【CN209919887U】一种气动肌肉驱动的五指灵巧手【专利】
气动肌肉驱动的灵巧手指及模糊PID控制
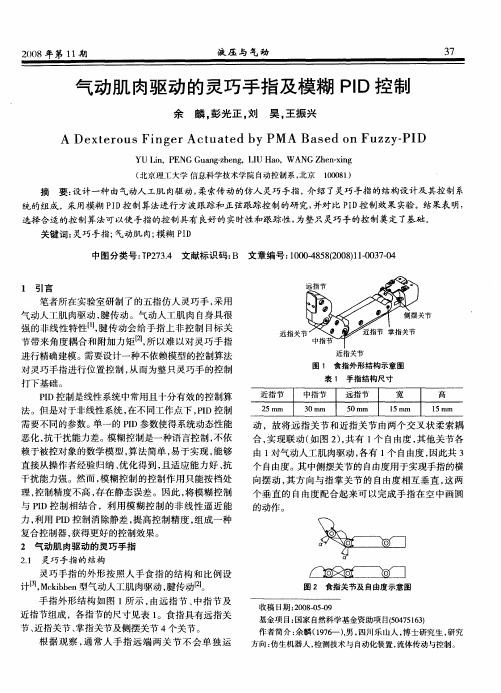
动 ,故将远指关 节和近指关 节由两个交叉 状柔索耦 合, 实现联动( 图 2 , 如 )共有 1 自由度 , 个 其他关节各
由1 对气动人工肌肉驱动 , 各有 1 自由度 , 个 因此共 3 个 自由度 。 中侧摆关节的 自由度用 于实现手指的横 其 向摆 动 , 其方 向与指掌关节的 自由度相互垂 直 , 这两 个垂直的 自由度配合起来可 以完成 手指在 空中画圆 的动 作 。
1 引 言
笔者所在实验室研制 了的五指仿人灵巧手 , 采用 气动人工肌肉驱动 , 腱传动。气动人工肌 肉 自身具很 强 的非线性特性【, l腱传动会 给手指上非控制 目标关 J 节带来角度耦合 和附加力矩 , 所以难 以对灵 巧手指 进行精确建模 。 需要设计一种不依赖模型的控制算法 对灵巧手指进行位置控 制 , 从而为整只灵巧手的控制 打下基 础 。
宽
l 5 mm
Hale Waihona Puke 高 1 5mm 需要不 同的参数。 单一的 PD参数使得系统动态性能 I 恶化 , 抗干扰能力差。模糊控制是一种语言控制, 不依 赖于被控对象 的数学模型 , 算法简单 , 易于实现 , 能够 直接从操作者经验归纳 、 优化得到 , 且适应能力好 、 抗 干扰能力强。然而 , 模糊控制的控制作用只能按档处 理, 控制精度不高 , 存在静态误差 。因此 , 将模糊控制 与 PD控制相结合 ,利用模 糊控制的非线 性逼近能 I 力, 利用 PD控制消除静差 , I 提高控制精度 , 组成一种 复合控制器 , 获得更好 的控制效果 。 2 气 动肌 肉驱 动的 灵巧 手指
灵 巧 手 指 的 外形 按 照 人 手 食 指 的 结 构 和 比例 设 计I, c i e 型气动人工肌肉驱动 , j M k bn j h 腱传动r 2 I 。
【CN209919908U】五指仿生机械手【专利】

(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920397983.5(22)申请日 2019.03.27(73)专利权人 华南理工大学地址 510640 广东省广州市天河区五山路381号(72)发明人 李哲林 王遵富 杨辛霖 谭泺滨 姜立军 (74)专利代理机构 广州市华学知识产权代理有限公司 44245代理人 李斌(51)Int.Cl.B25J 15/00(2006.01)B25J 9/10(2006.01)(54)实用新型名称五指仿生机械手(57)摘要本实用新型公开了一种五指仿生机械手,包括手掌部分、手指部分和控制电路;手掌部分外壳分为手掌底壳和手掌面壳;手掌部分包括五个舵机;手指部分包括五个手指,每个手指均有两个指节,两个指节之间采用弹性形变材料进行连接,直接连接处有放置弹性形变材料的孔洞,采用螺钉固定弹性形变材料;五个指节的近端指节均有孔洞供钢丝绳穿过,钢丝绳连接后采用螺钉进行固定。
本实用新型具有成本低、结构简洁、体积小巧的优点,有利于进行普及和应用。
权利要求书1页 说明书3页 附图3页CN 209919908 U 2020.01.10C N 209919908U权 利 要 求 书1/1页CN 209919908 U1.一种五指仿生机械手,其特征在于,包括手掌部分、手指部分和控制电路;手掌部分外壳分为手掌底壳和手掌面壳;手掌部分包括五个舵机,分别为一个旋转舵机和四个拉伸舵机;四个拉伸舵机头尾相连组成正方形,固定于舵机架上,舵机架固定于手掌底壳上;旋转舵机直接固定于手掌底壳上;控制电路设置在舵机架与手掌外壳之间的空间;手掌外壳设置有铰链支座;手指部分包括五个手指,分别为大拇指、食指、中指、无名指和尾指;每个手指均有两个指节,根据距离手掌部分的距离远近分为远端指节和近端指节;每个手指近端指节通过铰链与手掌部分相连接;两个指节之间采用弹性形变材料进行连接,指节连接处有放置弹性形变材料的孔洞,采用螺钉固定弹性形变材料;大拇指采用钢丝绳与拉伸舵机与旋转舵机相连接,钢丝绳从拉伸舵机转盘中拉出,连接旋转舵机,并从旋转舵机的转盘中央小孔处拉出与大拇指近端指节和远端指节连接;食指、中指、无名指和尾指与另外三个拉伸舵机相连接,其中食指和中指各连接一个拉伸舵机,无名指和尾指共同连接一个拉伸舵机;食指、中指、无名指和尾指的近端指节与远端指节均通过钢丝绳与相应的拉伸舵机相连接;五个指节均有孔洞供钢丝绳穿过,钢丝绳连接后采用螺钉固定在远端指节中。
气动人工肌肉驱动的仿人灵巧手结构[发明专利]
![气动人工肌肉驱动的仿人灵巧手结构[发明专利]](https://img.taocdn.com/s3/m/87ec37ca192e45361166f5b1.png)
专利名称:气动人工肌肉驱动的仿人灵巧手结构专利类型:发明专利
发明人:余麟,彭光正,范伟,刘昊
申请号:CN200610066259.1
申请日:20060331
公开号:CN101045300A
公开日:
20071003
专利内容由知识产权出版社提供
摘要:一种气动人工肌肉驱动的仿人灵巧手结构,主要由拇指骨(1),食指骨(2),中指骨(3),无名指骨(4),小指骨(5),拇指连接掌(6),中间掌(7),小指连接掌(8)和人工腱(9)组成,其中,除拇指骨(1)稍有不同以外,其他四指结构形式相同,皆由远指单元体(A),中指单元体(B)和近指单元体(C)组成;四指与指掌连接件(71)相连接,再通过横向运动关节(72)与中间掌(7)和小指连接掌(8)相连接;拇指骨(1)通过拇近指关节(14)与拇指连接掌(6)连接;手骨总计有21个关节,17个自由度,可实现手指骨的屈伸和外展动作,拇指骨(1)与食指骨(2)间呈20度角,四指骨中心线距为20mm,拇指横向运动0度至60度,四指横向运动负15度至正15度,关节运动范围为0度至90度。
本发明与气动人工肌肉配套使用,手指运动空间大,具有很强的亲和力,结构简单,使用维护修理简易。
申请人:北京理工大学
地址:100081 北京市海淀区中关村南大街5号
国籍:CN
代理机构:小松专利事务所
代理人:洪善信
更多信息请下载全文后查看。
气动人工肌肉驱动仿人灵巧手的设计

气动人工肌肉驱动仿人灵巧手的设计
范伟;余麟;刘昭博;刘昊;彭光正
【期刊名称】《机床与液压》
【年(卷),期】2006(000)008
【摘要】提出应用气动人工肌肉的五指灵巧手设计方案,包括各手指的结构设计以及手指与手掌的连接设计,手指采用腱传动方式,灵巧手总共具有17个自由度.手指端有滑觉传感,手掌中有握紧力传感.该灵巧手具有充分的自由度,结构紧凑、新颖,并具有力知觉能力,仿生性好.
【总页数】4页(P62-65)
【作者】范伟;余麟;刘昭博;刘昊;彭光正
【作者单位】北京理工大学自动控制系,北京,100081;北京理工大学自动控制系,北京,100081;北京理工大学自动控制系,北京,100081;北京理工大学自动控制系,北京,100081;北京理工大学自动控制系,北京,100081
【正文语种】中文
【中图分类】TP2
【相关文献】
1.气动人工肌肉驱动灵巧手的设计与研究 [J], 张氢;覃昶;孙远韬
2.一种气动人工肌肉驱动的七自由度仿人手臂的设计 [J], 彭光正;王毅枫;孙海默
3.气动人工肌肉驱动器驱动六足爬行机器人的步态选择和结构设计 [J], 张之璐;彭光正;朱智乾;范伟
4.气动人工肌肉驱动仿人灵巧手的结构设计 [J], 彭光正;余麟;刘昊
5.气动人工肌肉驱动仿人肩关节机器人的设计及力学性能分析 [J], 刘昱;王涛;范伟;王渝;黄清珊
因版权原因,仅展示原文概要,查看原文内容请购买。
一种用于机器人全驱动手指气动肌肉的张紧结构[发明专利]
![一种用于机器人全驱动手指气动肌肉的张紧结构[发明专利]](https://img.taocdn.com/s3/m/efef91f29fc3d5bbfd0a79563c1ec5da51e2d64f.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201911018675.8(22)申请日 2019.10.24(71)申请人 浙江工业大学地址 310014 浙江省杭州市下城区潮王路18号(72)发明人 朱李垚 葛涵 陈志培 陶志成 杨邦出 鲍官军 (74)专利代理机构 杭州杭诚专利事务所有限公司 33109代理人 尉伟敏(51)Int.Cl.B25J 9/10(2006.01)B25J 15/00(2006.01)(54)发明名称一种用于机器人全驱动手指气动肌肉的张紧结构(57)摘要本发明公开了一种用于机器人全驱动手指气动肌肉的张紧结构,旨在解决现在的欠驱动手的腱绳容易产生形变,造成驱动死区,减少机械手的工作空间以及增加其精确控制的不足。
该发明包括驱动腱绳和回复腱绳,所述腱绳呈“8”字形卷绕在滑轮上,腱绳固定连接滑轮,驱动腱绳与回复腱绳的卷绕方向相反,腱绳末端设有用于张紧的拉簧。
能对传动的腱绳进行及时的张紧,尽可能长的保证机械手的工作空间、减小其精确控制的难度。
权利要求书1页 说明书7页 附图5页CN 111390891 A 2020.07.10C N 111390891A1.一种用于机器人全驱动手指气动肌肉的张紧结构,气动肌肉驱动手指的关节转动,关节上固定连接有滑轮,滑轮带动关节转动,其特征是,气动肌肉和关节之间连接有腱绳,腱绳包括驱动腱绳和回复腱绳,所述腱绳卷绕在滑轮上,腱绳固定连接滑轮,驱动腱绳与回复腱绳的卷绕方向相反,腱绳末端设有用于张紧的拉簧。
2.根据权利要求1所述的一种用于机器人全驱动手指气动肌肉的张紧结构,其特征是,还包括有气动肌肉支架,所述气动肌肉支架包括第一平板、第二平板、第一预紧机构定位块和第二预紧机构定位块,所述第一平板、第二平板、第一预紧机构定位块和第二预紧机构定位块围成一个两侧开放的盒体结构,第一平板和第二平板上分别设有互相平行的开孔,所述开孔形成用于通过腱绳的导向孔,第一预紧机构定位块和第二预紧机构定位块上分别可调连接有预紧螺钉,预紧螺钉末端转动连接有预紧轴承,所述预紧轴承的外缘抵接在腱绳上。
一种具有可变形手掌机构的气缸驱动型灵巧手[发明专利]
![一种具有可变形手掌机构的气缸驱动型灵巧手[发明专利]](https://img.taocdn.com/s3/m/4228acd49a89680203d8ce2f0066f5335a8167b4.png)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 202011333146.X(22)申请日 2020.11.24(71)申请人 北京邮电大学地址 100876 北京市海淀区西土城路10号(72)发明人 魏世民 张英坤 朱赣闽 喻洋 盛海燕 陈冠男 (51)Int.Cl.B25J 15/10(2006.01)B25J 15/02(2006.01)B25J 17/02(2006.01)(54)发明名称一种具有可变形手掌机构的气缸驱动型灵巧手(57)摘要本发明涉及灵巧手技术领域,并公开了一种具有可变形手掌机构的气缸驱动型灵巧手的结构设计,包括四根相同结构的欠驱动手指、手掌以及手掌封装盒;欠驱动手指由三个指节、三个旋转轴、手指基座以及手指驱动气缸构成;手掌设有滑槽,与手指基座滑动连接。
本发明采用气缸驱动,控制原理简单,控制更加容易;欠驱动手指的运动转化机构,能够将气缸的直线驱动转化为欠驱动手指的弯曲/伸展运动;通过控制变形驱动气缸的活塞杆的伸长量改变手掌两侧欠驱动手指之间的径向间距,进而改变灵巧手的可抓取范围。
权利要求书2页 说明书5页 附图9页CN 112536813 A 2021.03.23C N 112536813A1.一种具有可变形手掌机构的气缸驱动型灵巧手,包括四根相同结构的欠驱动手指1、手掌2以及手掌封装盒3,其特征在于;所述的欠驱动手指1包括三个指节、三个旋转轴、手指基座17、手指驱动气缸18,三个指节分别为远指节11、中指节12和近指节13,三个旋转轴分别为第一旋转轴14、第二旋转轴15和第三旋转轴16,远指节11通过第一旋转轴14与中指节12转动连接,中指节12通过第二旋转轴15与近指节13转动连接,近指节13通过第三旋转轴16与手指基座17转动连接;所述的手指驱动气缸18安装于手指基座17内部,手指驱动气缸18与手指基座17利用进气快接头和排气快接头固定连接;所述的欠驱动手指1还包括中指节连杆19、第一弹性连杆20、第一传动连杆21、第一弹性连杆旋转轴22、近指节连杆23、第二弹性连杆24、第二传动连杆25、第二弹性连杆旋转轴26、第三传动连杆27、双头连接块28;中指节连杆19的一端与远指节11转动连接,中指节连杆19的另一端与第一传动连杆21转动连接,第一传动连杆21通过第二旋转轴15与中指节12转动连接;第一弹性连杆20的一端与中指节连杆19转动连接,第一弹性连杆20的另一端通过第一弹性连杆旋转轴22与近指节13转动连接;近指节连杆23的一端与第一传动连杆21转动连接,近指节连杆23的另一端与第二传动连杆25转动连接,第二传动连杆25通过第三旋转轴16与近指节13转动连接;第二弹性连杆24的一端与近指节连杆23转动连接,第二弹性连杆24的另一端通过第二弹性连杆旋转轴26与手指基座17转动连接;双头连接块28通过螺纹孔与手指驱动气缸18的活塞杆固定连接,第三传动连杆27的一端与双头连接块28转动连接,第三传动连杆27的另一端与第二传动连杆25转动连接;所述的手掌2设有滑槽,与手指基座17滑动连接;所述的可变形手掌机构包括双耳连接块31、变形传动连杆32、变形传动连杆转轴33、变形驱动气缸34、气缸固定座35,变形传动连杆32的一端通过变形传动连杆转轴33与手指基座17转动连接,变形传动连杆32的另一端与双耳连接块31转动连接,双耳连接块31通过螺纹孔与变形驱动气缸34固定连接,变形驱动气缸34与气缸固定座35利用进气快接头和排气快接头固定连接,气缸固定座35利用螺丝固定在手掌封装盒3上;所述的手掌封装盒3包括U型外壳和两侧的手掌封装盒侧壁4,U型外壳和两侧的手掌封装盒侧壁4利用螺丝与手掌2固定连接,手掌封装盒侧壁4上设有圆角矩形通孔5。
一种气动闸线驱动且具有人手特征的机械手[发明专利]
![一种气动闸线驱动且具有人手特征的机械手[发明专利]](https://img.taocdn.com/s3/m/5346fa9da417866fb94a8e51.png)
专利名称:一种气动闸线驱动且具有人手特征的机械手
专利类型:发明专利
发明人:王舒扬,蔡赟,刘溢泉,郑彭元,陈宇,李洋,方兴,柳虹亮申请号:CN201410481662.5
申请日:20140922
公开号:CN105500399A
公开日:
20160420
专利内容由知识产权出版社提供
摘要:本发明公开了一种气动闸线驱动的具有人手特征的机械手。
包括五个机械手指、一个手掌、限位驱动装置和气路回路;机械手指均依次包括上、中、下指节和连接元件。
气路控制系统包括气源装置、气缸、调压阀、电磁换向阀及气管;五个机械手指的下指节分别通过各自的连接件同一方向安装在机械手掌内;分别用细闸线穿过上、中、下指节和连接件,并在上指节进行固定,闸线另一端穿过限位件与气缸连接作为驱动装置。
根据气动的柔性优点,研制了机械手的气体驱动工作过程和相应的气动回路,使机器手的抓取力度可调。
本发明的气动闸线驱动方式且具有人手特征的机械手极高的还原了人手抓取的动作,可以用仿生机器人、康复机器人及工业机器人等领域。
申请人:长春工业大学
地址:130012 吉林省长春市朝阳区延安大街2055号
国籍:CN
更多信息请下载全文后查看。
一种基于气动人工肌肉的自适应多自由度仿人机械手[发明专利]
![一种基于气动人工肌肉的自适应多自由度仿人机械手[发明专利]](https://img.taocdn.com/s3/m/9b90b67351e79b89690226d5.png)
专利名称:一种基于气动人工肌肉的自适应多自由度仿人机械手
专利类型:发明专利
发明人:金英子,毛文波,向新贤,余辅波
申请号:CN201410841137.X
申请日:20141229
公开号:CN104589310A
公开日:
20150506
专利内容由知识产权出版社提供
摘要:本发明涉及一种基于气动人工肌肉的自适应多自由度仿人机械手。
目的是提供的机械手应具备人手的一些基功能,并具有实用、柔顺、安全、体积小、轻巧、易控制以及机构简单的特点。
技术方案是:一种基于气动人工肌肉的自适应多自由度仿人机械手,包括气路控制系统;该仿人机械手还包括机械手机构以及人工肌肉系统。
机械手机构包括机械大臂、机械小臂、手以及五个手指;所述人工肌肉系统包括驱动机械大臂的若干根第三气动人工肌肉和若干根第四气动人工肌肉、驱动机械小臂的若干根第一气动人工肌肉、驱动腕关节的若干根第五气动人工肌肉以及驱动五个手指的若干根第二气动人工肌肉。
申请人:浙江理工大学
地址:310018 浙江省杭州市下沙高教园区白杨街道2号大街5号
国籍:CN
代理机构:杭州九洲专利事务所有限公司
代理人:王洪新
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)实用新型专利
(10)授权公告号 (45)授权公告日 (21)申请号 201920259810.7
(22)申请日 2019.03.01
(73)专利权人 浙江工业大学
地址 310014 浙江省杭州市下城区朝晖六
区潮王路18号
(72)发明人 杨邦出 鲍官军 葛涵 朱李垚
陶志成 陈志培
(74)专利代理机构 杭州斯可睿专利事务所有限
公司 33241
代理人 王利强 李百玲
(51)Int.Cl.
B25J 9/10(2006.01)
B25J 9/14(2006.01)
B25J 15/00(2006.01)
(ESM)同样的发明创造已同日申请发明专利
(54)实用新型名称
一种气动肌肉驱动的五指灵巧手
(57)摘要
一种气动肌肉驱动的五指灵巧手,包括用于
与工业机械连接的连接法兰以及安装在连接法
兰上的四根弯曲单指和一根大拇指;每根弯曲单
指均包括弯曲单指掌骨、弯曲单指近指端、弯曲
单指中指端和弯曲单指远指端,关节之间均通过
铰链铰接,每个铰链的铰链轴外套装一个弯曲单
指复位扭簧;所述弯曲单指掌骨的手背一侧设有
弯曲单指气动肌肉a,所述弯曲单指近指端的手
背一侧设有弯曲单指气动肌肉b,所述弯曲单指
近指端上还系有弯曲单指肌腱c;所述大拇指包
括大拇指掌骨、大拇指近指端和大拇指远指端。
本实用新型提供了一种气动肌肉驱动的五指灵
巧手,在不施加驱动力状态下,其初始状态为握着状态的五指灵巧手,该五指灵巧手施加驱动力后,
手指将会张开。
权利要求书2页 说明书5页 附图4页CN 209919887 U 2020.01.10
C N 209919887
U
权 利 要 求 书1/2页CN 209919887 U
1.一种气动肌肉驱动的五指灵巧手,其特征在于:包括用于与工业机械连接的连接法兰以及安装在连接法兰上的四根弯曲单指和一根大拇指;
每根弯曲单指均包括弯曲单指掌骨、弯曲单指近指端、弯曲单指中指端和弯曲单指远指端,所述弯曲单指掌骨的前端与弯曲单指近指端的后端之间、所述弯曲单指近指端的前端与弯曲单指中指端的后端之间、弯曲单指中指端的前端与弯曲单指远指端的后端均通过铰链铰接,每个铰链的铰链轴外套装一个弯曲单指复位扭簧;所述弯曲单指掌骨的手背一侧设有弯曲单指气动肌肉a,所述弯曲单指气动肌肉a的末端与弯曲单指肌腱a的后端连接,所述弯曲单指肌腱a的前端连接于弯曲单指近指端;所述弯曲单指中指端的后部设有弯曲单指中指端绕线柱,所述弯曲单指远指端的后部设有弯曲单指远指端绕线柱,所述弯曲单指近指端的手背一侧设有弯曲单指气动肌肉b,所述弯曲单指气动肌肉b的末端与弯曲单指肌腱b的后端连接,所述弯曲单指肌腱b的前端连接于弯曲单指中指端绕线柱,所述弯曲单指近指端上还系有弯曲单指肌腱c,所述弯曲单指肌腱c绕过弯曲单指中指端绕线柱底部,且连接于弯曲单指远指端绕线柱;
相邻两个弯曲单指的弯曲单指掌骨之间设有弯曲单指摆动关节气动肌肉,每个弯曲单指摆动关节气动肌肉外套有弯曲单指复位压簧;弯曲单指复位压簧的左右两端分别与相邻的两个弯曲单指掌骨连接;
所述大拇指包括大拇指掌骨、大拇指近指端和大拇指远指端,所述大拇指掌骨的前端与大拇指近指端的后端之间、所述大拇指近指端的前端与大拇指远指端的后端之间均过铰链铰接,每个铰链的铰链轴外套装一个大拇指复位扭簧;所述大拇指掌骨的手背一侧设有大拇指近指端气动肌肉,所述大拇指近指端气动肌肉的末端与大拇指肌腱a的后端连接,所述大拇指肌腱a的前端连接于大拇指近指端;所述大拇指远指端的后部设有大拇指远指端绕线柱,所述大拇指近指端的手背一侧设有大拇指远指端气动肌肉,所述大拇指远指端气动肌肉的末端与大拇指肌腱b的后端连接,所述大拇指肌腱b的前端连接于大拇指远指端绕线柱;
所述大拇指掌骨在朝向手心一侧设有连接片,在连接片与连接法兰之间设有大拇指摆动关节气动肌肉,所述大拇指摆动关节气动肌肉外套有大拇指复位压簧。
2.如权利要求1所述的一种气动肌肉驱动的五指灵巧手,其特征在于:所述弯曲单指气动肌肉a、弯曲单指气动肌肉b、大拇指近指端气动肌肉、大拇指远指端气动肌肉、弯曲单指摆动关节气动肌肉和大拇指摆动关节气动肌肉均为气动肌肉,结构相同,各个气动肌肉通过气动比例阀组与进气装置连接;所述气动肌肉包括可伸缩的管子和接口,可伸缩的管子的一端接口连接,另一端安装在相应的关节上,各个肌腱与相应的气动肌肉的接口连接;可伸缩的管子是由橡胶膜片以及内壁面上的无弯曲纤维组成,橡胶膜片为气密封,密封住工作介质,纤维用于加强强度并产生能量;通过对可伸缩的管子在一端封闭的情况下对另一端充气,当内部压力增大时,橡胶膜片会沿着径向膨胀,并产生轴向的收缩,从而实现相应的驱动。
3.如权利要求1或2所述的一种气动肌肉驱动的五指灵巧手,其特征在于:每根弯曲单指远指端在朝向手心一侧均设有弯曲单指指尖压力传感器阵列,所述大拇指远指端在朝向手心一侧设有大拇指指尖压力传感器阵列,弯曲单指指尖压力传感器阵列和大拇指指尖压力传感器阵列均与控制器连接,所述控制器通过气动比例阀组分别与各个气动肌肉连接。
2。