手持式水果辅助采摘器的设计
智能水果采摘机器人设计与制作

智能水果采摘机器人设计与制作随着现代科技的不断发展,智能机器人已经越来越普遍。
在农业领域,智能机器人也逐渐得到了广泛的应用。
其中,智能水果采摘机器人是一种十分实用的机器人,可以提高水果采摘效率,大大减轻人力负担。
本文旨在探讨智能水果采摘机器人的设计与制作。
一. 机器人设计1.1 机器人结构设计智能水果采摘机器人的结构设计应该根据水果的特点进行设计。
一般水果采摘机器人包括机械臂、传感器和控制系统。
其中,机械臂是最核心的部分,可以完成采摘工作。
机械臂主要由机身、动力系统、传感系统和工具组成。
机身应该具有足够的刚性,以维持整个机器人的稳定性。
动力系统可以选择电力或气压作为动力源。
传感系统可以选择视觉传感器和力传感器等多种传感器来进行采摘任务。
工具可以根据水果的不同性质来进行选择。
1.2 控制系统设计智能水果采摘机器人的控制系统主要包括自动控制和远程控制两种模式。
自动控制模式下,机器人可以根据预设的程序自主完成采摘任务。
在远程控制模式下,操作员可以通过人机界面对机器人进行操作。
控制系统应该具有良好的灵敏度和鲁棒性,以确保机器人的稳定性和安全性。
二. 机器人制作2.1 材料选择智能水果采摘机器人的材料应该选择具有耐用性和抗腐蚀性的材料。
机械臂可以选择铝合金或碳纤维材料。
传感器可以选择高品质的视觉传感器和力传感器。
控制系统可以选择高性能的微控制器和执行器等。
同时,机器人的外壳应该具有良好的保护性能,以防止机器人遭受损坏。
2.2 制作过程智能水果采摘机器人的制作过程应该遵循一定的步骤。
首先,根据机器人的设计图纸制作所需的零部件。
然后,进行组装和安装。
在组装和安装过程中,应该特别注意各个部件之间的协调和配合。
最后,对机器人进行测试和调试,以确保其稳定运行。
三. 机器人应用智能水果采摘机器人可以被广泛应用于各个领域。
其中,最主要的是农业领域。
随着国内外市场对水果的需求不断增加,水果的种植和采摘成为一个十分重要的产业。
便携式水果采摘器的设计研究
便携式水果采摘器的设计研究随着社会的发展和人们生活水平的提高,水果已经成为人们日常饮食中不可或缺的一部分。
由于水果生长的地点和高度的限制,很多好吃的水果并不容易采摘到。
为了解决这一问题,研发出便携式水果采摘器成为了一个热门的话题。
本文将针对便携式水果采摘器的设计进行研究,并提出一些具体的设计方案。
一、市场需求分析在一些农村地区,农民在收获水果的时候,由于水果生长的高度较高,因此需要借助梯子等工具来采摘水果。
但是梯子不方便携带,而且在采摘水果的时候也存在很多安全隐患。
便携式水果采摘器也可以在这方面发挥很大的作用。
市场上存在着对便携式水果采摘器的需求,而且这个需求还将会随着人们生活水平的提高而不断增加。
二、设计原则1. 便携性:便携式水果采摘器的设计首要考虑的是便携性。
用户希望能够将采摘器轻松地放入口袋或者包中,方便携带。
2. 稳固性:在使用便携式水果采摘器的时候,用户希望能够感到采摘器的稳定性。
这样一来,用户在使用采摘器的时候能够更加轻松,也可以保障自己的安全。
3. 多功能性:在设计便携式水果采摘器的时候,可以考虑增加一些功能,比如防滑设计、高度可调等功能,来提高采摘器的实用性。
4. 轻便易用:便携式水果采摘器应该尽量减少使用者的体力消耗,让使用者能够轻松地完成采摘任务。
三、设计方案一种常见的便携式水果采摘器设计方案是由一个伸缩杆和一个夹具组成。
这种设计方案将杆子伸出来,夹具夹住水果,然后通过用户的手动操作,将水果采摘下来。
这种设计方案便携性较好,但是存在着稳定性较差,用户需要花费一定的体力来完成采摘任务的问题。
另一种设计方案是采用夹式设计,凭借装在便携式水果采摘器上的装置来将水果夹取到。
这种设计方案克服了伸缩杆稳定性不佳的问题,同时用户可以轻松地夹取到水果,省去了手动操作的麻烦。
还有一种设计方案是将便携式水果采摘器设计成一种类似于撑杆跳的结构,用户可以通过压缩弹簧的方式将水果从树上弹下来。
这种设计方案在一定程度上减小了用户的体力消耗,同时使得水果采摘更加轻松。
手持便携式水果采摘器的设计

*福建省大学生创新创业训练计划支持项目(201910389072)。
作者简介:林嘉敏(1999-),
男,本科生。研究方向:机械设计制造。
FUJIAN
NONGJI - 21 -
2019
第4期
福建农机
研究与探索
FUJIAN NONGJI
枝条的作用,易使枝条在与刃口的接触处出现切口,
块则分别卡在左右拉杆的卡槽中;拉动手柄的同时,
拉杆;上拉座通过钢丝穿过下拉座与剪切手柄铰接,
下拉座通过钢丝与翻转手柄铰接;拉杆上设有卡槽,
卡槽位置对应伸缩杆的定位孔,拉座设有上、下两通
孔,左右两个拉杆依次穿过上、下两个拉座的通孔,将
上下拉座连接起来,弹簧卡子穿过定位孔压着压杆,
压杆与拉座铰接,压杆上设有限位块,其中上压杆的
限位块置于左侧,下压杆的限位块置于右侧,该限位
零散的枝条括聚起
8. 基管;9. 翻转手柄;10. 剪切手柄;1 ,并 在 剪 切 时 避 免
施压传动部分。
或者缩短后不影响内部的传动,即可伸缩长度以适
平直刀出现滑移现象;
同时在括聚过程中由于刃口对
架;5. 固定板;6. 弹簧卡子;7. 过渡管;
齿形板;12. 伸缩杆;13. 采摘装置;14.
成。齿形板和弧形刀配合,其切削面设置有刀刃,施
压传动部分的右拉杆用钢丝牵动联动杆,进而牵动弧
传动装置环环相扣、互不干扰,巧妙高效简便地实现
采摘器在伸缩杆长度变化的情况下仍能保持刚性,同
时分别实现采摘装置的弧形刀切割和齿形板翻转这
两个功能。
形刀;弧形刀与齿形板之间使用复位弹簧连接,使弧
1
2
形刀拉动后能及时归位;
研究与探索
《2024年智能移动式水果采摘机器人系统的研究》范文
《智能移动式水果采摘机器人系统的研究》篇一一、引言随着现代农业的不断发展,智能化农业机械技术已经成为了研究热点之一。
作为现代农业生产中的重要环节,水果采摘一直依赖大量人工完成,这既耗费了大量的人力资源,又容易因天气、时间等因素影响采摘效率。
因此,开发一种高效、智能的移动式水果采摘机器人系统,成为了现代农业技术发展的迫切需求。
本文旨在研究智能移动式水果采摘机器人系统的设计原理、实现方法以及应用前景。
二、系统设计原理智能移动式水果采摘机器人系统主要由移动平台、视觉识别系统、机械臂和控制系统等部分组成。
其中,移动平台负责在果园中自主导航和移动,视觉识别系统用于识别和定位水果,机械臂则负责完成采摘动作,控制系统则负责整个系统的协调和控制。
(一)移动平台移动平台是整个系统的核心,其自主导航和移动能力是系统运行的基础。
移动平台采用轮式驱动方式,能够在复杂地形上自主行驶。
同时,移动平台配备了GPS定位系统和传感器,能够实现精确的定位和避障功能。
(二)视觉识别系统视觉识别系统是智能移动式水果采摘机器人系统的关键部分,其性能直接影响到采摘效率和准确度。
视觉识别系统采用机器视觉技术,通过图像处理和计算机视觉算法,实现对水果的自动识别和定位。
该系统能够快速准确地识别出不同种类、不同位置的水果,为机械臂的采摘动作提供准确的定位信息。
(三)机械臂机械臂是完成采摘动作的关键部分。
根据水果的特性和生长环境,机械臂采用柔性材料制成,能够适应不同形状和大小的水果。
同时,机械臂配备了力传感器和运动控制器,能够实现对水果的精准采摘和放置。
(四)控制系统控制系统是整个系统的“大脑”,负责协调和控制各个部分的运行。
控制系统采用先进的计算机技术和控制算法,能够实现自主控制、远程控制和手动控制等多种控制方式。
同时,控制系统还能够实时监测系统的运行状态和性能参数,为系统的维护和管理提供支持。
三、实现方法智能移动式水果采摘机器人系统的实现需要综合运用机械设计、电子技术、计算机技术等多个学科的知识和技术。
全国大学生机械工程创新设计大赛获奖案例《便携式水果采摘装置》
便携式水果采摘装置本案例荣获全国大学生机械工程创新设计大赛一等奖1.设计目的我国不仅是水果生产大国,同时也是第一消费国。
国民对水果旺盛的需求为果园种植业创造了巨大的市场,果园种植业具有广阔的发展前景。
传统人工釆摘的方式易造成果实损伤,同时,采摘不及时将会导致经济上的损失。
为了节约人力物力,提高果农的经济效益,开展采摘器械的研究有重要的意义。
目前普遍使用的半自动机械式釆摘器对外界环境伤害大、通用性差、操作复杂。
基于这样的研究现状,我们设计了一种新型的电动机械式采摘机。
该器械采摘时对外界环境干扰小、工作可靠方便、通用性强,适用于大多数果园种植水果的釆摘。
2.工作原理根据分离果树与果实的方式,目前大部分末端执行器大体分为两类:第一类是强行拉断果梗来实现果实与果树的分离;第二类是先用夹具加紧果实,再通过剪刀、锯条、高压水枪、激光等工具切断果梗,从而将水果从果树上釆摘下来。
第一类采摘执行末端容易拉断其他枝条,对果树的伤害较大。
而第二类采摘执行末端也存在较多缺点:其一,执行器在切断果梗之前,要先用夹具夹住果实,夹具的夹紧力很难控制,过小会导致果实脱落,过大则会损坏水果;其二,准确抓取果实对机器人视觉系统以及机械手的控制要求较高,微小的误差都会导致采摘失败。
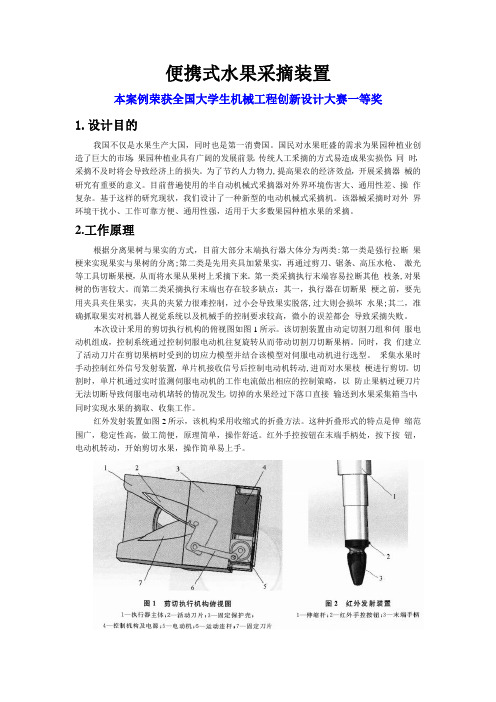
本次设计釆用的剪切执行机构的俯视图如图1所示。
该切割装置由动定切割刀组和伺服电动机组成,控制系统通过控制伺服电动机往复旋转从而带动切割刀切断果柄。
同时,我们建立了活动刀片在剪切果柄时受到的切应力模型并结合该模型对伺服电动机进行选型。
釆集水果时手动控制红外信号发射装置,单片机接收信号后控制电动机转动,进而对水果枝梗进行剪切。
切割时,单片机通过实时监测伺服电动机的工作电流做出相应的控制策略,以防止果柄过硬刀片无法切断导致伺服电动机堵转的情况发生。
切掉的水果经过下落口直接输送到水果采集箱当中,同时实现水果的摘取、收集工作。
红外发射装置如图2所示,该机构釆用收缩式的折叠方法。
便携式水果采摘器的设计研究

便携式水果采摘器的设计研究随着人们对健康与生活质量的追求,采摘新鲜水果成为了一种流行的休闲活动。
传统的水果采摘往往需要人们爬上树或者使用梯子等工具,不仅麻烦而且有一定的安全隐患。
为了解决这个问题,我们设计了一种便携式水果采摘器。
便携式水果采摘器的设计思路是将一个小型的机械臂装在一个手持设备上,通过控制按钮或者遥控器来操作机械臂的运动。
机械臂上装有一对钳子,在采摘水果时可以将钳子夹住水果,然后通过机械臂的运动将水果放入采摘袋中。
在设计便携式水果采摘器时,我们考虑了以下几个因素:1. 机械臂的灵活性:为了适应不同树木的高度和形状,机械臂需要具有一定的灵活性。
我们采用了可伸缩的材料,可以根据需要调节机械臂的长度和角度。
2. 钳子的抓力:为了确保钳子能够牢固地抓住水果,我们在钳子的设计上采用了一种特殊的材料,具有较强的抓力,同时能够保护水果的表面不受损坏。
3. 采摘袋的容量:考虑到水果的大小和数量的不同,采摘袋需要有足够的容量。
我们设计了一个可调节大小的采摘袋,可以根据需要增加或减少容量。
4. 操作的便利性:为了方便用户的操作,我们在手持设备上设置了几个按钮,可以通过按钮来控制机械臂的运动。
我们还可以通过蓝牙技术将手持设备与机械臂连接起来,通过手机等设备来遥控操作。
通过这些设计,便携式水果采摘器可以帮助人们更方便、更安全地采摘水果。
用户只需要拿起手持设备,操作机械臂即可完成采摘的过程,不需要再使用梯子等工具,大大降低了意外风险。
机械臂的灵活性和钳子的抓力可以适应不同的情况,保证了采摘的效果。
便携式水果采摘器还存在一些问题需要解决。
机械臂的重量可能会对用户的使用造成一定的负担,需要在设计上考虑减轻重量。
钳子的设计也需要进一步改进,以确保能够稳定地抓住水果。
便携式水果采摘器的设计研究是为了解决传统采摘方式带来的麻烦和安全隐患。
通过灵活的机械臂和强力的钳子,用户可以更方便、更安全地采摘水果。
还需要进一步的改进和优化,以提供更好的使用体验。
智能移动水果采摘机器人的设计
智能移动水果采摘机器人的设计智能移动水果采摘机器人的设计随着社会的不断发展,农业也迎来了新的发展机遇。
传统的种植方式已经无法满足市场需求,需要采取更加智能化的方式来提高农业生产效率。
本文就介绍一种智能移动水果采摘机器人的设计方案,为农业生产带来更多的效益。
一、设计要求智能移动水果采摘机器人是一种基于自主驾驶的机器人系统,它需要完成以下任务:1. 实现自主驾驶功能,能够自动识别种植区域,自主完成采摘任务。
2. 机器人需要具备高精度的传感器,能够检测到果实的位置、成熟度和大小等信息。
3. 机器人需要有足够的机动性,能够适应不同果树的树形结构和果实分布情况。
4. 机器人需要安装视频监控和通讯设备,以便于监控和控制机器人的运行。
二、设计原理智能移动水果采摘机器人的设计基于自主驾驶技术和机器视觉技术。
机器人安装有GPS定位系统和激光雷达传感器,能够自动识别种植区域,通过机器视觉技术检测果实的位置、成熟度和大小等信息,确定采摘点的位置和方式。
机器人采用电动驱动方式,可以通过遥控器、智能手机和电脑等方式实现对机器人的集中控制和监控。
机器人的运动方向和采摘作业的时间都可以通过程序来控制,确保机器人能够高效而准确地完成采摘任务。
三、技术特点智能移动水果采摘机器人的设计具有以下几个方面的技术特点:1. 自主驾驶智能移动水果采摘机器人是基于自主驾驶技术的机器人系统,能够自动识别种植区域,自主完成采摘任务。
采用先进的GPS定位系统和激光雷达传感器,能够实现精准的定位和导航,避免机器人对树枝和果实造成伤害。
2. 机器视觉智能移动水果采摘机器人的另一个特点是机器视觉技术。
机器人安装有高精度的传感器,能够检测到果实的位置、成熟度和大小等信息,确定采摘点的位置和方式。
这大大提高了采摘的效率和准确性。
3. 机动性智能移动水果采摘机器人还具有足够的机动性。
机器人可以自由行走在果树之间,自动适应不同果树的树形结构和果实分布情况。
同时根据机器人监测到的果实信息,可以采取不同的采摘方式,满足不同果实的采摘需求。
新型水果采摘装置的设计

【参考文献 】 l1】《机 械 原理 》西北 工业 大 学(第八 版) f2 J孙 荣创 .数控 技 术及 装备 的发 展 趋 势及 策略 UJ.中 国科技 信
2装 置设 计
图 1水 果 采 摘 装 置 示 意 图
4结语 基 于 目前 的 农业 现 状 以 及 当前 科 技 发 展情 况 .我 们 没计 了 这 款 水 果 采摘 装 置 。该 装 置 具有 环 保 节 能 的 优 点 ,还 具 有 良好 的 减 震抗 震能 力 .在 水果 采摘 过 程 中可 以 在 一 定程 度上 减 少 水 果 磕 碰 ,相 比 同 类 型 水 果 采摘 装 置 具 有 方 便 操 作 不 需要 人工 承 载 水 果 极 大 减 少 工 人 采摘 负荷 量 的 优 点 ,使 得 装 置 操作 者 可进
3装置 基 本组 成 (1)水 果 采摘 装 置 水果 采摘 装 置 由尉 形 剪 刀及 下 部 水
果漏 斗 组 成 ,主要 功能 是 同定 与采摘 水 果 、 (2)水 果传 输 装 置 采下 的 水 果经 漏 斗 进 入 柔性 管道 传
输 到车 斗 ,方 便 大量 水果 采摘 。 (3)饥 械臂 动 力装 置 : 由 慧 鱼 模 型搭 建 的 机 械臂 辅 助 气
42 II:辑 ;鬣 20 l7{卜第1【)!{JJ
通 过 查 阅 资 料 发 现 现 有 的 水 果 采摘 器 械 过 于简 单 , 多为 杆 状 手持 器 械 .增 加 了 使 用 者 的 负 担 及 手 部 、眼 部压 力 . 不能 很 好地 减轻 使 用 者的 工 作 量 ,于 是 我 们 决 定 采用 车体 设计 ,即 将 水 果 采摘 装 置 以车 的形 式 出 现 ,并 设 有 水 果 采摘 后 的收 纳 箱 以 便可 以 一 次 采取 可 观 数 量 的 水 果 ,克 眼 了,传统 人工 采摘 单 人 承 载 量 少 的缺 点 、车 中 采 用气 动 装 置 为 采摘 装 置提 供 动 力 .在 采 摘机械手下方 没置 引导软管 ,尽量减少水果在到达收纳 箝之前 的 磕 碰 .收 纳 箱 内也 进 行 缓 冲 防 震 设 汁 ,防止 采摘 运 输 过 程 中 对 已 采摘 水 果造 成二 次 伤 害 进 行 防 碰 撞 没 计 以 免 降低 优 质 果 量 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
手持式水果辅助采摘器的设计张纬哲;张斌;黄稼元【摘要】通过对果树高处橘子、苹果、梨和桃子等水果辅助采摘的功能要求分析,确定了辅助采摘器实现方案的功能结构分解,进而设计了由调节杆、采摘及收纳等3个功能结构模块组成的手持式水果辅助采摘器.调节杆模块用于采摘器长度和角度的调节,采摘模块用于水果的捕获、果柄定位与剪切,收纳模块用于果实收纳.样机实验表明,该机能克服现有水果辅助采摘器性能的不足,适宜于果农在实际作业中应用.%Through the analysis of the functional requirements of fruit-assisted picking of oranges, apples, pears and peaches in fruit trees, the functional structure decomposition of the auxiliary picker implementation scheme was determined, and a three functional structures module including adjustment rods, picking and storage were designed. The adjusting rod module is used for adjusting the length and angle of the picker, the picking module is used for fruit capturing, the handle positioning and cutting, and the storage module is used for fruit storage. The prototype experiment shows that it can overcome some of the shortcomings of the existing fruit-assisted picker, and it can be suitable for the practical application of fruit farmers in the operation.【期刊名称】《新疆农机化》【年(卷),期】2018(000)006【总页数】3页(P15-17)【关键词】水果;采摘器;手持式;设计【作者】张纬哲;张斌;黄稼元【作者单位】江西理工大学,江西赣州 341000;江西铜业集团公司德兴铜矿,江西赣州 341000;杭州电子科技大学,江西赣州 341000【正文语种】中文【中图分类】S225.930 引言随着人们生活水平的不断提高,柑子、橘子、梨、苹果、桃子及石榴等水果需求量增大,种稙面积越来越大。
这些长在较高果树上的水果,国内果农仍较多地采用传统的人手采摘,但由于身高限制,往往需要借助梯子,或爬上果树进行采摘作业,从而劳作效率低,对人和果树存在着一定的安全作业风险。
目前,为了提高水果的采摘效率,国外已研制出了一些大型的果树机械采摘装备[1-2]。
这些大型机械采摘装备对果园的地面平整度有一定的要求,较适用于大型平原地带的果园采摘,而对于小型或地形高低不平等环境复杂的果园不适宜。
为提高小型或地形复杂果园的果树采摘效率,市场上也已出现了一批手动或电动的水果辅助采摘器,如爪式采摘手[3]和剪式采摘手[4]等,这些辅助采摘手在一定程度上解决了果树采摘的安全性与便利性问题。
但仍存在着水果采摘捕获定位操作较困难,或果柄拉拽式折切易造成水果损伤,或采摘后水果收纳的效率较低等问题,难以在生产中得到较好的推广。
此外,针对不同类型的水果采摘,很多科研院校正在研制各类智能水果采摘器[5-6],但目前基本上仍处于实验研制阶段。
为此通过调研,本项目组设计了一款手持式果树辅助采摘器,以克服现有水果辅助采摘器性能的不足,满足实用化的需求。
1 功能要求与结构分解1.1 功能要求分析本文所涉及的水果辅助采摘器,相当于人手的延伸。
因此,对照人手采摘水果步骤,其具有的功能主要有:(1)采摘器能够调整长度与角度,以便够着果树上较高的水果;(2)水果捕获抓取功能,以便后续的水果剪切定位;(3)果柄定位功能,使果柄定位于剪刀工作范围内;(4)果柄剪切功能,剪切刀锋利,剪切用力小;(5)果实收纳功能。
既要保证收纳效率,也不能造成果实损害。
此外,考虑到野外的作业场所和生产成本,辅助采摘器所有功能结构的驱动均采用人工手动操作。
因此,其结构需具有轻巧和易操作的人机工程要求。
1.2 功能结构分解根据上述采摘流程步骤,为实现辅助采摘器的功能要求,采摘器总体按调节杆模块、采摘模块及收纳模块进行功能结构的模块分解。
其中,调节杆模块用于采摘器长度和角度的调节,采摘模块用于水果的捕获、果柄定位与剪切,收纳模块用于果实收纳。
其功能结构分解及对应的采摘流程功能见图1。
图1 采摘器功能结构与采摘流程分解示意2 结构设计根据采摘器功能与结构分解,设计的采摘器总体结构见图2。
其主要由调节杆、采摘及收纳3个功能模块组成。
其中,调节杆模块主要由伸缩杆和角度调节头组成,角度调节头与采摘模块连接;采摘模块主要由果实捕获机构、果柄定位机构及剪切机构组成;收纳模块主要由收纳器与收纳箱组成,收纳器与采摘模块连接,果实通过收纳器进入地面的收纳箱。
3个功能模块结构中,采摘模块是采摘器的主体,因而是采摘器设计的重点与关键模块。
图2 辅助采摘器总体结构设计1.采摘模块2.调节杆模块3.收纳模块2.1 调节杆模块调节杆模块结构见图3。
其伸缩杆用于辅助采摘器的长度调节,主要根据人机工程学原理,对市场上现有众多的长度调节杆进行选型设计;角度调节头见图4,用于采摘模块采摘时的角度调节,由上、下调节块组成,分别与采摘模块、调节杆固定连接。
上、下调节块通过螺栓螺母连接,旋松螺母,即可调整上、下调节块的相对角度,即调整采摘模块与调节杆之间的相对角度。
图3 调节杆模块结构1.采摘模块2.角度调节头3.伸缩杆调节头图4 角度调节头结构1.调节螺栓2.调节头固定螺栓3.角度调节头2.2 采摘模块采摘模块结构见图5,由水果套取捕获机构、果柄索定位机构及果剪式剪切机构组成。
图5 采摘模块设计1.果实套取捕获环机构2.果柄索定位机构3.果剪式剪切机构4.动力传递索5.末端滑动套6.定位索现有的爪式采摘手和剪式采摘手均存在着果实捕获较为困难,果实易损伤、且结构较为复杂等不足。
为此,本设计中,果实捕获采用圆环套取方案。
由于套取环内径较大,相对来讲,果实捕获较易;捕获中,由于套取环无需与果实接触,也就不易对果实造成损伤;同时,套取环结构非常简单,易制作,成本低。
实际应用中,套取环还可以做出内径不同的系列,以适应不同的水果。
水果被捕获后,将果柄剪切,水果才能采摘下来。
套取环捕获水果后,水果的果柄不一定正好定位在果剪的工作范围内,因此,需要有定位机构将果柄定位到果剪的工作范围中。
本设计中,采用索定位的机构方案(图5),其主要由定位索、末端滑动套等组成。
定位索设计为弹性索,初始状态时,前端定位索位于捕获套取环的索槽中,后端与末端滑动套连接,末端滑动套安装在调节杆上。
当水果套取捕获后,操作人员一只手拉动末端滑动套,定位索收缩,将果柄拉入定位到果剪工作范围内,果柄剪切后,松开末端滑动套,定位索在自身的弹性作用下,恢复到初始状态。
果柄剪切采用果剪式剪切机构方案(图5)。
其主要由果剪刀头、动力弹性传递索及末端握把等构成。
果剪刀头设有复位弹簧;动力弹性传递索一端与果剪柄连接,另一端与末端握把连接;末端握把安装在调节杆上。
初始状态时,果剪两刀片张开;果柄剪切作业时,握捏末端握把,通过传递索,果剪两刀片啮合,剪切果柄;果柄剪切后,松开末端握把,动力传递索复原,果剪两刀片在复位弹簧作用下,回复到初始的张开状态。
2.3 收纳模块收纳模块结构设计见图2,收纳模块主要由波纹式果实收纳网与收纳箱组成,收纳网上端与采摘模块的果实套取环连接,果实通过收纳网下滑至地面的收纳箱。
收纳网为中空弹性节状网兜,果柄剪切后的果实在重力作用下,因网兜弹性波纹节的作用,能有效阻缓自由落体运动,从而防止果实滑落过程中引起的较大碰撞,造成果实损伤。
3 小结经调研、功能需求分析与设计后,对设计的辅助采摘器进行了制作与采摘试验(图6)。
试验表明,所设计的辅助采摘器,能轻易地捕获果树高处的水果,果柄定位与剪切操作简便、效果佳,水果收纳简单且不易损伤水果,克服了现有水果辅助采摘器性能的不足,实现了设计的功能目标要求。
此外,所设计的辅助采摘器成本极为低廉,非常有利于今后在果园的推广应用。
图6 样机采摘试验参考文献:【相关文献】[1]SandersK F,Orange Harvesting SystemsReview[J].Biosystems Engineering,2005,90(2):115-125.[2]Torregrosa A,et al.,Mechanical harvesting of oranges and mandarins inSpain[J].Biosystems Engineering,2009,(104):18-24.[3]段文婷,何家成,彭铜杰等.便携电动式水果采摘机设计[J].中国农机化学报,2015,(1):48-49,58.[4]周燕,冯宇鹏,李炎林等.手持式电动水果采摘机设计[J].安徽农业科学,2013,(25):10 557-10 559.[5]钟厦.农业智能机器人水果采摘优化控制模型仿真[J].计算机仿真,2015,(4):290-294[6]顾宝兴,姬长英,王海青等.智能移动水果采摘机器人设计与试验[J].农业机械学报,2012,(6):153-160.。