅠ13的正负性,若yⅠ13<0,即期望曲线在归一化时绕x轴进行了反射变换,则要对当前图形做反射变换,反射变换公式如式(9)所示;若yⅠ13≥0,则不变化.式中S'1为反射变换矩阵,且当yⅠ13<0时,当yⅠ13≥0时,c)判断xⅠ12和k1-xⅠ12的大小,若xⅠ12>k1-xⅠ12,即期望曲线归一化时先绕y轴进行了反射和平移变换,则将当前图形绕y轴先做反射变换再平移,变换公式如式(10)所示;若xⅠ12≤k1-xⅠ12,则不变化.式中:S'2为反射变换矩阵,T'1为平移变换矩阵.且当xⅠ12>k1-xⅠ12时,d)将当前图形逆时针旋转α1角,旋转变换公式如式(11)所示:式中R'1为旋转变换矩阵.e)将当前图形平移,平移变换公式如式为式中T'2为平移变换矩阵,得到实际机构A1B1C1D1P1.反归一化变换矩阵是以上6个变换矩阵的乘积,即6 算法实现与示例下面给出计算实例,给定16个离散点的坐标值(见表2)进行轨迹综合,寻找近似通过这些离散点的曲柄摇杆机构.表2 给定的离散点点 p1~p8/mm 点 p9~p16/mm 1(0,0) 9 (51.96,30.00)2 (4.43,-4.60) 10 (45.60,36.19)3 (10.50,-6.41) 11 (35.91,39.41)4 (17.55,-5.26) 12 (25.13,38.91)5 (26.32,-1.08) 13 (14.72,34.92)6 (42.98,9.62)14 (5.76,27.78)7 (50.43,16.18) 15 (-0.16,18.71)8 (53.53,22.95) 16 (-2.26,8.86)应用本文所述的方法,首先,对给定的离散点通过B样条曲线拟合得到期望曲线,如图7(a).然后,对期望曲线经过归一化处理,得到归一化后的期望曲线如图7(b),以及6个归一化参数(见表3).图7 综合实例表3 期望曲线的归一化参数xG1/mm yG1/mm xⅠ12/mm yⅠ13/mm k1/mm α1/(°)0 0 0.498 0.380 60.000 30.218然后,进行型值点选择和特征参数提取,获取的型值点和控制多边形如图7(c)和图7(d)所示,得到期望曲线的特征参数θ1,i(i=1,2,…,16)(见表4).表4 期望曲线的特征参数点θ1,i~θ1,8/(°) 点θ1,9~θ1,16/(°)1 161.928 9 218.349 2 193.634 10 204.443 3 210.134 11 199.690 4 211.387 12196.702 5 194.222 13 199.226 6 182.638 14 207.049 7 186.739 15 201.1138 244.503 16 192.099将特征参数输入到已保存的神经网络中,输出与期望曲线对应的机构尺寸参数r2,1=1.000,r2,2=3.037,r2,3=3.461,r2,3=2.500,r2,5=1.108,δ2=57.009°,对应的机构为A2B2C2D2P2.将机构A2B2C2D2P2及其描绘的连杆曲线进行一次归一化,得到归一化后的机构A'2B'2C'2D'2P'2,其各点的坐标为A'2(0.278,-0.275),B'2(0.374,-0.641),C'2(1.470,-0.290),D'2(0.517,-1.191),P'2(0.484,-0.236),如图7(e)所示.最后,将机构A'2B'2C'2D'2P'2和归一化后的期望曲线,按照期望曲线的6个归一化参数xG1、yG1、α1、xⅠ12、yⅠ13和k1进行反归一化,得到的轨迹综合结果如图7(f)所示.实际机构A1B1C1D1P1尺寸参数l1,1=22.729 mm,l1,2=69.036 mm,l1,3=78.671 mm,l1,4=56.824mm,l1,5=25.188 mm,δ1=57.009°,其各点的坐标为A1(22.723,-5.826),B1(38.742,-21.950),C1(84.949,29.342),D1(62.771,-46.138),P1(32.230,2.382).综合得到的机构连杆曲线与期望曲线的误差和综合精度参数分别为:误差平均值es=0.657 mm,误差最大值esmax=1.084 mm,Ks=1.10%,Ksmax=1.81%,能够满足轨迹综合的精度要求.为进一步提高轨迹综合的精度可以通过增加轨迹图谱的数量、提高特征参数的数目等方式得到,在此不再详述.在主频为2.54 GHz、奔腾处理器及内存为2 GB的计算机上利用本文所述方法综合10条期望轨迹,只需要1.35 s就能给出与期望轨迹相对应的实际的曲柄摇杆机构,可见本方法具有非常快的综合速度.7 结论1)给出了基于三次非均匀B样条曲线理论的连杆曲线特征提取方法,利用B样条曲线控制多边形各相邻两边间的夹角作为连杆曲线的特征参数建立电子图谱库,减少了人工神经网络输入数据的数目.2)通过连杆曲线归一化方法,使重点集中在轨迹曲线的形状上,忽略曲线的具体姿态,消除了由于坐标轴的选择对轨迹综合的影响,大大减少了电子图谱库中数据的冗余量.3)通过程序自动获取连杆曲线的型值点,避免了对大量形状各异的连杆曲线的分类处理,大大简化了轨迹综合的过程.4)本方法并不限制给定有序离散点的数目,将离散点拟合的期望曲线的特征参数输入神经网络进行特征匹配,试验表明了该方法的有效性.5)本文所提方法也适用于其他类型的平面四杆机构的轨迹综合,如双曲柄机构、双摇杆机构和曲柄滑块机构.参考文献[1]CHANEKAR P V,GHOSAL A.Optimal synthesis of adjustable planar four-bar crank-rocker type mechanisms for approximate multi-path generation[J].Mechanism and Machine Theory,2013,69:263-277. [2]TARI H,SU H.A complex solution framework for the kinetostatic synthesis of a compliant four-bar mechanism[J].Mechanism and Machine Theory,2011,46(8):1137-1152.[3]MATEKAR S B,GOGATE G R.Optimum synthesis of path generating four-bar mechanisms using differential evolution and a modified error function[J].Mechanism and Machine Theory,2012,52:158-179.[4]CABRERA J A,ORTIZ A,NADAL F,et al.An evolutionary algorithm for path synthesis of mechanisms[J].Mechanism and Machine Theory,2011,46(2):127-141.[5]HONGYING Y,DEWEI T,ZHIXING W.Study on a new computer path synthesis method of a four-bar linkage[J].Mechanism and machine theory,2007,42(4):383-392.[6]VASILIU A,YANNOU B.Dimensional synthesis of planar mechanisms using neural networks:application to path generator linkages[J].Mechanism and Machine Theory,2001,36(2):299-310.[7]ULLAH I,KOTA S.Optimal synthesis of mechanisms for path generation using Fourier descriptors and global search methods[J].Journal of Mechanical Design,1997,119(4):504-510.[8]王成志,纪跃波.小波分析在平面四杆机构轨迹综合中的应用研究[J].机械工程学报,2004,40(8):34-39.[9]GALÁN-MARÍN G,ALONSO F J,DEL-CASTILLO J M.Shape optimization for path synthesis of crank-rocker mechanisms using a wavelet-based neural network[J].Mechanism and Machine Theory,2009,44(6):1132-1143.[10]张新歌.基于神经网络的铰链四杆机构复演轨迹设计软件的开发[D].苏州:苏州大学,2008.[11]褚金奎,孙建伟.基于傅里叶级数理论的连杆机构轨迹综合方法[J].机械工程学报,2010,46(13):31-41.[12]郎内斯J A,纳耳桑G L.四连杆机构分析图谱[M].李学英,译.北京:机械工业出版社,1966.[13]PIEGL L A,TILLER W.The NURBS book[M].New York:Springer,1997.[14]PIEGL L A,TILLER W.Surface approximation to scanned data [J].The visual computer,2000,16(7):386-395.[15]PIEGL L A,TILLER W.Biarc approximation of NURBS curves [J].Computer-Aided Design,2002,34(11):807-814.。
契贝谢夫四连杆机构的优化设计与应用
契贝谢夫四连杆机构的优化设计与应用
契贝谢夫四连杆机构是一种常用的机构,其由四根连杆和一个滑块组成。
契贝谢夫四连杆机构的优化设计和应用可以涉及以下方面:
1. 运动学分析和优化设计:可以通过对契贝谢夫四连杆机构的运动学特性进行分析和优化设计,以提高机构的性能。
通过优化连杆的长度和角度,可以实现所需的运动轨迹和位移,并最小化驱动力和摩擦损失。
2. 动力学分析和优化设计:可以通过对契贝谢夫四连杆机构的动力学特性进行分析和优化设计,以实现所需的力学性能。
通过优化连杆的惯量和刚度,可以提高机构的响应速度和精度,并最大限度地减小振动和动态载荷。
3. 结构强度分析和优化设计:可以通过对契贝谢夫四连杆机构的结构强度进行分析和优化设计,以确保机构在工作过程中的安全和可靠性。
通过优化连杆的剖面和材料,可以提高机构的承载能力和抗疲劳性,以应对不同工况和环境的要求。
4. 仿真和测试分析:可以通过使用计算机辅助设计和仿真软件,对契贝谢夫四连杆机构进行仿真分析,并验证优化设计的有效性。
同时,可以进行实际测试和试验,以验证优化设计参数和模型的准确性和可行性。
契贝谢夫四连杆机构在工程上有广泛的应用,例如在机械工程中可以应用于机器人、汽车发动机、传输机器和减速器等领域。
在机械设计和制造过程中,优化设计和应用契贝谢夫四连杆机构可以提高机械系统的性能、效率和可靠性。
此外,契贝谢夫四连杆机构也可以应用于模拟和教学实验,用于解决实际问题和培养学生的设计和创新能力。
平面连杆机构优化设计及运动仿真

{ = 一 ( 卢 一 ∞
: +一
芏
:
一 咖 5
‘ 一 ‘ 。 。 妒 ( 13 )
.
将 已 知 数 据 代 入 优 化 设 计 的数 学 模 型 表 示为 :
r —— —— — — —— —— —— 一
2 ‘ √ + 等 一 2 ‘ c 0 s 妒
m i n f ( x ) = 、 / ∑ 【 一 m ) + ( 一 ) ]
:
其中 = 0 +r p f ; 0 为曲柄 1 的起
( 2 .1 )
始角,c p f 为已 知量。
1 . 3确定约 束条件 1 . 3 . 1曲柄摇杆机构存在条件约束 为
岛( x ) = 3 0 P — y ≤ 0 ( 22 )
.
g 1 ( ) :/ 1 + , 2 一 一『 4 0 g : ( ) =f l + f ] 一f 2 一f 4 0
g 3 ( ) =f l +7 4 一f 3 — 1 2 0
g 4 ( ) =一 ‘≤0
应 用技 术
平面连杆机构优化设计及运动仿真
邹 学敏 蒋 晓 峰
湖南省特 种设 备检 验检 测研 究院永州分院 湖南 永州 4 2 5 0 0 0
摘要: 以四杆机构为例 ,根据其设计要求和特点 , 建 立 了四杆机构 的优化设计数 学模型 ,在满足诸多影响 因素 的条件下 ,用计算机软件进行优化设 计 以获得 一个在各 方面均 较令人 满意的机构 设计方案;并对优化设计 的曲柄摇杆机构进行运 动仿真分 析。结果表 明: 采用优化设 计方法可以缩短设 计周期 、 提高设计质 量和设 计精度 ; 运动仿真起 到很好的反馈作用和验证作用。同时该方 法也为 多杆机构和其他机构 的优 化和仿真设计提供 了 借 鉴。 关键 词 :平 面连杆机构 M A T L A B 优化设计 运 动仿真
四杆机构实验报告

四杆机构实验报告四杆机构实验报告引言四杆机构是一种常见的机械结构,由四个连杆组成,通过铰链相连。
在工程学中,四杆机构被广泛应用于各种机械设备中,如发动机、机械手臂和运动机构等。
本实验旨在通过对四杆机构的研究和实验,深入了解其运动特性和应用。
一、实验目的本实验的主要目的是通过实验观察和测量四杆机构的运动规律,深入了解四杆机构的结构和工作原理。
具体目标包括:1. 理解四杆机构的基本构造和运动方式;2. 掌握四杆机构的运动规律和特性;3. 分析四杆机构的应用领域和优缺点。
二、实验装置和方法1. 实验装置:本实验使用由四个连杆和铰链组成的四杆机构模型,以及相应的测量仪器和工具。
2. 实验方法:a. 调整四个连杆的长度和角度,使其满足四杆机构的运动要求;b. 使用测量仪器测量和记录四个连杆的长度和角度的变化;c. 分析测量数据,绘制运动曲线和角度变化图表;d. 观察和记录四杆机构的运动规律和特点。
三、实验过程和结果1. 实验过程a. 调整四杆机构的连杆长度和角度,使其形成一个闭合的四边形;b. 使用测量工具测量和记录四个连杆的长度和角度的变化;c. 通过改变连杆长度和角度,观察和记录四杆机构的运动规律;d. 根据测量数据和观察结果,分析四杆机构的运动特性和应用。
2. 实验结果a. 通过测量仪器记录的数据,绘制了四个连杆的长度和角度的变化图表;b. 观察和记录了四杆机构的运动规律,如连杆的旋转和平移运动;c. 分析了四杆机构的运动特性和应用,如转动和传动功能。
四、实验分析和讨论1. 实验分析通过实验观察和测量,我们可以清楚地看到四杆机构的运动规律和特性。
连杆的长度和角度的变化直接影响着四杆机构的运动方式和速度。
通过改变连杆的长度和角度,我们可以实现不同的运动效果,如旋转、平移和传动等。
2. 实验讨论四杆机构具有广泛的应用领域和优点。
它可以用于实现复杂的运动和动力传递,如发动机和机械手臂。
同时,四杆机构的结构简单,易于制造和维护。
近似直线运动四杆机构的最优化设计与轨迹模拟
21 0 2年 第 l ( 第 3 0期 ) 期 总 9
4 3
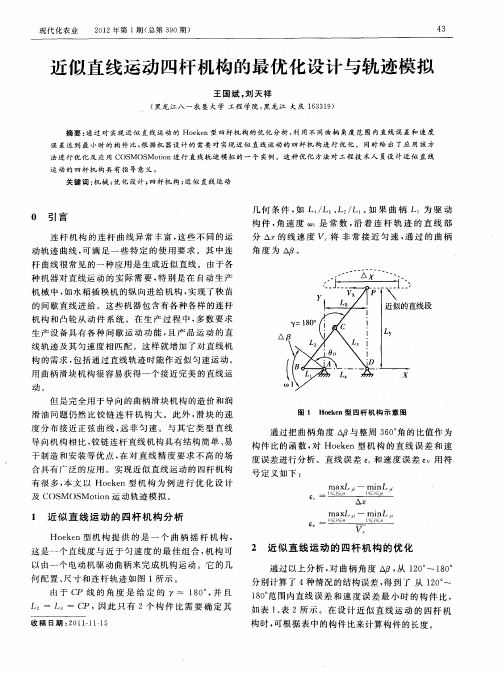
近似 直线运动 四杆 机构 的最优化设计 与轨迹模拟
王 国斌 。 天 祥 刘
( 黑龙 江八 一 农 垦 大 学 工 程 学 院 , 龙 江 大庆 1 3 1 ) 黑 6 3 9
摘 要 : 过 对 实现 近 似 直 线运 动 的 Ho k n型 四杆 机 构 的优 化 分 析 , 用 不 同 曲柄 角度 范 围 内直 线 误 差 和 速 度 通 ee 利
度 分布 接 近正 弦 曲线 , 非匀 速 。与其 它 类 型 直 线 远
图 1 Hok n型 四 杆 机 构 示 意 图 ee
通过 把 曲柄 角度 △ 与 整周 3 0角 的 比值作 为 6。 构 件 比的函 数 , Ho k n型 机构 的直 线 误 差 和速 对 ee 度误 差进 行分析 。直线误 差 £ 和 速 度 误 差 e 用 符
1 40 1O 6
1O 2 1O 1
10 O 9 0
33 .3 38 .9 44 .4 5O .O
18 . 85
3. 7 32 5. 8 87 9. 9 29
O. 2 75
1 .3l 9
l 47 |3 1 61 .3 1 7 .3 4
2 38 .2 2 25 .1 2 .O1 3 l 63 I8
的 问歇直线 进 给 。这些 机器包 含 有各种 各样 的连 杆 机 构 和凸轮 从 动 件 系统 。在 生产 过 程 中 , 数 要 求 多 生 产设 备具 有 各种 问 歇 运 动 功 能 , 产 品运 动 的 直 且 线 轨迹 及其 匀速 度相 匹 配 。这 样就 增加 了对 直线 机
2 O0 .6 2 .93 2 3. 2 23 3 56 .4
铰链四杆机构连杆曲线的图谱

机构。但这些方法与工程设计的要求还有一段距 离,常常花费很多时间却只得到一个近似的设计 方案。因此, 建立一种简单、 方便、 实用 的 设 计 方 法,绘制便于为广大设计人员在设计中查阅的图 谱, 已成为当务之急。利用计算机绘图及其动态显 示功能, 这就使轨迹复演变得比较容易了。采用这 种手段不仅可以观察连杆曲线的轮廓形状,而且 可以观察连杆曲线的形成过程和机构各构件的相 对运动情况。
作者简介:李文方( , 男, 福建莆田涵江区人, 副教授, 硕士。 ’‘ab*P )
:1
莆
田
学
院
学
报
!""! 年 # 月
线图谱库。为了使该图谱库具有实用性, 按连杆曲 线图形形状分为椭圆形、 卵形、 云形、 新月形、 面包 形、 棒锤形、 镰刀形、 翼形、 水滴形、 三角形和 C 字 形等 99 种形状,再对每一种形状精选出 !5 种机 构尺寸方案。这样就形成了一个具有 99D!5&!!5 条连杆曲线的小型图谱库。 该图谱库有 4 个主要 功能: 存储 !!" 条连 /9E 对连杆曲线图形进行分类, 杆曲线的杆长相对尺度, 不同的杆尺寸, 可显示出 相应不同的连杆点图形; /!0 可观察到同一机构上 不同区位的连杆点所产生的连杆曲线形状是不同
)$( + 可用于解决工程上的有关杆机构设计的
问题。
参考文献:
机械 ,’-% 李 学 荣 .+ 四 连 杆 机 构 综 合 概 述 ) 第 一 册 /,0-.+ 北 京 :
"""图 #""""缝纫机挑线机构
工业出版社, ’1123+1$4’5’.
,*-+ 刘 葆 旗 ,黄 荣 .++ 四 杆 直 线 导 向 机 构 的 设 计 与 轨 迹 图 谱
铰链四杆机构的基本特性课件

利用智能控制技术,如模糊控制、神经网络和遗传算法,实现对机构的高精度 控制和自适应调节。
自动化技术
采用自动化技术,如机器人和自动化生产线,实现机构的自动化装配、检测和 调试,提高生产效率和产品质量。
铰链四杆机构的基本 特性课件
目录
CONTENTS
• 铰链四杆机构的定义与组成 • 铰链四杆机构的基本特性 • 铰链四杆机构的运动分析 • 铰链四杆机构的优化设计 • 铰链四杆机构的应用 • 铰链四杆机构的发展趋势与展望
01 铰链四杆机构的定义与组 成
定义
01
铰链四杆机构是一种由四个杆件 通过铰链连接而成的机械机构, 通常用于实现各种运动轨迹和传 动功能。
03 铰链四杆机构的运动分析
平面四杆机构的运动分析
平面四杆机构是由四个杆件相 互铰接组成的,其运动特性主 要取决于各杆的长度和角度。
平面四杆机构有三种基本类型 :曲柄摇杆机构、双曲柄机构 和双摇杆机构。
平面四杆机构的运动分析可以 通过几何法和解析法进行,其 中解析法更为精确和可靠。
空间四杆机构的运动分析
求。
减小能耗
降低机构在运动过程中的能量 消耗,实现节能减排。
减小尺寸和重量
优化机构的结构设计,减小其 尺寸和重量,便于携带和运输
。
提高可靠性
增强机构的结构强度和耐磨性 ,提高其使用寿命和可靠性。
优化设计方法
数学建模
建立铰链四杆机构的数 学模型,包括几何模型 、运动学模型和动力学
模型等。
仿真分析
利用仿真软件对机构进 行运动学和动力学仿真 分析,以评估其性能。
印刷机械
在印刷机械中,铰链四杆机构用于 调节印刷滚筒的位置和角度,确保 印刷质量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
%铰链四杆机构实现连杆轨迹的优化设计% (调用目标函数lgjg_gjyh_mb 和非线性约束函数lgjg_gjyh_ys)%设计变量:x(1)-机架;x(2)-曲柄;x(3)-连杆;x(4)-摇杆;x(5)-连杆附杆;% x(6)-机架倾斜角beta;x(7)-连杆与附杆夹角 gamma;x(8)-曲柄相初始角thetaO; %设计变量初值 x0=[50;7;55;25;25;-12;15;50]; %设计变量边界 lb=[10;8;10;10;10;-20;5;5]; ub=[60;30;60;40;30;30;15;60]; % % % %hd=pi/180;delta_ n=acos((xo pt(3)A2+xo pt(4) ^2-(x0 pt(1)-xo pt(2))A2)/(2*x op t(3)*xo pt(4))); fprintf (' 机构最小传动角 delta_min = %3.4f ° \n',delta_n/hd);%调用多维约束优化函数(lgjg_gjyh_ys)计算最优点x*的性能约束函数值 [g,ceq]=lgjg_gjyh_ys(xo pt); disp ' fprintf (' 最小传动角约束函数值 g1* = %3.4f \n',g(1))fprintf (' 曲柄长度 <=机架长度 g2* = %3.4f \n',g(2)) fprintf (' 曲柄长度 <=连杆长度 g3* = %3.4f \n',g(3))fprintf (' 曲柄长度 <=摇杆长度 g4* = %3.4f \n',g(4))fprintf (' 曲柄+机架 <=摇杆+连杆 g5* = %3.4f \n' ,g(5)) fprintf (' 曲柄+连杆 <=摇杆+机架 g6* = %3.4f \n ',g(6)) fprintf (' 曲柄+摇杆 <=连杆+机架 g7* = %3.4f \n' ,g(7)) fprintf (' 机架长度<=60 g8* = %3.4f \n',g(8)) fprintf (' 曲柄长度>=8 g9* = %3.4f \n',g(9))fprintf (' 曲柄长度<=30 g10* = %3.4f \n',g(10)) fprintf (' 连杆长度<=60 g11* = %3.4f \n',g(11)) fprintf (' 摇杆长度<=40 g12* = %3.4f \n',g(12)) fprintf ('附杆长度>=10g13* = %3.4f \n',g(13))fprintf (' 机架长度 d = %3.4f mm \n',xo pt(1)) fprintf (' 曲柄长度 a = %3.4f mm \n',xo pt(2)) fprintf (' 连杆长度 b = %3.4f mm \n',xo pt(3)) fprintf (' 摇杆长度 c = %3.4f mm \n',xo pt(4)) fprintf (' 连杆附杆长度 h = %3.4f mm \n',xo pt(5)) fprintf (' 机架倾斜角 beta = %3.4f ° \n :X op t(6))fprintf (' 连杆与附杆夹角 gamma = %3.4f ° \n ',xo pt(7fprintf (' 曲柄初始位置角theta0 = %3.4f ° \n ',xo pt(8)) fprintf ('M 点轨迹坐标偏差f* = %3.4f\n ',fo pt)I线性不等式约束(g(2)〜g(20))中设计变量的系数矩阵 a 省略,定义为空矩阵“[]”线性不等式约束(g(2)〜g(20)中的常数项列阵b 省略,定义为空矩阵“[]” 没有等式约束,参数 Aeq 和beq 定义为空矩阵“[]” 调用非线性优化函数[xop t,fo pt]=fmi ncon( @lgjg_gjyh_mb,x0,[],[],[],[],lb,ub,@lgjg_gjyh_ys); dis p铰链四杆机构实现连杆轨迹的优化设计最优解最优点的约束函数值附杆长度<=30 g14* = %3.4f \n',g(14)) fprintf ('fprintf (' 机架倾斜角>=-20 °g15* = %3.4f \n',g(15)) fprintf ('机架倾斜角<=30 °g16* = %3.4f \n',g(16)) fprintf ('连杆附杆夹角>=0 °g17* = %3.4f \n',g(17)) fprintf ('连杆附杆夹角<=15 °g18* = %3.4f \n',g(18)) fprintf (' 曲柄初始角>=0 °g19* = %3.4f \n',g(19)) fprintf ('曲柄初始角<=15 °g20* = %3.4f \n',g(20)) 计算结果:Op timizati on term in ated: magn itude of direct ional derivative in search direct ion less tha n 2*op ti on s.Tol Fun and maximum con stra int violati on is less tha n op ti on s.TolC on.Active in equalities (to with in op ti on s.TolC on = 1e-006): lower2 ********in eqli n ineqnon li n9铰链四杆机构实现连杆轨迹的优化设计最优解upperan 机架长度 d = 51.7446 mm曲柄长度 a = 8.0000 mm连杆长度 b = 53.6230 mm摇杆长度 c = 25.4846 mm连杆附杆长度h = 22.6784 mm机架倾斜角beta = 11.4185 °连杆与附杆夹角gamma = 14.9999 °曲柄初始位置角theta0 = 50.0664 °M点轨迹坐标偏差f* = 1.9718机构最小传动角delta_min = 53.8751最优点的约束函数值最小传动角约束函数值g1* = -482.3881曲柄长度<=机架长度g2* = -43.7446曲柄长度<=连杆长度g3* = -45.6230曲柄长度<=摇杆长度g4* = -17.4846曲柄+机架<=摇杆+连杆g5* = -19.3631曲柄+连杆<=摇杆+机架g6* = -15.6062曲柄+摇杆<=连杆+机架g7* = -71.8830机架长度<=60 g8* = -8.2554曲柄长度>=8 g9* = 0.0000曲柄长度<=30 g10* = -22.0000连杆长度<=60 g11* = -6.3770摇杆长度<=40 g12* = -14.5154附杆长度>=10 g13* = -12.6784附杆长度<=30 g14* = -7.3216机架倾斜角>=-20 °g15* = -31.4185机架倾斜角<=30 °g16* = -18.5815连杆附杆夹角>=0 °g17* = -14.9999%铰链四杆机构实现连杆轨迹的优化设计 --目标函数文件---lgjg_gjyh_mb.mfun ctio n f=lgjg_gjyh_mb(x) %曲柄输入角增量Dtheta=[0,22,44,66,88,129,221,314]; %连杆上M 点给定的坐标 Sx=[26,23,20,17,13,10,20,30]; Sy=[16,17,17,16,15,11,6,12]; %目标函数 hd=pi/180;theta=x(8)+Dtheta;%曲柄输入角=初始角+角增量ep silo n=ata n(x(2).*si n((theta-x(6))*hd)/(x(1)-x(2).*cos((theta-x(6))*hd)));etaz=x(1)A2+x (2) ^2+x (3)^2-x (4) ^2-2*x(1)*x(2).*cos((theta-x(6))*hd); etam=2*x(3)*sqrt(x(1)A2+x (2)^2-2*x(1)*x(2).*cos((theta-x(6))*hd));eta=etaz./etam;p hi=x(6)+x(7)+eta-e psil on;Mx=x(2).*cos(theta*hd)+x (5) .*cos( phi*hd);My=x(2).*s in (theta*hd)+x (5).*si n(p hi*hd); f=sqrt(sum((Mx-Sx).A2+(My-Sy).A2)/8);%铰链四杆机构实现连杆轨迹的优化设计 fun ctio n [g,ceq]=lgjg_gjyh_ys(x)连杆附杆夹角<=15 曲柄初始角>=0 ° 曲柄初始角<=15 °g18* = -0.0001 g19* = -50.0664 g20* = -9.9336%凑整解的计算xz=[52,8,54,25,23,11.5,15,50]; fz=lgjg_gjyh_mb(xz);gz=lgjg_gjyh_ys(xz); delta_z=acos((xz(3)A2+xz(4)A2-(xz(1)-xz(2))A2)/(2*xz (3) *xz (4))); dis pI anfprintf (' fprintf (' if gz<=0dis p 'else铰链四杆机构实现连杆轨迹的优化设计凑整解M 点轨迹坐标偏差机构最小传动角f* = %3.4f delta_z= %3.4f ° 未a***、\n',fz)\n ',delta_z/hd)&&&&&&&&凑整解在可行域内 &&&&&&&&'dis p 'end&&&&&&&& 凑整解在可行域外&&&&&&&&'********铰链四杆机构实现连杆轨迹的优化设计凑整解M 点轨迹坐标偏差f* = 1.9989机构最小传动角 delta_z = 53.5270 &&&&&&&& 凑整解在可行域内********&&&&&&&&%连杆上M 点实际x 坐标 %连杆上M 点实际y 坐标 % M 点坐标偏差均方根值--约束函数文件---lgjg_gjyh_ys.m%机构最小传动角(40度)约束g(1)=x (3)A2+x(4)A2-(x(1)-x(2))A2-2*x (3) *x(4)*cos(40* pi/180); %曲柄存在条件约束 g(2)=-x(1)+x(2); g(3)=-x(3)+x(2); g(4)=-x(4)+x(2);g(5)=x(1)+x(2)-x(3)-x(4); % 曲柄 + 机架<= 摇杆 +连杆 g(6)=-x(1)+x(2)+x(3)-x(4); % 曲柄 + 连杆 <= 摇杆 +机架 g(7)=-x(1)+x(2)-x(3)+x(4); %曲柄+ 摇杆 <=连杆 +机架%边界约束g(8)=x(1)-60;% 机 架 <=60g(9)=8-x(2);g(10)=x(2)-30;%8 <=曲柄<=30g(11)=x(3)-60;%连; 杆 <=60g(12)=x(4)-40;%摇; 杆 <=40g(13)=10-x(5);g(14)=x(5)-30; g(15)=-x(6)-20;g(16)=x(6)-30; g(17)=-x(7);g(18)=x(7)-15; g(19)=-x(8);g(20)=x(8)-60; ceq珂];% 10 <=连杆附杆 <=30 % -20度 <=机架倾斜角% 0度 <=连杆附杆夹角 % 0度 <=曲柄初始角曲柄长度 曲柄长度 曲柄长度 <=机架长度 <=连杆长度 <摇杆长度<=30 度 <=15 度 <=60 度。