三维光学轮廓测量仪综述
三维光学轮廓测量仪综述
三维光学轮廓测量仪是利用光学显微技术、白光干涉扫描技术、计算机软件控制技术和PZT垂直扫描技术对工件进行非接触测量,还原出工件3D表面形貌宏微观信息,并通过软件提供的多种工具对表面形貌进行各种功能参数数据处理,实现对各种工件表面形貌的微纳米测量和分析的光学计量仪器。
三维光学轮廓测量仪典型特点:
1) 使用白光干涉测量技术,非接触式、非破坏性、快速表面形貌测量与分析;
2) 台阶高度测量分辨率达0.1 nm;
3) 可搭配黑白或彩色相机进行2D、3D显示和测量功能;
4) 配置电动鼻轮,可同时挂载多种物镜并程序化控制切换使用;
5) 采用双光源模式,适应特殊样品测量;
6) 测量范围100×100mm(可按客户定制尺寸);
7) 配置低倍率物镜(2.5×和5×倍率),可进行大面积3D测量;
8) 提供多种表面参数测量功能,如断差高度、夹角、面积、体积、粗糙度、波纹度、
薄膜厚度及平面度;
9) 提供超过250多种各类参数(含2D、3D)计算;
10) 友好的人机界面,简便的图形化控制系统及3D图型显示;
11) 多种交换文件格式,可储存与读取多种3D轮廓文件格式;
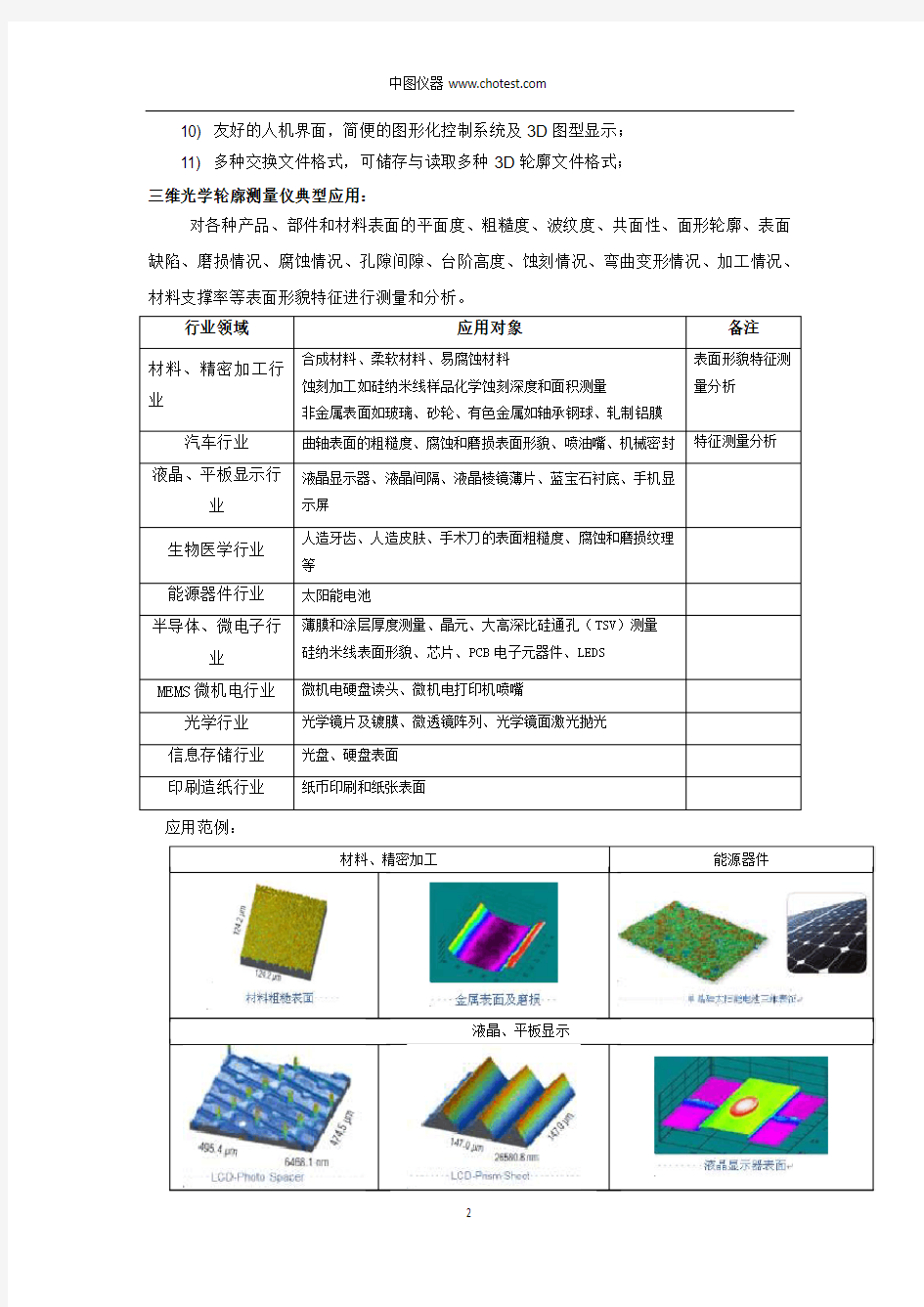
三维光学轮廓测量仪典型应用:
对各种产品、部件和材料表面的平面度、粗糙度、波纹度、共面性、面形轮廓、表面缺陷、磨损情况、腐蚀情况、孔隙间隙、台阶高度、蚀刻情况、弯曲变形情况、加工情况、材料支撑率等表面形貌特征进行测量和分析。
应用范例:
三维光学轮廓测量仪主要技术指标:
轮廓测量仪操作规程
轮廓测量仪操作规程 轮廓测量仪能够对各种工件轮廓进行长度、高度、间距、水平距离、垂直距离、角度、圆弧半径等几何参数测量,并且具有强大的CNC功能,能进行一系列操作自动化,可高效率地进行测量作业。 一.操作步骤 1.测量前准备。 2.开启电脑、打开机器电源开关、检查机器启动是否正常。 3.擦净工件被测表面。 二.测量 1.将测针正确、平稳、可靠地移动在工件被测表而上。 2.工件固定确认工件不会出现松动或者其它因素导致测针与工件相撞的情况出现。 3.在仪器上设置所需的测量条件。 4.开始测量。测量过程中不可触摸工件更不可人为震动桌子的情况产生。
5.测量量完毕,根据图纸对结果进行分析,标出结果,并保存、打印。 三.保养 1.每天开机前及测量完毕后用高织纱棉布沾无水酒精清洁工装表面、测针、轨道。2.平时不使用时将所有电源关闭,且将测针的保护套套上。 3.严禁用扫帚清扫地面,以免灰尘扬起。 4.对仪器进行全面的维护和精度调整。 四.维护 1.测力标定 如图1所示。此界面用于对测针扫描时测量力的设置。 (图1)测力标定界面 测力标定示意图,如图2所示。 (图2)测力标定示意图
注意:请在专业人员的指导下进行测力标定和测杆摆动调整! 下针尖测力设置:如图2所示。 1)把电子称放置在测量位置下方,把电子称清零(注意:电子称开机后自动清零,电子称 显示的单位应为“g”)。 2)控制测针移到电子称上方。 3)软件上先设置“测力大小”(普通工件测力一般为7g),然后点击“设置”按钮,则输 入框变为可编辑状态。 4)点击“向下测力”(绿色标志表示选中),此时测针向下接触电子称。 5)同时在主界面观察Z0光栅值,看摆杆是否处于水平位置(注意:测力标定应在摆杆处 于水平位置时进行操作,摆杆处于水平位置时的Z0光栅值主要由机械安装确定,一般情况下,此时Z0光栅值等于0.000mm,具体参数见“测力标定”界面的提示值),若不处于水平位置,则上下移动Z轴使Z0光栅值等于提示值即可。 6)观察电子称的读数应在7g左右(注意:读数前先轻轻抬起摆杆,再轻轻放下,不能通 过摆杆的重力和张力落下,然后重复3-5次观察电子称读数),若不是7g左右,则应通过调整“向下位置”下方的角度值来调整测力,然后点击“保存”按钮。 7)重复步骤(5),直至测力正常。 2.编码器标定 如图3所示。此界面用于使用激光干涉仪对光栅示值进行标定,非专业人员不允许随意操作。
视觉测量系统技术及应用
视觉测量系统技术及应用 1 引言 基于计算机的视觉检测系统是指通过计算机视觉产品将被摄取目标转换成图像信号,传送给图像处理系统,图像处理系统再根据像素分布和亮度、颜色等信息,转变成数字化信号,计算机图像系统对这些信号进行复杂运算来抽取目标的特征,进而根据判别的结果来控制设备动作。它具有非接触、速度快等优点,是一种先进的检测手段,非常适合现代制造业。可用于视觉检测的试验原理很多,如纹理梯度法、莫尔条纹法、飞行时间法等,然而诸多测试原理中,尤其基于三角法的主动和被动视觉测量原理具有抗干扰能力强、效率高、精度合适等优点,非常适合在线非接触测量。本文主要从视觉测量系统在实际中应用出发,展示视觉检测技术在制造业中的广阔应用[1-4]。 2 视觉测量系统技术的应用 2.1 汽车车身视觉检测系统 在汽车制造过程中,车身上总有很多关键的三维尺寸进行测量,采用传统的三坐标测量机只能离线抽样检测,效率低,更不能满足现代汽车制造在线检测的需要,而视觉检测系统能很好的适应该需要,典型的汽车车身视觉检测系统如图1所示[5]。 图1 车身视觉检测系统 车身检测系统主要依靠的是数个视觉传感器,其中还包括传送机构、定位机构,计算机图像采集、网络控制部分。每个传感器对应一个被测区域,然后通过传输总线传至计算机,通过计算机对每个视觉传感器进行过程控制。 汽车车身检测系统的测量效率很高,精度式中,并且可以在完全自动情况下完成,这个包含几十个测点的系统都能再几分钟内测量完成,因此可以适应汽车制造的在线检测。而且传感器的布置可以根据不同车型来布置,增加了应用要求,
因此减少了车身视觉系统的维护费用。 2.2 拔丝模孔形视觉检测系统 使用计算机视觉检测技术开发出的拔丝模孔形检测系统由光学成像系统、工业用摄像机图像采集卡、计算机及监视器组成,可以解决生产实际中的模具孔形检测问题.工作原理如下:先采用注入硅胶方法获得反映待检拔丝模尺寸及形状的硅胶凸模,然后把硅胶凸模放在光学系统的载物台上.硅胶凸模经光学成像放大,成像于CCD像面上,然后用图像采集卡采集CCD图像信息,最后由计算机视觉检测软件完成对孔形尺寸的自动计算,此时图像采集时需要配置特殊的光照系统.系统实现了自动数据采集、处理,实现采样、进样、结果一条龙,形成检测的自动化. 2.3 无缝钢管直线度和截面在线视觉检测 无缝钢管是一类重要的工业产品,在反应无缝钢管质量中,钢管直线度及截面尺寸是主要的几何参数。现代工业已经可以实现无缝钢管的大批量大规模生产,并且并无成熟的直线度、截面尺寸高效率的检测系统,主要原因为:无缝钢管空间尺寸大,需要很大的测量空间,一般的检测手段很难实现如此大尺度的检测。然而视觉检测却非常适合无缝钢管及截面尺寸的测量,其测量原理图如图2所示。 多个传感器组成了视觉检测系统,传感器的结构光所投射的光平面与被测钢管相交,从而得到钢管的部分圆周,传感器测量圆周在传感器三维空间位置,每一个传感器实现一个截面圆周测测量,然后通过拟合得到截面的圆心和其空间位置,从而实现对无缝钢管截面和直径的测量。 图2 无缝钢管在线检测 2.4 视觉测量在逆向工程中的应用 逆向工程是针对现有的工件,利用3D数字化测量仪准确快速地测量出轮廓坐标值,并建构曲面,经过编辑、修改后,将图形存档形成一般的CAD/CAM系统,再由CAM所产生刀具的NC加工路径送至CNC加工机制所需模具,或者以快速成型将物品模型制作出来。视觉测量一般使用三种激光光源:点结构光、线结构光、面结构光,图3为使用线结构光测量物体表面轮廓的结构示意图[6]。
轮廓测量仪和三坐标测量机的区别
轮廓仪,顾名思义,测量产品表面轮廓尺寸的仪器。随着轮廓仪的迭代更新,现在的轮廓仪是一款对物体的轮廓、二维尺寸、二维位移进行测试与检验的精密设备,在汽车制造和铁路行业的应用十分广泛。 今天小编要为大家分享一下轮廓仪和三坐标测量机区别,希望能够帮助到大家。 1、用途的区别 轮廓仪可测量各种精密机械零件的粗糙度和轮廓形状参数。用拟合法来评定园弧和直线等。从而可测量园弧半径、直线度、凸度、沟心距、倾斜度、垂直距
离、水平距离、台阶等形状参数。仪器还可对各种零件表面的粗糙度进行测试;可对平面、斜面、外园柱面、内孔表面、深槽表面、圆弧面和球面的粗糙度进行测试,并实现多种参数测量。 接触过一款三坐标测量机CMM,是意大利coord3的,对于这种cmm我自己认为有很大缺陷,当然也有优点。它可以测量模具产品,电子类产品,通讯类,汽车类等等很多。在一个工厂它的用途确实很广泛,但它的价格却也不菲。 2、结构的区别 轮廓仪由花岗岩平板、工作台、传感器、驱动箱、显示器、电脑和打印机等部分组成.测量时可选定被测零件的不同位置,设定各种测量长度进行自动测量,评定段内采样数据达数万个点。并可显示或打印轮廓形状及其尺寸,各种粗糙度参数及轮廓的支承长度率曲线等。 三坐标主要有机械系统,测头系统,电气控制硬件系统,数据处理软件系统组成。 以上就是深视智能小编对轮廓仪和三坐标测量机区别的分享内容,希望能够帮到有需要的朋友,深圳市深视智能科技有限公司重点针对机器视觉领域的三维
视觉系统产品线投入研发,推出激光轮廓仪,轮廓仪,激光轮廓传感器,激光轮廓扫描仪,激光轮廓测量仪,3D线扫相机,线扫描相机,3d激光测量仪,线激光扫描仪,3D激光扫描仪等产品,广泛应用于各大检测行业,欢迎来电咨询。
视觉检测基础知识
视觉检测的基础知识
内容概略: 一、光源 二、镜头 三、相机 四、分辨率、精度、公差间的关系
视觉检测的基础知识(一)光源 觉检测硬件构成的基本部分和光源相关的最重要的两个参数就是光源颜色和光源形状。2016-7A p o l工业机器视觉系统的前沿应用视 一、什么是颜色? 颜色是通过眼、脑和我们的生活经验所产生的一种对光的视觉效应,我们肉眼所见到的光线,是由波长范围很窄的电磁波产生的,不同波长的电磁波表现为不同的颜色,对色彩的辨认是肉眼受到电磁波辐射能刺激后所引起的一种视觉神经的感觉。颜色具有三个特性,即色相,饱和度和明亮度。 ▼简单讲就是光线照到物体,反射到眼中的部分被大脑感知,引起的一种感觉。通过色相Hue,,饱和度Saturation和明亮度Value来表示,即我们常说的HSV。当然,颜色有不止一种表示方法,RGB三原色也是另外一种表示方法。但是对人类最直观感受的方式是HSV。 二,什么是HSV? 色相Hue ▼如果将色彩分类,可分为含有颜色的有彩色与不含颜色的无彩色(黑、白、灰)两种。在有彩色中,红、蓝、黄等颜色的种类即称为“色相(Hue)”。
▼作为主要色相有红、黄、绿、蓝、紫。以这些色相为中心,按照颜色的光谱将颜色排列成环状的图形我们称之为“色相环”。使用此色相环我们即可求得中间色与补色。 饱和度Saturation ▼饱和度(Saturation)是指颜色的鲜艳度,表示色相的强弱。颜色较深鲜艳的色彩表示“饱和度较高”,相反颜色较浅发暗的色彩表示“饱和度较低”。饱和度最高的颜色称为“纯色”,饱和度最低的颜色(完全没有鲜艳度可言的颜色)即为无彩色。 明亮度Value ▼明亮度(Value)表示颜色的明暗程度。无论有彩色还是无彩色都具有明亮度。明亮的颜色表示“明亮度较高”,相反暗的颜色表示“明亮度较低”。无论有彩色还是无彩色,明亮度最高的颜色即为白色,明亮度最低的颜色即为黑色。也就是说,有彩色的明亮度可用与该亮度对应的无彩色的程度进行表示。
光学三维测量技术综述精选文档
光学三维测量技术综述 精选文档 TTMS system office room 【TTMS16H-TTMS2A-TTMS8Q8-
光学三维测量技术综述 1.引言 客观景物三维信息的获取是计算机辅助设计、三维重建以及三维成像技术中的基础环节,被测物体的三维信息的快速、准确的获得在虚拟现实、逆向工 程、生物与医学工程等领域有着广泛的应用[1]。 三维测量方法总的包括两大类,接触式以及非接触式。如图所示。 图三维测量方法分类 接触式的三维测量方法到目前为止已经发展了很长一段时间,这方面的技术理论已经非常完善和成熟,所以,在实际的测量中会有比较高的准确性。但 是尽管如此,依然会有一些缺点[2]: (1) 在测量过程中,接触式测量必须要接触被测物体,这就很容易造成被测物体表面的划伤。 (2) 接触式测量设备在经过长时间的使用之后,测量头有时会出现形变现象,这无疑会对整个测量结果造成影响。 (3) 接触式测量要依靠测量头遍历被测物体上所有的点,可见,其测量效率还是相当低的。 接触式三维测量技术发展已久,应用最广泛的莫过于三坐标测量机。该方法基于精密机械,并结合了当前一些比较先进技术,如光学、计算机等。并且该方法现在已经得到了广泛的应用,特别是在一些复杂物体的轮廓、尺寸等信息的精确测量上。在测量过程中,三坐标测量机的测量头在世界坐标系的三个坐标轴上都可以移动,而且测量头可以到达被测物体上的任意一个位置上,只要测量头能到达该位置,测量机就可以得到该位置的坐标,而且可以达到微米级的测量精度。但由于三坐标机测量系统成本较高,加之上述的一些缺点,广泛应用还不太现实。
非接触式三维测量技术一般通过利用磁学、光学、声学等学科中的物理量测量物体表面点坐标位置。核磁共振法、工业计算机断层扫描法、超声波数字化法等非光学的非接触式三维测量方法也都可以测量物体的内部及外部结构的表面信息,且不需要破坏被测物体,但是这种测量方法的精度不高。而光学三维轮廓测量由于其非接触性、高精度与高分辨率,在CAD /CAE、反求工程、在线检测与质量保证、多媒体技术、医疗诊断、机器视觉等领域得到日益广泛的 应用,被公认是最有前途的三维轮廓测量方法[3]。由于光不能深入物体内部,所 以光学三维测量只能测量物体表面轮廓,因此,本文中所言光学三维测量即指光学三维轮廓测量,此后不再单独解释。 光学三维测量技术总体而言可以分为主动式光学三维测量和被动式光学三维测量,根据具体的原理又可以分为双目立体视觉测量法、离焦测量法、飞行时间法、激光三角法、莫尔轮廓术和结构光编码法等。下面就刚刚提到的几种光学三维测量技术的原理进行逐一讲解。 2.测量原理 被动式光学三维测量 双目立体视觉测量法 双目成像采用视觉原理来获得同一场景的2幅不同图像。通过对物体上同一点在2幅图像上的2个像点的匹配和检测,可以得到该点的坐标信息。测量原理如图所示。设摄像机基线长为B,视差定义为D= P1- P2,其中P1、P2为空间点W(X,Y,Z)在2像面上的投影点,则由几何关系可得Z=Bf/ D。计算出物点的深度坐标后,其它2个坐标可以通过简单的几何透视关系得出。双目视觉成像原理简单,但由于需要在两幅图像中寻找对定点的匹配,实际计算过程较为复杂。 图双目立体视觉法三维测量原理图
轮廓测量仪原理及应用
轮廓测量仪概述 SJ5700轮廓测量仪是一款集成表面粗糙度和轮廓测量的测量仪器;采用进口高精度光栅测量系统、高精度研磨导轨、高性能非接触直线电机、音圈电机测力系统、高性能计算机控制系统技术,实现对各种工件表面粗糙度和轮廓进行测量和分析。通过高精度研磨导轨、高性能直线电机保证测量的高稳定性及直线度,采用进口高精度光栅测量系统建立工件表面轮廓的二维坐标,计算机通过修正算法对光栅数据进行修正,最终还原出工件轮廓信息并以曲线图显示出来,通过软件提供的分析工具可对轮廓进行各种参数分析。 轮廓仪为全自动测量设备,操作者只需装好被测工件,在检定软件上设定扫描的开始、结束位置,点击“开始”按钮,测针会自动接 触工件表面,并按设定的位置扫描;可高精度地测量精密加工零部件的粗糙度和轮廓形状,再选择所需评价参数即可进行评价。 系统软件为简体中文操作系统,操作方便。
轮廓测量仪功能 SJ5700 轮廓测量仪可测量各种精密机械零件的素线轮廓形状参数,角度处理(坐标角度,与 Y 坐标的夹角,两直线夹角)、圆处理(圆弧半径,圆心到圆心距离,圆心到直线的距离,交点到圆心的距离,直线到切点的距离)、点线处理(两直线交点,交点到直线距离,交点与交点距离,交点到圆心的距离)、直线度、凸度、对数曲线、槽
深、槽宽、沟曲率半径、沟边距、沟心距、轮廓度、水平距离等形状参数。 轮廓测量仪性能特点 1、高精度、高稳定性、高重复性:完全满足被测件测量精度 要求。 1) 选用国际领先的高精度光栅测量系统和高精度电感测量系 统,测量精度高; 2) 自主研发高精度研磨导轨系统,导轨材料耐磨性好、保证 系统稳定可靠工作; 3) 高性能直线电机驱动系统,保证测量稳定性高、重复性好; 2、智能化管理与检测软件系统: 仪器操作界面友好,操作者很容易即可基本掌握仪器操作,使用十分简便。 1) 10多年积累的实用检定软件设计经验,向客户提供简洁、 实用、快速的操作体验; 2) 功能强大、自动处理数据、打印各种格式的检定报告,自 动显示、打印、保存、查询测量记录; 3) 测量围广,可满足绝大多数类型的工件粗糙度轮廓测量; 4) 可自动和手动选取被测段进行评定,可依据客户要求进行 软件功能的定制; 5) 纯中文操作软件系统,更好的为国用户服务; 6) 打印格式正规、美观。检定数据可存档,或集中打印,不 占用检定操作时间;
镜面反射物体光学三维测量技术研究
中腰分类号:TN247密缀:单悦代号:lL903 々e:02720464 上海大学@/;lit硕士学位论文SHANGHAlUNIVERSlTY MASTER’STHESIS 题{镜面反射物体光学三维测 日量技术研究 作看陶蓬 学科专业精密仪器及机械 导师竖堑里 完成日期2005.06
第一章:概述 1.1课题的研究意义 “镜面反射物体光学三维测量技术研究(Research()nOpticalThree—dimensionalMeasurementTechniqueforSpecularObjects)”试图以光学方岳为手段,实现镜面反射物体(SpecularObjects)三维面形的快速测量与重建。 1970年代以来,光学三维测量技术以其高精度、高效率和非接触性(Non—Contact)的优点,已经在工业及民用领域得到广泛的应用和发展¨12l。首先,在工业领域,光学三维测量技术的作用是为先进制造业服务,担负起保证产品质量和提高生产效率的重任。特别是在航天航空工业、汽车制造业中,其应用可贯穿于从产品开发到制造,以及质量控制的整个生产过程;具体如在cAD/cAM/cAE(计算机辅助设计/制造/工程)中替代接触式测量,用于构建逆向工程(ReverseEngineering)系统,为产品开发和仿真加工制造提供一一种理想的设计手段。其次,在非工业领域亦有广阔的市场空间,比如①在多媒体技术及虚拟现实技术I3I中的应用、②在医疗诊断|4】及人类学I5I中的应用等等。 但是,现有光学三维测量主流技术及其设备主要针对的是漫反射物体(DefusedObjects)的三维测量,而难以有效地测量镜面物体。而在实际应用中,大量被测物体的表面性质为镜面反射。特别是在工业领域,镜面反射物体更是占有较大比重。例如,抛光模具等精加工零部件、某些表面涂镀零件(如喷镀汽车覆盖件)、某些玻璃及塑料制品以及印刷线路板的焊点等,其表 图1-1工业中常见的镜面反射物体 (a)喷镀车身(b)印刷线路板的焊点(c)抛光模具(d)精加T零部件 面性质均为镜面反射。图1.1是工程中常见的镜面反射物体。目前,对于这类零件的三维检测一般采用两种办法: 其一,呆用传统的坐标测量机(CMM)等接触式测量设备,速度很慢; 其二,喷涂其表面,改变其反射特性为漫反射后用光学方法测量【11,这种方法削弱了光学测量方法的非接触优点。 事实上,镜面物体的光学三维测量技术研究已严重滞后于需求的快速增氏,对其研究具有重要的科学技术价值。从实用性的角度,该技术研究来源自22程中的实际需求,其成果必然具有良好的应用前景;从技术角度,其意义在于镜面反射物体的光学三维测量已经成为工程测量领域中一个亟待解决的技术难题,对其开展研究,有助于丰富光学三维测量领域中的知识成果,从而拓宽光学三维测量技术的应用领域。
接触式轮廓测量仪与非接触式轮廓测量仪对比分析
接触式轮廓测量仪与非接触式轮廓测量仪对比分析 前言:目前市场上的轮廓测量仪主要有接触式轮廓测量仪和非接触式轮廓测量仪,本文将从功能、原理、应用三个方面对这两种轮廓测量仪进行对比分析。 功能 1.接触式轮廓测量仪(以中图仪器SJ5700为例)可测量各种精密机械零件的素线轮廓形状参数,角度处理(坐标角度,与Y坐标的夹角,两直线夹角)、圆处理(圆弧半径,圆心到圆心距离,圆心到直线的距离,交点到圆心的距离,直线到切点的距离)、点线处理(两直线交点,交点到直线距离,交点与交点距离,交点到圆心的距离)、直线度、凸度、对数曲线、槽深、槽宽、沟曲率半径、沟边距、沟心距、轮廓度、水平距离等形状参数。 2.非接触式轮廓测量仪(以中图仪器SuperView W1光学3D轮廓仪为例)适用于各类
光滑、连续光滑和适度粗糙物体表面从毫米到亚微米、纳米尺度的3D形貌轮廓、坐标、厚度、粗糙度、体积、表面纹理等测量。 ●工作原理 1.接触式轮廓测量仪测量原理为直角坐标测量法,即通过X轴、Z轴传感器,测绘出被测零件的表面轮廓的坐标点,通过电器组件,将传感器所测量的坐标点数据传输到上位PC 机,软件对所采集的原始坐标数据进行数学运算处理,标注所需的工程测量项目。 2.非接触式轮廓测量仪是利用光学显微技术、白光干涉扫描技术、计算机软件控制技术和PZT垂直扫描技术对工件进行非接触测量,还原出工件3D表面形貌宏微观信息,并通过软件提供的多种工具对表面形貌进行各种功能参数数据处理,实现对各种工件表面形貌的微纳米测量和分析的光学计量仪器。 ●典型应用 1.接触式轮廓测量仪广泛应用于机械加工、汽车、摩托车、精密五金、精密工具、刀具、模具、光学元件等行业。适用于科研院所、大专院校、计量机构和企业计量室。 在汽车、摩托车、制冷行业,可测汽车、摩托车、压缩机的活塞、活塞销、齿轮和气门顶杆的母线参数等.并可测量各种斜形零件的参数。 在轴承行业,可测内外套圈的密封槽形状(角度、倒角R、槽深、槽宽等);各种滚子轴承的滚子和套圈母线的凸度、角度、对数曲线; 电机轴、圆柱销、活塞销、滚针轴承、圆柱滚子轴承、直线轴承的滚动体和套圈的直线度;球轴承沟道的沟曲率半径及沟边距;双沟轴承的沟心距;四点接触轴承(桃形沟)的沟心距和沟曲率半径等。
触针式轮廓测量仪基础知识
触针式轮廓测量仪基础知识 SJ5760触针式轮廓测量仪是机械加工企业和计量检定单位应用针描法测量工件表面轮廓一种常用仪器。 触针式轮廓测量仪功能: ①角度处理:两直线夹角、直线与Y轴夹角、直线与X轴夹角 ②点线处理:两直线交点、交点到直线距离、交点到交点距离、交点到圆心距离、交点到 点距离 ③圆处理:圆心距离、圆心到直线的距离、交点到圆心的距离、直线到切点的距离
触针式轮廓测量仪工作原理: 当驱动器带动传感器沿工件被测表面作匀速运动时,传感器的测针随工件表面的微观起伏作上下运动,测针的运动经传感器转换为电信号的变化,电信号的变化量再经后期电路的处理和计算,得到工件表面轮廓参数。 测针标定: 轮廓测量仪的测针在出厂前已经标定过,后续使用不需要再标定,可以直接测量。若重新购买了新的测针,或使用久了,怀疑测针参数不准,可重新标定。 轮廓测针标定分为量块标定和标准球标定。 量块标定:主要用来标定仪器的系统误差和测针误差。 标准球标定:主要用来标定测针的针尖半径。选用的标准球,直径越小,标定结果越准确。 触针式轮廓测量仪使用说明: 操作步骤 1.测量前准备。 2.开启电脑、打开机器电源开关、检查机器启动是否正常。 3.擦净工件被测表面。 测量 1.将测针正确、平稳、可靠地移动在工件被测表而上。 2.工件固定确认工件不会出现松动或者其它因素导致测针与工件相撞的情况出现。3.在仪器上设置所需的测量条件。 4.开始测量。测量过程中不可触摸工件更不可人为震动桌子的情况产生。 5测量完毕,根据图纸对结果进行分析,标出结果,并保存、打印。 维护和保养 1.每天开机前及测量完毕后用高织纱棉布沾无水酒精清洁工装表面、测针、轨道。2.平时不使用时将所有电源关闭,且将测针的保护套套上。
光学非接触式三维测量技术
光学三维测量技术及应用 摘要:随着现代科学技术的发展,光学三维测量已经在越来越广泛的领域起到了重要作用。本文主要对接触式三维测量和非接触式三维测量进行了介绍。着重介绍了光学三维测量技术的各种实现方法及原理。最后对目前光学三维测量的应用进行了简单介绍。 1 引言 随着科学技术和工业的发展,三维测量技术在自动化生产、质量控制、机器人视觉、反求工程、CAD/CAM以及生物医学工程等方面的应用日益重要。传统的接触式测量技术存在测量时间长、需进行测头半径的补偿、不能测量弹性或脆性材料等局限性,因而不能满足现代工业发展的需要。。 光学测量是光电技术与机械测量结合的高科技。光学测量主要应用在现代工业检测。借用计算机技术,可以实现快速,准确的测量。方便记录,存储,打印,查询等等功能。 光学三维测量技术是集光、机、电和计算机技术于一体的智能化、可视化的高新技术,主要用于对物体空间外形和结构进行扫描,以得到物体的三维轮廓,获得物体表面点的三维空间坐标。随着现代检测技术的进步,特别是随着激光技术、计算机技术以及图像处理技术等高新技术的发展,三维测量技术逐步成为人们的研究重点。光学三维测量技术由于非接触、快速测量、精度高的优点在机械、汽车、航空航天等制造工业及服装、玩具、制鞋等民用工业得到广泛的应用。 2 三维测量技术方法及分类 三维测量技术是获取物体表面各点空间坐标的技术,主要包括接触式和非接触式测量两大类。如图1所示。 图1 三维测量技术分类
2.1 接触式测量 物体三维接触式测量的典型代表是坐标测量机(CMM,Coordinate Measuring Machine)。CMM是一种大型精密的三坐标测量仪器[1],它以精密机械为基础,综合应用电子、计算机、光学和数控等先进技术,能对三维复杂工件的尺寸、形状和相对位置进行高精度的测量。 三坐标测量机作为现代大型精密、综合测量仪器,有其显著的优点,包括:(1)灵活性强,可实现空间坐标点测量,方便地测量各种零件的三维轮廓尺寸及位置参数;(2)测量精度高且可靠;(3)可方便地进行数字运算与程序控制,有很高的智能化程度。 早期的坐标测量机大多使用固定刚性测头,它最为简单,缺点也很多[2]。主要为(1)测量时操作人员凭手的感觉来保证测头与工件的接触压力,这往往因人而异且与读数之间很难定量描述;(2)刚性测头为非反馈型测头,不能用于数控坐标测量机上;(3)必须对测头半径进行三维补偿才能得到真实的实物表面数据。针对上述缺陷,人们陆续开发出各种电感式、电容式反馈型微位移测头,解决了数控坐标测量机自动测量的难题,但测量时测头与被测物之间仍存在一定的接触压力,对柔软物体的测量必然导致测量误差。另外测头半径三维补偿问题依然存在。三维测头的出现可以相对容易地解决测头半径三维补偿的难题,但三维测头仍存在接触压力,对不可触及的表面(如软表面,精密的光滑表面等)无法测量,而且测头的扫描速度受到机械限制,测量效率很低,不适合大范围测量。 2.2 非接触式测量 非接触式测量技术是随着近年来光学和电子元件的广泛应用而发展起来的,其测量基于光学原理,具有高效率、无破坏性、工作距离大等特点,可以对物体进行静态或动态的测量。此类技术应用在产品质量检测和工艺控制中,可大大节约生产成本,缩短产品的研制周期,大大提高产品的质量,因而倍受人们的青睐。随着各种高性能器件如半导体激光器LD、电荷耦合器件CCD、CMOS图像传感器和位置敏感传感器PSD等的出现,新型三维传感器不断出现,其性能也大幅度提高,光学非接触测量技术得到迅猛的发展。 非接触式三维测量不需要与待测物体接触,可以远距离非破坏性地对待测物体进行测量。其中,光学非接触式测量是非接触式测量中主要采用的方法。 3 光学非接触式三维测量的概述 光学非接触式三维测量技术根据获取三维信息的基本方法可分为两大类:被动式与主动式。如图2所示[3]。 主动式是利用特殊的受控光源(称为主动光源)照射被测物,根据主动光源的已知结构信息(几何的、物体的、光学的)获取景物的三维信息。被动式是在自然光(包括室内可控照明光)条件下,通过摄像机等光学传感器摄取的二维灰度图像获取物体的三维信息。
测量基础知识
控制测量 控制网具有控制全局,限制测量误差累积的作用,是各项测量工作的依据。对于地形测图,等级控制是扩展图根控制的基础,以保证所测地形图能互相拼接成为一个整体。对于工程测量,常需布设专用控制网,作为施工放样和变形观测的依据。 在一定区域内,为大地测量、摄影测量、地形测量和工程测量建立控制网所进行的测量。 包括:①平面控制测量,是为测定控制点平面坐标而进行的;②高程控制测量,为测定控制点高程而进行的;③三维控制测量,为同时测定控制点平面坐标和高程或空间三维坐标而进行的。 在测区内,按测量任务所要求的精度,测定一系列控制点的平面位置和高程,建立起测量控制网,作为各种测量的基础,这种测量工作称为控制测量。 在一定的区域内为地形测图或工程测量建立控制网(区域控制网)所进行的测量工作。分为平面控制测量和高程控制测量。平面控制网与高程控制网一般分别单独布设,也可以布设成三维控制网。 控制测量的基准面是大地水准面,与其垂直的铅锤线是外业的基准线。 大地水准面:由于海洋占全球面积的71%,故设想与平均海水面相重合,不受潮汐、风浪及大气压变化影响,并延伸到大陆下面处处与铅垂线相垂直的水准面称为大地水准面,它是一个没有褶皱、无棱角的连续封闭面。 平面控制网 常用三角测量、导线测量、三边测量和边角测量等方法建立。 三角测量 三角测量是建立平面控制网的基本方法之一。但三角网(锁)要求每点与较多的邻点相互通视,在隐蔽地区常需建造较高的觇标。
导线测量 导线测量布设简单,每点仅需与前后两点通视,选点方便,特别是在隐蔽地区和建筑物多而通视困难的城市,应用起来方便灵活。随着电磁波测距仪的发展,导线测量的应用日益广泛。 三边测量 三边测量要求丈量网中所有的边长。应用电磁波测距仪测定边长后即可进行解算。此法检核条件少,推算方位角的精度较低。 边角测量 边角测量法既观测控制网的角度,又测量边长。测角有利于控制方向误差,测边有利于控制长度误差。边角共测可充分发挥两者的优点,提高点位精度。在工程测量中,不一定观测网中所有的角度和边长,可以在测角网的基础上加测部分边长,或在测边网的基础上加测部分角度,以达到所需要的精度。 小三角测量是在小测区建立平面控制网的一种方法,它多用于小测区的首级平面控制或三、四等三角网以下的加密,作为扩展直接用于地形测图的图根控制网(点)的基础。此外,交会定点法也是加密平面控制点的一种方法。在2个以上已知点上对待定点观测水平角,而求出待定点平面位置的,称为前方交会法;在待定点对3个以上已知点观测水平角,而求出待定点平面位置的,称为后方交会法。 区域控制网同国家控制网相比较,前者控制面积较小,控制点的密度大,点位绝对误差较小,精度较高。对于区域性平面控制网,根据测区面积、发展远景、因地制宜、经济合理的原则,在保证控制点的必要精度和密度的情况下,可以一次全面布网,也可以分级布网。分级布网通常先布设大范围的首级网,再分阶段进行低级控制点的加密。分级布网可以采用同一种测量方法,也可以采用不同的测量方法。设计时,应进行精度估算,测图控制网要求全网的精度相对比较均匀。工程测量专用控制网,有时需在大范围控制网内部建立较高精度的局部控制网。 区域控制网一般在国家控制网下加密,或以国家控制网为起算数据,以便统一坐标系统。若测区内无已知控制点可以利用时,可在网中任选一点用天文测量方法观测其经纬度,换算成高斯-克吕格尔直角坐标,作为起算坐标。又观测该点至另一点的天文方位角,将其换算成坐标方位角,作为起算方位角。在个别情况下,小测区也可采用假定坐标和磁北定向。三角网所需的起始边长可用测距仪器直接测出。
光学三维形貌测量技术的分析和应用
-72-科技论坛 1概述 非接触光学投影式三维形貌测量技术是 获取物体表面形态特征的一种重要手段,是一 种逆向工程技术,亦称为反求工程(Reverse En- gineering),简称RE [1]。由于这种三维形貌测量技 术具有速度快、分辨率高和非接触等优点而广 泛应用于工程设计、质量控制、医疗诊断和计算 机辅助制造等方面[2]。本文以相位测量轮廓术中 的光栅投影法为重点,介绍了其测量基本原理、 组成以及应用,研究了正弦光栅投影技术和数 字图像处理技术,并利用德国GOM 公司生产 的Advanced TOpometric Sensor 系列(简称 ATOS )流动式光学扫描仪是对鼠标进行了测量 与分析。实验表明:三维光学形貌测量技术简单 实用、测量精度高、便于实现自动测量,是一种 较为理想的光学测量方法。 2相位测量轮廓术的基本原理 相位测量轮廓术的基本原理如图1所示。 D 点为投射系统出瞳中心,DO 为投影光轴。C 点为成像系统入瞳中心,CO 为探测光轴,设 DC=d 且与xoy 参考面平行。从D 点对E 点投 影位置本该落到B 点,但由于物体表面形状调 制的原因,在CCD 镜头上则成像于A 点。设 AB=S R (x ,y),表示偏移量,则E 点的高度为 可见只要计算出偏移量,就能得到被测物体表面各点的高度,实现三维轮廓测量,具体计算是采用相移技术。将正弦光栅投影到待测物体表面上,并规定坐标原点O 处系统相位为零,采用四步相移技术,每步,利用 CCD 摄像机分别获得四幅畸变光栅条纹的光强,利用光强关系计算得到E 点相位。再利用光栅直接投影在参考面上的光强关系计算得到A 点相位[3],它们相位差为若被测物高度远小于L ,则E 点高度,将其代入(2)式则有其中,是可通过对测量系统标定来确定的系数,进而根据相位差可得物体高度。3ATOS 流动式光学扫描仪原理ATOS 系列流动式光学扫描仪是目前国际市场上比较先进的三维扫描设备,该设备采用光栅投影相位测量轮廓技术。其测量系统主要由光学扫描仪和计算机等组成。ATOS 光学扫描仪由两个高分辨率CCD 数码相机和光栅投影仪组成。采用双CCD 的设计目的是实时监测扫描过程中由于振动和环境光线变化对测量精度造成的影响,从而确保扫描精度。由于采用流动式设计和不同视角点云的自动拼合技术,务须移动光学扫描仪,其扫描范围可从10mm 到12m 。不同视角的测量数据依靠粘贴在工件表面上公共的参考点,可自动拼合在统一坐标系内,从而获得完整的扫描数据,对于被参考点覆盖而在工件表面留下的空洞,软件可根据周围点云的曲率变化进行插补[4]。光栅投影仪由光栅和微型步进电机组成。采用不同频率 的光栅分别对同一样品进行组合测量,再将测量得到的图像进行合成方法,可以大大提高检测的分辨率和精度。在ATOS 的光栅投影仪内封装的三组频率不同正弦光栅,刻划在同一玻璃基上,如图2所示。通过微型步进电机可随意切换这三组光栅,进行组合测量。4ATOS 的应用ATOS 系统的软件和硬件均采用模块化设 计,性能稳定,设备操作简单。图3是光栅在鼠标 上的投影,光栅条纹具有较大的光强,良好的景深,具有连续的强度分布及较好的正弦性。由于受鼠标表面形状变化的调制,基准光栅条纹在鼠标表面上产生了畸变,这些畸变条纹就包含了鼠标表面形状的三维信息。利用CCD 摄像机读取畸变条纹,并对图像进行相应的处理,可以得到有关条纹中心线的二维信息,然后根据相应的数学转换模型和重构算法对鼠标轮廓进行重构,得到被测鼠标表面的三维外形数据信息。图4是在鼠标上的投影条纹光强分布图,可以看出是典型的正弦分布。5总结 本文主要分析了基于相位测量的光栅投影 三维轮廓测量系统的基本原理,并以ATOS 流动式光学扫描仪为例详细介绍了光栅投影三维轮廓系统的正弦光栅投影技术和数字图像处理技术。并利用该设备对实际物体三维面形进行了测量,可以看出相位测量轮廓术具有结构简单、速度快,实用,测量精度高、测量范围大、抗干扰性强和可 在线实时测量等优点,是一种较为理想的光学测量方法。 参考文献 [1]V.Srinivasan,H.C.Liu,Maurice Halioua.Automated phase -measuring profilometry:a phase mapping approach.Applied Optics,1985,24(2):185-188.[2]潘伟,赵毅,阮雪榆.相移法在光栅投影测量中的 应用[J].应用光学,2003,24(4):46-49. [3]康新,何小元.基于正弦条纹投影的三维传感及 其去包裹处理[J].光学学报,2001,22(12):1444-1447. [4]任丹,吴禄慎.三维面形位相测量轮廓术的研究[J].南昌大学学报(工科版),2002,3(3):9-12.作者简介:姜洪喜(1976~),男,黑龙江齐齐哈尔人,讲师,硕士,主要从事3D 物体形貌测量和光学梳状滤波器的研究。基金项目:黑龙江省教育厅科学技术研究项目:(编号11531330);黑龙江省高等教育学会“十一五”规划课题:(编号H115-C729);黑龙江科技学院青年基金项目:(编号07-16)光学三维形貌测量技术的分析和应用 姜洪喜任常愚李海宝任敦亮刘炳胜 (黑龙江科技学院,黑龙江哈尔滨150027) 摘要:介绍了光栅投影三维光学测量系统的原理、组成及应用。光栅投影法是将正弦光栅投影到被测物体表面上,由高精度CCD 摄像机摄取这些畸变条纹,并利用数字处理技术获得物体表面三维数据。该方法测量精度高、便于实现自动测量,是一种较为理想的光学测量方法。 关键词:三维形貌测量技术;光栅扫描;ATOS 系统 (1) (2) ,áS x y ,z x y 2 2,á??fS x y áááá ???????á(3) ,2L z x y k d f áá???á
测量投影仪使用原理与结构介绍
数字式测量投影仪又名光学投影仪、轮廓投影仪,是一种光、机、电、计算器一体化的精密高效光学测量仪器,适用于精密工 业二维尺寸测量。本仪器能高效地检测各种形状复杂工件的轮廓和表面形状,如样板、冲压件、凸轮、螺纹、齿轮、成形锉刀、丝攻等各种刀具、工具和零件等,被广泛地应用于机械、仪表、电子、轻工业等行业,院校、研究所以及计量部门的计量室、试验 室和生产车间。 测量投影仪分类: 测量投影仪品类繁多,商业名称和俗称五花八门,按成像分为成像区分:正像和反像;反像是利用投影仪光学成像原理,工件 与图像成反向;正像是通过对投影仪的认知对其加一个棱镜将其成像改为正像,工件与图像同步。常用的为反像,为方便测量,有 时特意加上正像系统把反像变成正像,但这无疑会增加成本而且测量精度也会随之有所降低。因此,若无绝对必需,选择反像是正 确的选择。 就投影方式而言测量投影仪只有两类:即立式测量投影仪、卧式测量投影仪两种。 立式测量投影仪卧式测量投影仪
测量投影仪使用原理: 被测工件置于工作台上,在透射或反射照明下,它由物镜成放大实像(倒像)并经 2 个反光镜反射于投影屏的磨沙面上。当反 光镜换成正像系统后,即成为正像,一个与工作完全同向的影像,观察很直观,给使用者带来极大的方便。 a. 立式测量投影仪:这类投影仪的主光轴平行于影屏平面,多数投影仪均属此类,它们最适合测量平面型零件或体积较小的工件。 立式轮廓投影仪仪器工作原理如下图 1 所示,被测工件Y 置于工作台上,在透射或反射光照明下,它由物镜0 成放大实像Y’并经反射镜M反射于投影屏P 的磨砂面上。 P Y' M M 2 S 2 S Y 1 K 1 S 1 C 图1 在投影屏上可用标准玻璃工作尺对Y’进行测量,也可以用预先绘制好的标准放大图对它进行比较测量,测得数值除以物镜 的放大倍数即工件的测量尺寸。还可以利用工作台上的数字测量系统对工件Y 进行坐标测量:也可以利用投影屏旋转角度数数显系 统对工件的角度进行测量。 图中S1 为透射照明光源,2-S2 为用于反射照明的二支光导纤维(VP系列立式投影仪为 3.2V/10W 透射LDE灯照片组),K1为透射聚光镜,C1 为球面反射镜。视工件的性质,两种照明可分别使用,也可以同时使用。 b. 卧式测量投影仪:这类投影仪的主光轴垂直于投影屏平面,中型和大型投影仪多属此类,它们最适合测量轴类零件或体积较大的 重型工件。 仪器工作原理如下图 2 所示,被测工件Y 置于工作台上,在透射或反射光照明下,它由物镜0 成放大实像Y’并经反射镜M反射于投影屏P 的磨砂面上。 P Y' M S2 M C1 S1 K1 Y 0
光学三维测量技术综述
光学三维测量技术综述 1.引言 客观景物三维信息的获取是计算机辅助设计、三维重建以及三维成像技术中的基础环节,被测物体的三维信息的快速、准确的获得在虚拟现实、逆向工程、 生物与医学工程等领域有着广泛的应用[1]。 三维测量方法总的包括两大类,接触式以及非接触式。如图 1.1 所示。 图1.1 三维测量方法分类 接触式的三维测量方法到目前为止已经发展了很长一段时间,这方面的技术理论已经非常完善和成熟,所以,在实际的测量中会有比较高的准确性。但是尽 管如此,依然会有一些缺点[2]: (1) 在测量过程中,接触式测量必须要接触被测物体,这就很容易造成被测物体表面的划伤。 (2) 接触式测量设备在经过长时间的使用之后,测量头有时会出现形变现象,这无疑会对整个测量结果造成影响。 (3) 接触式测量要依靠测量头遍历被测物体上所有的点,可见,其测量效率还是相当低的。 接触式三维测量技术发展已久,应用最广泛的莫过于三坐标测量机。该方法基于精密机械,并结合了当前一些比较先进技术,如光学、计算机等。并且该方法现在已经得到了广泛的应用,特别是在一些复杂物体的轮廓、尺寸等信息的精确测量上。在测量过程中,三坐标测量机的测量头在世界坐标系的三个坐标轴上都可以移动,而且测量头可以到达被测物体上的任意一个位置上,只要测量头能到达该位置,测量机就可以得到该位置的坐标,而且可以达到微米级的测量精度。但由于三坐标机测量系统成本较高,加之上述的一些缺点,广泛应用还不太现实。 非接触式三维测量技术一般通过利用磁学、光学、声学等学科中的物理量测量物体表面点坐标位置。核磁共振法、工业计算机断层扫描法、超声波数字化法
轮廓测量仪基础知识
轮廓测量仪功能 SJ5700轮廓测量仪可测量各种精密机械零件的粗糙度和轮廓形状参数。用拟合法来评定圆弧和直线等。从而可测量圆弧半径、直线度、凸度、沟心距、倾斜度、垂直距离、水平距离、台阶等形状参数。该仪器还可对各种零件表面的粗糙度进行测试;可对平面、斜面、外圆柱面、内孔表面、深槽表面、圆弧面和球面的粗糙度进行测试,并实现多种参数测量。 轮廓测量仪结构
轮廓测量仪工作原理 SJ5700轮廓测量仪是一种两坐标测量仪器,仪器传感器相对被测工件表而作匀速滑行,传感器的触针感受到被测表而的几何变化,在X和Z方向分别采样,并转换成电信号,该电信号经放大和处理,再转换成数字信号储存在计算机系统的存储器中,计算机对原始表而轮廓进行数字滤波,分离掉表而粗糙度成分后再进行计算,测量结果为计算出的符介某种曲线的实际值及其离基准点的坐标,或放大的实际轮廓曲线,测量结果通过显示器输出,也可由打印机输出。
轮廓测量仪性能特点 1、高精度、高稳定性、高重复性:完全满足被测件测量精度 要求。 1)选用国际领先的高精度光栅测量系统和高精度电感测量系 统,测量精度高; 2)自主研发高精度研磨导轨系统,导轨材料耐磨性好、保证 系统稳定可靠工作;
3)高性能直线电机驱动系统,保证测量稳定性高、重复性好; 2、智能化管理与检测软件系统: 仪器操作界面友好,操作者很容易即可基本掌握仪器操作,使用十分简便。 1) 10多年积累的实用检定软件设计经验,向客户提供简洁、 实用、快速的操作体验; 2) 功能强大、自动处理数据、打印各种格式的检定报告,自 动显示、打印、保存、查询测量记录; 3) 测量范围广,可满足绝大多数类型的工件粗糙度轮廓测量; 4) 可自动和手动选取被测段进行评定,可依据客户要求进行 软件功能的定制; 5) 纯中文操作软件系统,更好的为国内用户服务; 6) 打印格式正规、美观。检定数据可存档,或集中打印,不 占用检定操作时间; 7) 本仪器采用计算机大容量数据库储存,可自动记录保存所 有检定结果。 3、可进行多参数测量 粗糙度自动评价,包括Ra,,Rz,Rp,Rt等 4、测量力系统: 采用音圈电机测力系统,测力可实现从10~150mN连续可调,测力分辨力可达0.2mN;避免了老式砝码加载因周围环境振动带来的测力误差,降低了测力变化引起的测量误差。 5、智能保护系统:
光学三维轮廓测量技术进展
第 35卷第 3期激光与红外 Vol . 35, No . 3 2005年 3月 LASER & I N FRARE D March, 2005 ?综述与评论? 文章编号 :100125078(2005 0320143205 光学三维轮廓测量技术进展 李永怀 , 冯其波 (北京交通大学理学院 , 北京 100044摘要 :, , , , 摄影法 , , 。 关键词 :; :A Overvi ew of Opti cal 3D Profile M easure ment L I Yong 2huai, FENG Q i 2bo (School of Science, Beijing J iaot ong University, Beijing 100044, China Abstract:An overvie w of s ome main op tical methods are p r ovided on 3D shape measure ment, that is ti m e 2of 2flight, structured light, phase measurement, interfer ometry and phot ogra mmetry . Advantages and li m itati ons are discussed, their current research focus and pers pective trend are p resented . Key words:3D measure ment; op tical method; overvie w 1引言 光学三维轮廓测量由于其非接触性、高精度与高分辨率 , 在 CAD /CAE、反求工程、在线检测与质量保证、多媒体技术、医疗诊断、机器视觉等领域得到日益广泛的应用 , 被公认是最有前途的三维轮廓测量方法。