大疆御操作指南()
大疆御2无人机参数配置
工作频率
发射功率
FCC:≤26dBm
CE:≤20dBm
SRRC:≤20dBm
MIC:≤20dBm
FCC:≤26dBm
CE:≤14dBm
SRRC:≤26dBm
其它性能
机载内存
8GB
APP控制
支持
尺寸
折叠:214×91×84mm,展开:322×242×84mm
重量
907g
5级风
工作环境温度
-10°C-40°C
卫星定位模块
GPS+GLONASS
相机
内置相机
是
像素
2000万有效像素
影像传感器
1英寸CMOS
镜头
视
对焦点:1m至无穷远(带自动对焦)
快门速度
电子快门:8-1/8000s
ISO范围
视频:100-6400
照片:100-3200(自动),100-12800(手动)
照片最大分辨率
5472×3684
照片拍摄模式
单张拍摄
多张连拍(BURST):3/5张
自动包围曝光(AEB):3/
定时拍摄(间隔:2/3/5/7/10/15/20/30/60秒,RAW:5/7/10/15/20/30/60秒)
图片格式
JPEG/DNG(RAW)
视频拍摄
支持
视频最大分辨率
4K: 3840×2160 24/25/30p
大疆御2无人机参数配置(总3页)
大疆御
详细参数
飞行器
型号
“御”Mavic 2专业版
无人机类型
消费级无人机,准专业无人机
动力系统
电动
轴距
354mm
飞行时间
大疆精灵3专业版使用说明
大疆精灵3专业版使用说明一、组装飞行器与准备工作................................................................ 错误!未定义书签。
二、遥控器的使用.................................................................................. 错误!未定义书签。
三、DJI GO app界面 ............................................................................ 错误!未定义书签。
四、控制飞行器....................................................................................... 错误!未定义书签。
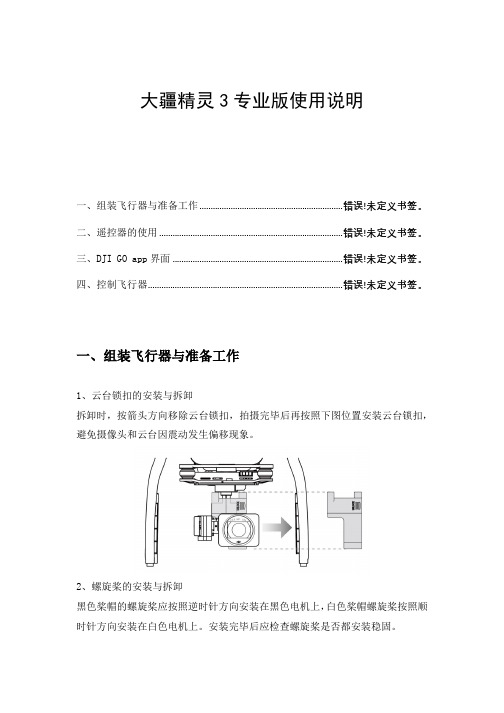
一、组装飞行器与准备工作1、云台锁扣的安装与拆卸拆卸时,按箭头方向移除云台锁扣,拍摄完毕后再按照下图位置安装云台锁扣,避免摄像头和云台因震动发生偏移现象。
2、螺旋桨的安装与拆卸黑色桨帽的螺旋桨应按照逆时针方向安装在黑色电机上,白色桨帽螺旋桨按照顺时针方向安装在白色电机上。
安装完毕后应检查螺旋桨是否都安装稳固。
3、智能电池的安装与拔出将电池以正确的方向推入电池仓,直到“咔”的一声,以确保电池卡紧在电池仓内。
如果电池没有卡紧,有可能导致电源接触不良,可能会影响飞行的安全性,甚至无法起飞。
在拔出电池时,应用手指紧按锁扣往外用力拔出,新机器可能会比较费力。
4、遥控器与移动设备的安装首先将遥控器的天线和移动设备支架展开,按下移动设备支架侧边的按键以伸展支架,放置移动设备后调整支架确保夹紧移动设备。
再使用USB数据线连接移动设备与遥控器后方的USB接口,打开DJI GO app。
二、遥控器的使用遥控器根据习惯方式分为美国手和日本手,可在DJI GO app内进行设置,大疆精灵3专业版的出场默认设置为美国手,也建议大家使用美国手。
大疆稳定器se按键说明
大疆稳定器se按键说明大疆稳定器SE是一款专业级的手持稳定器,具有出色的稳定性和易用性。
它采用了先进的三轴稳定技术,可以帮助用户拍摄平滑、清晰的视频。
在使用大疆稳定器SE时,按键是非常重要的操作方式之一。
下面将详细介绍大疆稳定器SE的按键功能和使用方法。
一、开关机按键大疆稳定器SE的开关机按键位于手柄上方,通过长按该按键3秒即可开机或关机。
在开机过程中,指示灯会闪烁数次表示设备正在启动。
当指示灯常亮时,表示设备已经开机成功。
二、模式切换按键1. 单击模式切换按键:单击该按键可以切换不同的工作模式。
2. 双击模式切换按键:双击该按键可以重新校准水平。
三、拍摄控制按键1. 拍摄控制按钮位于手柄正面,在拍摄过程中非常重要。
2. 单击该按钮可以开始/停止录像。
3. 长按该按钮2秒后松开,相机会进行连拍操作。
四、方向控制杆方向控制杆位于手柄上方,用于控制相机的运动方向。
1. 上下滑动:控制相机的俯仰角度。
2. 左右滑动:控制相机的水平旋转角度。
五、焦距调节滚轮焦距调节滚轮位于手柄右侧,用于调节相机的焦距。
1. 向前滚动:放大镜头焦距。
2. 向后滚动:缩小镜头焦距。
六、指示灯大疆稳定器SE配备了多个指示灯,用于显示设备的工作状态和电池电量。
1. 电量指示灯:在开机状态下,通过不同颜色的指示灯来显示电池电量。
绿色表示电量充足,黄色表示电量中等,红色表示电量低。
2. 工作状态指示灯:在设备工作过程中,指示灯会闪烁不同颜色来显示不同状态。
比如蓝色表示设备正在进行校准,白色表示设备正常工作。
七、手机连接按键大疆稳定器SE支持将手机与设备进行连接,以便实时查看拍摄画面和进行参数设置。
手机连接按键位于手柄左侧。
1. 单击手机连接按键:单击该按键可以将手机与设备进行连接。
2. 长按手机连接按键:长按该按键可以断开手机与设备的连接。
八、固定螺丝孔大疆稳定器SE的底部配备了一个固定螺丝孔,可以用来安装扩展配件,如三脚架或其他附件。
大疆御操作指南

大疆御操作指南大疆御操作指南本文档提供了详细的大疆御系列产品的操作指南,包括御Mavic、御Spark、御Phantom等。
以下将分为多个章节介绍每种产品的相关操作步骤和注意事项。
一、御Mavic操作指南1:准备工作a:检查无人机及遥控器电池电量b:安装方式或平板设备并连接遥控器c:连接无人机和遥控器2:起飞和降落a:解锁无人机b:调整无人机高度和姿态c:控制无人机起飞和降落3:飞行模式选择a:手动模式b:跟随模式c:环绕模式4:摄像和拍照操作a:切换摄像和拍照模式b:调整相机参数c:拍摄和录制操作5:遥控器操作a:各个按键功能介绍b:遥控器航拍模式设置c:遥控器姿态控制二、御Spark操作指南1:准备工作a:检查无人机及遥控器电池电量b:安装方式或平板设备并连接遥控器 c:连接无人机和遥控器2:起飞和降落a:解锁无人机b:调整无人机高度和姿态c:控制无人机起飞和降落3:飞行模式选择a:手动模式b:跟随模式c:轨迹模式4:摄像和拍照操作a:切换摄像和拍照模式b:调整相机参数c:拍摄和录制操作5:手势操作a:手势控制介绍b:使用手势进行拍照和录像三、御Phantom操作指南1:准备工作a:检查无人机及遥控器电池电量b:安装方式或平板设备并连接遥控器 c:连接无人机和遥控器2:起飞和降落a:解锁无人机b:调整无人机高度和姿态c:控制无人机起飞和降落3:飞行模式选择a:手动模式b:自动返航模式c:航点飞行模式4:摄像和拍照操作a:切换摄像和拍照模式b:调整相机参数c:拍摄和录制操作5:导航功能a:使用GPS和指南针进行导航b:基本的航点设置和飞行路径规划附件:1:大疆御Mavic说明书:pdf2:大疆御Spark说明书:pdf3:大疆御Phantom说明书:pdf法律名词及注释:1:无人机:也称为无人驾驶飞行器,指一种没有人操控的飞行器。
2:遥控器:指用于远程控制无人机飞行的手持控制器。
3:航拍:指使用无人机进行空中摄影或摄像。
大疆御mavic mini 操作方法

大疆御mavic mini 操作方法
1. 拆箱并组装
首先打开包装盒,取出所有零部件,包括飞行器、遥控器、电池、充电器、USB 数据线、备用螺旋桨和螺丝等,然后按照说明书的指引,将电池装入飞行器内部,组装好螺旋桨和螺丝,最后将飞行器和遥控器互相配对。
2. 准备飞行环境
在飞行之前需要在安全的环境下做好准备,要确保飞行器能够正常工作。
首先需要准确地了解飞行区域及其地理环境,了解是否有道路、人行道、建筑物等障碍物等;然后需要检查天气是否适合飞行,尤其是风力、降雨、大雾等因素;最后还需要检查电池电量是否足够。
3. 插入电池并充电
当电池电量不足时,需要将电池插入充电器中进行充电,使用原装充电器即可,充电时间为40分钟左右。
4. 配置WiFi连接
将手机与遥控器连接,并使用手机打开大疆APP,将遥控器与手机进行连接,进入WIFI设置界面进行参数设置。
5. 装配螺旋桨以及遥控连接
在电池已插入飞行器之后,拿出遥控handheld controller 并再次按一次电源
开关,遥控器进入联机状态的灯光将会变绿,同时将手机连接到遥控器所发出来的wifi 信号
6. 飞行前的调整
在飞行之前,需要对飞行器进行调整,包括对无人机电池进行耳机测算,检测螺旋桨是否正常运转,检测遥控器是否正常连接,以及进行其他相关的设置和调整。
7. 飞行操控
搭配手机app 操作无人机,首先需要开启无人机和遥控器,然后使用app进行飞行设置,包括调整飞行高度、飞行速度、摄像头角度等参数,然后通过遥控器进行对无人机的操作,控制飞行器在空中飞行,在飞行过程中需要及时关注飞行器的电量,避免电力不足而造成事故。
大疆御操作指南

⼤疆御操作指南⼀、功能亮点MavicPro配备28mm(35mm格式等效)低畸变⼴⾓相机和⾼精度防抖云台,可拍摄1200万像素JPEG以及⽆损RAW格式的照⽚及4K超⾼清视频。
信号传输距离最远可达7km。
⼆、飞⾏模式1、P模式(定位):使⽤GPS模块和前视视觉系统和下视视觉系统以实现飞⾏器精确悬停、指点飞⾏以及⾼级模式等功能。
P模式下,GPS信号良好时,利⽤GPS可精准定位;GPS信号⽋佳,光照条件满⾜视觉系统需求时利⽤视觉系统定位。
开启前视避障功能且光照条件满⾜视觉系统需求时,最⼤飞⾏姿态⾓为16°,最⼤飞⾏速度10m/s。
未开启前视避障功能时最⼤飞⾏姿态⾓为25°,最⼤飞⾏速度16m/s。
在GPS卫星信号差或者指南针受⼲扰、并且不满⾜视觉定位⼯作条件时,飞⾏器将进⼊姿态(ATTI)模式。
姿态模式下,飞⾏器容易受外界⼲扰,从⽽在⽔平⽅向将会产⽣飘移;并且视觉系统以及部分智能飞⾏模式将⽆法使⽤。
因此,该模式下飞⾏器⾃⾝⽆法实现定点悬停以及⾃主刹车,请尽快降落到安全位置以避免发⽣事故。
同时应当尽量避免在GPS卫星信号差以及狭窄空间飞⾏,以免进⼊姿态模式,导致飞⾏事故。
2、S模式(运动):使⽤GPS模块以实现精确悬停。
飞⾏器操控感度经过调整,最⼤飞⾏速度将会提升。
当选择使⽤S模式时,前视视觉系统将⾃动关闭,飞⾏器⽆法⾃⾏避障。
S模式下不⽀持地⾯站及⾼级模式功能。
3、注意:在使⽤S模式(运动)飞⾏时,前视视觉系统不会⽣效,飞⾏器⽆法主动刹车和躲避障碍物,⽤户务必留意周围环境,操控飞⾏器躲避飞⾏路线上的障碍物。
三、飞⾏器状态指⽰灯说明四、⾃动返航(智能返航,智能低电量返航以及失控返航。
)1、记录返航点起飞时或飞⾏过程中,GPS信号⾸次达到(四格及以上)时,将记录飞⾏器当前位置为返航点,记录成功后,飞⾏器状态指⽰灯将快速闪烁若⼲次。
2、失控返航当GPS信号良好,指南针⼯作正常,且飞⾏器成功记录返航点后,当⽆线信号在RC 控制模式下中断3秒或以上,或在Wi-Fi控制模式下中断20秒或以上,飞控系统将接管飞⾏器控制权,控制飞⾏器飞回最近记录的返航点。
大疆御遥控操作方法
大疆御遥控操作方法
大疆御遥控操作方法如下:
1. 打开御遥控电源:按下遥控机身背部的电源按钮,电源指示灯亮起,表示御遥控开机成功。
2. 连接御飞机:打开御飞机电源,等待御飞机与御遥控建立连接。
连接成功后,遥控器和飞机的指示灯会进行闪烁。
3. 校准飞机:在御遥控上按下“C1”和“C2”两个摇杆的内侧下方按钮,进入飞机校准模式。
按照屏幕上的指示,将飞机放置在水平平稳的表面上,等待飞机的校准完成。
4. 解锁飞机:按下御遥控上的左摇杆(油门杆)和右摇杆(方向杆)同时向下,解锁飞机的电机。
此时,御飞机已准备好起飞。
5. 起飞与降落:将左摇杆(油门杆)向上推动,控制御飞机起飞。
将左摇杆向下推动,控制御飞机降落。
6. 控制飞行:使用左摇杆(油门杆)控制飞机的升降;使用右摇杆(方向杆)控制飞机的方向。
左、右、前、后的倾斜调整通过左摇杆(油门杆)同时调整。
7. 拍照和录像:御遥控上设有照相机和录像按钮,分别用于拍照和录像操作。
按下拍照按钮,可以拍摄照片;按住录像按钮,可以开始录制视频。
8. 返航功能:御遥控上有“RTH”按钮,用于触发御飞机的返航功能。
当你按下“RTH”按钮后,飞机会根据之前设置的返航点自动返回起飞点。
9. 结束飞行:在飞行结束后,按下御遥控机身背部的电源按钮,长按3秒,可关闭御遥控。
同时,关闭飞机电源。
请注意,在操作大疆御遥控前,务必详细阅读使用手册,并按照说明进行操作,确保安全。
DJI Mavic Mini 2 无人驾驶遥控器说明书

52
14,922
107-1 8,079 4,083 1,378 214 1,431 185 157
55
15,582
-4-
4 of 206
學年期
106-2 106-1 105-2 105-1
日間學制
學士 碩士 博士
7,807 8,085 7,759 8,028
3,844 3,956 3,785 3,926
五、108 學年度第 1 學期教師延遲繳交學士班成績,計有 6 科,成績筆數 85
筆,較前一學期(107 學年度第 2 學期)增加 69 筆。近年成績延遲繳交
情形如下:
學年期別 108-1 107-2 107-1 106-2 106-1 105-2 105-1
教師人數 6 2 7 3 4 7 3
科目數 6 2 9 3 6 9 6
上人數統計如下:
學年期 105-1 105-2 106-1 106-2 107-1 107-2 108-1
人數
265
313
290
268
287
276
266
七、109 學年度轉系、雙主修、輔系作業刻正進行中,依行事曆所訂於 5 月 25
日公告申請結果,近年錄取人數及錄取率如下:
二、108 學年度第 1 學期休學人數共計 2,266 人,近年休學人數如下:
學年期
108-1 107-2 107-1 106-2 106-1 105-2 105-1
日間學制
學士
358 335 353 323 331 291 283
碩士
961 881 937 870 906 861 909
博士
425 418 432 414 419 410 445
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、功能亮点MavicPro配备28mm(35mm格式等效)低畸变广角相机和高精度防抖云台,可拍摄1200万像素JPEG以及无损RAW格式的照片及4K超高清视频。
信号传输距离最远可达7km。
二、飞行模式1、P模式(定位):使用GPS模块和前视视觉系统和下视视觉系统以实现飞行器精确悬停、指点飞行以及高级模式等功能。
P模式下,GPS信号良好时,利用GPS可精准定位;GPS信号欠佳,光照条件满足视觉系统需求时利用视觉系统定位。
开启前视避障功能且光照条件满足视觉系统需求时,最大飞行姿态角为16°,最大飞行速度10m/s。
未开启前视避障功能时最大飞行姿态角为25°,最大飞行速度16m/s。
在GPS卫星信号差或者指南针受干扰、并且不满足视觉定位工作条件时,飞行器将进入姿态(ATTI)模式。
姿态模式下,飞行器容易受外界干扰,从而在水平方向将会产生飘移;并且视觉系统以及部分智能飞行模式将无法使用。
因此,该模式下飞行器自身无法实现定点悬停以及自主刹车,请尽快降落到安全位置以避免发生事故。
同时应当尽量避免在GPS卫星信号差以及狭窄空间飞行,以免进入姿态模式,导致飞行事故。
2、S模式(运动):使用GPS模块以实现精确悬停。
飞行器操控感度经过调整,最大飞行速度将会提升。
当选择使用S模式时,前视视觉系统将自动关闭,飞行器无法自行避障。
S模式下不支持地面站及高级模式功能。
3、注意:在使用S模式(运动)飞行时,前视视觉系统不会生效,飞行器无法主动刹车和躲避障碍物,用户务必留意周围环境,操控飞行器躲避飞行路线上的障碍物。
三、飞行器状态指示灯说明四、自动返航(智能返航,智能低电量返航以及失控返航。
)1、记录返航点起飞时或飞行过程中,GPS信号首次达到(四格及以上)时,将记录飞行器当前位置为返航点,记录成功后,飞行器状态指示灯将快速闪烁若干次。
2、失控返航当GPS信号良好,指南针工作正常,且飞行器成功记录返航点后,当无线信号在RC控制模式下中断3秒或以上,或在Wi-Fi控制模式下中断20秒或以上,飞控系统将接管飞行器控制权,控制飞行器飞回最近记录的返航点。
如果在返航过程中,无线信号恢复正常,返航过程仍将继续,用户可短按遥控器智能返航按键以取消返航。
注意:a.当GPS信号欠佳或者GPS不工作时,无法实现返航。
b.返航过程中,当飞行器上升至20米以后但没达到预设返航高度前,若用户推动油门杆,飞行器将会停止上升并从当前高度返航。
c.自动返航过程中,若光照条件不符合前视视觉系统的需求,则飞行器无法躲避障碍物,但用户可使用遥控器控制飞行器航向。
所以在起飞前务必先进入DJIGO4App的“相机”界面,选择设置适当的返航高度。
d.失控返航过程中,在飞行器上升至预设返航高度前,飞行器不可控,但用户可以通过取消返航重新获取控制权。
3、智能返航智能返航模式可通过遥控器智能返航按键或DJIGO4App中的相机界面启动。
智能返航过程中,飞行器根据前视视觉系统提供的数据判断前方是否有障碍物,智能地选择悬停或绕过障碍物。
如果前视视觉系统失效,用户仍能控制飞行器航向,通过遥控器上的智能返航按键或DJIGO4App退出智能返航后,用户可重新获得控制权。
飞行器到达返航点上方时,降落保护功能生效,飞行器具体表现为:a.若飞行器降落保护功能正常且检测到地面可降落时,飞行器将直接降落;b.若飞行器降落保护功能正常,但检测结果为不适合降落时(例如下方为不平整地面或水面),则飞行器悬停,等待用户操作;c.若飞行器降落保护功能不正常,则下降到离地面0.5米时,DJIGO4App将提示用户是否需要继续降落。
点击确认后,飞行器降落。
4、智能低电量返航智能飞行电池电量过低时,没有足够的电量返航,此时用户应尽快降落飞行器,否则飞行器将会直接坠落,导致飞行器损坏或者引发其它危险。
为防止因电池电量不足而出现不必要的危险,MavicPro主控将会根据飞行的位置信息,智能地判断当前电量是否充足。
若当前电量仅足够完成返航过程,DJIGO4App将提示用户是否需要执行返航。
若用户在10秒内不作选择,则10秒后飞行器将自动进入返航。
返航过程中可短按遥控器智能返航按键取消返航过程。
智能低电量返航在同一次飞行过程中仅出现一次。
若当前电量仅足够实现降落,飞行器将强制下降,不可取消。
返航和下降过程中均可通过遥控器(若遥控器信号正常)控制飞行器。
5、精准降落飞行器在自动返航的过程中,当到达返航点上方后开始匹配地形特征,一旦匹配成功则开始修正降落位置,使飞行器能够精准地回到起飞点。
飞行器仅在满足以下条件的情况下可实现精准降落:a.飞行器仅在起飞时记录返航点,飞行过程中未刷新返航点b.飞行器起飞方式为垂直起飞,且起飞高度超过10mc.地面环境未发生动态变化d.地面环境纹理不是太少(例如雪地)e.光线不是特别暗(例如晚上)或强光照射降落过程中,可使用遥控器进行控制:a.下拉油门摇杆可加大下降速度b.上推油门摇杆或者其他方式拨动摇杆都被视为放弃精准降落,飞行器将垂直下降,降落保护功能同时生效。
6、自动返航安全注意事项a.自动返航过程中,若光照条件不符合前视视觉系统需求,则飞行器无法躲避障碍物,但用户可使用遥控器控制飞行器航向。
所以在起飞前务必先进入DJIGO4App 的“相机”界面,选择设置适当的返航高度。
b.飞行器在距离返航点20米以上时,自动返航过程中(包括智能返航、智能低电量返航和失控返航):1.如果飞行高度大于返航高度,则以当前高度返航。
2.如果飞行高度小于返航高度,飞行器将首先上升至返航高度并返航。
c.若飞行器距离返航点在5-20米之间,此时返航平飞速度为4m/s。
如果前视视觉系统正常工作(仅在返航前判断一次),则:1.如果飞行高度大于10米,则以当前高度返航。
2.如果飞行高度小于10米,飞行器将首先上升至10米并返航。
如果前视视觉系统失效,则飞行器会从当前高度立刻下降。
d.若在飞行器水平距离返航点5米以内触发返航,由于飞行器已经处于视距范围内,所以飞行器将会从当前位置自动下降并降落,而不会爬升至预设高度。
e.当GPS信号欠佳或者GPS不工作时,不可使用自动返航。
f.返航过程中,当飞行器上升至10米以后但没达到预设返航高度前,若用户按下遥控器上的急停按键,则飞行器将会暂停返航。
7、返航避障过程当光照条件满足前视视觉系统工作时,飞行器可实现返航避障。
具体过程如下:a.若机头前方15米处检测出障碍物,飞行器将减速。
b.减速至悬停后,飞行器将自行上升以躲避障碍物。
在上升至障碍物上方5米处后,飞行器停止上升。
c.退出上升状态,飞行器继续飞往返航点。
d.注意:前视视觉系统开启后,在智能返航过程中,为了确保机头朝向,用户将无法使用遥控器调整机头朝向。
飞行器无法自动躲避位于飞行器上方、侧方与后方的障碍物。
五、智能飞行模式1、指点飞行用户可通过点击DJIGO4App中的相机界面的实景图,指定飞行器向所选目标区域前进飞行,飞行器将自行沿指点选取的方向飞行。
若光照条件良好,飞行器在指点飞行的过程中可以躲避前障碍物或悬停以进一步提升飞行安全性。
启动指点飞行a.确保飞行器电量充足,并处于P模式。
启动飞行器,使飞行器起飞至离地面2米以上。
b.进入DJIGO4App的相机界面,点击进入高级模式,选择指点飞行并阅读注意事项。
c.轻触屏幕选定目标区域直到出现图标。
再次点击后,飞行器则自行飞往目标方向。
d.点击屏幕上的按钮。
或者向后掰动遥控器的右摇杆3s以上(以美国手为例),或者按下遥控器的“急停按键”。
退出指点飞行后,飞行器将于原地悬停。
用户可重新选定指点飞行方向继续飞行。
用户启动智能返航或自动降落功能时,飞行器将退出指点飞行,立刻执行返航或降落。
2、智能跟随a.确保飞行器电量充足,并处于P模式。
启动飞行器,使飞行器起飞至离地面2米以上。
b.进入DJIGO4App的相机界面,点击进入高级模式,选择智能跟随并阅读注意事项。
c.轻触屏幕并拖动选择需要跟踪的目标区域。
点击确认后,飞行器将与目标保持一定距离并跟随飞行。
若出现红框,则请重新选择目标。
d.使用智能跟随飞行过程中,飞行器会根据前视视觉系统提供的数据判断前方是否有障碍物,智能地选择悬停或绕过障碍物。
若跟随目标移动速度过快或长时间被遮挡,则需要重新选定跟随目标。
e.智能跟随模式包含如下功能::f.退出智能跟随点击屏幕上的按钮。
或者按下遥控器上的“急停按键”按钮。
退出智能跟随模式后,飞行器将于原地悬停。
用户可在屏幕上重新选定需要跟随的目标继续飞行。
3、手势自拍无需借助外部设备,用户即可通过手势自拍。
请按照如下步骤使用手势自拍功能。
注意:手势自拍只在拍照模式有效,若当前为录像模式,将会出现错误提示,机头指示灯红灯特快闪。
飞行器处于2米以上才可确认目标,若确认失败,机头指示灯将会红灯特快闪。
手势自拍模式下,可以开启GPS辅助视觉跟随,在手机GPS信号良好的情况下会在视觉目标丢失后用GPS持续跟随,直到重新找回目标。