光学投影式三维轮廓测量技术综述
光学投影式三维轮廓测量技术研究

光学投影式三维轮廓测量技术研究摘要:光学投影式三维轮廓测量技术是一种非接触式、高效率的三维测量手段,其能够对被测物的表面轮廓进行快速、准确的获取。
本文介绍了光学投影式三维轮廓测量技术的基本原理、系统组成以及应用领域,并着重探讨了其误差来源和误差补偿方法,为光学投影式三维轮廓测量技术的进一步发展提供参考。
关键词:光学投影式三维轮廓测量技术;误差来源;误差补偿;应用领域。
一、概述随着现代制造工艺的发展,对于产品的精度要求越来越高,因此,对于产品的三维测量技术也有了更高的要求。
光学投影式三维轮廓测量技术是一种非接触式、高效率的三维测量手段,其能够对被测物的表面轮廓进行快速、准确的获取。
1. 非接触式测量,不损伤被测物;2. 快速测量:可以实现对复杂表面轮廓的快速获取;3. 高精度测量:可以满足精度要求较高的测量需求;4. 高度自动化:测量数据的处理和分析可以实现自动化。
二、基本原理光学投影式三维轮廓测量技术采用投影法测量被测物表面的轮廓,其基本原理可以用下图表示:如图所示,测量系统由投影系统和相机系统组成。
投影系统将光线通过透镜进行聚焦,形成高斯光束,使其在被测物表面上形成一个条形状的光影。
相机系统捕捉被测物的轮廓图像,并通过测量分析得到被测物轮廓的三维信息。
在测量过程中,可以通过调整相机和投影系统的相对位置来满足测量精度的要求。
三、系统组成光学投影式三维轮廓测量技术的系统由投影系统、相机系统、支撑系统和计算机控制系统等几个部分组成。
1. 投影系统投影系统主要由光源、透镜、滤光片和投影面组成。
光源一般使用激光或LED光源,透镜可以将光线捕获并进行聚焦,滤光片可以增强光源的亮度和对比度,投影面是被测物表面上形成的一条光影。
2. 相机系统相机系统通常采用高速、高分辨率的相机,可以通过调整相机参数来满足不同精度测量的需求。
相机系统一般分为两种配置:单目相机和双目相机。
光学投影式三维轮廓测量技术综述_郝煜栋
第5期1998年9月 光学技术O PT ICA L T ECHN O L OG YN o.5Sept.1998光学投影式三维轮廓测量技术综述郝煜栋 赵洋 李达成(精密测试技术及仪器国家重点实验室,清华大学精密仪器与机械学系,北京100084)摘 要:主要用于散射物体的宏观轮廓测量的光学投影式轮廓测量技术可以分为两大类:直接三角法和相位测量法。
直接三角法包括激光逐点扫描法、光切法和新近出现的二元编码图样投影法。
相位测量法以测量投影到物体上的变形栅像的相位为基础,包括莫尔法、移相法、傅氏变换法等等。
本文以基于相位测量和光栅投影法为重点综述了光学投影式轮廓测量技术的几种典型方法,讨论了它们的优缺点,并分析了研究热点和发展方向。
关键词:光学轮廓测量,光学投影,三角法,相位测量,莫尔技术,移相法,傅氏变换法,叠相还原。
Review of optical profilometry based on light pattern projectionHao Yudong Zhao Yang Li Dacheng(State K ey La bo rat or y o f Pr ecision M easur em ent T echno lo gy and Instr ument s Dept.o f Pr ecision Instr uments and M echano lo gy,T sing hua U niver sity,Beijing100084) Abstract:Optical pr ofilo metr y based o n lig ht pat tern pro jectio n for m acr oscopic shape measur e-ment of diffuse objects can be classified into tw o g ro ups:dir ect tr iang ulation and g ra ting pr oject ion phase measurem ent met ho d.T he for mer includes laser spot scanning,lig ht sect ioning and newly devel-oped binar y-enco ded pa ttern pr ojection pro filometr y.T he latter,w hich is based on the phase measur e-ment o f def or med gr ating pro jected o nt o t he object surface,includes mo ir contour ing,phase shifting method,F our ier tra nsfo rm technique,etc.So me typical techniques are r eviewed,w ith emphasis on gr ating pro jectio n phase measurement metho d.T heir advantag es and disadv antag es ar e discussed.Some cur r ent ho t spo ts and futur e directio ns a re analyzed.Keywords:o pt ical pro filomet ry,light pa tter n pro jectio n,triangulatio n,phase mea sur ement,moir conto ur ing,phase-shifting,F ourier tr ansfor m pr o filometr y,phase unwr apping. 一、引 言物体的三维轮廓测量在高速在线检测、质量控制、机器/机器人视觉、反求工程、CAD/ CAM以及医疗诊断等领域的应用日益重要。
光学投影层析三维成像测量实验系统的设计概述

光学投影层析三维成像测量实验系统的设计摘要光学投影式三维轮廓测量在机器/机器人视觉、CAD/CAM以及医疗诊断等领域有重要的应用,这种测量方法具有非接触性、无破坏、数据获取速度快等优点,其测量系统是宏观光学轮廓仪中最有发展前途的一种。
本课题拟采用激光光源(或普通卤素灯作为光源),应用光学系统、计算机控制,进行图像采集、图像处理,设计成像系统的断层图像重建及三维图像显示实验系统,并对其成像理论、成像质量及成像误差进行理论分析。
该项目完成的光学投影层析三维成像测量实验系统适用于光学教学演示,其理论分析有利于学生积极的汲取现代光学发展的科研成果、思路和方法,从而潜移默化的培养学生的科学素养和创新能力。
关键词:光学投影层析,三维成像,CT技术目录1.引言 (1)2.CT原理及重建算法 (2)整个实验用到的理论相关联名称2.1 CT技术原理 (3)2.2 OPT原理简介 (4)3.1 滤波反投影算法的快速实现3. 光学投影层析三维成像测量实验系统 (5)3.1实验系统的设计 (6)3.2 光学投影层析三维成像测量实验系统3.3 影响图像重建质量的因素分析 (7)4. 结论 (11)5. 参考文献 (13)图表清单1.引言2002年4月英国科学家Sharpe在《Science》上首次报道了光学投影层析技术(optical projection tomography,OPT),这是一种新的三维显微成像技术,是显微技术和CT技术的结合。
光学投影层析巧妙的利用了光学成像中“景深”的概念,实现了光学CT,和其它光学三维成像技术相比,结构简单、成本较低、成像速度快,在对成像分辨率要求不高的情况下,容易建立起光学投影层析三维成像测量系统。
光学三维成像代表着光学领域的前沿技术,这些技术涉及光学、计算机和图像处理等相关领域的知识,通过本项目--光学投影层析三维成像测量实验系统的设计,将是基础光学通向现代光学科技的不可多得的窗口之一,不仅显示基础知识的生命力,也反映基础知识的时代性,而且本项目实现所需成本较低、物理思想清晰,适用于物理实验教学,并适合作为大学生的综合设计性物理实验项目进行开发研究,同时对于激发大学生的学习兴趣、开阔大学生的视野和思路、培养综合科研素养均有很大的帮助。
光学投影式三维轮廓测量技术研究

光学投影式三维轮廓测量技术研究
光学投影式三维轮廓测量技术原理
光学投影式三维轮廓测量技术主要由投影装置、相机系统和计算机软件组成,其工作原理如下:
1. 投影装置:光学投影式三维轮廓测量技术使用高亮度、高分辨率的投影仪对待测物体进行光学投影。
投影仪通过计算机控制,将预先设定的光栅图案或条纹图案投影到待测物体表面。
2. 相机系统:相机系统通常由高分辨率的工业相机组成,用于捕捉待测物体表面的投影图案。
相机系统通过适当的角度和距离布置,以获得物体表面的多个投影图像。
3. 计算机软件:计算机软件主要负责处理和分析相机捕捉到的图像数据,通过图像处理算法提取出物体表面的三维轮廓信息。
光学投影式三维轮廓测量技术应用
光学投影式三维轮廓测量技术在工业领域具有广泛的应用,主要包括以下几个方面:
1. 三维检测与测量:光学投影式三维轮廓测量技术可以实现对工件的高精度三维轮廓测量,适用于汽车制造、航空航天、电子设备等行业的产品检测与测量。
2. 三维重建与建模:通过光学投影式三维轮廓测量技术可以对物体进行三维重建与建模,为产品设计、建筑设计、文物保护等领域提供高精度的三维数据支持。
3. 质量控制与检验:光学投影式三维轮廓测量技术可以实现对产品的尺寸、形状、表面质量等进行全方位的质量控制与检验,提高产品的质量稳定性和产品一致性。
4. 快速成像与测量:光学投影式三维轮廓测量技术具有快速成像和测量速度快的特点,适用于对物体进行快速成像和测量,提高生产效率。
3d轮廓测量的原理和应用
3D轮廓测量的原理和应用1. 引言在现代工业和科学研究中,精确测量物体的形状和轮廓是一个重要的任务。
而3D轮廓测量技术则能够提供高精度的测量结果,被广泛应用于制造业、医疗、地理勘探等领域。
本文将介绍3D轮廓测量的原理和应用。
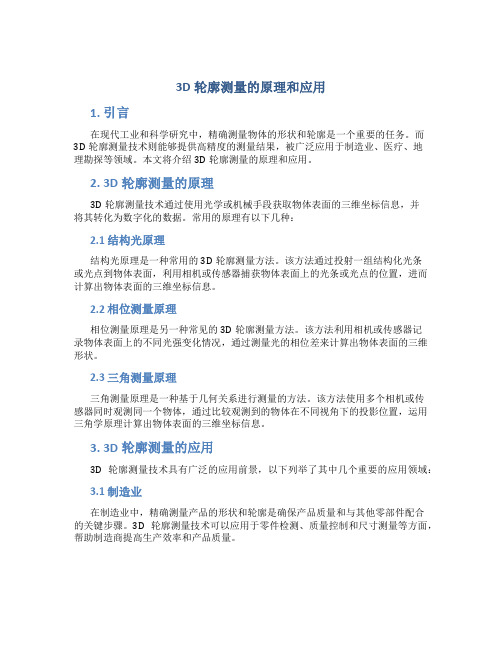
2. 3D轮廓测量的原理3D轮廓测量技术通过使用光学或机械手段获取物体表面的三维坐标信息,并将其转化为数字化的数据。
常用的原理有以下几种:2.1 结构光原理结构光原理是一种常用的3D轮廓测量方法。
该方法通过投射一组结构化光条或光点到物体表面,利用相机或传感器捕获物体表面上的光条或光点的位置,进而计算出物体表面的三维坐标信息。
2.2 相位测量原理相位测量原理是另一种常见的3D轮廓测量方法。
该方法利用相机或传感器记录物体表面上的不同光强变化情况,通过测量光的相位差来计算出物体表面的三维形状。
2.3 三角测量原理三角测量原理是一种基于几何关系进行测量的方法。
该方法使用多个相机或传感器同时观测同一个物体,通过比较观测到的物体在不同视角下的投影位置,运用三角学原理计算出物体表面的三维坐标信息。
3. 3D轮廓测量的应用3D轮廓测量技术具有广泛的应用前景,以下列举了其中几个重要的应用领域:3.1 制造业在制造业中,精确测量产品的形状和轮廓是确保产品质量和与其他零部件配合的关键步骤。
3D轮廓测量技术可以应用于零件检测、质量控制和尺寸测量等方面,帮助制造商提高生产效率和产品质量。
3.2 医疗领域在医疗领域中,3D轮廓测量技术可以应用于口腔、牙齿、脸部等部位的形态测量。
例如,在牙科领域中,3D轮廓测量可以帮助制作牙套、矫正器和义齿等医疗器械。
3.3 地理勘探地理勘探中需要对地表进行高精度的测量,以获取地形、地貌等信息。
3D轮廓测量技术可以应用于地图绘制、土地开发和环境调查等领域,提供准确的地理数据支持。
3.4 艺术和文化遗产保护在艺术和文化遗产保护领域,3D轮廓测量技术可以应用于古建筑、雕塑等文物的数字化保护。
光学测量三维形貌的综述汇总

光学测量三维形貌的综述摘要。
我们首先对使用各种光学方法对三维形貌的测量进行了概述。
然后,我们着重介绍结构光技术,以及结构光技术的各种光学配置,图像采集技术,数据后处理和分析方法以及此技术的优势和局限性。
并展示了一些工业应用的例子。
对需要进一步研发的重要领域进行了讨论。
文章最后,对有关三维形貌测量的参考文献做了总结,虽然并不旨在完全详细的。
2000年光照片仪表工程师学会。
关键词:三维形貌测量,坐标测量,光学方法,综述。
1999年7月12日接收论文;1999年8月23日接收修订稿;1999年8月23日准许出版。
1 引言在工业上,对精确测量物体的三维形貌测量有需求,以加速产品的开发和保证制造质量。
三维形貌测量的应用包括智能机器人的控制,车辆引导的障碍物检测,模具开发的尺寸测量,冲压面板的几何检查,应力/应变以及振动的精确测量。
此外,自动在线检测与识别的问题可以转换成三维塑造对象的测量,例如车身面板油漆缺陷和凹痕检查。
近来,随着计算机技术的发展,再加上数码影像设备,电光元件,激光等光源设备的发展,现在三维形貌测量中的一些技术已经被成功地商业化。
对于一个小规模的深度或形貌,使用共焦显微镜或者其他三维显微镜可以达到微米甚至纳米级精度的测量。
然而,关键是相对准确性或测量深度的一部分。
这对大尺寸的形貌测量形成一个真正的挑战。
例如,0.5米深度的测量如何才是准确的?此外,对于大尺寸的深度和形貌测定,通常需要更多的摄像机和照相机的位置来获得多个形貌从而最终拼合整体的大形貌。
这就引出了如何高精度拼接这些形貌以及进行局部和全局坐标转换。
这随后产生另一个要解决的问题,即克服镜头畸变和像差。
三位形貌测量后的数据必须与计算机辅助工程(CAE)模型进行比对。
本文对使用各种光学方法的三维形貌的测量进行了概述。
然后,着重于结构光测量系统,来测量较大尺寸和360度的形貌。
然后,概述了各个细节方面,如绝对相位测量,结构光光源,图像采集传感器,摄像头模型和标定,随后讨论了全局和局部坐标转换方法。
光学三维测量技术综述精选文档
光学三维测量技术综述精选文档TTMS system office room 【TTMS16H-TTMS2A-TTMS8Q8-光学三维测量技术综述1.引言客观景物三维信息的获取是计算机辅助设计、三维重建以及三维成像技术中的基础环节,被测物体的三维信息的快速、准确的获得在虚拟现实、逆向工程、生物与医学工程等领域有着广泛的应用[1]。
三维测量方法总的包括两大类,接触式以及非接触式。
如图所示。
图三维测量方法分类接触式的三维测量方法到目前为止已经发展了很长一段时间,这方面的技术理论已经非常完善和成熟,所以,在实际的测量中会有比较高的准确性。
但是尽管如此,依然会有一些缺点[2]:(1) 在测量过程中,接触式测量必须要接触被测物体,这就很容易造成被测物体表面的划伤。
(2) 接触式测量设备在经过长时间的使用之后,测量头有时会出现形变现象,这无疑会对整个测量结果造成影响。
(3) 接触式测量要依靠测量头遍历被测物体上所有的点,可见,其测量效率还是相当低的。
接触式三维测量技术发展已久,应用最广泛的莫过于三坐标测量机。
该方法基于精密机械,并结合了当前一些比较先进技术,如光学、计算机等。
并且该方法现在已经得到了广泛的应用,特别是在一些复杂物体的轮廓、尺寸等信息的精确测量上。
在测量过程中,三坐标测量机的测量头在世界坐标系的三个坐标轴上都可以移动,而且测量头可以到达被测物体上的任意一个位置上,只要测量头能到达该位置,测量机就可以得到该位置的坐标,而且可以达到微米级的测量精度。
但由于三坐标机测量系统成本较高,加之上述的一些缺点,广泛应用还不太现实。
非接触式三维测量技术一般通过利用磁学、光学、声学等学科中的物理量测量物体表面点坐标位置。
核磁共振法、工业计算机断层扫描法、超声波数字化法等非光学的非接触式三维测量方法也都可以测量物体的内部及外部结构的表面信息,且不需要破坏被测物体,但是这种测量方法的精度不高。
而光学三维轮廓测量由于其非接触性、高精度与高分辨率,在CAD /CAE、反求工程、在线检测与质量保证、多媒体技术、医疗诊断、机器视觉等领域得到日益广泛的应用,被公认是最有前途的三维轮廓测量方法[3]。
三维光学轮廓测量仪综述
三维光学轮廓测量仪综述
三维光学轮廓测量仪是利用光学显微技术、白光干涉扫描技术、计算机软件控制技术和PZT垂直扫描技术对工件进行非接触测量,还原出工件3D表面形貌宏微观信息,并通过软件提供的多种工具对表面形貌进行各种功能参数数据处理,实现对各种工件表面形貌的微纳米测量和分析的光学计量仪器。
三维光学轮廓测量仪典型特点:
1) 使用白光干涉测量技术,非接触式、非破坏性、快速表面形貌测量与分析;
2) 台阶高度测量分辨率达0.1 nm;
3) 可搭配黑白或彩色相机进行2D、3D显示和测量功能;
4) 配置电动鼻轮,可同时挂载多种物镜并程序化控制切换使用;
5) 采用双光源模式,适应特殊样品测量;
6) 测量范围100×100mm(可按客户定制尺寸);
7) 配置低倍率物镜(2.5×和5×倍率),可进行大面积3D测量;
8) 提供多种表面参数测量功能,如断差高度、夹角、面积、体积、粗糙度、波纹度、
薄膜厚度及平面度;
9) 提供超过250多种各类参数(含2D、3D)计算;
10) 友好的人机界面,简便的图形化控制系统及3D图型显示;
11) 多种交换文件格式,可储存与读取多种3D轮廓文件格式;
三维光学轮廓测量仪典型应用:
对各种产品、部件和材料表面的平面度、粗糙度、波纹度、共面性、面形轮廓、表面缺陷、磨损情况、腐蚀情况、孔隙间隙、台阶高度、蚀刻情况、弯曲变形情况、加工情况、材料支撑率等表面形貌特征进行测量和分析。
应用范例:
三维光学轮廓测量仪主要技术指标:。
光学测量三维形貌的综述汇总
光学测量三维形貌的综述汇总光学测量三维形貌是一种非接触式的测量技术,可以实时且非破坏地获取物体表面的三维形貌信息。
这种测量技术在工业制造、医学、文化遗产保护等领域具有广泛的应用。
本文将综述光学测量三维形貌的原理、方法、应用以及未来的发展方向。
光学测量三维形貌的原理是基于光的散射与反射特性。
光线在物体表面的反射或散射会受到物体表面形貌的影响,通过测量光线的变化可以确定物体表面的形状和高度信息。
光学测量三维形貌的主要方法可以分为三种:三角法、光栅投影法和相位移法。
三角法是光学测量三维形貌最常用的方法之一、它基于三角形的几何关系,通过测量物体表面上多个点与光源之间的距离和角度,计算出物体表面的形状和高度信息。
这种方法简单直观,测量精度较高,适用于表面比较平整的物体。
光栅投影法是一种通过投射光栅纹影来测量三维形貌的方法。
它利用光栅的周期性纹理,在物体表面投射一组光栅纹影,通过测量光栅纹影的形变和位移,推导出物体表面的形状和高度信息。
这种方法适用于表面比较复杂的物体,如曲面和薄膜。
相位移法是一种通过测量光波的相位变化来计算三维形貌的方法。
它利用光的干涉原理,通过在物体表面上投射一组相干光束,并通过相位移的测量得到物体表面的高度信息。
这种方法具有测量精度高、适用范围广的优点,但需要复杂的光学系统和数据处理算法。
光学测量三维形貌在工业制造中有广泛的应用。
例如,在汽车制造中,可以用光学测量技术来评估车身的质量和精度;在航空航天制造中,可以利用光学测量技术来检测飞机表面的缺陷和变形;在电子制造中,可以通过光学测量技术对电路板和芯片进行形貌测量。
在医学领域,光学测量三维形貌也具有重要的应用。
例如,可以利用光学测量技术来测量人体的表面形貌,用于人体测量、假肢制造和医学成像;还可以利用光学测量技术对生物组织的表面形貌进行分析和诊断。
光学测量三维形貌的未来发展方向主要包括提高测量精度、扩展测量范围和提高测量速度。
随着光学技术、图像处理算法和计算机性能的不断提高,光学测量三维形貌的应用将更加广泛。
光学投影式三维轮廓测量技术研究
光学投影式三维轮廓测量技术研究光学投影式三维轮廓测量技术是一种利用光学原理进行三维物体表面形状测量的技术。
它可以通过对物体表面投影光线,并观察投影结果,来获得物体表面的三维轮廓信息。
光学投影式三维轮廓测量技术主要包括两个关键步骤:光源的投影和投影结果的测量。
在光源的投影阶段,通常采用点光源或线光源来照射待测物体。
通过改变光源的位置、光源的形状或光的颜色等参数,可以实现不同投影效果,进而获取不同程度的表面轮廓信息。
在投影结果的测量阶段,使用合适的测量仪器(如相机或扫描仪)对投影结果进行捕捉,并进行图像处理和数据分析,从而获得物体表面的三维轮廓信息。
1. 非接触性测量:光学投影式三维轮廓测量技术可以在不接触物体的情况下进行测量,避免了传统测量方法中可能产生的物体损伤或变形问题。
2. 高精度测量:通过合适的光源和测量仪器,以及精确的数据处理算法,可以实现高精度的物体表面形状测量。
对于一些具有复杂表面形状或微小特征的物体,光学投影式三维轮廓测量技术可以提供更准确的测量结果。
3. 快速测量:与传统的三维测量方法相比,光学投影式三维轮廓测量技术通常具有较快的测量速度。
这主要得益于光学投影的非接触性和计算机图像处理的高效性。
光学投影式三维轮廓测量技术在众多领域都有广泛的应用。
例如在工业制造中,可以用于产品质量检测、尺寸测量和形状分析等方面;在医学领域,可以用于人体无创检测、病变分析和手术导航等方面;在文化遗产保护中,可以用于文物修复和数字化保存等方面。
光学投影式三维轮廓测量技术是一种灵活、精确和高效的三维测量方法,具有广泛的应用前景。
随着相关技术的不断发展和改进,相信它将在更多领域展示出更多的潜力和优势。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
轮廓测量技术。 总的来说, 光学投影式轮廓测量技术可以 分为两大类: 直接三角地和相位测量法。 本节将 以后者为重点分别介绍这几种方法。 二、 测量原理 11 直接三角法 直接三角法轮廓测量技术包括激光逐点扫 描法、 光切法和新近兴起的二元编码图样投影 法[ 1 ]。 这些方法都是以纯粹的三角测量原理为 基础, 通过出射点、 投影点和成像点三者之间的 几何成像关系确定物体各点高度的, 因此其测 量关键在于确定三者之间的对应关系。 逐点法 用一个光点扫描物体, 虽然简单可靠, 但测量耗 时; 光切法采用一维线形图样扫描物体, 速度比
+
( 3)
1 b ( x , y ) exp [ i Υ( x , y ) ] ( 10) 2
式 ( 9) 中 g ( x , y ) 对 x 的傅氏变换为 G (f , y ) = A (f , y ) + C (f - f 0 , y )+ C 3 (f 来自 f 0 , y ) ( 11)
1 1 bco s ( 4Π f 0 x + Υ- Ω bco s ( Υ+ Ωi ) i) + 2 2 ( 4)
的。
( 1) 传统的莫尔等高法
莫尔等高法[ 3 ] 将变形栅像与周期相同的参 考光栅叠加, 观察到的图样 ( 高频成分在观测中 被滤除) 描绘出了物体的等高线。 正如干涉图的 条纹分析最初是以条纹跟踪为基础的, 传统的 莫尔等高法通过分配条纹级次和确定条纹中心 解调等高线上的高度信息。 这种方法丢失了符 号信息, 即无法从一幅等高线图上判断凹凸; 只 在等高线上带有高度信息 ( 即只测量了整数级 相位) , 而等高线之间则需要插补运算。 在现代 轮廓测量中, 这种方法已很少使用了。 ( 2) 时域相位测量技术 时域相位测量技术的代表形式是移相式轮 廓测量法[ 4 ]。 移相法有多种方案, 出现较早的N 步法将投影到物体表面的正弦光栅条纹移动 N 次, 每次移动的相位值为 2Π (N + 1 ) , 从而 得到 N + 1 幅图像。令 I n 代表第 n 幅图像上某 点的强度, 则
Rev iew of optica l prof ilom etry ba sed on l ight pa ttern projection
Ha o Yudong Zha o Ya ng L i D a che ng
(Sta te Key L abo ra to ry of P recision M ea su rem en t T echno logy and In strum en ts D ep t. of P recision In strum en ts and M echano logy, T singhua U n iversity, B eijing 100084) Abstract: O p tica l p rofilom etry ba sed on ligh t p a ttern p ro jection fo r m acro scop ic shap e m ea su re2 m en t of diffu se ob jects can be cla ssified in to tw o group s: direct triangu la tion and gra ting p ro jection p ha se m ea su rem en t m ethod. T he fo rm er includes la ser spo t scann ing, ligh t section ing and new ly devel2 op ed b ina ry 2encoded p a ttern p ro jection p rofilom etry. T he la tter, w h ich is ba sed on the p ha se m ea su re2 m en t of defo rm ed gra ting p ro jected on to the ob ject su rface, includes m o irécon tou ring, p ha se sh ifting m ethod, Fou rier tran sfo rm techn ique, etc. Som e typ ica l techn iques a re review ed, w ith em p ha sis on gra ting p ro jection p ha se m ea su rem en t m ethod. T heir advan tages and disadvan tages a re discu ssed. Som e cu rren t ho t spo ts and fu tu re direction s a re ana lyzed. Keywords: op tica l p rofilom etry, ligh t p a ttern p ro jection, triangu la tion, p ha se m ea su rem en t, m o iré con tou ring, p ha se 2sh ifting, Fou rier tran sfo rm p rofilom etry, p ha se unw rapp ing.
58
第 5 期 郝煜栋等: 光学投影式三维轮廓测量技术综述
( 9) 现在的莫尔技术一般不再使用真正的光 栅, 而是使用计算机生成的虚拟光栅或者电子
+ c3 ( x , y ) exp ( - 2Π if 0 x )
式中
c (x , y ) =
光栅来实现。 假设参数光栅表示为 I R i ( x , y ) = D co s ( 2Π f 0x - Ω i) 式 ( 1) 与 ( 3) 相乘并略去比例常数可得 I ( x , y ) I R i ( x , y ) = a co s ( 2Π f 0 x - Ωi )
第 5 期 光 学 技 术 N o. 5 1998 年 9 月 O PT ICAL T ECHNOLO GY Sep t. 1998
光学投影式三维轮廓测量技术综述
郝煜栋 赵洋 李达成
Ξ
( 精密测试技术及仪器国家重点实验室, 清华大学精密仪器与机械学系, 北京 100084)
N + 1
tan Υ( x , y ) =
n= 1 N + 1
∑I
n
sin
2n Π N + 1
∑
2n Π I n co s N + 1 n= 1
( 2)
除此之外还有 N 段积分法、 、 N + 1 步法、 Ca rré
图 1 投影式轮廓测量的光路结构
最小二乘法等。 移相法是一种在时间轴上的逐点运算, 因 此低调制点容易分离, 不会造成全面影响。 移相 法的计算量少, 可以用较粗的光栅达到很高的 灵敏度。 另外, 这种方法具有一定抗静态噪声的 能力。 移相法是这些轮廓测量法中最成熟最可 靠的一种, 已经实现了商品化。 虽然精确移动光 栅的需要增加了系统的复杂性, 某些应用场不 允许测量多幅图像, 但只要没有以上限制, 移相 法仍然是首选方案。 ( 3) 空域相位测量技术 空域相位测量技术只用一幅干涉图来解调 相位信息。 这种技术有多种方法, 但它们的本质 是相同的。
一、 引 言 物体的三维轮廓测量在高速在线检测、 质 量控制、 机器 机器人视 觉、 反 求 工 程、 CAD CAM 以及医疗诊断等领域的应用日益重要。 具有非接触特性的光学测量方法由于其高分辨 率、 无破坏、 数据获取速度快等优点而被公认为 最有前途的三维轮廓测量方法。 光学轮廓测量方法的种类很多, 包括普通 光学干涉法、 全息干涉法、 散斑干涉法、 光学探 针显微镜、 共焦显微镜、 激光逐点扫描法、 光切 法、 莫尔等高法、 傅氏变换法、 移相法等等。 在以 上方法中, 逐点扫描法及其后的几种都是以光 学投影为基础的, 主要用于散射物体的宏观轮 廓测量。 本文将要介绍的就是这种光学投影式
Ξ
收稿日期: 1997 年 7 月 21 日; 收到修改稿日期: 1997 年 8 月 25 日
57
光 学 技 术 1998 年 9 月
前者有很大提高, 确定测量点也比较容易, 故应 用比较广, 国际上早有商品出售; 二元编码图像 投影法采用时间或 和空间编码的二维光学图 样投影 ( 一般用液晶屏作为投影装置) , 能够大 大提高测量速度, 是一种很有前途的三角测量 法。 这几种方法的优点是信号的处理简单可靠, 无须复杂的条纹分析就能唯一确定各个测量点 的绝对高度信息, 自动分辨物体凸凹, 即使物体 上的物理间断点 ( 台阶、 孔) 使图样不连续也不 会影响测量。 它们共同的缺点是精度不高, 不能 实现全场测量。 21 相位测量法 相位测量式轮廓测量技术用光栅图样投影 到被测物体表面 ( 光栅投影的典型光路结构如 图 1 所示) , 变形栅像可以解释为相位和振幅均
由于 a ( x , y ) , b ( x , y ) 和 Υ( x , y ) 相对 f 0 变化缓 慢, 因此可以滤出频谱中的 C ( f - f 0 , y ) 成分, 并将其移回原点做反变换得到 c ( x , y ) 。 由式 ( 4) 可知 tan Υ( x , y ) = R e [ c ( x , y ) ] I m [ c (x , y ) ] ( 12) 傅氏变换法相当于在空间频域进行操作的 移相莫尔法。它有几个主要的问题。第一, 计算 量大; 第二, 使用 FFT 会产生泄漏、 混淆和栅栏 效应引起的误差; 第三, 滤出基频分量必须经过 不断地试错才能得到最准确的滤波器参数。 空域相位测量技术的优势在于只用一幅干 涉图来解调相位信息, 不需要专门的移相机构。 但是它对于投影条纹和探测器都提出了更严格 的要求, 即相位变化相对载频变化比较缓慢, 探 测器的分辨率比时域技术所需的要高, 其灵敏 度在整个阵列上均匀分布。 三、 研究热点和发展方向 11 投影方式 虽然研制出一台普遍适用的轮廓仪是不现 实的, 但世界各国的科研人员正努力使光学轮 廓仪具有更高的 “自适应性” 。 自适应性表现为 轮廓仪根据被测物体的几何形状以及测量参数 ( 距离、 范围、 角度) 自动调节其投影—接收系统 的能力, 以及解调算法随时跟上投影图样变化 的能力。 当然, 最根本的问题还是在于投影方式 的自适应性。 在所有的投影方式中, 出现最早、 最简单也 是最常用的投影方式是用幻灯投影仪投影光 栅。 这种方法以及利用泰伯效应投影光栅的方 法是无法实现自适应投影的, 仪器灵活性受到 很大的限制。