准高速、高速铁路缓和曲线线型选择研究
2种铁路缓和曲线线型力学性能对比分析
第30卷,第6期 中国铁道科学Vol 130No 16 2009年11月 C HINA RA IL WA Y SCIENCENovember ,2009 文章编号:100124632(2009)06200012062种铁路缓和曲线线型力学性能对比分析李向国1,2,李木松2,卜建清2,王海龙1(1.西南交通大学土木工程学院,四川成都 610031; 2.石家庄铁道学院土木工程分院,河北石家庄 050043) 摘 要:基于行驶动力学理论,推导出考虑列车加减速行驶的车体侧向加速度时变率计算公式。
针对三次抛物线型和半波正弦型2种线型的铁路缓和曲线,通过理论计算并与仿真计算结果进行对比,分析5种不同工况下缓和曲线上车体侧向加速度时变率的变化情况。
结果表明:给出的考虑列车加减速行驶的曲线上车体侧向加速度时变率计算公式可用于不同缓和曲线线型的比选;在三次抛物线型缓和曲线上的4个连接点处,车体侧向加速度时变率有突变值,而半波正弦型的缓和曲线没有突变值,因此半波正弦型缓和曲线对提高旅客乘坐舒适度比三次抛物线型缓和曲线更具有优势。
关键词:缓和曲线;线型;行驶动力学;车体;加速度时变率 中图分类号:U212133211 文献标识码:A 收稿日期:2008211221;修订日期:2009207224 基金项目:国家自然科学基金资助项目(50878134);河北省自然科学基金资助项目(E2009000904);河北省教育厅科研计划项目(2006142) 作者简介:李向国(1973—),男,河北藁城人,副教授,博士研究生。
长期以来世界各国铁路工作者对铁路缓和曲线的研究一直没有停止过,并对其线型选择存在着较大的争议[124]。
目前世界上使用的缓和曲线线型有三次抛物线型(包括改善型)、半波正弦型、一波正弦型、七次四项式型等[5],但到目前为止在轮轨高速铁路上应用的线型只有三次抛物线型和半波正弦型[6]。
车体侧向加速度时变率是列车通过曲线的重要评价指标之一,本文基于行驶动力学理论,将列车简化为1个质点,假设车辆与轨道完全跟随运行,推导考虑列车加减速行驶的车体侧向加速度时变率计算公式,并针对三次抛物线型和半波正弦型2种铁路缓和曲线进行力学性能的对比分析。
高速铁路缓和曲线设计研究

外高速铁路的运营实践也表明了这一点。由于
传统的三次抛物线形简单、设计方便, 平立面
有效长度长, 现场应用、养护经验丰富等特
点, 我国目前设计的高速铁路仍以三次抛物线
形缓和曲线为首选线形。
2 缓和曲线长度的计算
缓和曲线长度是高速铁路平面设计的主
要参数之一, 为保证列车运行的安全和旅客舒
适度的要求, 缓和曲线应该有足够的长度。但
缓 和 曲 线 线 性 的 选 择 , 主 要 从 保 证 列 车 (即超高时变率限值 [ f] ) 要求的缓和曲线长度 超 高 h 的 取 值 问 题 , h 值 越 大 , 缓 和 曲 线 越
运 行 平 稳 和 曲 线 上 旅 客 乘 坐 的 舒 适 性 来 考 虑 。 L3
从各种研究和实测结果表明, 只要缓和曲线长
长的高速铁路, 由脱轨安全要求计算的缓和曲
线长度显然不起控制作用。故高速铁路缓和曲
线长度主要取决于其他两个条件, 即:
2.1.1 乘 坐 舒 适 度 允 许 的 未 被 平 衡 横 向 加
责任编辑: 杨帆
- 33-
坐的舒适性, 但过长的缓和曲线控制着平面选 值
350km /h 时 , f=29~50mm /sec, k=9.5~5.5。 我
线和纵断面变坡点设置的灵活性, 并引起工程
从 相 关 试 验 得 出 的 未 被 平 衡 横 向 加 速 度 国 现 行 规 范 规 定 , [ f] 一 半 条 件 下 取 25mm /
计 算 出 的 L3 作 为 控 制 缓 和 曲 线 长 度 , 把 [ f] 代入 L3 的计算公式后可以简化为:
一般条件: L3≥11×10-3 Vmax.h 困难条件: L3≥9×10-3 Vmax.h 可 以 看 出 , 对 于 某 一 个 曲 线 而 言 , Vmax
高速铁路道岔的垂直曲线设计与应用研究
高速铁路道岔的垂直曲线设计与应用研究摘要:高速铁路道岔是铁路系统中的重要组成部分,它在保证列车安全运行的同时,也对列车行驶的平稳性和乘客舒适度产生影响。
本文旨在研究高速铁路道岔的垂直曲线设计与应用,探讨如何在设计阶段中优化道岔的曲线参数,以及如何利用合理的曲线设计来提高列车的运行效率和乘客的乘坐舒适度。
1. 引言在高速铁路系统中,道岔的垂直曲线设计是影响列车行驶品质的关键因素之一。
垂直曲线的设计不仅影响列车通过道岔时的垂向加速度和减速度,还影响列车通过道岔时的舒适性,对于列车的稳定行驶和乘客的乘坐体验十分重要。
因此,研究高速铁路道岔的垂直曲线设计与应用对于提高铁路运输系统的安全性和乘坐舒适度具有重要意义。
2. 高速铁路道岔的垂直曲线设计2.1 垂直曲线的基本理论高速铁路道岔的垂直曲线设计需要遵循垂直曲线的基本理论原则。
在设计中,需要考虑列车通过道岔时的减速度和加速度,并使其保持在可接受范围内,以避免给乘客带来不适和影响列车的平稳行驶。
2.2 参数选择与优化在高速铁路道岔的垂直曲线设计中,有许多参数需要选择和优化。
其中包括曲率半径、超高和超高点位置等。
曲率半径的选择和优化直接关系到列车通过道岔时的减速度和加速度,而超高和超高点位置则决定了列车通过道岔时的垂向变化。
2.3 曲线设计模型为了优化高速铁路道岔的垂直曲线设计,可以建立相应的曲线设计模型。
通过模型可以对不同参数进行调整和优化,并对列车通过道岔时的垂向动力学行为进行分析和预测。
这有助于设计师在设计阶段中优化道岔的曲线参数,以提高列车的行驶品质和乘客的舒适度。
3. 高速铁路道岔垂直曲线设计的应用3.1 提高列车的运行效率通过合理的垂直曲线设计可以减少列车的制动和加速时间,提高列车的运行效率。
合理的曲线设计可以使列车在道岔区段达到较高的运行速度,并在改变行驶方向时减少能量损失和阻力。
这将有助于提高铁路系统的运行效率和减少列车运行时间。
3.2 提高乘客的乘坐舒适度良好的垂直曲线设计可以减小列车通过道岔时的减速度和加速度,从而提高乘客的乘坐舒适度。
高速铁路缓和曲线线型及其运营性能比较分析
高速铁路缓和曲线线型及其运营性能比较分析许国平;李秋义【摘要】介绍了国内外缓和曲线的主要类型,分析了缓和曲线线型基本条件与运营性能的关系,阐明了运营性能在高速铁路缓和曲线选型中的重要性,比较了几种典型的曲线型外轨超高顺坡缓和曲线的运营性能,对我国高速铁路缓和曲线合理选型提出了建议.【期刊名称】《铁道勘察》【年(卷),期】2005(031)005【总页数】5页(P58-62)【关键词】高速铁路;缓和曲线;线型;运营;性能【作者】许国平;李秋义【作者单位】中南大学土木建筑学院,湖南长沙,410075;中南大学土木建筑学院,湖南长沙,410075【正文语种】中文【中图分类】U2目前,国外高速铁路的最高运营速度已经超过了300 km/h,速度目标值为350 km/h的高速铁路也正在筹划之中。
高速铁路技术的发展和运营速度的不断提高,对缓和曲线线型及其运营性能提出了更高的要求。
德国高速铁路缓和曲线对外轨超高顺坡率做出了严格的限制,并采用较大长度的缓和曲线以适应高速行车的要求。
我国高速铁路建设已列入议事日程,高速铁路缓和曲线线型的比选已成为铁路部门十分关注的课题。
长期以来,缓和曲线选型的一般原则是希望在满足同等运行安全度和平稳性的条件下,尽量缩短缓和曲线的长度,以减少工程数量。
前苏联学者沙湖年慈最早奠定了缓和曲线的基本理论——建立了缓和曲线的5个基本条件(见表1)。
表1 缓和曲线的5个基本条件序号曲线要素ZH点HY点ZH点~HY点1纵坐标y0y02偏角φ0φ03曲率k01/R4dk/dl005d2k/dl200连续渐增连续变化表1中满足1、2、3基本条件的缓和曲线称为直线型外轨超高顺坡缓和曲线,例如放射螺旋线、三次抛物线都是直线型外轨超高顺坡缓和曲线。
长期的运营实践表明,直线型外轨超高顺坡缓和曲线存在许多缺点和弊端,直缓点地段的线路不够稳定。
在《京沪高速铁路设计暂行规定》技术咨询中,国外专家对改善型三次抛物线缓和曲线提出了异议,并重点推荐了一波正弦型缓和曲线,说明高速铁路缓和曲线问题值得进一步研究。
提速线路缓和曲线线性变化对旅客舒适度的影响分析
提速线路缓和曲线线性变化对旅客舒适度的影响分析提速线路缓和曲线线性变化对旅客舒适度的影响分析引言:随着城市快速发展和经济增长,高速铁路成为现代交通运输的重要组成部分。
然而,高速铁路的舒适度一直是乘客关注的焦点。
本文针对提速线路的缓和曲线线性变化,对其对旅客舒适度的影响进行分析和探讨。
一、提速线路的缓和曲线变化及其目的提速线路的缓和曲线线性变化,即为了减少直线轨道与曲线轨道之间的过渡变化而设置的曲线,以提高列车行驶速度和运行稳定性。
提速线路的缓和曲线变化有以下几个目的:1. 减少列车行驶时的离心力,减轻对乘客的影响。
2. 提高列车的行驶速度,缩短旅行时间,提升乘客的出行效率。
3. 减少列车运行时的振动和噪音,提升乘客的乘坐舒适度。
二、提速线路缓和曲线线性变化对旅客舒适度的影响1. 减少离心力的影响提速线路的缓和曲线线性变化可以减少列车行驶时的离心力对旅客的影响。
离心力会使乘客感到身体倾斜和摇晃,给乘坐体验带来不适感。
缓和曲线的设计能够在减少离心力的同时,平稳地过渡列车的行驶方向,使乘客的身体感受更加舒适和稳定。
2. 提高行驶速度和乘坐效率提速线路的缓和曲线线性变化可以提高列车的行驶速度,缩短旅行时间,提升乘客的出行效率。
传统的曲线轨道设计会限制列车的速度,而缓和曲线的设计减少了列车行驶时的冲击和摆动,可以更快地行驶。
乘客在高速行驶的列车上可以更快地到达目的地,提升了他们的出行便利性和效率。
3. 减少振动和噪音的干扰提速线路的缓和曲线线性变化可以减少列车运行时产生的振动和噪音,提升乘客的乘坐舒适度。
列车在直线轨道上行驶时,由于突然转弯将产生较大的振动和噪音,给乘客造成不适感。
而缓和曲线的设计可以逐渐过渡列车的行驶方向,减少振动和噪音产生的瞬时冲击,使乘客的乘坐环境更加安静和舒适。
三、提速线路缓和曲线线性变化的应用和展望提速线路缓和曲线线性变化已经得到广泛应用,为高速铁路的建设和发展提供了重要支持。
随着技术的不断进步,这一设计将继续发展和完善,为旅客提供更加舒适、安全和高效的出行体验。
一种新型道路缓和曲线的线形分析与评价
建 立 5种 不 同工况 , 平 、 、 三方 面考虑 , 从 纵 横 采用 车体未 被平 衡横 向加速 度 及其 时变 率 为评 价指 标 , 对新 型 缓和 曲线 和 回旋 线进 行 了行驶 动力 学性 能评 价 , 通过 比较分 析得 出这 种新 型缓 和 曲线在 行驶 动力 学性
能 上 明显优 于 回旋线 , 为高 速公路 缓和 曲线 的线形选 择提 供参考 。
1 缓 和 曲线 方程 式 推 导 过 程
1 1 缓和 曲线 曲率方 程通式 .
根据缓 和 曲线 曲率 边界 条件 , 出缓 和 曲线 曲率 的微分 方程 式 。 列
( ) 界条件 为 1边
=
=0 ( ,i=0 12 … ,) 构造相 应 的曲率微 分方 程 ( =2 ,,, n 。 N n+2 )
k =口 +0Z+0 +口| 1 2 3 4j+… +0 f_ f Ⅳ ‘
式 中, 0 ,,n , , 为待定 系数 , 等 于缓 和 曲线 曲率边 界 条件个 数 。 口 ,:a , … 口
七” = , , , 一 ) / , … ” () 1
(边 条 为 : :, :, 件 ’ 0 0,… ;) fR = ( 0 ,… ,为 ) ( 1 k / J l, 2 ( J 0_
u ) u
第 3期
李木 松等 : 一种 新型道 路缓和 曲线 的线形 分析 与评价
k ( :
.
1 5
() 2
() 3
厂 Zk k , , ‘ ) (, , … kⅣ ’ l
高速公路线路(缓和曲线、竖曲线、圆曲线、匝道)
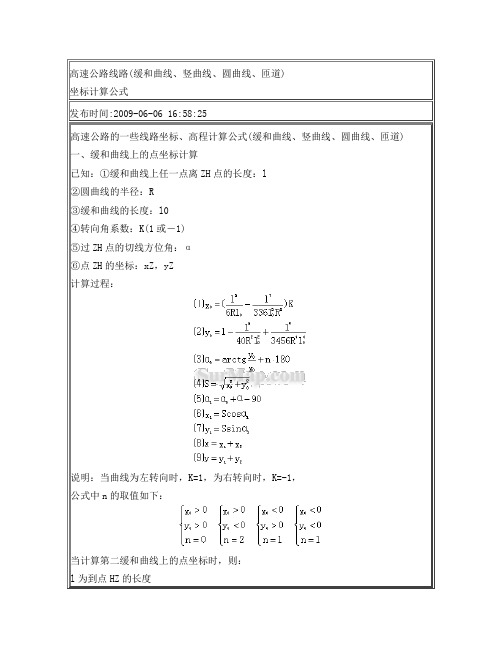
高速公路线路(缓和曲线、竖曲线、圆曲线、匝道)坐标计算公式发布时间:2009-06-06 16:58:25高速公路的一些线路坐标、高程计算公式(缓和曲线、竖曲线、圆曲线、匝道) 一、缓和曲线上的点坐标计算已知:①缓和曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当计算第二缓和曲线上的点坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与计算第一缓和曲线时相反xZ,yZ为点HZ的坐标切线角计算公式:二、圆曲线上的点坐标计算已知:①圆曲线上任一点离ZH点的长度:l②圆曲线的半径:R③缓和曲线的长度:l0④转向角系数:K(1或-1)⑤过ZH点的切线方位角:α⑥点ZH的坐标:xZ,yZ计算过程:说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下:当只知道HZ点的坐标时,则:l为到点HZ的长度α为过点HZ的切线方位角再加上180°K值与知道ZH点坐标时相反xZ,yZ为点HZ的坐标三、曲线要素计算公式公式中各符号说明:l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度l2——第二缓和曲线长度l0——对应的缓和曲线长度R——圆曲线半径R1——曲线起点处的半径R2——曲线终点处的半径P1——曲线起点处的曲率P2——曲线终点处的曲率α——曲线转角值四、竖曲线上高程计算已知:①第一坡度:i1(上坡为“+”,下坡为“-”)②第二坡度:i2(上坡为“+”,下坡为“-”)③变坡点桩号:SZ④变坡点高程:HZ⑤竖曲线的切线长度:T⑥待求点桩号:S计算过程:五、超高缓和过渡段的横坡计算已知:如图,第一横坡:i1第二横坡:i2过渡段长度:L待求处离第二横坡点(过渡段终点)的距离:x求:待求处的横坡:i解:d=x/Li=(i2-i1)(1-3d2+2d3)+i1六、匝道坐标计算已知:①待求点桩号:K②曲线起点桩号:K0③曲线终点桩号:K1④曲线起点坐标:x0,y0⑤曲线起点切线方位角:α0⑥曲线起点处曲率:P0(左转为“-”,右转为“+”)⑦曲线终点处曲率:P1(左转为“-”,右转为“+”)求:①线路匝道上点的坐标:x,y②待求点的切线方位角:αT计算过程:注:sgn(x)函数是取符号函数,当x<0时sgn(x)=-1,当x>0时sgn(x)=1,当x=0时sgn(x)=0。
高速公路路线中缓和曲线长度取值分析与研究
高速公路路线中缓和曲线长度取值分析与研究摘要:高速公路线形设计水平对公路工程建设规模、施工质量及造价有着较大影响,尤其是受地形和环境制约较大的公路项目,对设计人员优化路线线形设计提出了更高要求。
本文在阐述缓和曲线形式的基础上,针对高速公路项目中沟谷深切、地形陡峭路段,以及从驾驶员反应及操作时间、超高渐变率、离心加速度变化率、视觉条件等方面进行高速公路路段缓和曲线最小长度的计算。
关键词:高速公路;路线设计;缓和曲线长度引言:缓和曲线是设置在公路圆曲线和直线间或半径相差较大、转向相同的圆曲线间的曲率持续变化的曲线形式。
当前,在进行公路线形设计时,对缓和曲线长度的确定方法并不统一,可以按照《公路路线设计规范》(JTG D20—2017)中所规定的最小长度确定,也可根据视觉需要采用R/9缓和曲线长度,还可忽略地形、地物影响而设置过程化的缓和曲线。
在进行公路路线中缓和曲线设计时,须保证缓和曲线长度取值的准确,若长度过短,既无法起到曲率渐变的效果,又会影响缓和段与圆曲线段衔接的协调性,还会影响行车的视觉效果;相反,若缓和曲线长度过长,则不利于线形组合效果。
为此,须在公路平面线形设计中合理确定缓和曲线长度。
1.缓和曲线的形式我国高速公路设计中缓和曲线一般采用回旋线形式,这种形式下,曲率随车辆的行驶而逐渐变化。
缓和曲线的基本形式,见图1。
图1 缓和曲线基本形式按照《公路路线设计规范》(JTG D20—2017)及《公路工程技术标准》(JTG B01—2014)的相关规定,当公路平面线形设计中曲线半径超出一定范围时可不设置缓和曲线,缓和曲线的最小长度须满足表1的规定。
表1 缓和曲线最小长度1.基于工程实例的缓和曲线长度确定2.1 缓和曲线最小长度的确定基于驾驶员反应及操作时间计算按照《公路路线设计规范》(JTG D20—2017),驾驶员操作车辆所需的长度就是规范中所规定的最小缓和曲线长度。
同时,根据规范,在缓和曲线上操作车辆的时间至少需要 3s,这一长度和行车速度成正比,即设计行车速度越大,缓和曲线也越长。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
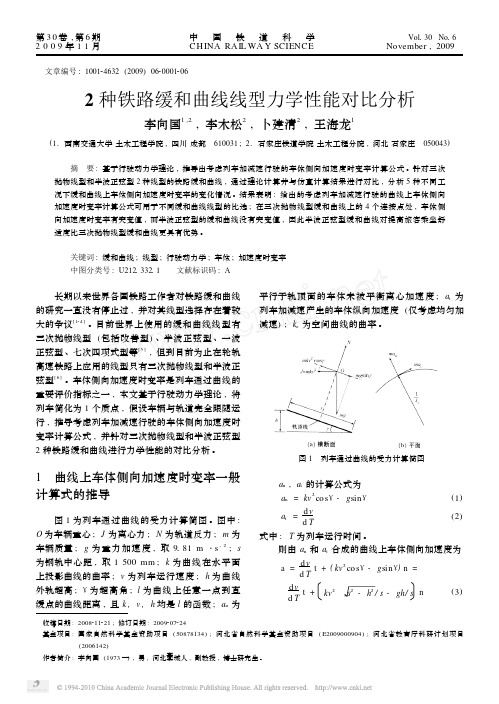
!f -_ d e A 4 ? @ : 4 N \ Q UO R_ W Q _ W Q O ] ZO g h Q W M T X Q U Z R N iM T T ‘ ] h M R Y W M \ b N b Q ] Q j b X O ] Q \ _ W Q ] Q X N _ M O Rk Q _ PQ Q R_ W Q \ W N b Q O g _ ] N R \ M _ M O RT ‘ ] h QN R U_ W Q\ N g Q _ ZN R UT O ig O ] _O g h Q W M T X QT ‘ ] h QR Q Y O _ M N _ M O R N R Ub ] O h M U Q \_ W Q O ] Q _ M T N X Q h M U Q R T Qg O ] $ 1 T W O M T QO g _ ] N R \ M _ M O RT ‘ ] h QM Rl ‘ N \ M W M Y W\ b Q Q UN R UW M Y W\ b Q Q U] N M X PN Z \ !l $ /W /h /\ /_ m= 7 H 8 ? 6 A ‘ N \ M W M Y W\ b Q Q U] N M X PN Z M Y W\ b Q Q U] N M X PN Z Q W M T X QU Z R N iM TT ‘ ] h M R Y N g Q _ ZN R UT O ig O ] _ ] N R \ M $ _ M O RT ‘ ] h Q " # #多年来世界各国铁路工作者对 缓 和曲 线 的 研 提出了很多新型的线型 还进行了 究一直没有停止过 曲线型缓和曲线的试铺工作 . 普遍接受的观点是普速 铁路采用 &次螺旋缓和曲线即可满足要求 但是 准高 速铁路和高速铁路是否铺设高次缓和曲线在学术界和 工程界存在着争论 . 本 文采 用 车 辆 动 态 曲 线 通 过 理 论 按现行线路设 计 标 准 给出两个完整 曲 线 一个为准高速车通过( " ’ # 另一个为高速车通过( 选择影响 * ) + #n * n io W io W 比 较 大 的 ’种缓和曲线 以 ’个 安 全 和 舒 适 度 指 标 为 评价依据 通过计算机仿真 研究车辆曲线通过安全和 为准高速 , 高速铁路 舒适与缓和曲线线型之间的关系 缓和曲线线型选择作出评价 . 曲率均要连续变化 三者中先确定一个 其余两个随之 确定 . 立面上 从q r 点到 rs 点外轨超高及相应的超 高角也要连续变化 .为了使列车以均衡速度 y 通过整 要 个 缓和 曲线范 围内均 能 保 持 离 心 力 和 向 心 力 相 等 求 缓 和 曲 线 的 平 面 曲 率 z和 立 面 的 外 轨 超 高 {成 比 ) 例即{ 它 将 立 面 超 高 {与 平 面 曲 率 z联 |" " 1 % yz 系起来 . 缓和曲线是一个空间连续变化的三维曲线 列 车通过时将产生横向和竖向空间耦合振动 . p 1 } 轮对运动描述 如图 "所示 建立 +个坐标系描述轮对的运动 . 定坐标系 ~ 也即大地 . ! ~" ~z ~轨 道 水 平 面 坐 标 系 #! 均位于水平 ! " #" #z ##, # 面 内沿 轨 道 中 心 线 在 水 平 面 上 投 影 的 切 线 方 向! # 垂直于轨 道中心 线 按 右 手 规 则 确 定位于铅垂 " z # # 方 向该 坐 标 系 以 速 度 y沿 轨 道 中 心 线 移 动相对于
要 !采 用 车 辆 动 态 曲 线 通 过 理 论 研究了车辆曲线通过安全和舒适度与缓和曲线线型之间的关系为准高
速, 高速铁路缓和曲线线型选择提供了理论依据 . 关键词 !准高速铁路 /高速铁路 /车辆动态曲线通过 /安全和舒适 /缓和曲线 中图分类号 !0) " ) 1 & & ) 文献标识码 !2
标系 Q + Q1 Q2 Q 的角速 度 - 为建立 轮对运 动微 分方程 时 方便 * 在式 $^( 式 $d( 中所使用的坐标系各不相同 /
图 ! 轮对运动描述坐标系
沿轨道中心线的切线 方 向 -./ "# $ & ’ ( & * % # ) + .!/ , , 实际上是同一点 * 位于轨道中心线上 * 在图 !中分开是 为了表示方便 轮 对 坐 标 系 0+ 其坐标原点位于轮对质 01 02 0* 心* 1 + 2 0 沿轮轴方向固结于轮对上 * 0/ 0 轴不受车轮转 动的影响 - 当轮对 处 于 对 中 位 置 时 * + 1 2 0/ 0/ 0 方向分 别与 + 此 时轮 对 坐 标 系 原 点 相 对 于 1 2 ,/ ,/ , 方 向一 致 * 4 轨道坐标系的位置矢量为 3 其中 5 2 0 "5 6 ,* 6 为 车 轮名 4 当车轮离开对中位置时 * 义滚动半径 7 3 0 "8 0+ ,9: 01 , 为 轮 对 的 平 动 分 量 其 转 动 9$ 9; * 5 2 8 : ; 6 0( ,* 0/ 0/ 0
$’( 根据上面所建立的坐标系及相互之间的转换关 系* 由高等动力 学中角 速 度 加 法 公 式 及 刚 体 上 动 点 加 速度的计算公式 * 推导中略去一些高阶小量 * 得轮对加 速度和角速度 $ ! & X ( V9’W YH5$ # S 9 Q 8 : > RT 0 "U 0 0 6 W K L X # Z Nhomakorabea[
给出$ 需注意 > , + ,1 ,2 , 之 间 的 变 换 关 系 由 式 $!( %的 转 向* 式 $!( 中 考 虑 了 它 的 转 向* 计算中取正值输 入( 轨道坐标系 , 7 + ,1 ,2 , 与轮对坐标系 0+ 01 02 0 之间 的变换关系由式 $’( 给出 F G > HG I J > G I J > G I J > E F G > ,C % % K L % K L .C @+ M E O @+ 6 E F G > G I J > ?1 B" ?1 , K L K L .B A2 D NH G P A2 D I J > HE F G > G I J > F G > E F G > , % % K L E % K L . $!(
0C ,C F G < G I J < 6O @+ M E @+ ?1 " HE F G > G I J < E F G > E F G < G I J >?1 B 0B , P A2 D N G A2 D I J > G I J < HG I J > E F G < E F G > 0 ,
j 车辆通过的曲线
第) &卷第 )期 )##"年 -月
铁
道
学
报
,O X 1 ) & JO 1 ) 2b ] M X ) # # "
3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3 3
万方数据
轨道坐标系 ( 它由轨道水平面坐标系旋转 ! (" (z (得到先绕 ! 轴转 动 ) 角得到 坐标 系 #" ! ) * + * + # # " # z # " " "
为外轨超高角 再绕 " 轴转动 ) 得到 ( ( * ! _ N R ) { { # (" (z ("
| ’
铁
道
学
报
第’ ^卷
’ \ W[ # $ ! & X ( VH W H’W YH ’ > 9> ( 9W : + : 8 K L % 0] ,9U 0 0 X # Z X X \ # $ ! & X ( W[ 万方数据 H 5$ > HW >H’ >( 6 K L
按现行线路设计标准给出两个完整曲线 * 由直线 i 缓和曲线 i 圆曲线 i 缓和曲线 i 直线构成 图’ 为准高 $ ( k 速 车通 过 * 图中缓 和曲 线长度 ! 圆 曲线超 高 ! ’ 6l/ 6 m 是 目前 广深 线最小 半径曲 线的 实际设 置 参 数 7 图 ll* 为 高速 车通 过 * 选择 o种影响 比较大 的 缓 和 曲 线 ’ $ ( n 进行车辆通过动力学仿真比较 * 它们是 p q ^次 螺旋 曲 线* 曲线 $ rs u d i d曲线 ( * v m次曲 线 * w e次曲线 * x t 三角 y 形 $ 半波正弦 ( 全波正弦 ( * z 三角 { 形 $ -
= 为先绕 2 再绕新坐标系的 + * , 轴转动 < , 轴转动 > 轨 道 水 平 面 坐 标 系 .+ .1 .2 . 与 轨 道 坐 标 系
为车轮滚动角 & * a为 车 轮 名 义 滚 动 角 速 度* a" W 5 b 6 速度扰动值 车轮踏面为锥形 * 车轮与钢轨始终保持接触 * 轮对 和转向架之间以及转向架和车体之间用线性弹簧和粘 性阻尼元件连接 * 对轮对 / 转向架 / 车体进行受力分析 * 由牛顿第二定理和相对质心的动量矩定理得到各自的 运动微分方程 以两轴客车为例 * 整个车辆系统共考虑 ’ e个广义坐标 f g h 数值计算方法 本 文 选 择 四 阶 龙 格i 库 塔 法* 这 是 因 为 龙 格i 库塔 法 不要 求把微 分方程 整 理 成 标 准 形 式 * 只要求把二阶 微 分方 程转化 为一阶 * 其积分模式与本文使用的微分 方程形式很适应 -积分步长为 6 g 6 6 6!G -轮轨接触几 接触椭 圆 / 蠕滑 系 数 / 曲线轨道参数的计算编制成 何/ 子程序 * 供每一步积分调用 轮轨法向力迭代直至收敛 为止 -