基于PID控制的数字恒流源报告
数控恒流源实验报告设计

数控恒流源实验报告设计摘要:本系统是以msp430单片机为控制器,由矩阵键盘、液晶显示器、D/A转换电路、恒流源电路、电流采样电路及直流稳压电源电路组成的数控恒流源实验电路。
该电流源具有输出电流稳定、可调范围输出电流与输入电压呈线性关系的特点。
系统基本工作原理为:键盘设定直流电源的输出电流,单片机通过D/A转换电路控制恒流源的输入电压,由于恒流源输入电压与负载电流的线性关系且负载电流只随输入电压变化而变化从而实现数控恒流的目的,另外单片机通过电流采样电路及A/D转换回检负载电流并通过液晶将采样电流值显示出来。
最后经实验验证,本系统输出电流稳定,不随负载变化而变化。
关键字:键盘、D/A、恒流源、采样电路、A/D一、方案论证与比较1.1直流稳压电源方案一:采用单极开关电源,由220V交流整理后,经开关电源稳压输出。
该方案的优点是电路效率高,但是此方案产生的直流纹波和干扰比较大,而且开关电源结构复杂。
方案二:采用交流电压经桥式电路整流滤波输出,直接进入稳压电路。
此方案的优点是电路简单、容易实现、方便调试,只是该方案功率损耗较大,但是在小型非连续工作系统中这些功耗可以承受。
综合考虑,选择方案二。
1.2恒流源模块方案一:由运算放大器、大功率场效应管、采样电阻、负载电阻等组成恒流源。
此方案既能满足输出电流达到2A的要求,也能较好地实现电压近似线性控制电流。
方案二:可通过由集成稳压器构成开关恒流源来构成恒流电路。
通过三端集成稳压器可构成开关稳压源。
当把电阻设为一定值时,当回路中负载发生变化时可有集成稳压器进行自动补偿从而使输出电流保持不变,但此电路带负载能力及调节精度存在一定难度。
综合考虑,本系统采用了方案一。
集成稳压器构成的开关恒流源电路图如下:二、系统设计2.1系统方案设计本系统以直流电流源为核心,msp430单片机为控制器,通过矩阵键盘来设置直流电源的输出电流,由单片机程控输出数字信号,经过D/A转换模块输出模拟量,控制直流电流源的输入电压,随着输入电压的变化而输出不同的电流,设置步进等级可达1mA。
采用PID控制的LED恒流源设计

显示电路
工
电压电流采样电路 主控芯片
c8051fD20
丁
ቤተ መጻሕፍቲ ባይዱ
(2) 降压主电路 降压主电路如图3 所示。在
N B u c k 电路中, 采用
图 1
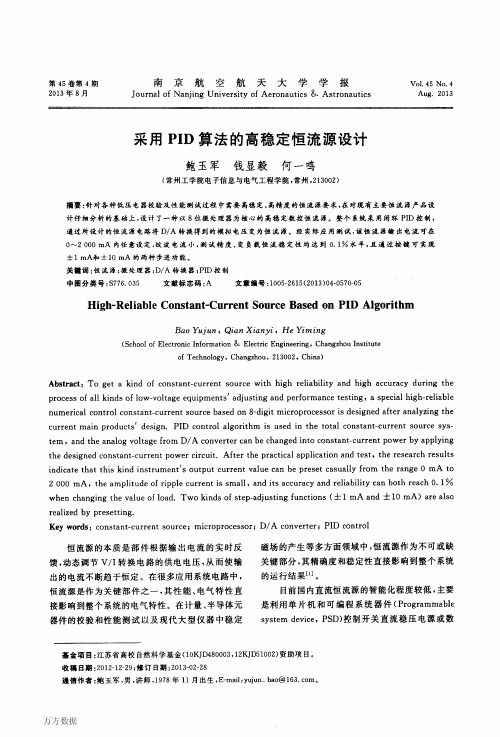
LED 恒 流 驱 动 电 源 总 体 结 构 框 图
沟 道 IF R 640N 作 为 开 关 管 ,电 感 量 为 220 u H , 开
module uses the contact voltage regulator and perform re c tifie r , filte r and voltage s ta b ility fo r the o u tp u t ; B uck c irc u it adopts low resistance and ra p id response tim e M O SFE T ; CPU determ ines the constant voltage mode and constant cu rre n t mode according to the sam pling cu rre n t and changes the output pulse duty ra tio ,w h ic h adopts P ID C o n tro l , and makes the LE D d rive power supply in constant voltage or constant cu rre n t . Results show that the system cu rre n t is o f h igh p re cisio n , sm all rip p le voltage , stable ru n n in g and high e ffic ie n c y . Key words:B U C K c ir c u it 曰 Constant -C u rre n t C o n tro l; P ID S ource ; c 8051f 020 c o n tro lle r; P W M duty ra tio ; P ID A lg o rith m C o n tro l 曰 The LE D Constant C urrent
基于微处理器的单神经元PID交流恒流源装置

关键词 :单神经元 PID ;微处理器 ;交流恒流源 ;快速响应 ;不对称规则法 ;正弦脉宽调制
中图分类号 :TP23
文献标识码 :A
文章编号 :2095-1302(2019)08-0040-03
0引言
交流恒流源是在外界电网电源产生波动或者用电负荷阻 抗的特性发生变化时,仍能使输出的电流保持恒定的交流电 源装置 [1]。目前的交流恒流源大多使用传统的 PID 控制而达 到恒流的目的 [2-4],传统 PID 无法适应所有负载类型与容量 情况,即参数整定的结果只能适合单种负载或者固定电流等 级情况 [5]。因此,本文设计并实现了一种可以自学习而改变 PID 三个参数的单神经元 PID 交流恒流源,使其能够稳定一 定区间范围内的任意电流值,并且能够适应负载的改变而做 出自适应调整。
不对称规则采样法是以三角波的顶点和底点位置与正弦 波的交点作为采样点,根据采样点值的大小来形成阶梯波, 而该阶梯波的脉冲宽度在一个三角波的周期范围内,其位置 不对称,因此把此种方式叫作不对称规则采样 [12]。不对称采 样相比对称采样,其形成的阶梯波更接近于正弦波时的效果。 实验结果表明,使用不对称规则采样法在保证载波比等于 3 或者 3 的倍数时,逆变器的输出电压不存在偶次谐波分量, 并且其他的高次谐波分量的幅值也较小,性能较对称规则采 样有一定的提升。
(2) (3) (4)
z(k) = e(k)
(5)
x1(k) = e(k)
(6)
x2 (k) = e(k) − e(k −1)
(7)
x3(k) = ∆2e(k) = e(k) − 2e(k −1)
(8)
η 为学习速率,η 范围在 0 ~ 1 之间;K 为神经元的比率系数,
K>0。在实际调试时,η 取 0.4,K 取 1.7。当 K 值取得过大 时系统发散,当 K 值取得过小时系统快速性差 [7]。
PID自控原理实验报告范文pid调节实验报告范文

PID自控原理实验报告范文pid调节实验报告范文自动控制原理实验——第七次实验实验目的了解数字PID控制的特点,控制方式。
理解和掌握连续控制系统的PID控制算法表达式。
了解和掌握用试验箱进行数字PID控制过程。
观察和分析在标PID控制系统中,PID参数对系统性能的影响。
实验内容1、数字PID控制一个控制系统中采用比例积分和微分控制方式控制,称之为PID控制。
数字PID控制器原理简单,使用方便适应性强,可用于多种工业控制,鲁棒性强。
可以用硬件实现,也可以用软件实现,也可以用如见硬件结合的形式实现。
PID控制常见的是一种负反馈控制,在反馈控制系统中,自动调节器和被控对象构成一个闭合回路。
模拟PID控制框图如下:U(s)U(s)E(s)KpKiKd输出传递函数形式:其中Kp为调节器的比例系数,Ti为调节器的积分常数,Td是调节器的微分常数。
2、被控对象数学模型的建立1)建立模型结构在工程中遇到的实际对象大多可以表示为带时延的一阶或二价惯性环节,故PID整定的方法多从这样的系统入手,考虑有时延的单容被控过程,其传递函数为:这样的有时延的单容被控过程可以用两个惯性环节串联组成的自平衡双容被控过程来近似,本实验采用该方式作为实验被控对象,如图3-127所示。
2)被控对象参数的确认对于这种用两个惯性环节串联组成的自平衡双容被控过程的被控对象,在工程中普遍采用单位阶跃输入实验辨识的方法确认和τ,以达到转换成有时延的单容被控过程的目的。
单位阶跃输入实验辨识的原理方框如图3-127所示。
对于不同的T1、T2和K值,得到其单位阶跃输入响应曲线后,由和得到和,再利用拉氏反变换公式得到To=To=t2-t1Ln1-Yoτ=t2Ln1-Yot13、采样周期的选择采样周期选择0.05s。
4、数字PID调节器控制参数的工程整定方法虽然PID调节可全面、综合的考虑系统的各项性能,但在工程实际中,考虑到工程造价和调节器的易于实现,长采用PID三个参数来对系统进行校正。
采用PID算法的高稳定恒流源设计
訾=c√[静]2+[高]2+[鲁]2㈣
式中:J。为输出电流;UN为D/A转换器输出电 压;P为失调引起的等效电压;R。为取样电阻;c为 置信系数。 要得到一个高质量的恒流源,必须采用温度系 数低、动态电阻小的基准电压源,稳定性好和精度
卜鲁
控制在0~2
500
(3)
因取样电阻采用康锰铜丝为1 Q的电阻,恒流 值与基准电压之间具有线性关系,电流调节范围可 mA之间。
万方数据
572
南京航空航天大学学报直接采用 整流桥输出(+24 V)供电,并且采用复合管来增 加放大倍数,在电路中第二级采用了大功率的 TIPl22达林顿管(主要性能参数:Jc=5
100
LM358可以安全工作‘5。。2.5 V的电源主要是作 为A/D和D/A转换器的参考电压,选用LM336— 2.5精密电压基准IC作为2.5 V的基准电压源。
source
numerical control
current
constant—current
based
on
8一digit microprocessor is designed after analyzing the
constant—current
source
main products’design.
On
PID Algorithm
B口o YkjM孢,Qin行Xi口咒yi,HP Y;,挖i咒g
(Sch001 of E1ectronic Information&Electric Engineering,Changzhou Institute of Technology,Changzhou,213002,China)
PID control algorithm is used in the total
一种基于PID算法的数控电流源设计

塌陷严 重 ,每修补一 台电脱水器需花费上百万元 ,这与新 建电
脱 水器 的投 资相 当。 因此 ,已建 设 备 已无 利用 价值 。
( 2) 原油脱水主要依靠6 座1 0 0 0 0 t r l 净化油罐 ,原油脱水难 度较大。由于孤 东油田地处渤海滩涂地 区,土壤含盐量大 、空
则一年节约燃油费为 :
6 3 5 4 . 9 9 ×2 . 1 x 3 6 5 / 1 0 0 ( ) 0 0 0 ( ) / ( ) . 8 5 = 5 7 3 0 t .1 3 1 2 . 3 3 万元 / a
静态投资回收期为4 . 3 年。
5 结 语
通 过 对 孤 东 一 号联 合站 原 油处 理 系统 分 析 可 知 :随 着孤 东
致使油井井 口回压较高,增大了采油能耗。
( 4 )站 内 目前 有 油 气 分 离 器 8 台 ,均 为 1 9 8 8 年 建 成投 产 ,
运行至今已2 0 多年 ,目前 内部分离构件老化 ,捕雾网腐蚀损坏
严重 ,已经 失效 。壳体腐蚀 老化较 为严 重 ,加上 原油含 砂量
高 ,在腐蚀和油砂磨损的双重作用下 ,8 台分离器的 纤维 加 强 。 ( 5 )为 减少 燃 料 原 油的 消 耗 ,孤 东 一 号联 合 站 2 0 0 8 年 投 运 水 煤 浆锅 炉 ,新 建 l 0 台立 式换 热 器 ,其 中2 台井 排 换 热器 未 投 运 起 来 , 自投 产 至 今一 直 处 于停 运 状 态 。8 台 脱 水换 热 器 在运 行 过 程 中 因 偏 流 及 内壁 沉 积 附 着 物 等 原 因 , 目前 串联 接 入 加 热 流
技术创新
采出液的影响 ,从1 9 9 6 年起完全不能建立电场 ,失去了电脱 水
采用PID控制的LED恒流源设计
采用PID控制的LED恒流源设计杨思俊【摘要】通过c8051f020的控制使开关电源输出电流恒定并在LED负载变化的情况下仍可驱动LED高效、稳定的工作.恒流源系统由电源电路、BUCK主电路、驱动电路、电压电流采样电路、控制电路、显示电路、断路检测模块组成.电源模块采用接触式调压器,并对输出进行整流、滤波、稳压;降压电路采用超低导通电阻及快速响应时间的功率MOSFET作为调整管;单片机根据检测电流的大小采用PID 控制输出PWM波来控制调整管,改变其输出脉冲占空比,使LED驱动电源处于恒压和恒流状态.结果表明该系统电流精度高,纹波电压小,运行稳定,效率高.%The output current of switch power supply, controlled by c8051f020,is stable, and can still drive LED working efficiently and stably with the changing of the LED load. The constant current source is composed of Power supply circuit, BUCK main circuit, drive circuit, voltage and current sampling circuit, control circuit, display circuit and open circuit detection module. Power supply module uses the contact voltage regulator and perform rectifier, filter and voltage stability for the output; Buck circuit adopts low resistance and rapid response time MOSFET; CPU determines the constant voltage mode and constant current mode according to the sampling current and changes the output pulse duty ratio,which adopts PID Control, and makes the LED drive power supply in constant voltage or constant current. Results show that the system current is of high precision, small ripple voltage, stable running and high efficiency.【期刊名称】《微处理机》【年(卷),期】2017(038)002【总页数】4页(P82-85)【关键词】降压电路;恒流控制;PID控制;LED恒流源;c8051f020控制器;PWM占空比;PID算法【作者】杨思俊【作者单位】西安航空职业技术学院,西安 710089【正文语种】中文【中图分类】TN73LED恒流驱动电源的总体结构框图如图1所示,主要由如下几大部分组成:电源电路、BUCK主电路、驱动电路、电压电流采样电路、控制电路、显示电路、断路检测模块。
PID控制报告

PID控制报告学院:电气学院专业班级:自动化08-06班姓名:程洪记学号:310808020606e(t) + u(t) + c(t) PID 校正装置是一种有源校正装置,它是最早发展起来的控制策略之一,在工业过程控制中有着最广泛的应用,其实现方式有电气式、气动式和液力式。
与无源校正装置相比,它具有结构简单、参数易于整定、应用面广等特点,设计的控制对象可以有精确模型,并可以是黑箱或灰箱系统。
总体而言,它主要有如下优点:(1)原理简单,应用方便,参数整定灵活。
(2)适用性强。
可以广泛应用于电力、机械、化工、热工、冶金、轻工、建材、石油等行业。
(3)鲁棒性强。
即其控制的质量对受控对象的变化不太敏感,这是它获广泛应用的最重要的一原因。
因为在实际的受控对象,例如由于受外界的扰动时,尤其是外界负荷发生变化时,受控对象特性会发生很大变化,为得到良好的控制品质,必须经常改变控制器的参数,这在实际操作上是非常麻烦的;又如,由于环境的变化或设备的老化,受控对象模型的结构或参数均会发生一些不可知的变化,为保证控制质量,就应对控制器进行重新设计,这在有些过程中是不允许的。
因此,如果控制器鲁棒性强,则就无须经常改变控制器的参数或结构。
PID 控制的原理PID 控制器是一种基于偏差在“过去、现在和将来”信息估计的有效而简单的控制算法。
而采用PID 控制器的控制系统其控制品质的优劣在很大程度上取决于 PID 控制器参数的整定。
PID 控制器参数整定,是指在控制器规律己经确定为PID 形式的情况下,通过调整PID 控制器的参数,使得由被控对象、控制器等组成的控制回路的动态特性满足期望的指标要求,达到理想的控制目标。
对于PID 这样简单的控制器,能够适用于广泛的工业与民用对象,并仍以很高的性价比在市场中占据着重要地位,充分地反映了PID 控制器的良好品质。
PID 控制器是通加对误差信号e(t)进行比例、积分和微分运算,其结果的加权,得到控制器的输出u(t),该值就是控制对象的控制值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
天津工业大学测控仪器设计报告组号 2 组组员吴东航1110340108章一林1110340114郭伍昌1110340109 学院机械工程学院专业测控技术与仪器指导教师隋修武2015 年1 月16 日目录1 课程设计的目的和意义 (3)2 设计任务 (3)3 设计背景 (3)4 总体设计方案 (4)5 硬件电路设计 (4)5.1 采样模块 (4)5.2 滤波模块......................................................................................... 错误!未定义书签。
5.3 运算放大模块 (6)5.4 A/D转换模块 (7)5.5 显示模块 (9)6 软件电路设计 (10)6.1流程图 (10)6.2 PID控制算法 (13)6.3 PWM输出 (13)6.4 A/D转换 (14)7 调试与仿真结果分析 (14)8 心得体会 (14)9参考文献 (15)附录一电路图 (16)附录二程序 (17)摘要:针对各种低压电器校验及性能测试过程中需要高稳定、高精度的恒流源要求, 在对现有主要恒流源产品设计仔细分析的基础上, 设计了一种以AT89C51为核心的高稳定数控恒流源。
整个系统采用闭环PID控制, 输出PWM波控制恒流源的电流。
经实际应用测试, 该恒流源输出电流可在10 mA 左右恒定, 当电源电压变化、负载电路变化时,恒流源的精度在±1mA以内。
1 课程设计的目的和意义测控系统设计是测控技术与仪器专业实践教学环节的重要组成部分,是“测控系统原理与设计”课程理论教学的有益补充,“测控系统原理与设计”是测控技术与仪器专业的一门综合性专业课,在理论教学的同时,要求学生掌握传感器的选型,测控电路的分析、设计、调试,微处理器的电路与程序设计、控制算法设计、计算机的综合应用等,以便对测控系统形成完整的认识。
通过本课程设计,完成基于PID控制的数字恒流源的设计,熟悉和掌握工业生产和科学研究中的测量和控制系统的组成原理及设计方法,学会运用所学的单片机、测控电路、控制算法等方面的知识,进行综合应用,设计出完整的测控系统,实现预期功能,培养自学能力、动手能力、分析问题能力和应用理论知识解决实际问题的能力。
2 设计任务设计基于PID控制的数字恒流源,设计要求如下1、采用8051系列单片机输出PWM波控制恒流源的电流。
2、采用PID控制算法,实现对恒流源的闭环控制。
3、恒流源的电压为5V,恒流输出10mA。
4、采用LCD液晶1602显示电流值。
5、当电源电压变化、负载电路变化时,恒流源的精度在±1mA以内。
3 设计背景相对于电压源, 电流源具有抗干扰能力强, 信号传输不受距离影响等。
电流源是一种能向负载提供恒定电流的电路。
它既可以为各种放大电路提供偏流以稳定其静态工作点, 又可以作为其有源负载以提高放大倍数, 在差动放大电路、脉冲产生电路中得到了广泛应用。
一般的恒流电流源往往是固定的一种输出电流值,或仅有几挡电流值, 往往存在调节范围小、稳定性差等缺点, 不便于通用,且所设定的输出电流值是否准确不经测试无法知道。
低纹波、高精度稳定直流电流源是一种非常重要的特种电源, 在现代科学研究和工业生产中得到了越来越广泛的应用。
4 总体设计方案以AT89C51为核心,采用闭环PID控制,输出PWM波控制恒流源的电流,经信号调理后,通过A/D转换送入单片机,通过LCD显示电流。
由于单片机控制算法灵活, 程序相对简单, 且成本较低, 故选用AT89C51单片机实现数字控制。
为实现电流模拟量到数字量的转换,故选用ADC0809实现A/D转换。
通过三极管C9014及相关电路实现电流信号的放大。
为获得稳定的电流设计一个RC滤波电路去除干扰。
具体来说, 该数字恒流源主要由以下模块构成:采样模块、滤波模块、运算放大模块、A/D转换、显示模块等。
图1为系统结构框图。
图1 系统结构框图5 硬件电路设计5.1 采样模块通过单片机输出的PWM波,由于从PWM处输出的方波通过三极管后,通过采样电阻R6,以保证IN1处的电压恒定,为了使得A/D转换标度变换计算方便,减少计算机的计算量,因此R6电阻阻值采用100欧姆,当电流输出为10mA的时候,对应电压值为1V。
为了使得输出的电压值趋于平缓,因此增加电容C4(100uF),将交流转换为直流电压输出。
当三极管工作在非线性区(即三极管工作在饱和区或截止区),此时三极管相当于开关器件。
PWM波为高电平时,三极管b-e端导通,保证IN1处输出恒定电压;PWM波为低电平时,b-e端截止,IN1出R6处无电流。
三极管采样模块电路设计如图2所示。
本设计中采用三极管C9014充当放大器件,9014是非常常见的晶体三极管,在收音机以及各种放大电路中经常看到它,应用范围很广,它是NPN型小功率三极管。
图3为三极管C9014的管脚图。
图2 采样模块电路设计图3 C9014管脚图5.3 运算放大模块电阻R7和C5构成简单的滤波电路,由于标度变换使得运放为1,因此将反向输入和输出连在一起构成电压跟随器。
在这里我们选用了两个方案,第一种用OP07构成电压跟随器,OP07闭环带宽约为400~500kHz,并且当VCC给5V时,运放线性区最大输出电压一般只有3V左右,经实验测得由OP07构成的电压跟随器输出不稳定。
第二种方案选用LM324构成的电压跟随器,经实验测得满足要求。
从运放的输出端输出送入A/D转换模块。
运算放大电路如图5所示。
本设计中采用LM324四运放集成芯片,它采用14脚双列直插塑料封装。
它的内部包含四组形式完全相同的运算放大器,除电源共用外,四组运放相互独立。
每一组运算放大器可用图6所示的符号来表示,它有5个引出脚,其中“+”、“-”为两个信号输入端,“V+”、“V-”为正、负电源端,“Vo”为输出端。
两个信号输入端中,Vi-(-)为反相输入端,表示运放输出端Vo的信号与该输入端的位相反;Vi+(+)为同相输入端,表示运放输出端Vo的信号与该输入端的相位相同。
图6为LM324的引脚图。
图5 信号放大模块电路设计图6 LM324引脚图5.4 A/D转换模块通过ADC0809将获得的电流转换成数字量后,送入单片机。
ADC0809是8位的逐次逼近型A/D转换器,带8个模拟输入通道,芯片内带地址译码器输出带三态数据锁存器。
本例所使用的IN0通道地址为000,由于本例仅使用了IN0通道,因此电路中直接将这ADDC、ADDB、ADDA三只引脚全部接地。
A/D转换电路如图7所示。
START引脚在一个高脉冲后启动A/D转换,当EOC引脚出现一个低电平时转换结束,然后由OE引脚控制,从并行输出端读取一字节的转换结果。
转换过程中芯片所需要的时钟信号由单片机定时器中断子程序提供。
图8为ADC0800的引脚图。
图7 A/D转换模块电路设计图8 ADC0809引脚图5.6 A/D参考电压模块为了实现标度变换,采用TL431构成的可调稳压模块作为A/D的参考电压。
将参考电压调成2.55V,通过式(1)计算得到,电压值和转换值的对应关系为100倍,这样减少了CPU 的计算量,减少了失误。
参考电压模块电路图如图9。
2.55255iiND(1)图9 可调稳压模块5.5 显示模块采用LCD1602显示电流值。
本设计中将单片机P0口通过排阻与1602相连,构成电路的显示模块。
如图10所示。
LCD1602是工业字符型液晶,能够同时显示16x02即32个字符。
具有微功耗、体积小、显示内容丰富、超薄轻巧的特点,常用在袖珍式仪表和低功耗应用系统中。
1602的各管脚功能如图10所示, 1脚VSS为电源地;2脚VCC接5V 电源正极;3脚V0为液晶显示器对比度调整端,接正电源时对比度最弱,接地电源时对比度最高(对比度过高时会产生“鬼影”,使用时可以通过一个10K 的电位器调整对比度);4脚RS为寄存器选择,高电平1时选择数据寄存器、低电平0时选择指令寄存器。
5脚RW为读写信号线,高电平(1)时进行读操作,低电平(0)时进行写操作; 6脚E(或EN)端为使能(enable)端,高电平(1)时读取信息,负跳变时执行指令;7~14脚D0~D7为8位双向数据端;15~16脚空脚或背灯电源;15脚背光正极;16脚背光负极。
图10 显示模块电路设计图11 LCD1602引脚图6 软件电路设计6.1流程图系统软件完成以下几个功能:(1)系统初始化, 包括各外围接口芯片的初始化;(2)用PID 算法实现对恒流源的闭环控制,由PID计算后得到的输出值控制PWM波;(3)实现A/D 转换;(4)LCD的送显功能;(5)移动滤波部分。
主程序流程图如图12所示,LCD1602子程序流程图如图13所示,移动滤波子程序流程图如图14所示,A/D转换子程序流程图如图15所示。
图12 系统主程序流程图图13 LCD1602子程序流程图图14移动滤波子程序流程图6.2 PID控制算法比例、积分、微分控制( PID控制) 是过程控制中应用最广泛的一种控制方式。
比例控制是一种最简单的控制方式。
其控制器的输出与输入误差信号成比例关系。
当仅有比例控制时系统输出存在稳态误差;在积分控制中,控制器的输出与输入误差信号的积分成正比关系,为了消除稳态误差,在控制器中必须引入“积分项”,积分项对误差取决于时间的积分,随着时间的增加,积分项会增大它推动控制器的输出增大使稳态误差进一步减小,直到等于零;在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系,自动控制系统在克服误差的调节过程中可能会出现振荡甚至失稳,应使抑制误差的作用的变化“超前”,即在误差接近零时,抑制误差的作用就应该是零,即加入微分环节。
在本系统中, 采用增量式PID 控制对电流偏差值进行处理, 其公式如下:如令,,(式中,为纯比例作用下的临界振荡周期),则有这样整个问题便简化为只要一个参数,故称其为归一参数整定法。
改变,观察控制效果,直到满意为止,该法为实现简易的自整定控制带来方便。
K ,通过PID增量式得出PID=,再加上控制目在本系统中,另 3.6p标来控制PWN波的占空比,即 PWM_ON=Last_out+PID,从而通过PID控制算法,实现对恒流源的闭环控制。
6.3 PWM输出PWM波是通过定时中断实现的,定时时间为0.2ms,即每0.2ms中断一次。
PWM 波的占空比经过PID控制算法,从而达到跟踪的目的。
因此,经过PID增量控制算法后得到的PWM_ON=Last_out+PID修订了的值。
将PWM波的周期设定为200个定时周期即0.2ms*200=40ms,每进一次中断服务子程序就比较一下高电平数是否到了PWM_ON,如果没到,就让输出为一个定时周期的高电平,要是高电平数到了PWM_ON,就输出(FFH-PWM_ON)个低电平,一直到200个定时周期结束为一个PWM波周期。