位置度标注及测量
位置度标注及测量

在绝对位置标注法中,位置度误差是以产品或零件的几何中心为基准进行测量 的。这种方法适用于产品或零件的位置度误差相对于一个固定的参考点或坐标 系有明确要求的情况。
相对位置标注法
总结词
相对位置标注法是一种将产品或零件 的位置度误差相对于其他产品或零件 的位置进行标注的方法。
详细描述
在相对位置标注法中,位置度误差是 以其他产品或零件的位置为基准进行 测量的。这种方法适用于需要比较不 同产品或零件之间位置度误差的情况。
坐标测量机技术通过接触被测物体的 表面来获取测量数据,具有较高的测 量精度。
静态测量
结构稳定
坐标测量机技术具有结构稳定的特点, 能够保证长期的测量精度。
坐标测量机技术适用于静态测量,能 够实现高精度的测量。
摄影测量技术
非接触测量
摄影测量技术通过拍摄被测物体的照片来获取测量数据,不需要 接触被测物体,具有非接触测量的优点。
通过机器视觉技术进行自动识别和定位,能够实现快速、准确的位置度测量,提高测量 效率。
人工智能技术
利用人工智能技术对测量数据进行处理和分析,能够实现智能化测量,提高测量精度和 可靠性。
测量技术的集成与融合
多传感器融合技术
将不同传感器进行集成和融合,能够实现多源数据的 互补和优化,进一步提高位置度测量的精度和可靠性 。
位置度标注的标准和规范
国际标准
如ISO 5459等国际标准规 定了位置度标注的方法和 要求。
国家标准
各个国家会制定相应的国 家标准,规范位置度标注 的具体实施。
企业标准
部分企业会根据自身生产 特点和需求,制定更为详 细的位置度标注规范。
02
CHAPTER
位置度标注的方法
关于安装孔位置度的标注方法和计算
时
即: 连接件1通孔的置度度公差值T1为
连接件2螺孔的位置度公差值T2为
连接件2螺孔的垂直度公差值S为 标注方法: 连接件1 通孔的标注方法如图1 ; 连接件2 螺孔的标注方法如图1 。
3 、 延伸公差带 通孔和螺孔的实际中心线虽在位置度公差值范围内, 但产生了较大的倾斜后
有可能会影响到螺钉的拧入。为了保证在此情况下螺钉仍能顺利地通过通孔, 对螺孔的位置度可采用延伸公差带。延伸公差带, 就是将螺孔位置度公差带沿 其理想位置, 自零件实体移至被测要素长度界限以外。
为了便于计算位置度公差值, 可根据图4 的极限状况画出尺寸联系图如图5。
图中: OO—理想正确的通孔中心线位置; O1O1、O2O2—连接件l、2 上孔的实际中心线极限位置; D 1min、D2min—连接件l、2 上安装孔的最小极限直径;
且一般取: D 1min=D2min=Dmin; dmax —螺栓最大极限直径; T —两连接件孔的位置度公差值。
1、 缩小位置度的公差值 与螺栓连接时相同, 为了计算位置度公差值, 可根据图7 画出尺寸联系图, 如图8。
从图8 得:
而:
一般情况下L1二L2 即A=T 代入得: 即: 螺钉连接时, 连接件l 的通孔和另件2 的螺孔的位置度公差值T 均为:
位置度标注方法仍如图1。
2、 连接件2螺孔附加垂直度公差 螺孔的附加垂直度公差, 使螺孔中心线倾斜后的延伸部分不超过通孔泣置度公差值 范围, 如图9 所示。
一、 孔组位置度的常规标注方法及含义
1、 位置度的标注方法
孔组位置度的标注方法如图1。图1 是通孔、螺孔等位置度最常用的标注方式。
2、 位置度的含义 如图2 所示为按理论正确尺寸确定的四孔理想中心线. 规定四孔实际中心线分别
位置度标注及测量

位置度公差基本原则
位置度公差是各实际要素相互之间或它们相对一个或多个基准位置允许的变动 全量 在位置度公差标注中用理论正确尺寸及位置度公差限制各实际要素相互之间或 它们相对一个或多个基准位置,位置度公差相对理想位置为对称分布 位置度公差可用于单个的被测要素,也可用于成组的被测要素,当用于成组的被测 要素,位置度公差应同时限定成组的被测要素中的每一个被测要素
位置度误差测量条件
测量条件: 标准测量力为零 标准测量温度20度
由于偏离标准条件而引起较大测量误差 时,应进行测量误差估算
位置度公差评定原则
最小条件:被测实际要素对理想要素的最 大变 动量最小
理论正确尺寸的标注
1.确定成组要素中各要素间的 理论正确位置 2.确定各要素之间及相对基准 的理论正确位置
基准注法
2.注出一个基准确定理想要素(或几何图框)的位置 (中心要素基准)
基准中心要素确 定两孔的理想位 置
公差带为到理想位置(A&25) 的圆柱(最大偏移的2倍为直 径)
基准注法
一.注出一个基准确定理想要素(或几何图框)的位置 (圆周方向基准)
基准平面A确定 四孔在圆周方向 上的理想位置
基准注法
基准注法
一.注出一个基准确定理想要素的方向) 确定垂直关系
公差值为轴线上.下 圆心到理想位置的 最大偏移的2倍
几何图框轴线 方向与平面上两 基准无关,可以 有利公差最小考量
三孔孔组组成 的几何图框
基准注法
一.注出一个基准(确定理想要素的方向)
确定平行关系 公差为轴线在平行A方向 上到理想位置的最大偏移 的2倍为直径的圆柱
基准标注总结
三坐标测量位置度的方法及注意事项
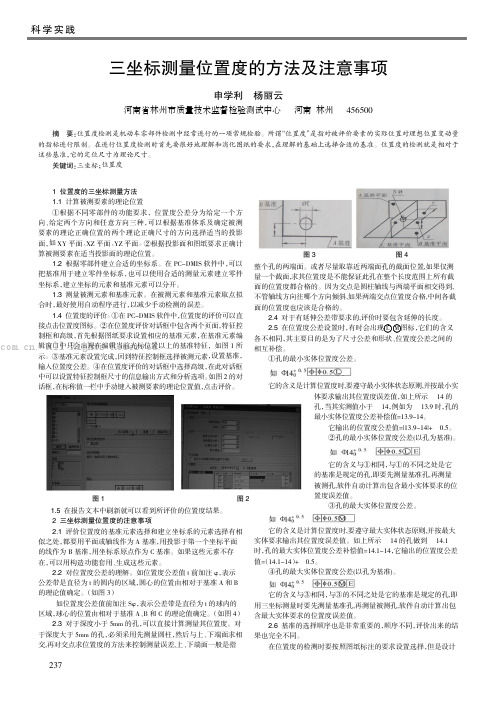
1位置度的三坐标测量方法1.1计算被测要素的理论位置①根据不同零部件的功能要求,位置度公差分为给定一个方向、给定两个方向和任意方向三种,可以根据基准体系及确定被测要素的理论正确位置的两个理论正确尺寸的方向选择适当的投影面,如XY 平面、XZ 平面、YZ 平面。
②根据投影面和图纸要求正确计算被测要素在适当投影面的理论位置。
1.2根据零部件建立合适的坐标系。
在PC-DMIS 软件中,可以把基准用于建立零件坐标系,也可以使用合适的测量元素建立零件坐标系,建立坐标的元素和基准元素可以分开。
1.3测量被测元素和基准元素。
在被测元素和基准元素取点拟合时,最好使用自动程序进行,以减少手动检测的误差。
1.4位置度的评价。
①在PC-DMIS 软件中,位置度的评价可以直接点击位置度图标。
②在位置度评价对话框中包含两个页面,特征控制框和高级,首先根据图纸要求设置相应的基准元素,在基准元素编辑窗口中只会出现在编辑当前光标位置以上的基准特征,如图1所示。
③基准元素设置完成,回到特征控制框选择被测元素,设置基准,输入位置度公差。
④在位置度评价的对话框中选择高级,在此对话框中可以设置特征控制框尺寸的信息输出方式和分析选项。
如图2的对话框,在标称值一栏中手动键入被测要素的理论位置值,点击评价。
1.5在报告文本中刷新就可以看到所评价的位置度结果。
2三坐标测量位置度的注意事项2.1评价位置度的基准元素选择和建立坐标系的元素选择有相似之处,都要用平面或轴线作为A 基准,用投影于第一个坐标平面的线作为B 基准,用坐标系原点作为C 基准。
如果这些元素不存在,可以用构造功能套用、生成这些元素。
2.2对位置度公差的理解。
如位置度公差值t 前加注φ,表示公差带是直径为t 的圆内的区域,圆心的位置由相对于基准A 和B的理论值确定。
(如图3)如位置度公差值前加注Sφ,表示公差带是直径为t 的球内的区域,球心的位置由相对于基准A 、B 和C 的理论值确定。
面的位置度测量方法
面的位置度测量方法全文共四篇示例,供读者参考第一篇示例:面的位置度是指一个面相对于其参考面的位置偏移程度的度量。
在工程领域,面的位置度测量是一项非常重要的质量控制工作,它可以确保产品的外观和性能达到设计要求。
本文将介绍面的位置度测量的方法和步骤,帮助读者更好地理解和应用这一技术。
一、面的位置度测量的意义在制造过程中,面的位置度测量可以帮助我们了解产品各个面的位置情况,以及它们与参考面之间的偏移程度。
通过合理地设置面的位置度检测任务,可以避免制造过程中出现尺寸偏差、装配问题等质量问题,确保产品的准确性和一致性。
面的位置度测量还可以为产品的后续加工、使用和维护提供准确的参考数据,提高产品的使用寿命和性能。
1. 光学测量法光学测量法是一种常用的面的位置度测量方法,它通过光学仪器测量面的表面特征和位置,得出面相对于参考面的偏移情况。
在进行光学测量时,需要使用适当的光学仪器,如光学显微镜、激光测距仪等。
通过在不同角度和位置对面进行光学测量,可以获取面的位置度数据,并进行分析和验证。
2. 接触式测量法3. 数字化测量法1. 确定面的位置度测量任务在进行面的位置度测量时,首先需要明确面的位置度测量任务的具体要求和目标。
确定要测量的面的数量、位置和尺寸范围,选择合适的测量方法和仪器,制定详细的测量方案和步骤。
2. 准备测量仪器和工具在进行面的位置度测量之前,需要准备好相应的测量仪器和工具。
根据面的位置度测量任务的要求,选择合适的光学仪器、接触式传感器或数字化测量仪器,确保其正常运行和准确度。
4. 处理和分析测量数据完成面的位置度测量后,需要对测量数据进行处理和分析。
通过使用专业的测量软件或工具,处理和分析测量数据,得出面相对于参考面的偏移情况,进行数据校核和验证。
5. 制定改进措施和方案根据面的位置度测量结果,制定改进措施和方案。
对于存在偏差和问题的面,及时进行调整和改进,确保产品的位置度符合设计要求,提高产品的质量和性能。
位置度﹑平面度的定义﹑标注及测量

二﹑公差基礎知識
基准符號﹑形位公差符號的放置﹕ 2﹑形體的延長線 3﹑尺寸的延長線
尺寸線的延長 線
形體的延長線
二﹑公差基礎知識
(三)公差的分類 1﹑尺寸公差﹕控制形體大小 2﹑形狀公差﹕包括直線度﹑平面度﹑圓度﹑ 圓柱度﹑線輪廓度﹑曲面輪廓度 3﹑位置公差﹕包括定位公差(位置度﹑對稱 度﹑同心度)﹑定向公差(傾斜度﹑平行 度﹑垂直度)﹑跳動公差(圓跳動﹑全跳 動)
三﹑位置度的標注與測量
(二)位置度的三要素 1.基准﹔ 2.理論位置值﹔ 3.位置度公差
三﹑位置度的標注與測量
(三)位置度公差帶 位置度公差帶是一以理論位置為中心對稱的區域。
位置度公差帶
三﹑位置度的標注與測量
(四)位置度的標注與測量 4-1.0.6 B-T-B CONN W/POST(M) 40P位置度標注 與測量
二﹑公差基礎知識
2-2.最小实体原则﹕测量时取被测要素的最小 实体的公差原则﹔
二﹑公差基礎知識
2-3.包容原则﹕使实际要素处处位于理想形状的 包容面之内的公差原则。应用包容原则时﹐其形 位公差数值随着实际形体尺寸的变化而变化。 以0.6 B-T-B CONN W/POST 40P(M)的孔规设 计为例﹐其端子公差如下所示﹕
BASE
D1
D2ቤተ መጻሕፍቲ ባይዱ
Da
Dt
T
判定
2
3
4
5
三﹑位置度的標注與測量
4-2.IDE 44P垂直位置度標注與測量
如圖﹐IDE 44P端子在垂直方向上具有以下特點﹕排 數少(只有兩排)﹐每排端子數量多(達22PIN)﹐ 長度值為端子材厚值﹐對于不同的端子﹐其值差異 極小﹐因此我們可把上排端子和下排端子分別看成 兩個整體。下面以下排端子為例介紹其測量方法。
《位置度平面度测量》课件
置度和平面度是工程测量中非常重要的指标,对于保证工件精度和质量起到至关重要的作用。 本课件将介绍位置度和平面度的定义,测量方法以及其在工业制造中的重要性。
什么是位置度和平面度
位置度是衡量一个工件对于理想位置的偏差程度的指标,而平面度则是表征一个工件表面平整度的指标。 准确测量位置度和平面度可以帮助我们评估工件的精度和质量。
综合测量实例
通过一个具体的测量实例,展示位置度和平面度的综合测量过程。 介绍实例的背景以及关键的测量步骤。 对数据进行处理和分析,以得到准确结果。
总结
位置度和平面度的重要性超出我们的想象。 良好的测量技术能够提高工业制造的质量和效率。 学习并掌握位置度和平面度测量技术将对个人职业发展带来巨大帮助。
位置度测量
位置度的定义是工件与其理想位置之间的距离或偏差。 位置度测量可以通过使用测量具和遵循一定的测量步骤来完成。 测量过程中的误差应注意,并采取相应的解决方法。
平面度测量
平面度是工件表面平整度的测量指标。 请使用适当的测量工具,并按照一定的测量步骤进行平面度的测量。 在测量过程中,需注意误差的处理和解决方法。
位置度的三坐标测量方法的实践
位置度的三坐标测量方法的实践一、设备准备要进行位置度的三坐标测量,首先需要准备以下设备:1.三坐标测量机:三坐标测量机是一种用于测量物体在三维空间中位置的专用设备。
它由工作台、测量探头和计算机系统组成。
2.测量夹具:测量夹具是用于固定待测物体的装置。
它能够保证物体在测量过程中的稳定性,以减小误差。
3.计算机软件:三坐标测量机一般需要连接计算机,并安装相应的测量软件。
该软件用于控制测量机的运动和进行数据的处理。
二、测量步骤进行位置度的三坐标测量需要按照以下步骤进行:1.设定工件坐标系:在测量前,需要确定工件坐标系的原点和坐标轴方向。
一般情况下,原点位于工件的一些特定位置,坐标轴方向可以根据实际需要确定。
2.定位工件:使用测量夹具将待测工件固定在测量机的工作台上,确保工件的稳定性和准确度。
3.设置测量参数:根据待测物体的形状和尺寸,设置测量机相应的参数,如探头的类型、测量精度等。
4.执行测量程序:在计算机上打开相应的测量软件,并选择合适的测量程序。
执行程序后,测量机将自动进行测量操作。
5.分析测量数据:测量完成后,软件将自动生成一系列测量数据,包括坐标、长度、角度等。
使用相应的分析工具,对数据进行处理和分析,以获得最终的测量结果。
6.结果报告:根据测量结果,生成详细的测量报告。
报告应包括测量数据、误差分析、测量精度等内容,以便后续处理和验证。
三、注意事项在实际测量过程中,需要注意以下问题:1.温度和湿度:三坐标测量机对环境温度和湿度有一定的要求。
在测量前,应确保测量环境的温度和湿度在规定范围内,以避免误差的产生。
2.参考标准:在测量过程中,需要使用参考标准来校准测量机和测量夹具。
参考标准应具有稳定的尺寸和几何形状,并经过有效的校准和检验。
3.用户培训:三坐标测量机的操作较为复杂,对用户的技术要求较高。
在使用三坐标测量机前,用户应接受相应的培训和指导,熟练掌握测量机的操作方法和注意事项。
四、实际应用位置度的三坐标测量方法广泛应用于工程、制造、建筑和地理领域中的精确定位和测量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
位置度误差测量条件
测量条件:标准测量力为零 标准测量溫度20度
由於偏离标准条件而引起较大测量误差 时,应进行测量误差估算
位置度公差评定原则
最小条件:被测实际要素對理想要素的最大变 动量最小
理论正确尺寸的標注
1.确定成组要素中 各要素间的理论正确位置
2.确定各要素之间及 相对基准的理论正确位置
位置度标注及测量
讲师:井胜利
一:位置度的定义 二:位置度的分类 三:位置度的测量
定义:
是指被测实际要素对其具有理想位置的理 想要素的变动量
注: 理想要素的理想位置由基准和理论尺寸 确定(即由几何图框及其位置确定)
位置度的分类:
单一要素的位置度误差 成组要素的位置度误差
由于其是一个定位误差。因而分为以下三种方式
公差注法
一.给定方向 A.一个方向 (平行.垂直)
公差帶是距离为公差值, 以理想位置为中心对称分布 的兩平行直线(或平面)间的 区域
公差注法
一.给定方向
B.二个方向
公差帶是正剖面为 公差值t1*t2,以理 想位置为中心对称 分布的一四棱柱区 域
公差注法
二.任意方向 .平面上点的任意方向
公差帶是直徑為公差值t, 以理想位置為中心的圓 內的区域
(1) 坐标测量法 (2) 综合量规检验
面的位置度误差的测量
其是指:包容被测实际斜面,且相对基准端 面、基准轴线和理论正确角度所确定的定 位最小包容区域的宽度。
THE END
THANKS!
在公差框格內采用 0 M (或0 L )形式 標注
A.采用相关原则的位置度公差注法
A.2 公差采用最大实体原则 A.3 基准要素采用最大实体原则 基准要素相对基准
公差相对被测要素
C.位置度公差混合注法
C1. 尺寸公差.位置度公差混合注法
C. 位置度公差混合注法
C2. 角度公差.位置度公差混合注法
2.四孔孔组几何图框可平 移或转动,使包容圓柱直 径最小
3.包容圓柱直径最小的几
基准标注总结
1.可以注出:一个基准,二个基准,三个基准 2.也可使用成组要素基准
3.基准可以是轮廓基准.中心要素基准.圓周要素基准 4.基准视情況可确定理想要素的方向或位置.
A.采用相关原则的位置度 公差注法
A.1 采用关联包容原则
二. 三基面体系的建立成的三基面体系确
定四孔的理想位置
第二基准
第三基准
第一基准
基准注法
三. 注出成组要素基准
四孔孔组与外侧边有功能 关系,以基准平面B,A构成 的基准体系确定四孔孔组 的理想位关系,而八孔孔 组与四孔孔组有直接的功 能关系,故以四孔孔组的位关 系(与基准平面B,A的理论 正確尺寸无关)的四个圓 柱面分別包容各实际轴线
位置度的评定与测量
1:点位置度的测量: 其是指包容被测实际点,由基准表面(或) 直线和理论正确尺寸确定的定位 最小包容 区域的直径。
公式:
∮f=2 (x2-x1)2+(y2-y1)2
2:线位置度的测量
其是指:包容被测实际直线(或轴线)对基 准直线(基准面)和理论正确尺寸所确定的
定位最小包容的宽度或直径。 测量方法:
基准注法
2.注出一個基准确定理想要素(或几何图框)的位置 (中心要素基准)
基准中心要素 確定兩孔的理 想位置
公差帶为到理想 位置(A&25)的圓柱 (最大偏移的2倍为直徑)
基准注法
一.注出一個基准确定理想要素(或几何图框)的位置
(圓周方向基准)
基准平面A确 定四孔在圓周 方向上的理想 位置
基准注法 基准平面Z,B,A,构
几何图框可平行于 基准在9.5~10.5mm 之間上下浮动, (轴线方向确定)
三孔孔组 几何图框
位置度公差注法
一.注出一個基准确定理想要素(或几何图框)的位置
(轮廓基准) 基准平面A确 定兩孔在垂直 方向上的理想 位置
公差為轴线在平行 A方向上到理想 位置(15&40)的最大 偏移的2倍为直徑的 圓柱
(1)用理论正确尺寸定位 (2)用尺寸公差定位 (3)用复合位置度定位
位置度公差基本原则
位置度公差是各实际要素相互之間或它們相对 一个或多个基准位置允许的变动全量
在位置度公差标注中用理论正确尺寸及位置度 公差限制各实际要素相互之間或它們相对一个 或多个基准位置,位置度公差相对理想位置为对
称分布 位置度公差可用于单个的被测要素,也可用于 成组的被测要素,当用于成组的被测要素,位置度 公差应同时限定成组的被测要素中的每一个被
公差注法
二.任意方向 .空間點的任意方向
公差帶是球直徑為公差值t, 以理想位置為球心的球 內的区域
公差注法
二.任意方向 .轴线的任意方向
公差帶是直径为公差值t, 以理想位置为圓心的圓柱內 的區区域
公差注法总结
位置度公差区域可以是: 兩平行直线(平面)区域 圓內区域 圓柱区域 四棱柱区域 球內区域
基准注法 三孔孔组组成 的几何图框 一.注出一个基准确定理想要素的方向)
确定垂直关系
公差值为轴线上.下 圓心到理想位置的 最大偏移的2倍
几何图框轴线 方向与平面上兩 基准无关,可以 有利公差最小考量
基准注法
一.注出一个基准(确定理想要素的方向)
确定平行关系 公差为轴线在平行 A方向上到理想 位置的最大偏移的2倍 為直徑的圓柱