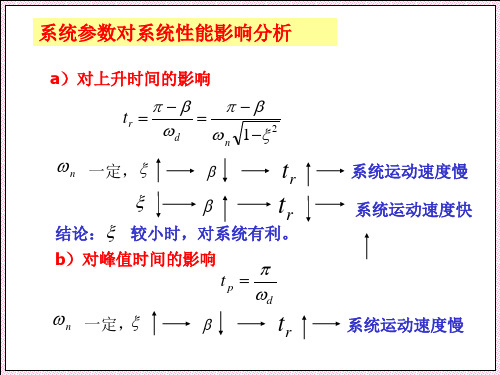
二阶系统性能的改善
8第三章 线性系统的时域分析(第八讲)
主导极点 如果系统中有一个(极点或一对)复数极点距虚轴最近, 且附近没有闭环零点;而其它闭环极点与虚轴的距离都比该极点与虚 轴距离大5倍以上,则此系统的响应可近似地视为由这个(或这对)极 点所产生。
3.5 线形定常系统的稳定性
稳定是控制系统能够正常运行的首要条件。 对系统进行各类品质指标的分析也必须在系统稳定的前提
求的 K和值,计算该系统的上升 时间tr ,tS ,td .
解:
=e 1 2 0.2
R(s)
—
K
C(s)
s(s 1)
1
ln( )
0.456
2 (ln 1 )2
tp
d
1s
d 3.14rad / s d n 1 2
n
Td ,改变 d 阻尼的大小
比例-微分控制可以不该变自然频率 n ,但可增大系统的阻尼比
1 由于PD控制相当于给系统增加了一个闭环零点, z Td
故比例-微分控制的二阶系统称为有零点的二阶系统。
当输入为单位阶跃函数时
C(s)
(s)R(s)
S2
SZ
2n S
n2
S2
Td n 2
(S
1 Td
)
(2n Tdn 2 )S
n2
Tdn2 2 'n
令z 1 Td
' Tdn
2
d '
z(S 2
n2 (S z) 2dnS n2 )
Td n
2
(3-36)
(3-35)
结论 可通过适当选择微分时间常数
二阶系统性能改善的Matlab仿真分析
龙源期刊网
二阶系统性能改善的Matlab仿真分析
作者:刘洋杨薇张付杰
来源:《现代电子技术》2012年第12期
摘要:掌握系统性能随参数变化的规律性,对于分析和设计系统是十分重要的。
在二阶系统中,一般采用比例-微分控制和测速反馈控制改善其性能。
这里利用Matlab对校正前后的系统进行仿真,分析两种方法对二阶系统性能改善的效果。
同时通过实例计算,得出比例-微分控制和测速反馈控制均可使系统快速性和稳定性提高。
仿真结果表明,两种方法均可显著改善二阶系统的性能。
关键词:二阶系统;比例-微分控制;测速反馈控制;Matlab。
第三章(2)性能改善、稳定性详述
C(s)
图3-18 控制系统的方块图
只要令
Kd
2 n
就可以实现系统在稳态时, 无误差地跟踪单位斜坡输入。
eSS
lim
S 0
SE(s)
lim
S 0
S S
2n Kdn2 2 2nS n2
2 n
Kd
例题:设一随动系统如图所示,要求系统的超调量为0.2,峰值
时间 t p ,1S 求①求增益K和速度反馈系数 。
将式(3-47)用部分分式展开,得
C(s)
A0 S
q Aj j1 S Pj
r k 1
Bk
(S
k nk ) Ck nk S 2 2 k nk S
1k2
(3 48)
q
r
r
C(t) A0
Ajepjt
Bk eknkt sinnk 1 k 2 t
C eknkt k
cosnk
1k2t
Amplitude
Step Response 1.4
1.2
1
0.8
0.6
0.4
0.2
0
0
1
2
3
4
5
6
Time (sec)
Linear Simulation Results 10
9
8
7
6
5
4
3
2
1
0
0
1
2
3
比例-微分控制 结构简单、成本低 抗干扰能力弱 开环增益不变 较差
测速反馈控制 结构复杂、成本高 抗干扰能力强 开环增益降低 较好
例题 如图所示的系统,单位阶跃响应如图所示的,求K和T。
R(s)
二阶系统性能的改善

Time Respond Methods
Time Respond Methods
线性系统的时域分析法
比例—微分控制和测速反馈控制的比较:
(1)从工程的实现角度来看,比例-微分装置可以用 RC 网络或 模拟运算线路来实现,结构简单,成本低;而测速反馈装置通常要 用测速发电机,成本高。 (2)抗干扰能力方面:微分控制对噪声有明显放大作用,当系 统输入端噪声严重时,一般不宜采用微分控制,同时微分器的输 入信号是偏差信号,信号电平低,需要相当大的放大作用,为了 使信噪比不明显恶化,要求采用高质量的放大器。而测速反馈对 噪声有滤波作用。 (3)对动态性能影响:两者均能改善系统性能,增加系统阻尼 比,降低超调量。在相同的阻尼比和自然频率条件下,测速反馈 控制因不增添闭环零点,所以超调量要低些,但反应速度却慢 些。另外测速反馈控制会使系统在斜坡输入下的稳态偏差加大。
Time Respond Methods
线性系统的时域分析法
6、二阶系统性能的改善
(1) 比例—微分控制
1 h(t)
R(s) R (s) E(s) E(s) 1 Tds
C(s) C (s) n2 s( s 2 ) S(S 2 )
2 n
n
n
0 e(t) 1
t
0
e(t)
.
t
0
t1
Time Respond Methods
自控实验第二次报告
实验二典型系统瞬态响应及性能的改善1.实验目的1.学习瞬态性能指标的测试技能。
2.掌握参数对系统瞬态指标的测试技能。
3.了解和观测校正装置对系统稳定性及瞬态特性的影响。
2.实验设备PC 机一台,TD -ACC +实验系统一套3.实验内容1.观测开环传递函数G s 0.5(0.51)Ks s +()=的典型二阶系统,在不同参数(K=4,5,10)下的阶跃响应。
2.观测开环传递函数10G s 0.5(0.51)s s +()=的典型二阶系统,加入校正装置后系统动态性能的改善,并测试性能指标。
4.实验原理1.典型二阶系统瞬态响应典型二阶系统的传递函数为2B 2G ()21nn s s s ϖξϖ=++,ξ和n ϖ是决定二阶系统动态性能的两个重要参数,这两个参数的变化会引起系统节约响应的超调量、调节时间等动态性能指标的变化,图2-1是典型二阶模拟系统原理方框图,系统中其他参数不变的情况下,系统放大倍数K 的改变决定了参数ξ和n ϖ的变化,从而对系统研究动态性能产生影响。
系统的开环传递函数为01()(1)K G s T s T s =+闭环传递函数为2012222010101/()()1()2n n n K T T C s Ks K R s T T s T s K s s s s T T T ϖξϖϖΦ====++++++无阻尼自然频率n ϖ阻尼比ξ可以看出T 0、T 1一定时,改变K 值就可以改变ξ。
当=1ξ时,系统为临界阻尼,1ξ<为欠阻尼,1ξ>为过阻尼,欠阻尼系统比临界阻尼系统更快地达到稳态值,过阻尼系统反应迟钝,所以一般系统大都设计成欠阻尼系统。
当0<ξ<1,即欠阻尼情况时,典型二阶系统的单位阶跃响应为衰减震荡()10) (t 0)n t d C t ξϖϖ-=+≥峰值时间:t p d πϖ==超调量:p %100%e σ-=⨯调节时间:4(=2)s nt ξϖ=∆时图2-2是图2-1的模拟电路图。
自动控制控大作业

SHANGHAI UNIVERSITY课程项目MATLAB的模拟仿真实验专业课:自动控制原理学院机自学院专业(大类)电气工程及其自动化姓名学号分工:蒋景超负责MATLAB仿真部分顾玮负责分析结论其它共同讨论二阶系统性能改善一、要求(1)比例-微分控制与测速反馈控制的传递函数求解(2)性能分析与对比(3)举出具体实例,结合matlab分析二、原理在改善二阶系统性能的方法中,比例-微分控制和测速反馈控制是两种常用的方法。
(1)比例-微分控制:比例-微分控制是一种早期控制,可在出现位置误差前,提前产生修正作用,从而达到改善系统性能的目的。
图1 比例微分控制系统(2)测速反馈控制:测速反馈控制是通过将输出的速度信号反馈到系统输入端,并与误差信号比较,其效果与比例微分-控制相似,可以增大系统阻尼,改善系统性能。
图2测速反馈控制系统(3)经典二阶控制系统图3经典二阶控制系统三、实例分析1、标准传递函数 )2()(G 2n n s s s ζωω+= 22)2()(nn n s s s ωζωω++=Φ 00.2n =ω 15.0=ζMATLAB 代码:num=[4];den=[1,0.6,4];G=tf(num,den);t=0:0.1:10;step(G ,t);图4标准传递函数仿真2、比例微分控制系统与经典二阶系统比较22)2()1()(n n d n d s s s T s ωωζω+++=Φ 2n d d T ωζζ+= 设置d T =0.15 d ξ=0.30 00.2=n ω ξ=0.15MATLAB 代码:num1=[4];num2=[0.6 4];den1=[1 0.6 4];den2=[1 1.20 4];[y1,x,t]=step(num1,den1,t);[y2,x,t]=step(num2,den2,t);plot(t,y1,t,y2)grid ;xl abel('t');yl abel('h(t)')t=0:0.1:30;图5比例微分控制系统与经典二阶系统比较仿真3、测速反馈控制系统与经典控制二阶系统比较22)2()(nn d n s s s ωωζω++=Φ 2n d τωζζ+= τ=0.50 d ξ=0.65 00.2=n ω ξ=0.15MATLAB 代码:num1=[4];num2=[4];den1=[1,0.60,4];den2=[1,2.60,4];[y1,x,t]=step(num1,den1,t);[y2,x,t]=step(num2,den2,t);plot(t,y1,t,y2)grid ;xlabel('t');ylabel('h(t)')t=0:0.1:30;图6测速反馈控制系统与经典控制二阶系统比较四、分析与结论1、经典二阶控制系统%σ=62% 选取误差带△=0.05时调节时间s t =11.67s2、比例微分控制系统%σ= 37% 选取误差带△=0.05时调节时间s t =5.83s分析:通过比较系统改善前与改善后性能指标的变化和系统在单位阶跃响应下仿真曲线的对比可以得出,比例微分控制能够使系统振荡减小,同时超调量减小,改善系统的稳定性。
二阶系统
3-4 二阶系统用二阶微分方程描述的系统,称二阶系统。
它在控制系统中应用极为广泛。
例如,R L C --网络、忽略电枢电感后的电动机、弹簧-质量-阻尼器系统、扭转弹簧系统等等。
此外,许多高阶系统,在一定条件下,往往可以简化成二阶系统。
因此,详细研究和分析二阶系统的特性,具有重要的实际意义。
以图1-7、图2-21所示随动系统为例进行研究。
这里把图2-21进一步简化成图3-9(a)。
图中i K K K K m 21=,系统闭环传递函数为Ks s T K s R s C m ++=2)()( (3-9) 为了使研究的结论具有普遍性,将上式写成典型形式或标准形式或 2222)()(nn n s s s R s C ωξωω++= (3-10)图3-9(b)为二阶系统的一般结构图形式。
式中K T T m n ==ω1;K T 12=ξ;mKT 21=ξ 可见,二阶系统的响应特性完全可以由阻尼比ξ和自然频率n ω (或时间常数T )两个参数确定。
一般形式的闭环特征方程为方程的特征根(系统闭环极点)为当阻尼比较小,即10<<ξ时,方程有一对实部为负的共轭复根系统时间响应具有振荡特性,称为欠阻尼状态。
当1=ξ时,系统有一对相等的负实根系统时间响应开始失去振荡特性,或者说,处于振荡与不振荡的临界状态,故称为临界阻尼状态。
当阻尼比较大,即1>ξ时,系统有两个不相等的负实根这时系统时间响应具有单调特性,称为过阻尼状态。
当0=ξ时,系统有一对纯虚根,即n j s ω±=2,1,称为无阻尼状态。
系统时间响应为等幅振荡,其幅值取决于初始条件,而频率则取决于系统本身的参数。
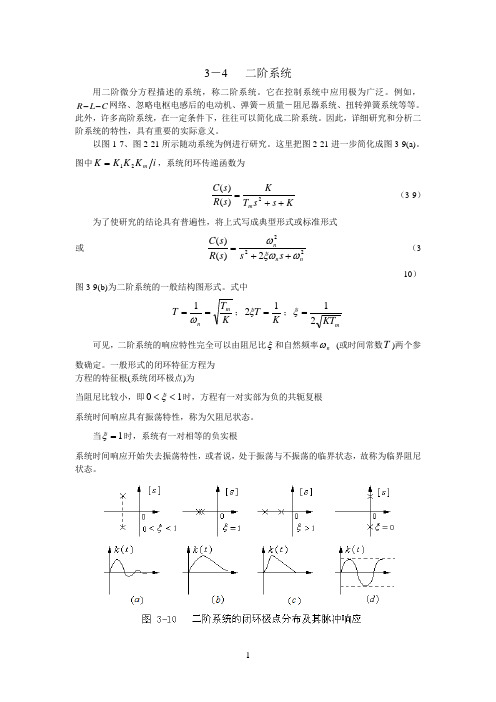
上述各种情况对应的闭环极点分布及对应的脉冲响应,如图3-10所示。
下面分别研究欠阻尼和过阻尼两种情况的响应及其性能指标。
一、 二阶系统的阶跃响应1、欠阻尼二阶系统的单位阶跃响应 二阶系统中,欠阻尼二阶系统最为常见。
由于这种系统具有一对实部为负的共轭复根,时间响应呈现衰减振荡特性,故又称振荡环节。
自动控制原理_卢京潮_二阶系统的时间响应及动态性能
自动控制原理_卢京潮_二阶系统的时间响应及动态性能3.3 二阶系统的时间响应及动态性能3.3.1 二阶系统传递函数标准形式及分类常见二阶系统结构图如图3-,所示其中,为环节参数。
系统闭环传递函数为 KT K ,s, ()2Ts,s,K1化成标准形式2,n (首1型) (3-5) ,(s),22s,2,,s,,nn1,(s), (尾1型) (3-6) 22Ts,2T,s,111T1K1式中,,,。
,,,,,,Tn2KTTTK11、分别称为系统的阻尼比和无阻尼自然频率,是二阶系统重要的特征参数。
二阶系统的首,,n1标准型传递函数常用于时域分析中,频域分析时则常用尾1标准型。
二阶系统闭环特征方程为22 D(s),s,2,,s,,,0nn其特征特征根为2,,,,,,,,,1 nn1,2若系统阻尼比取值范围不同,则特征根形式不同,响应特性也不同,由此可将二阶系统分类,见,表3-3。
表3-3 二阶系统(按阻尼比)分类表 ,分类特征根特征根分布模态,t1e ,,12,,,,,,,,,1 nn 1,2,t2e过阻尼,,tn ,,1e,,,, 1,2n,,tnte临界阻尼,,t,2n,,esin1,t0,,,1 n2,,,,,,j,1,, nn1,2t,,,2necos1,,,t欠阻尼 n57,sint ,,0n ,,,j, 1,2ncos,tn零阻尼数学上,线性微分方程的解由特解和齐次微分方程的通解组成。
通解由微分方程的特征根决定,,t,t,tn12代表自由响应运动。
如果微分方程的特征根是,,且无重根,则把函数,,eee,,,?,?,12n称为该微分方程所描述运动的模态,也叫振型。
,t2,t,如果特征根中有多重根,则模态是具有,形式的函数。
tete,?(,,j,)t(,,j,)t如果特征根中有共轭复根,则其共轭复模态与可写成实函数模态ee,,,,j,,t,t与。
esin,tecos,t每一种模态可以看成是线性系统自由响应最基本的运动形态,线性系统自由响应则是其相应模态的线性组合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 微分器对噪声有放大作用,并且对高频噪声的放大作用, 远大于对缓慢变化输入信号的放大作用,因此在系统输 入端噪声较强的情况下,不宜采用比例-微分控制方式。
(2) 测速反馈控制
二阶系统的测速反馈控制是将输出量的导数反馈到输入端, 同样可以改善系统的性能,这种系统称为测速反馈系统。
课程的体系结构
一般 概念
分析
系统 模型
时域法 根轨迹法 频域法
性能 指标
校正
第三章 线性系统的时域分析法
3-1 系统时间响应的性能指标 3-2 一阶系统的时域分析
3-3 二阶系统的时域分析 3-4 高阶系统的时域分析
学时: 10+2
3-5 线性系统的稳定性分析 3-6 线性系统的稳态误差计算
开环增益 k n
2 ktn
R(s)
R(s)
EE((ss))
--
22 nn
C(Cs()s)
sS((sS 22 nn))
Kts
ss22 n n 2 ktn 2sn 2s22 t n 2 ns n 2
t
1 2
ktn
例:设控制系统如图所示,其中(a)为无测速反馈的原控制 系统;(b)为加入测速反馈控制后的系统。
(1) 比例—微分控制
h (t) 1
RR(ss)) EE((s)s)
22 nn
CC((ss))
1
-
Tds
sS((sS22 nn))
0 e (t)
t
1
0.
t
e (t)
0
t1 t2 t3 t4 t5 t6
t
比例—微分控制对系统性能的影响:
• 微分控制可以增大系统的阻尼,使阶跃响应的超调量下降, 调节时间缩短,且不影响常值稳态误差及系统的自然频率。
Csss5s4s22s2s3 2
A0 A1 A2 A3 s s4 s1j s1j
A0
limscs15
s0
4
A1ls i4m (s4)cs1 4
A 2s l 1 ij( m s 1j)cs 7 4 j
A 3s li m 1j(s1j)cs 74 j h t1 5 1e 4 t1e t1c4o t2 ssitn
一、高阶系统的时域分析
s
1
G s H sG
s
b s m b s m 1 L
0
1
a s n a s n1 L
0
1
b sb
m 1
m
a sa
n 1
n
m
k
s
z i
i1 n
s
s j
j1
在实际控制系统中,所有闭环极点通常都不相同,
因此C(S)可写成
m
kszi
Cs q
i1 r
s ssj
c (t) t 2 nn1 1 2e n t sin n 1 2 t 2
响应曲线
稳态误差
2 e ss n
3-3 二阶系统的时域分析
教学目的改善 比例-微分控制 测速反馈控制 非零初始条件下二阶系统的响应过程
6、二阶系统性能的改善
试确定使系统阻尼比为0.5时的 K t 值, 并分析系统(a)和(b)的各项性能指标。
比例—微分控制和测速反馈控制的比较:
(1)从工程的实现角度来看,比例-微分装置可以用 RC 网络或 模拟运算线路来实现,结构简单,成本低;而测速反馈装置通常要 用测速发电机,成本高。
(2)抗干扰能力方面:微分控制对噪声有明显放大作用,当系 统输入端噪声严重时,一般不宜采用微分控制,同时微分器的输 入信号是偏差信号,信号电平低,需要相当大的放大作用,为了 使信噪比不明显恶化,要求采用高质量的放大器。而测速反馈对 噪声有滤波作用。
s2 2kksk2
j1
k1
q2rn
式中, q2rn,q为实数极点个数,r为共轭 极点的对数。将上式展成部分分式
C sA 0q
A j
r
B ksck
s j 1ssj k 1s22k ksk 2
A0为输入极点s=0处的留数,
A
是
j
S
S
处的留数。
j
A
limsCs
b m
0
s0
a
n
A l i m s s C s j 1 , 2 L q
3-3 二阶系统的时域分析
GS n2
S(S2n)
二阶系统的数学模型 二阶系统的单位阶跃响应
SS22 n2nSn2
h(t)1
1
12
ent
sindt
欠阻尼二阶系统的动态过程分析
tr
n 12
tp
d
%e/ 12100%
ts
3.5 n
过阻尼二阶系统的动态过程分析
二阶系统的单位斜坡响应
二阶系统的单位斜坡响应
44 4
二、高阶系统性能的分析方法
在工程中我们常常采用闭环主导极点的概念,对高阶系统 进行近似分析。 定义:如果在所有的闭环极点中,距虚轴最近的极点周围 没有闭环零点,而其它极点又远离虚轴,那么距虚轴最近 的极点所对应的响应分量,无论从指数还是从系数看,它 们都是响应中起主导作用,这样的闭环极点称为主导极点。
j
s s j
j
r
BksCk
r
Ak1
k1s22kksk2 k1s2kk jk 1k2
r
Ak2
k1s2kk jk 1k2
Ak1, Ak2 分别为
sj 12
kk
k
k
处的留数
q
r
ht A0
Ajesjt
Bekkt k
cos1kkt
j1
k1
r
k1
ck Bkkk k 1k2
ekkt
sin1k2kt
➢ 显然,对于稳定的高阶系统而言,闭环极点的负实部
的绝对值越大,其对应的响应分量衰减得越快;反之,
则衰减越慢。
➢ 系统时间响应的类型虽然取决于闭环极点的性质和大 小,然后时间响应的形状却与闭环零极点有关。
举例 例:已知系统闭环传函
s 5s25s6
s3 6s2 10s8
求单位阶跃响应。
解: ss54ss22s2s32
(3)对动态性能影响:两者均能改善系统性能,增加系统阻尼 比,降低超调量。在相同的阻尼比和自然频率条件下,测速反馈 控制因不增添闭环零点,所以超调量要低些,但反应速度却慢 些。另外测速反馈控制会使系统在斜坡输入下的稳态偏差加大。
3-4 高阶系统的时域分析
高阶系统的时域分析 高阶系统性能的分析方法
q
r
ht A0
Ajesjt
Bekkt k
cos1kkt
j1
k1
几点说明
r
ck Bkkk
k1 k 1k2
ekkt
sin1k2kt
➢ 如果所有闭环极点都具有负实部,即所有闭环极点都
位于S的左半平面,那么随着时间t的增大,上式中的指数
项和阻尼正弦、余弦项都将趋近于零,高阶系统是稳定
的,其稳态输出量为A0。