usb摄像头驱动移植第一步总结
机顶盒加装摄像头方法

机顶盒加装摄像头方法机顶盒加装摄像头的方法有很多种,根据不同型号和品牌的机顶盒,选择最适合的方法来加装摄像头。
下面将分别介绍两种常见的方法。
一、通过USB接口连接摄像头1. 准备工作:首先需要准备一台带有USB接口的机顶盒和一个兼容的摄像头。
确保机顶盒的固件版本支持USB摄像头。
2. 连接:将摄像头的USB接口连接到机顶盒的USB接口上。
根据机顶盒的界面设置,选择对应的输入源为USB摄像头。
3. 安装驱动程序:有些机顶盒需要安装驱动程序才能正常使用摄像头。
连接好摄像头后,根据机顶盒的提示进行驱动程序的安装。
4. 调试:安装好摄像头和驱动程序后,进入机顶盒的设置界面,找到摄像头设置选项。
按照提示进行摄像头的校准和调试。
一般来说,可以调整摄像头的亮度、对比度、饱和度等参数。
5. 使用:完成以上步骤后,摄像头就可以正常工作了。
在机顶盒的界面上,可以看到摄像头的画面。
可以通过遥控器或者键盘来进行摄像头的控制,如调整焦距、切换拍摄模式等。
二、通过HDMI接口连接摄像头1. 准备工作:同样需要准备一台拥有HDMI接口的机顶盒和一个兼容的摄像头。
确保机顶盒的固件版本支持HDMI摄像头。
2. 连接:将摄像头的HDMI接口连接到机顶盒的HDMI接口上。
根据机顶盒的界面设置,选择对应的输入源为HDMI摄像头。
3. 安装驱动程序:有些机顶盒需要安装驱动程序才能正常使用摄像头。
连接好摄像头后,根据机顶盒的提示进行驱动程序的安装。
4. 调试:安装好摄像头和驱动程序后,进入机顶盒的设置界面,找到摄像头设置选项。
按照提示进行摄像头的校准和调试。
一般来说,可以调整摄像头的亮度、对比度、饱和度等参数。
5. 使用:完成以上步骤后,摄像头就可以正常工作了。
在机顶盒的界面上,可以看到摄像头的画面。
可以通过遥控器或者键盘来进行摄像头的控制,如调整焦距、切换拍摄模式等。
无论是通过USB接口还是HDMI接口连接摄像头,需要注意以下几点:1. 确保机顶盒的固件版本支持连接摄像头,并且有相应的设置选项。
实验十五 USB 摄像头驱动和应用实验

2.3 视频捕获函数与其捕获线程
int CCameraCode::StartStreaming (HDC hdc, RECT *prect, WORD wFormat, WORD wFrame, DWORD dwInterval) { PTHREADSTRUCT pThd = (PTHREADSTRUCT)LocalAlloc (LPTR, sizeof (THREADSTRUCT)); if (!pThd) return ERROR_NOT_ENOUGH_MEMORY; // Load parameter passing struct pThd->wFormat = wFormat; pThd->wFrame = wFrame; pThd->rect = *prect; pThd->dwInterval = dwInterval; pThd->hdc = hdc; pThd->pCamercode =this;
2
USB 设备的识别过程,包括 USB 总线枚举过程、设备类配置过程等。而 USB 的通信过 程,则按层次依次分为信号层、协议层和数据传输层进行。下面分别对上述过程进行描述。 数据传输层 接 协议层 USB 主机 信号层 USB 总线接口 端 点 口
逻辑通信
物理通信
图 2 USB 通信的逻辑结构
a) USB 设备的识别过程: 总线枚举过程: 当一个新的 USB 设备接入集线器(HUB)的某个端口上,集线器就会通过“状态改变管 道”向 USB 主机(USB Host)报告新的设备的接入。主机询问集线器确认新设备的接入后, 等待一段时间后,向端口发出复位命令并使能该端口。 在端口复位完毕后,该端口就有效了,此时 USB 设备出于默认状态,地址为 0。接着主 机给设备分别一个唯一的地址,设备进入有地址状态。 主机从设备中读取所有配置描述符,并且根据读取的配置描述符为设备指定一个配置。 这样设备就可以得到所需要的电量和其他资源,设备已经准备就绪。 设备类配置: 总线枚举完毕后,从设备的角度讲,它已经可以正常工作了,但是主机尚未为该设备的 不同接口分配具体的客户端驱动程序。 因此此时主机端协议软件找到设备中每个接口所需要 的驱动程序,然后驱动程序从接口的选择设置中选出最合适的,为接口中端点创建管道。 如此完成所有接口的配置,设备的配置过程就彻底完成了。USB 设备就像非 USB 设备一 样传输数据了。 USB 通信原理 USB 的通信就是指 USB 设备与 USB 主机之间的通信。物理上,总线上的设备通过一条物 理连线和主机通信,所有的设备共享这个物理链路。逻辑上,主机给每个设备提供了一条逻 辑的连接,每个设备都有这样一条点对点的连接。 为了细化 USB 的通信机制,协议开发者采用了分层的概念。USB 通信逻辑上分成三层: 信号层、协议层和数据传输层。 信号层用来传输位信息流的信息,在这里传输的数据称为包(Packet) ;协议层用来实 现包字节流的信息,它们在信号层被编码成 NRZI 位信息传送出去,这里的包信息流称为事 务处理(Transaction) ;数据传输层用来实现在功能接口间传输有一定意义的信息, 这些信 息在协议层被打包为包格式,这里的信息流称为传输(Transfer) 。下面分析各个层次进行 数据传输I CCameraCode::ReadFrameThread (PVOID pArg) { int rc = 0; BOOL f; DWORD dwBytes; THREADSTRUCT Thd; FORMATPROPS fmtData; int nFrameCnt = 0; DWORD dwTick = 0; DWORD dwErr = 0; if (!pArg) return -1; // Copy over params Thd = *(PTHREADSTRUCT)pArg; CCameraCode *pCameracode=(CCameraCode*)Thd.pCamercode; LocalFree (pArg); rc = pCameracode->GetFormatInformation (Thd.wFormat, Thd.wFrame, &fmtData); if (rc) return rc; // Initialize the conversion library rc =pCameracode->pMjpe2bmp-> InitDisplayFrame (NULL); RECT rect; if ((Thd.rect.right == 0) && (Thd.rect.bottom == 0)) SetRect (&rect, Thd.rect.left, Thd.rect.top, Thd.rect.left + fmtData.dwWidth, Thd.rect.top + fmtData.dwHeight); else rect = Thd.rect; // Parameters needed to start a stream STARTVIDSTRUCT svStruct; dwBytes = 0; svStruct.cbSize = sizeof (STARTVIDSTRUCT); svStruct.wFormatIndex = Thd.wFormat; svStruct.wFrameIndex = Thd.wFrame; svStruct.dwInterval = Thd.dwInterval; svStruct.dwNumBuffs = NUMBUFFS; svStruct.dwPreBuffSize = PREBUFFSIZE; svStruct.dwPostBuffSize = 0; // Start the video stream f = DeviceIoControl ( pCameracode->hCam, IOCTL_CAMERA_DEVICE_STARTVIDEOSTREAM, (LPVOID)&svStruct, sizeof (STARTVIDSTRUCT), 0, 0, &dwBytes, NULL); if (f) { GETFRAMESTRUCT gfsIn;
USB光电头驱动安装说明
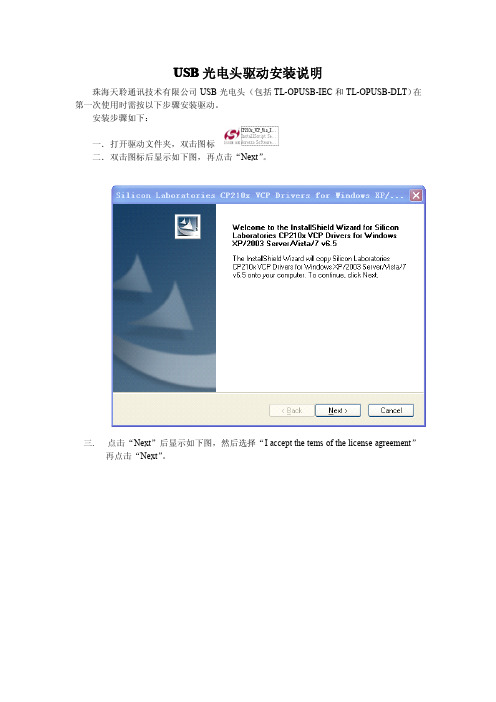
USB光电头驱动安装说明
珠海天聆通讯技术有限公司USB光电头(包括TL-OPUSB-IEC和TL-OPUSB-DLT)在第一次使用时需按以下步骤安装驱动。
安装步骤如下:
一.打开驱动文件夹,双击图标
二.双击图标后显示如下图,再点击“Next”。
三.点击“Next”后显示如下图,然后选择“I accept the tems of the license agreement”
再点击“Next”。
四.点击“Next”后显示如下图,然后点击“Browse”选择您安装的存储路径,选择好存储
路径后,点击"Next"。
五.点击“Next”后显示如下图,再点击“Install”.
六.点击“Install”后显示如下图,选择“Launch the CP210x VCP Driver Installer”然后点击“Finish”。
七.点击“Finish”后显示如下图,点击“Install”
八.点击“Install”后显示如下图,点击"是"选择重新启动计算机,重新启动计算机后驱动安装完成。
usb高清摄像头方案

USB高清摄像头方案简介USB高清摄像头方案是一种基于USB接口的摄像头解决方案,可以通过USB接口连接到计算机或其他设备,提供高清图像和视频捕捉功能。
USB摄像头方案广泛应用于视频会议、在线教育、安防监控、电子游戏等领域。
本文将介绍USB高清摄像头方案的基本原理、硬件配置和软件开发要点,以帮助读者了解和使用USB高清摄像头方案。
基本原理USB高清摄像头方案的基本原理是通过摄像头模块采集图像数据,然后将数据传输到计算机或其他设备。
以下是USB高清摄像头方案的基本工作流程:1.摄像头采集图像数据:摄像头模块使用光学元件和图像传感器来采集环境中的图像数据。
摄像头模块通常包括镜头、光圈、快门等组件,用于实现对图像的调节和控制。
2.图像压缩和编码:采集到的图像数据通常比较庞大,需要进行压缩和编码以减小数据量。
常用的图像压缩和编码算法包括JPEG、H.264等。
B传输:压缩和编码后的图像数据通过USB接口传输到计算机或其他设备。
USB接口提供了高速数据传输能力,可以满足高清摄像头方案的数据传输需求。
4.数据解码和处理:计算机或其他设备接收到图像数据后,需要进行解码和处理。
解码将压缩和编码后的数据转换回原始图像数据,然后可以进行后续的图像处理和应用开发。
硬件配置USB高清摄像头方案的硬件配置包括摄像头模块、驱动电路和USB接口电路。
摄像头模块摄像头模块是实现图像采集功能的关键组件。
摄像头模块的选型应根据实际需求考虑分辨率、像素大小、光圈、焦距、帧率等参数。
常用的摄像头模块包括CMOS和CCD摄像头模块,其中CMOS摄像头模块具有低功耗、低成本和高速度的优势,被广泛应用于USB高清摄像头方案中。
驱动电路驱动电路用于控制和驱动摄像头模块。
驱动电路通常包括信号放大电路、滤波电路、时钟电路、电源管理电路等。
驱动电路的设计需要考虑摄像头模块的接口和特性,以确保良好的图像质量和稳定性。
USB接口电路USB接口电路用于将图像数据传输到计算机或其他设备。
摄像头移植过程详解
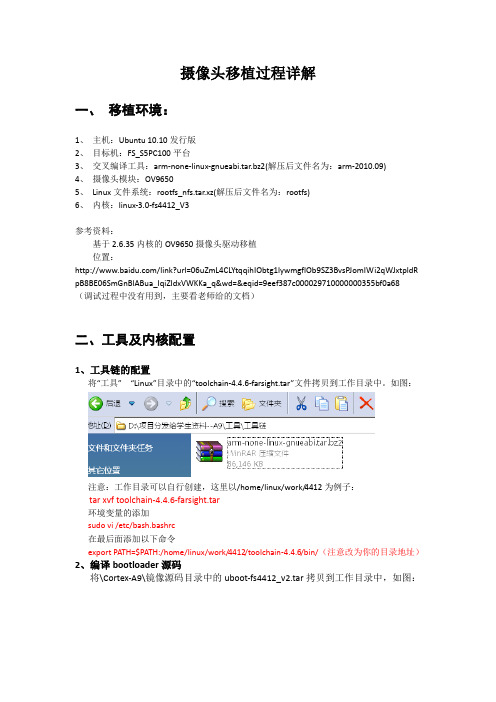
摄像头移植过程详解一、移植环境:1、主机:Ubuntu 10.10发行版2、目标机:FS_S5PC100平台3、交叉编译工具:arm-none-linux-gnueabi.tar.bz2(解压后文件名为:arm-2010.09)4、摄像头模块:OV96505、Linux文件系统:rootfs_nfs.tar.xz(解压后文件名为:rootfs)6、内核:linux-3.0-fs4412_V3参考资料:基于2.6.35内核的OV9650摄像头驱动移植位置:/link?url=06uZmL4CLYtqqihIObtg1lywmgflOb9SZ3BvsPJomIWi2qWJxtpldR pB8BE06SmGnBlABua_IqiZIdxVWKKa_q&wd=&eqid=9eef387c000029710000000355bf0a68 (调试过程中没有用到,主要看老师给的文档)二、工具及内核配置1、工具链的配置将“工具” “Linux”目录中的“toolchain-4.4.6-farsight.tar”文件拷贝到工作目录中。
如图:注意:工作目录可以自行创建,这里以/home/linux/work/4412为例子:tar xvf toolchain-4.4.6-farsight.tar环境变量的添加sudo vi /etc/bash.bashrc在最后面添加以下命令export PATH=$PATH:/home/linux/work/4412/toolchain-4.4.6/bin/(注意改为你的目录地址)2、编译bootloader源码将\Cortex-A9\镜像源码目录中的uboot-fs4412_v2.tar拷贝到工作目录中,如图:执行命令:tar xvf uboot-fs4412_v2.tar.xz解压后会出现uboot-fs4412_v2目录,进入/uboot-fs4412_v2/u-boot-2010.03目录cd /uboot-fs4412_v2/u-boot-2010.03修改Makefilevi Makefile找到如下图所示代码:修改为:注意:工具链为工程提供的见1、工具链的配置保存退出后执行脚本build_uboot.sh./build_uboot.sh编译结果如下图所示下图中的u-boot-fs4412.bin即是我们所需要的uboot文件3、编译linux内核源码将\Cortex-A9\镜像源码目录中的linux-3.0-fs4412_v3.tar.xz拷贝到工作目录中(/home/linux/work/4412)执行以下命令解压linux源码xz -d linux-3.0-fs4412_v3.tar.xz解压完后,linux-3.0-fs4412_v3.tar.xz解压变成linux-3.0-fs4412_v3.tar压缩包再执行以下命令解压linux-3.0-fs4412_v3.tar压缩包再执行以下命令解压linux-3.0-fs4412_v3.tar压缩包tar xvf linux-3.0-fs4412_v3.tar解压后如图:进入linux内核目录cd linux-3.0-fs4412_V3修改Makefilevi Makefile修改198行中代码198 CROSS_COMPILE?= /home/linux/toolchain/toolchain-4.4.6/bin/arm-cortex_a8-linux-gnueabi-改为:CROSS_COMPILE ?= arm-cortex_a8-linux-gnueabi-注:在编译前查看make menuconfig 对照下图选项,有两项没有一项没有加*。
USB摄像头驱动移植

1通过SMB服务将SDK-H264/server目录拷贝到项目目录下
2解压内核到当前目录
命令#cd /home/guoqian/project/h264/server/kernel
#tar zxvf linux.2.6.29.tar.gz
解压完成后的文件为linux2.6.29
3清理中间文件、配置文件命令#cd linux-2.6.29
#make distclean
4选择参考配置文件
命令#cp config-h264 .config
5配置内核
#make menucofing ARCH=arm CROSS_COMPILE=arm-linux-
要使内核支持USB摄像头驱动,内核必须选上以下配置选项Device drivers→multimedia devices→
Video capture adapters→V4L USB devices→
最后保存退出。
配置文件config-h264已配置了上述选项
6编译内核
命令#make ulmage ARCH=arm CROSS_COMPILE=arm-linux-
编译完成后生成的内核映像ulmage位于arch/arm/boot/目录下。
7将ulmage拷贝到tftp服务目录/tftpboot
命令#cp arch/arm/boot/ulmage /tftpboot/ulmage-h264
至此USB摄像头驱动移植的工作就完成了。
USB驱动移植教程
USB驱动移植教程USB驱动移植教程一.USB驱动框架在Linux系统中,提供了主机侧和设备侧视角的USB驱动框架,这里,仅仅讲解主机侧角度看到的USB驱动框架。
从主机侧的角度而言,需要编写的USB驱动程序包括主机控制器驱动和设备驱动两类。
USB主机控制器驱动程序控制插入其中的USB设备,而USB设备驱动程序控制该设备如何作为设备与主机通信。
在USB主机控制器驱动和USB设备驱动之间还有一层叫USB核心层。
USB核心负责USB驱动管理和协议处理工作,它通过定义一些数据结构、宏和功能函数,向上为USB设备驱动提供编程接口,向下为USB主机控制器驱动提供编程接口;通过全局变量维护整个系统的USB设备信息,完成设备热插拔控制、总线数据传输控制等。
说了那么多,无图无真相啊~~Linux USB主机侧驱动总体框架二.USB驱动移植步骤1.S5PV210主机控制驱动的移植USB主机控制器有3种规范,UHCI(Universal Host Controller Interface),这种规范主要是Intel、Via芯片公司提供支持PC主板的;OHCI(Open Host Controller Interface),这种规范是微软提出来的,主要应用在非PC系统上的嵌入式领域上的USB芯片;EHCI(Enhanced Host Controller Interface),这种后来为提高USB速度而提出的规范,它支持最高速度为480Mbps。
在《S5PV210_UM_REV1.1》手册上搜索OHCI关键词,会发现下面一段话这表明S5PV210这款CPU支持一个USB主机接口,同时支持EHCI和OHCI这两种规范,支持USB1.1和USB2.0规范,支持最高的外设传输速率为480Mbps。
注意了,它并不支持USB3.0规范的USB设备,所以做测试的时候,千万不要拿USB3.0规范的USB设备去测试。
2.1移植ohci-s5p驱动打开内核目录:driversusbhost,发现Linux系统提供了大量的主机控制器驱动,找遍所有平台,都没有找到ohci-s5p.c源码。
基于linux2.6.35内核的usb云台摄像头zc301驱动移植
宏定义要做修改 /*For usb-camera rotation */ #define VIDIOCSRIGHT _IOW('v',60, int) /* right */ #define VIDIOCSLEFT _IOW('v',61, int) /* left */ #define VIDIOCSUP _IOW('v',62, int) /* up */ #define VIDIOCSDOWN _IOW('v',63, int) /* down */
bit31~bit30 2位为 “区别读写” 区,作用是区分是读取命令还是写入命令。 bit29~bit15 14位为 "数据大小" 区,表示 ioctl() 中的 arg 变量传送的内存大小。 Bit14~bit08 8位为 “魔数"(也称为"幻数")区,这个值用以与其它设备驱动程序的 ioctl 命令进行区别。 bit07~bit00 8位为 "区别序号" 区,是区分命令的命令顺序序号。
void zc3xx_rotate_left(struct gspca_dev *gspca_dev) { reg_w(gspca_dev->dev, 0x000f,0x003b); reg_w(gspca_dev->dev,0x0007,0x003a); reg_w(gspca_dev->dev,0x0008,0x0038); reg_w(gspca_dev->dev,0x0008,0x003a); reg_w(gspca_dev->dev,0x0007,0x0038); reg_w(gspca_dev->dev,0x0007,0x003a); reg_w(gspca_dev->dev,0x0000,0x0038); #if 0 zc3xxRegWrite(gspca_dev->dev,0xa0,CLAMP(0x0f),0x3b,NULL,0); zc3xxRegWrite(gspca_dev->dev,0xa0,CLAMP(0x07),0x3a,NULL,0); zc3xxRegWrite(gspca_dev->dev,0xa0,CLAMP(0x08),0x38,NULL,0); zc3xxRegWrite(gspca_dev->dev,0xa0,CLAMP(0x08),0x3a,NULL,0); zc3xxRegWrite(gspca_dev->dev,0xa0,CLAMP(0x07),0x38,NULL,0); zc3xxRegWrite(gspca_dev->dev,0xa0,CLAMP(0x07),0x3a,NULL,0); zc3xxRegWrite(gspca_dev->dev,0xa0,CLAMP(0x00),0x38,NULL,0); #endif } 在gapca.h里面增加云台控制函数声明 void zc3xx_rotate_left(struct gspca_dev *gspca_dev); void zc3xx_rotate_up(struct gspca_dev *gspca_dev); void zc3xx_rotate_down(struct gspca_dev *gspca_dev); void zc3xx_rotate_right(struct gspca_dev *gspca_dev); 在Videodev2.h文件中添加如下代码: /*For usb-camera rotation */ #define VIDIOCSRIGHT _IOW('v',60, struct video_picture) /* right */ #define VIDIOCSLEFT _IOW('v',61, struct video_picture) /* left */ #define VIDIOCSUP _IOW('v',62, struct video_picture) /* up */ #define VIDIOCSDOWN _IOW('v',63, struct video_picture) /* down */ 注意: 在cgi的控制程序中也应该加如上红定义: 在后再根据编译中出现的问题不断修改,一般问题不会很大了!按着错误改就能成功!!!!!!! 问题: 出现内核的宏定义与应用程序宏定义数值不一样? 在内核打印结果
usb驱动安装详细教程
第一步,打开i9000的USB调试
步骤:手机桌面——设定——应用程式——开发——勾选USB调试,如图01:
第二步,使用数据线连接电脑与手机
第三步,打开设备管理器,电脑桌面——计算机——鼠标右键,选中管理——设备管理器
第四步,找到其他设备,会发现带有黄色叹号的Samsung_android 设备,如图02
第五步,选中Samsung_android 设备,鼠标右键——更新驱动——浏览计算机以查找驱动,选中刚下载的i9000驱动包,如图03
第六步,当第一次驱动安装完成后,在其他设备里会出现两个带黄色叹号的设备,如图04
第七步,重复第一次的驱动安装方法,依次更新这两个带有黄色叹号的设备,还是选中i9000驱动包,如图05
第八步,当这两个带黄色叹号的设备正确安装驱动后,在其他设备里就不会出现了,此时展开ADB Interface,会发现Samsung android adb 已经正常连接,至此,i9000驱动安装完毕。
压缩包里有驱动附件和详细的图片安装过程。
+如何开发wince usb 摄像头的驱动(转)
这段时间成功的开发了中星微301H摄像头的wince驱动和视频采集程序。
中星微摄像头出来的数据为JPEG格式,我们将其直接读出,交给应用程序来解码,就可以显示图像。
中间的过程我们可以参考Linux GSPCA的驱动,将其移植到wince中就可以了。
中间的关键是要理解Linux的驱动,知道摄像头的初始化,取得一幅完整的图像。
幸好我以前开发过Linux USB的主和从设备,Wince USB的主和从设备的驱动,虽然如此,我还是花了一些时间,主要是要稳定,可靠。
下面是我参考的一些资料,非常有用。
USB摄像头的数据采集的一般流程为传感器接口――>图像信号处理-->图像压缩-->USB传输。
一般USB摄像头对采集图像都作了压缩(内置JPEG硬件压缩),压缩是为了提高图像传输效率,也就是动态分配USB带宽技术,使DSP采集的图像可以在USB1.0上传输效率提高,现在能够使640*480帧率高达30帧/秒。
至于传输协议,目前几乎所有的厂商使用自己的图像传输协议。
将来USB摄像头会有统一的标准。
要将USB摄像头和嵌入式系统相连时可能的,但是最好嵌入式系统使用Linux来做操作系统。
这样可以找到开发源代码的驱动,然后再针对自己的要求作二次开发。
JPEG的文件格式JPEG 的文件格式JPEG文件大体上可以分成以下两个部分:标记码(Tag)加压缩数据。
先介绍标记码部分。
标记码部分给出了JPEG图象的所有信息(有点类似于BMP中的头信息,但要复杂的多),如图象的宽、高、Huffman表、量化表等等。
标记码有很多,但绝大多数的JPEG文件只包含几种。
注意JPEG/JFIF 文件格式使用Motorola 格式,而不是Intel格式,就是说,如果是一个字的话, 高字节在前, 低字节在后.JPG文件是由一个个段(segments)构成的. 每个段长度<=65535.每个段从一个标记字开始.标记字都是0xff打头的,以非0字节和0xFF 结束.例如"FFDA","FFC4","FFC0".每个标记有它特定意义,这是由第2字节指明的.例如,SOS(StartOf Scan= "FFDA")指明了你应该开始解码.另一个标记DQT(Define Quantization Table = 0xFFDB)就是说它后面有64字节的quantization表在处理JPG文件时,如果你碰到一个0xFF,而它后面的字节不是0,并且这个字节没有意义.那么你遇到的0xFF字节必须被忽略.(一些JPG 里,常用用0xFF做某些填充用途)如果你在做huffman编码时碰巧产生了一个0xFF,那么就用0xFF 0x00代替.就是说在jpeg图形解码时碰到FF00就把它当作FF处理.另外在huffman编码区域结束时,碰到几个bit没有用的时候,应该用1 去填充.然后后面跟FF.下面是必须处理的标记SOF0 = Start Of Frame 0 = FFC0SOS = Start Of Scan = FFDAAPP0 = it"s the marker used to identify a JPG file which uses the JFIF specification = FFE0COM = Comment = FFFEDNL = Define Number of Lines = FFDCDRI = Define Restart Interval = FFDDDQT = Define Quantization Table = FFDBDHT = Define Huffman Table = FFC4段的类型:SOF0: Start Of Frame 0:~~~~~~~~~~~~~~~~~~~~~~~- $ff, $c0 (SOF0)- 长度(高字节, 低字节), 8+components*3- 数据精度(1 byte) 每个样本位数, 通常是8 (大多数软件不支持12 和16)- 图片高度(高字节, 低字节), 如果不支持DNL 就必须>0- 图片宽度(高字节, 低字节), 如果不支持DNL 就必须>0- components 数量(1 byte), 灰度图是1, YCbCr/YIQ 彩色图是3, CMYK 彩色图是4- 每个component: 3 bytes- component id (1 = Y, 2 = Cb, 3 = Cr, 4 = I, 5 = Q)- 采样系数(bit 0-3 vert., 4-7 hor.)- quantization table 号DRI: Define Restart Interval:~~~~~~~~~~~~~~~~~~~~~~~~~~~~~- $ff, $dd (DRI)- 长度(高字节, 低字节), 必须是4- MCU 块的单元中的重新开始间隔(高字节, 低字节),意思是说, 每n 个MCU 块就有一个RSTn 标记.第一个标记是RST0, 然后是RST1 等, RST7 后再从RST0 重复DQT: Define Quantization Table:~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~- $ff, $db (DQT)- 长度(高字节, 低字节)- QT 信息(1 byte):bit 0..3: QT 号(0..3, 否则错误)bit 4..7: QT 精度, 0 = 8 bit, 否则16 bit- n 字节的QT, n = 64*(精度+1)备注:- 一个单独的DQT 段可以包含多个QT, 每个都有自己的信息字节- 当精度=1 (16 bit), 每个字都是高位在前低位在后DAC: Define Arithmetic Table:~~~~~~~~~~~~~~~~~~~~~~~~~~~~~法律原因, 现在的软件不支持arithmetic 编码.不能生产使用arithmetic 编码的JPEG 文件DHT: Define Huffman Table:~~~~~~~~~~~~~~~~~~~~~~~~~~- $ff, $c4 (DHT)- 长度(高字节, 低字节)- HT 信息(1 byte):bit 0..3: HT 号(0..3, 否则错误)bit 4 : HT 类型, 0 = DC table, 1 = AC tablebit 5..7: 必须是0- 16 bytes: 长度是1..16 代码的符号数. 这16 个数的和应该<=256- n bytes: 一个包含了按递增次序代码长度排列的符号表(n = 代码总数)备注:- 一个单独的DHT 段可以包含多个HT, 每个都有自己的信息字节COM: 注释:~~~~~~~~~~- $ff, $fe (COM)- 注释长度(高字节, 低字节) = L+2- 注释为长度为L 的字符流SOS: Start Of Scan:~~~~~~~~~~~~~~~~~~~- $ff, $da (SOS)- 长度(高字节, 低字节), 必须是6+2*(扫描行内组件的数量)- 扫描行内组件的数量(1 byte), 必须>= 1 , <=4 (否则是错的) 通常是3 - 每个组件: 2 bytes- component id (1 = Y, 2 = Cb, 3 = Cr, 4 = I, 5 = Q), 见SOF0- 使用的Huffman 表:- bit 0..3: AC table (0..3)- bit 4..7: DC table (0..3)- 忽略3 bytes (???)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Kernel version :2.6.22.6
Crosstool :arm-softfloat-linux-gnu-gcc-3.4.5
Board :FS2410
System :ubuntu 8.10
Source :spcaview-20061208.tar.gz SDL-1.2.13.rar servfox-R1_1_3.rar gspcav1-20071224.tar.gz
整理:LXP
一、移植gspcav1-20071224
FS2410开发板上移植的是Linux-2.6.22.6内核,USB及CS8900A均能工作,由于linux-2.6.22.6/drivers/usb 目录下没有media 目录,故移植步骤如下:
[linux@farsight usb]$ pwd
/work/kernel/linux-2.6.22.6/drivers/usb
[linux@farsight usb]$ vi Kconfig
添加
source "drivers/usb/media/Kconfig"
[linux@weijing usb]$ vi Makefile
添加
obj-$(CONFIG_USB_SPCA5XX) += media/
[linux@weijing media]$ pwd
/work/kernel/linux-2.6.22.6/drivers/usb/media
[linux@weijing media]$ vi Kconfig
#
# USB Multimedia device configuration
#
comment "USB Multimedia devices"
depends on USB
config USB_SPCA5XX
tristate "USB SPCA5XX Sunplus/Vimicro/Sonix jpeg Cameras"
depends on USB && VIDEO_DEV
[linux@weijing media]$ vi Makefile
#
# Makefile for USB Media drivers
#
obj-$(CONFIG_USB_SPCA5XX) += gspcav1-20071224/
[linux@weijing gspcav1-20071224]$ pwd
/work/kernel/linux-2.6.22.6/drivers/usb/media/gspcav1-20071224
[linux@weijing gspcav1-20071224]$ vi Makefile
gspca-objs := gspca_core.o decoder/gspcadecoder.o
obj-$(CONFIG_USB_SPCA5XX) += gspca.o
clean:
rm -f *.[oas] .*.flags *.ko .*.cmd .*.d .*.tmp *.mod.c
rm -rf .tmp_versions
(1)Multimedia devices --->
(*)Video For Linux
(2)USB support --->
(*)Support for Host-side USB
--- USB Host Controller Drivers
(*) OHCI HCD support
(3)--- USB Multimedia devices
[M] USB SPCA5XX Sunplus/Vimicro/Sonix jpeg Cameras
注意:这里这一项只能动态加载,不能静态编译进内核,否则会出现如下错误:
….undefined referance to ‘__this_modules’;
另外:编译内核出现这种错误….undefined referance to ‘__this_modules’;
则原因可能是:有些模块只能以[M]方式加载,不能以(*)形式加载。
内核编译完成之后,把~/linux-2.6.22.6/drivers/usb/media/gspcav1-20071224/下的gspca.ko文件cp到/source/rootfs中去。
(注:/source/rootfs是板子的根文件系统,这里采用动态下载的调试方式)
下载Servfox-R1_1_3解压进入其目录,将其中的Makefile.arm修改为Makefile,并修改Makefile里面的CC为arm-softfloat-linux-gnu-gcc,因为默认的是加载的动态库,因此还需
要修改Makefile中的SERVFLAGS为SERVFLAGS= -O2 –DLINUX $(W ARNINGS) –static,其中-static是我们添加的内容,make之后生成servfox。
加载驱动后可以运行servfox –g –d /dev/video0 –s 320x240 –w 7070 运行servfox
# ./servfox -d /dev/video0 -g -s 640x480 -w 7070
servfox version: 1.1.3 date: 11:12:2005 (C) mxhaard@magic.fr
wrong spca5xx device
Waiting .... for connection. CTrl_c to stop !!!!
Got connection from 192.168.1.222
spcaview源码包解压,进入解压后的目录,make后会报错,一般需要安装
SDL库,去网上下载后安装SDL库,在PC 机上安装SDL库:
解压:tar xvf SDL-1.2.13.tar.tar
配置:./configure
编译:make
安装:sudo make install
spcaview解压目录修改Makefile中的修改Makefile中的SDLLIBS =$(shell sdl-config --libs) 和SDLFLAGS = $(shell sdl-config --cflags),这两句主要是指定了SDL库的库路径和编译选项。
Make之后生成spcaview,在客户端运行spcaview –w 服务器ip:服务器端口号。
就可以采集图像了,
[root@farsight spcaview-20061208]# ./spcaview -g -w 192.168.1.17
Spcaview version: 1.1.7 date: 06:11:2006 (C) mxhaard@magic.fr
ERROR Set default port to 7070
using Server 192.168.1.17 Port 7070
bright 32768 contrast 32768
已经被编译进内核)
insmod gspca.ko (这是摄像头驱动)
2创建设备节点
mknod /dev/video0 c 81 0
这一步一般不用做,在insmod gspca.ko时,会自动创建该节点
3采集图像
#./servfox -d /dev/video0 -s 320x240 -w 7070
–w 192.168.1.186:7070
-g参数一定要加,否则会出现段错误
PC机上用Windows下的网页测试(如果开发板里装了BOA服务器):
spcaview后,还会产生<http-java-applet>,此是WEB客户端,将此客户端上传到开发板上的WEB文件夹中,则在浏览器输入http://192.168.1.186/index-sample.html则可看到摄像头采集来的图片了。
web SERVER是移植boa,移植方法略。