单片机中汽车灯光控制系统实验报告
单片机模拟汽车信号灯实训报告
沈阳理工大学应用技术学院单片机原理及应用实训报告题目单片机实训院系能源工程系专业弹药工程与爆炸技术学生姓名孙兹超学号指导教师殷老师完成日期2012年07月06日一.系统设计实训题目:汽车信号灯设计1.实训目的通过实训掌握并行I/O口的使用和软件延时法的应用,掌握多分支程序的设计方法。
2. 实训要求用发光二极管模拟汽车信号灯,用逻辑电平开关模拟控制开关,设计一个汽车信号灯控制系统。
实验箱晶振频率。
具体要求如下:(1)正常驾驶时,接通左转弯开关,左转弯灯、左头灯、左尾灯同时闪烁;接通右转弯开关,右转弯灯、右头灯、右尾灯同时闪烁,闪烁频率为2Hz。
(2)刹车时,接通刹车开关,左尾灯、右尾灯同时亮。
(3)停靠站时,接通停靠开关,左头灯、右头灯、左尾灯、右尾灯同时闪烁,闪烁频率为2Hz。
(4)出现紧急情况时,接通紧急开关,左转弯灯、右转弯灯、左头灯、右头灯、左尾灯、右尾灯同时闪烁,闪烁频率为10Hz。
3. 设计思路用八位逻辑电平输出模块的前五位开关做发光二极管的控制开关,用电平显示模块的LED7、LED6、LED5分别代表汽车的左转弯灯、左头灯、左尾灯。
用LED2、LED1、LED0分别代表右转向灯、右头灯、右尾灯。
注意:由于K5、K6、K7未用到,初始化为高电平。
如改变为低电平,程序无法正常使用。
延迟时间是由DJNZ命令来控制的,此命令执行需要两个机器周期,即2μs。
用此命令的执行次数来控制执行时间,来达到实验题目所要求的闪烁频率。
二.硬件设计1.硬件设计方法用P1口作输入口,用8P数据线连接CPU的P1口和八位逻辑电平输出模块,控制二极管的亮与灭。
用P0口作输出口,用8P数据线连接CPU的P0口和八位逻辑电平显示模块,输出二极管的闪烁频率。
用串行数据通信线连接计算机与仿真器,并将USB线连接到计算机和仿真器,把仿真头插到模块的锁紧插座中,实现软件控制硬件。
2.实验电路13131313131133312222222265321874K0K1K2K3K4K5K6K7P 1.7P0.0P 1.6P0.1P 1.5P0.2P 1.3P0.4P 1.4P 0.3P 1.2P 0.5P 1.1P 0.6P1.0P 0.7D 0Q 0D1Q1D 2Q 2D3Q 3D 4Q 4D5Q 5D 6Q6D 7Q 745678932RP2E5510RP1E510KU274LS573U189C511918171615141312L E D0LE D 2LE D 4L E D 6LE D 1L E D 3L E D 5L E D7GNDGNDG N D 10111203938373635343332O EV C CL E3.实验照片三.软件设计1.主程序流程图2.延时子程序流程图3.源程序ORG 0000HLJMP MAINORG 0030HMAIN:MOV P0,#0FFHMOV P1,#0FFHLOOP0:MOV A,P1CJNE A,#0FEH,LOOP1MOV 50H,#04HMOV P0,#1FHACALL SHIJIANMOV P0,#0FFHACALL SHIJIAN LOOP1:CJNE A,#0FDH,LOOP2 MOV 50H,#04HMOV P0,#0F8HACALL SHIJIANMOV P0,#0FFHACALL SHIJIAN LOOP2:CJNE A,#0FBH,LOOP3 MOV P0,#0DEH LOOP3:CJNE A,#0F7H,LOOP4 MOV 50H,#04HMOV P0,#9CHACALL SHIJIANMOV P0,#0FFHACALL SHIJIAN LOOP4:CJNE A,#0EFH,LOOP5 MOV 50H,#01HMOV P0,#18HACALL SHIJIANMOV P0,#0FFHACALL SHIJIANLOOP5:CJNE A,#0FFH,LOOP0MOV P0,#0FFHLJMP LOOP0SHIJIAN:MOV R6,#0FFHMOV R7,#0FFHMOV R5,50HDINGSHI:DJNZ R7,DINGSHIDJNZ R6,DINGSHIDJNZ R5,DINGSHIRETEND四.总结一周的单片机实训结束了,在我和我们组的组员的共同努力下,在老师的指导和同学的帮助下,我们成功的完成了汽车信号灯控制系统的设计任务。
汽车灯光系实训报告

一、实训背景随着汽车行业的快速发展,汽车灯光系统作为汽车的重要组成部分,其安全性和功能性越来越受到重视。
为了提高学生对汽车灯光系统的认识和操作技能,本实训课程针对汽车灯光系统进行了一系列的实验和操作训练。
二、实训目的1. 了解汽车灯光系统的基本组成和工作原理;2. 掌握汽车灯光系统的维护和检修方法;3. 培养学生的动手能力和实际操作技能;4. 提高学生对汽车灯光系统的安全意识和责任感。
三、实训内容1. 汽车灯光系统概述(1)汽车灯光系统的组成:汽车灯光系统主要由前照灯、雾灯、转向灯、尾灯、牌照灯、仪表灯、车内照明灯等组成。
(2)汽车灯光系统的工作原理:汽车灯光系统通过电源向灯光提供电能,使灯光发光,实现照明、信号、警示等功能。
2. 汽车灯光系统的维护(1)定期检查灯光系统的完整性,确保无损坏、无松动现象。
(2)定期检查灯光亮度,如发现亮度不足,应及时更换灯泡。
(3)定期检查灯光的清洁度,确保灯光清晰可见。
(4)定期检查灯光系统的线路,防止短路、漏电等故障。
3. 汽车灯光系统的检修(1)检查灯泡是否损坏,如有损坏,应及时更换。
(2)检查灯光线路是否接触良好,如有松动、老化现象,应及时修复。
(3)检查灯光系统是否短路,如有短路现象,应及时排除。
(4)检查灯光系统是否漏电,如有漏电现象,应及时修复。
4. 汽车灯光系统的故障诊断与排除(1)根据灯光系统的故障现象,初步判断故障原因。
(2)使用诊断仪器对灯光系统进行检测,确定故障点。
(3)针对故障点进行维修,排除故障。
四、实训过程1. 实训准备(1)了解实训课程内容和要求。
(2)熟悉实训设备和工具的使用方法。
(3)分组进行实训,明确各成员的职责。
2. 实训实施(1)讲解汽车灯光系统的基本组成和工作原理。
(2)指导学生进行灯光系统的维护和检修。
(3)进行灯光系统的故障诊断与排除实验。
(4)学生分组进行实际操作,教师进行指导。
3. 实训总结(1)学生汇报实训过程中的心得体会。
单片机汽车尾灯课程设计报告
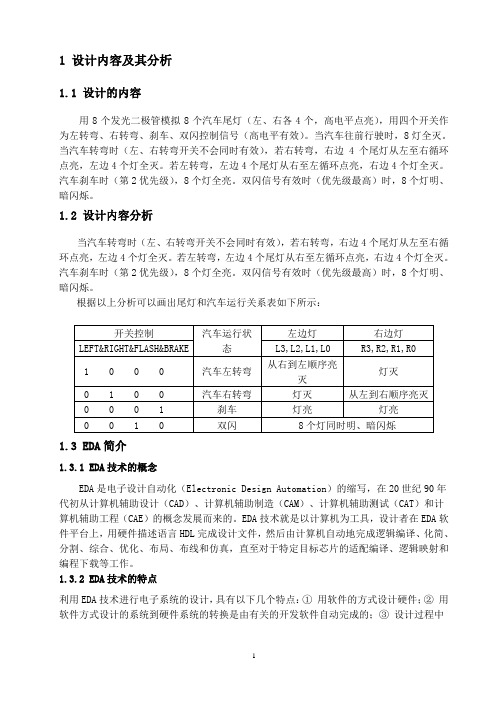
1 设计内容及其分析1.1 设计的内容用8个发光二极管模拟8个汽车尾灯(左、右各4个,高电平点亮),用四个开关作为左转弯、右转弯、刹车、双闪控制信号(高电平有效)。
当汽车往前行驶时,8灯全灭。
当汽车转弯时(左、右转弯开关不会同时有效),若右转弯,右边4个尾灯从左至右循环点亮,左边4个灯全灭。
若左转弯,左边4个尾灯从右至左循环点亮,右边4个灯全灭。
汽车刹车时(第2优先级),8个灯全亮。
双闪信号有效时(优先级最高)时,8个灯明、暗闪烁。
1.2 设计内容分析当汽车转弯时(左、右转弯开关不会同时有效),若右转弯,右边4个尾灯从左至右循环点亮,左边4个灯全灭。
若左转弯,左边4个尾灯从右至左循环点亮,右边4个灯全灭。
汽车刹车时(第2优先级),8个灯全亮。
双闪信号有效时(优先级最高)时,8个灯明、暗闪烁。
根据以上分析可以画出尾灯和汽车运行关系表如下所示:1.3 EDA简介1.3.1 EDA技术的概念EDA是电子设计自动化(Electronic Design Automation)的缩写,在20世纪90年代初从计算机辅助设计(CAD)、计算机辅助制造(CAM)、计算机辅助测试(CAT)和计算机辅助工程(CAE)的概念发展而来的。
EDA技术就是以计算机为工具,设计者在EDA软件平台上,用硬件描述语言HDL完成设计文件,然后由计算机自动地完成逻辑编译、化简、分割、综合、优化、布局、布线和仿真,直至对于特定目标芯片的适配编译、逻辑映射和编程下载等工作。
1.3.2 EDA技术的特点利用EDA技术进行电子系统的设计,具有以下几个特点:①用软件的方式设计硬件;②用软件方式设计的系统到硬件系统的转换是由有关的开发软件自动完成的;③设计过程中可用有关软件进行各种仿真;④系统可现场编程,在线升级;⑤整个系统可集成在一个芯片上,体积小、功耗低、可靠性高。
因此,EDA技术是现代电子设计的发展趋势。
1.3.3 EDA设计流程典型的EDA设计流程如下:1、文本/原理图编辑与修改。
汽车灯光系统的实训报告
一、实训目的通过本次实训,使学生了解汽车灯光系统的基本组成、工作原理及维修方法,掌握汽车灯光系统的调试与故障诊断技术,提高学生的实际操作能力。
二、实训时间2022年X月X日至2022年X月X日三、实训地点汽车维修实训室四、实训内容1. 汽车灯光系统概述(1)汽车灯光系统的作用汽车灯光系统是汽车的重要组成部分,主要作用是提供照明、信号和装饰等功能。
照明功能包括道路照明、车内照明等;信号功能包括转向信号、制动信号、危险信号等;装饰功能包括车身装饰、车标照明等。
(2)汽车灯光系统的组成汽车灯光系统主要由以下几部分组成:1)照明系统:包括前照灯、前雾灯、后雾灯、车内照明灯、仪表照明灯等。
2)信号系统:包括转向信号灯、制动信号灯、危险信号灯、倒车灯等。
3)控制单元:包括灯光开关、继电器、传感器等。
4)电源:包括蓄电池、发电机等。
2. 汽车灯光系统实训(1)实训内容1)观察汽车灯光系统实物,了解其组成及各部件的功能。
2)学习汽车灯光系统电路图,掌握各部件之间的连接关系。
3)学习汽车灯光系统的工作原理,了解各部件之间的协同作用。
4)进行汽车灯光系统调试,包括灯光亮度调节、灯光角度调整等。
5)进行汽车灯光系统故障诊断,包括灯光不亮、灯光闪烁、灯光异常等。
(2)实训步骤1)观察汽车灯光系统实物,了解其组成及各部件的功能。
2)学习汽车灯光系统电路图,掌握各部件之间的连接关系。
3)学习汽车灯光系统的工作原理,了解各部件之间的协同作用。
4)进行灯光亮度调节实训:①打开汽车电源,检查灯光开关是否正常。
②调节灯光亮度旋钮,观察灯光亮度是否发生变化。
③调整灯光亮度,使其达到规定要求。
5)进行灯光角度调整实训:①打开汽车电源,检查灯光开关是否正常。
②调整灯光角度调节机构,观察灯光角度是否发生变化。
③调整灯光角度,使其达到规定要求。
6)进行汽车灯光系统故障诊断实训:①观察灯光不亮现象,分析故障原因。
②检查相关部件,如灯泡、电路等。
汽车转弯灯单片机实习报告
汽车转弯灯单片机实习报告汽车转弯灯单片机控制系统实习报告一、实习目的1、掌握51系列单片机的常用指令。
2、熟练的编写51系列单片机的分支程序和一些子程序,如延时子程序。
二、实习要求模拟汽车在驾驶中的左转弯、右转弯、刹车、合紧急开关、停靠等操作。
在左转弯或右转弯时,通过转弯操作杆使左转弯或右转弯开关合上,从而使左头信号灯、仪表板的左转弯灯、左尾信号灯或右头信号灯、仪表板的右转弯信号灯、右尾信号灯闪烁;闭合紧急开关时以上六个信号灯全部闪烁;汽车刹车时,左右两个尾信号灯点亮;若正当转弯时刹车,则转弯时原闪烁的信号灯应继续闪烁,同时另一个尾信号灯点亮,以上闪烁的信号灯以1Hz频率慢速闪烁;在汽车停靠开关合上时左头信号灯、右头信号灯、左尾信号灯、右尾信号灯以10Hz频率快速闪烁。
任何在下表中未出现的组合,都将出现故障指示灯闪烁,闪烁频率为10Hz。
数码管正常情况下显示操作功能的所写,故障情况显示“HELP”三、实习设计原理1、8051单片机的功能单片机是集CPU、 RAM、 ROM(或EPROM)、 I/O接口、定时器/计数器、中断系统为一体完整的计算机系统。
8051内部含有8位CPU、4KB的ROM和128B的RAM、4个8位I/O接口电路、一个全双工的异步接口、5个终端源和2个中断优先级。
2、单片机各引脚介绍(1) VCC:电源。
(2) GND:接地。
(3) P0口:是一个8位漏极开路的双向I/O口。
(4) P1口:是一个具有内部上拉电路的8位双向I/O口。
(5) P2口:是一个具有内部上拉电路的8位双向I/O口。
(6) P3口:是一个具有内部上拉电路的8位双向I/O口,P3输出缓冲器能吸入/放出4个TTL输入。
Flash 编程及检验时,P3口也接收一些控制信号。
(7) RST:复位端。
当振荡器工作时,此时高电平将系统复位。
(8) XTAL1:振荡器反向放大器输入端和内部时钟发生器的输入端。
XTAL2:振荡器反相放大器输出端。
单片机中汽车灯光控制系统实验报告
《单片机原理与应用》课程大作业项目名称:汽车灯光控制系统专业班级:智能监控121学号: 120516127姓名:朱小柳职业技术学院信息工程学院2013 年 10 月 27 日摘要随着单片机的日益发展,其应用也越来越广泛,通过对“汽车灯光控制系统”设计,可以对单片机的知识得到巩固。
本设计是设计一个单片机控制系统。
在汽车进行左右转向灯、前主灯、倒车灯、故障灯时,实现对各种信号指示灯的控制。
本设计主要是对单片机的并行输入、输出口电路的应用,通过对I/O口控制发光二极管的亮、灭、闪烁,加上一些复位电路、按键电路、驱动电路来模拟汽车尾灯的功能。
关键词单片机;汽车信号灯;电路基础;绪论车灯是行车安全的必备件,除了具有照明作用,对行人和其他车辆还具有转向、会车、刹车等警示作用。
其中汽车转向灯的控制就是一例。
汽车转向和报警信号灯是汽车运动方向和车身状态的表示信号,关系着汽车的安全问题,因此基于单片机的汽车转向灯控制器的一直以来都是汽车电子设计中的一个十分重要的领域。
此次基于单片机的汽车转向灯的设计中,复位电路的设计、LED发光二极管的应用、4个按键开关、键盘扫描来控制LED灯点亮的方式都基本符合课程设计的要求。
其中复位电路的作用是当单片机死机的情况下用来复位重启单片机,软件部分主要是用键盘扫描的方式来与程序中的设定值比较如果一致就执行该段子程序来实现LED的点亮方式。
汽车上的信号灯有:转向灯(左前灯、右前灯、仪表盘上的二个指示灯)。
当汽车转弯、倒车、停靠时,转向灯发出不同的信号。
目前国广泛使用电热式闪光器产生闪光信号。
闪烁频率在 50~110 次/ min,但是一般控制在 60~95 次min 之间。
闪光器是通过调节镍铬丝的拉力和触点的间隙来满足频率要求的,灯泡功率的大小也会影响闪烁频率。
因此在更换闪光器或灯泡时调整比较困难。
同时,系统没有故检测,驾驶员无法知道车外的转向灯与示宽灯是否点亮,从而影响行车安全。
到目前为止,我们还没有发现能检测灯丝断这种故障的有效方法。
单片机实验---汽车转向灯控制
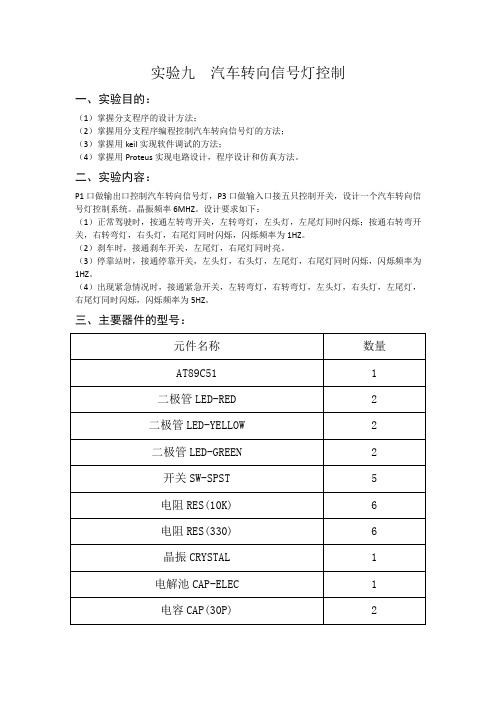
实验九汽车转向信号灯控制一、实验目的:(1)掌握分支程序的设计方法;(2)掌握用分支程序编程控制汽车转向信号灯的方法;(3)掌握用keil实现软件调试的方法;(4)掌握用Proteus实现电路设计,程序设计和仿真方法。
二、实验内容:P1口做输出口控制汽车转向信号灯,P3口做输入口接五只控制开关,设计一个汽车转向信号灯控制系统。
晶振频率6MHZ。
设计要求如下:(1)正常驾驶时,按通左转弯开关,左转弯灯,左头灯,左尾灯同时闪烁;按通右转弯开关,右转弯灯,右头灯,右尾灯同时闪烁,闪烁频率为1HZ。
(2)刹车时,接通刹车开关,左尾灯,右尾灯同时亮。
(3)停靠站时,接通停靠开关,左头灯,右头灯,左尾灯,右尾灯同时闪烁,闪烁频率为1HZ。
(4)出现紧急情况时,接通紧急开关,左转弯灯,右转弯灯,左头灯,右头灯,左尾灯,右尾灯同时闪烁,闪烁频率为5HZ。
三、主要器件的型号:四、实验参考电路:实验时用发光二极管替代信号灯,P1.7------P1.2接发光二极管的阴极,P1口的管脚输出低电平时对应的发光二极管点亮。
控制开关的信号通过P3.4-------P3.0送入单片机,设控制开关输出低电平有效。
汽车转向信号控制灯控制电路如下图所示:五、实验参考程序:ORG 0000HLJMP MAINORG 0030HMAIN: MOV P3,#0FFHMOV A,P3 // 读P3口输入数据JNB ACC.4,JJ // ACC.4=0,转移到紧急状态JNB ACC.3,TK // ACC.3=0,转移到停靠状态JNB ACC.2,SC // ACC.2=0,转移到刹车状态JNB ACC.1,YZW // ACC.1=0,转移到右转弯状态JNB ACC.0,ZZW // ACC.0=0,转移到左转弯状态SJMP MAINJJ: MOV P1,#03H // 紧急状态LCALL DELAY1 // 0.1秒延时MOV P1,#0FFH // 信号灯全灭LCALL DELAY1SJMP MAINTK: MOV P1,#0C3H // 停靠状态LCALL DELAY2 // 0.5秒延时MOV P1,#0FFH // 信号灯全灭LCALL DELAY2SJMP MAINSC: MOV P1,#0F3H // 刹车状态LCALL DELAY2 // 0.5秒延时MOV P1,#0FFH // 信号灯全灭SJMP MAINYZW: MOV P1,#0ABH // 右转弯状态LCALL DELAY2 // 0.5秒延时MOV P1,#0FFH // 信号灯全灭LCALL DELAY2SJMP MAINZZW: MOV P1,#57H // 左转弯状态LCALL DELAY2 // 0.5秒延时MOV P1,#0FFH // 信号灯全灭LCALL DELAY2SJMP MAINORG 0100H // 0.1秒延时子程序DELAY1: MOV R3,#100 // 0.1秒循环次数DEL1: MOV R2,#248 // 1ms循环次数NOPDEL2: DJNZ R2,DEL2DJNZ R3,DEL1RET // 子程序返回ORG 0200H // 0.5秒延时子程序DELAY2: MOV R4,#5 // 0.5秒循环次数DEL3: MOV R3,#100 // 100ms循环次数DEL4: MOV R2,#248 // 1ms循环次数NOPDEL5: DJNZ R2,DEL5DJNZ R3,DEL4DJNZ R4,DEL3RET // 子程序返回END六、实验步骤:(1)用Keil软件对源程序进行调试如下:如图可以看到调试程序无错误,切将其生成HEX文件;(2)根据汽车转向信号灯控制实验电路及相应器件连接电路图如下:(3)将所生成的HEX文件下载到芯片中,根据实验内容对其进行运行;A、当正常驾驶时,按通左转弯开关,左转弯灯,左头灯,左尾灯同时闪烁;按通右转弯开关,右转弯灯,右头灯,右尾灯同时闪烁,闪烁频率为1HZ,如下图所示:B、当刹车时,接通刹车开关,左尾灯,右尾灯同时亮,如下图:C、当停靠站时,接通停靠开关,左头灯,右头灯,左尾灯,右尾灯同时闪烁,闪烁频率为1HZ,如下图:D、出现紧急情况时,接通紧急开关,左转弯灯,右转弯灯,左头灯,右头灯,左尾灯,右尾灯同时闪烁,闪烁频率为5HZ,如下图:七、实验总结:(1)通过软件与硬件的配合使用,更加深刻的理解软件与硬件之间的关系;(2)通过汽车转向信号灯的控制实验的设计与实现,对汽车转向灯控制原理与实际应用有更深刻的了解;(3)通过自己动手,理论与实践相结合,扩展自己的知识视野。
单片机转向灯实训报告
一、实训背景随着汽车工业的快速发展,汽车转向灯在行车安全中扮演着重要角色。
传统的转向灯控制系统多为机械式,存在故障率高、维修不便等问题。
近年来,单片机技术在汽车电子领域的应用越来越广泛,利用单片机实现转向灯的精确控制,不仅能提高行车安全,还能降低维修成本。
本实训旨在通过学习单片机原理和应用,设计并实现一款基于单片机的转向灯控制系统。
二、实训目的1. 掌握单片机的基本原理和应用;2. 学会使用单片机开发工具和编程语言;3. 熟悉转向灯控制系统的工作原理;4. 培养实际动手能力和团队协作精神。
三、实训内容1. 单片机基础知识单片机是一种集成了CPU、存储器、输入/输出接口等功能的微型计算机。
本实训选用8051系列单片机作为核心控制单元。
通过学习8051单片机的内部结构、工作原理、指令系统、编程方法等知识,为转向灯控制系统的设计打下基础。
2. 转向灯控制系统设计(1)系统组成转向灯控制系统主要由单片机控制模块、转向灯驱动模块、信号输入模块、故障检测模块和电源模块组成。
(2)工作原理单片机控制模块接收驾驶员的转向信号,根据信号类型控制转向灯的闪烁频率和亮度。
转向灯驱动模块根据单片机的控制指令,驱动左右转向灯闪烁。
信号输入模块将驾驶员的转向信号转换为单片机可识别的电平信号。
故障检测模块实时监测转向灯的工作状态,一旦发现故障,立即向单片机发送报警信号。
电源模块为系统提供稳定的工作电压。
(3)电路设计根据系统需求,设计合适的电路,包括单片机最小系统、转向灯驱动电路、信号输入电路、故障检测电路和电源电路。
3. 软件设计(1)编程环境使用Keil uVision 5作为编程环境,编写8051单片机程序。
(2)程序设计编写程序实现以下功能:1)接收驾驶员的转向信号,控制转向灯的闪烁频率和亮度;2)检测转向灯的工作状态,一旦发现故障,立即报警;3)实时显示系统运行状态。
四、实训过程1. 熟悉8051单片机原理和编程方法;2. 设计转向灯控制系统电路;3. 编写程序实现转向灯控制功能;4. 测试和调试程序,确保系统稳定运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《单片机原理与应用》课程大作业项目名称:汽车灯光控制系统专业班级:智能监控121 学号: ********* **:***连云港职业技术学院信息工程学院2013 年10 月27 日随着单片机的日益发展,其应用也越来越广泛,通过对“汽车灯光控制系统”设计,可以对单片机的知识得到巩固。
本设计是设计一个单片机控制系统。
在汽车进行左右转向灯、前主灯、倒车灯、故障灯时,实现对各种信号指示灯的控制。
本设计主要是对单片机的并行输入、输出口电路的应用,通过对I/O口控制发光二极管的亮、灭、闪烁,加上一些复位电路、按键电路、驱动电路来模拟汽车尾灯的功能。
关键词单片机;汽车信号灯;电路基础;车灯是行车安全的必备件,除了具有照明作用,对行人和其他车辆还具有转向、会车、刹车等警示作用。
其中汽车转向灯的控制就是一例。
汽车转向和报警信号灯是汽车运动方向和车身状态的表示信号,关系着汽车的安全问题,因此基于单片机的汽车转向灯控制器的一直以来都是汽车电子设计中的一个十分重要的领域。
此次基于单片机的汽车转向灯的设计中,复位电路的设计、LED发光二极管的应用、4个按键开关、键盘扫描来控制LED灯点亮的方式都基本符合课程设计的要求。
其中复位电路的作用是当单片机死机的情况下用来复位重启单片机,软件部分主要是用键盘扫描的方式来与程序中的设定值比较如果一致就执行该段子程序来实现LED的点亮方式。
汽车上的信号灯有:转向灯(左前灯、右前灯、仪表盘上的二个指示灯)。
当汽车转弯、倒车、停靠时,转向灯发出不同的信号。
目前国内广泛使用电热式闪光器产生闪光信号。
闪烁频率在 50~110 次/ min,但是一般控制在 60~95 次min 之间。
闪光器是通过调节镍铬丝的拉力和触点的间隙来满足频率要求的,灯泡功率的大小也会影响闪烁频率。
因此在更换闪光器或灯泡时调整比较困难。
同时,系统没有故检测,驾驶员无法知道车外的转向灯及示宽灯是否点亮,从而影响行车安全。
到目前为止,我们还没有发现能检测灯丝断这种故障的有效方法。
针对上述问题,我们用AT89C51单片机设计了一套汽车信号灯控制系统。
用LED产生闪光信号,同时能自动检测信号灯故障。
信号灯灯具的发展是随着汽车制造技术及电光源技术的发展而逐步完善的。
它经历了机油(或煤油)灯、乙炔气灯到电光源灯的发展历程。
现代汽车信号灯灯具已经开始使用发光二极管(LED)技术以及光导技术,这是信号灯灯具的一次飞跃。
目录摘要 (2)绪论 (3)目录 (I)第一章:项目要求 (1)1.1 AT89C51简介和结构框图 (1)1.2寻址方式 (1)1.3管脚说明 (3)第二章项目设计前的分析 (5)2.1设计目标 (5)2.2 汽车转向灯的几种状态分析 (5)第三章项目设计步骤 (6)3.1 设计程序框图 (6)3.2 实验器材 (6)3,3 设计电路的思路 (6)3.4 汽车灯光控制系统程序清单 (7)四、项目结果及分析 (9)五、总结 (10)参考文献 (11)第一章:项目要求1.1 AT89C51简介和结构框图AT89C51是一种带4K字节闪存可编程可擦除只读存储器(FPEROM—Flash Programmable and Erasable Read Only Memory)的低电压、高性能CMOS 8位微处理器,俗称单片机。
AT89C2051是一种带2K字节闪存可编程可擦除只读存储器的单片机。
单片机的可擦除只读存储器可以反复擦除1000次。
该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。
由于将多功能8位CPU和闪烁存储器组合在单个芯片中,ATMEL的AT89C51是一种高效微控制器,AT89C2051是它的一种精简版本。
AT89C 单片机为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。
外形及引脚排列如图1-1所示图1-1单片机AT89C51外形及引脚排列图1.2寻址方式寻址方式就是指指令中给出寻找操作数或操作数所在地址的方法,执行任何指令都需要操作数。
1)立即寻址MOV DPTR,#1234H; 立即寻址是指在指令中直接给出操作数,出现在指令中的操作数称为立即数,因此被称为立即寻址。
2)直接寻址MOV A,3AH; 直接寻址是指在指令中直接给出操作数单元地址。
功能是将片内RAM的3AH 单元内的数据传送内累加器A。
直接寻址方式只能给出8位地址,因此这种寻址方式的寻址范围只限于片内RAM。
具体:a.低128单元,在指令中直接以单元地址的形式给出;b.特殊功能寄存器,即可以以单元地址形式也可以以寄存器符号形式给出。
直接寻址是访问SFR寄存器的唯一方法。
3)寄存器寻址INC R0; 寄存器寻址是指指令中将指定的寄存器的内容作为操作数。
该语句实现R0寄存器的自加一操作。
寄存器寻址范围: a.四个寄存器组共32个通用寄存器; b.部分特殊功能寄存器,A、AB、DPTR。
4)寄存器间接寻址ANL A,@R1; 是指在指令中给出的寄存器内容是操作数的地址,从该地址取出的才是操作数。
@前缀是区分寄存器寻址和间接寻址的标志。
寻址范围:a.片内ram低128单元,只能采用R0或R1为间接寻址寄存器;b.片外的64K ram单元,使用DPTR作为间接寻址寄存器;c.片外RAM低256单元,除了用DPTR外还可以用R0或R1为间址寄存器,例如MOVX A,@R0d.堆栈区,堆栈操作指令(PUSH和POP)5)相对寻址是指在指令中给出的操作数为程序转移的偏移量。
如JC 80H;6)变址寻址是指以DPTR或PC为基址寄存器,累加器A作为变址寄存器,以两者的内容相加,形成16为的程序存储地址作为操作数地址。
如:MOVC A,@A+DPTR; 变址寻址只能对程序存储器寻址7)位寻址单片机有位操作功能,位寻址的范围包括:a)片内ram中的位寻址区。
有20H-2FH,共16个单元128位,可以直接使用位地址0H~7FH b)可位寻址的SFR。
共有11个可位寻址SFR,实际有83个位可位寻址。
1.3管脚说明VCC:供电电压。
GND:接地。
P0口:P0口为一个8位漏级开路双向I/O口,每脚可吸收8TTL门电流。
当P0口的管脚第一次写1时,被定义为高阻输入。
P0能够用于外部程序数据存储器,它可以被定义为数据/地址的低八位。
在FIASH编程时,P0 口作为原码输入口,当FIASH进行校验时,P0输出原码,此时P0外部必须接上拉电阻。
P1口:P1口是一个内部提供上拉电阻的8位双向I/O口,P1口缓冲器能接收输出4TTL 门电流。
P1口管脚写入1后,被内部上拉为高,可用作输入,P1口被外部下拉为低电平时,将输出电流,这是由于内部上拉的缘故。
在FLASH编程和校验时,P1口作为低八位地址接收。
P2口:P2口为一个内部上拉电阻的8位双向I/O口,P2口缓冲器可接收,输出4个TTL 门电流,当P2口被写“1”时,其管脚被内部上拉电阻拉高,且作为输入。
并因此作为输入时,P2口的管脚被外部拉低,将输出电流。
这是由于内部上拉的缘故。
P2口当用于外部程序存储器或16位地址外部数据存储器进行存取时,P2口输出地址的高八位。
在给出地址“1”时,它利用内部上拉优势,当对外部八位地址数据存储器进行读写时,P2口输出其特殊功能寄存器的内容。
P2口在FLASH编程和校验时接收高八位地址信号和控制信号。
P3口:P3口管脚是8个带内部上拉电阻的双向I/O口,可接收输出4个TTL门电流。
当P3口写入“1”后,它们被内部上拉为高电平,并用作输入。
作为输入,由于外部下拉为低电平,P3口将输出电流(ILL)这是由于上拉的缘故。
P3口也可作为AT89C51的一些特殊功能口,如下表所示:口管脚备选功能P3.0 RXD(串行输入口)P3.1 TXD(串行输出口)P3.2 /INT0(外部中断0)P3.3 /INT1(外部中断1)P3.4 T0(计时器0外部输入)P3.5 T1(计时器1外部输入)P3.6 /WR(外部数据存储器写选通)P3.7 /RD(外部数据存储器读选通)P3口同时为闪烁编程和编程校验接收一些控制信号。
RST:复位输入。
当振荡器复位器件时,要保持RST脚两个机器周期的高电平时间。
ALE/PROG:当访问外部存储器时,地址锁存允许的输出电平用于锁存地址的低位字节。
在FLASH编程期间,此引脚用于输入编程脉冲。
在平时,ALE端以不变的频率周期输出正脉冲信号,此频率为振荡器频率的1/6。
因此它可用作对外部输出的脉冲或用于定时目的。
然而要注意的是:每当用作外部数据存储器时,将跳过一个ALE脉冲。
如想禁止ALE的输出可在SFR8EH地址上置0。
此时, ALE只有在执行MOVX,MOVC指令是ALE才起作用。
另外,该引脚被略微拉高。
如果微处理器在外部执行状态ALE禁止,置位无效。
/PSEN:外部程序存储器的选通信号。
在由外部程序存储器取指期间,每个机器周期两次/PSEN有效。
但在访问外部数据存储器时,这两次有效的/PSEN信号将不出现。
/EA/VPP:当/EA保持低电平时,则在此期间外部程序存储器(0000H-FFFFH),不管是否有内部程序存储器。
注意加密方式1时,/EA将内部锁定为RESET;当/EA端保持高电平时,此间内部程序存储器。
在FLASH编程期间,此引脚也用于施加12V编程电源(VPP)。
XTAL1:反向振荡放大器的输入及内部时钟工作电路的输入。
XTAL2:来自反向振荡器的输出。
振荡器特性:XTAL1和XTAL2分别为反向放大器的输入和输出。
该反向放大器可以配置为片内振荡器。
石晶振荡和陶瓷振荡均可采用。
如采用外部时钟源驱动器件,XTAL2应不接。
有余输入至内部时钟信号要通过一个二分频触发器,因此对外部时钟信号的脉宽无任何要求,但必须保证脉冲的高低电平要求的宽度。
第二章项目设计前的分析2.1设计目标1、发光二极管常亮2、发光二极管一闪一亮3、发光二极管一闪一亮(可延时)4、通过开关控制发光二极管一闪一亮(可延时)5、通过开关控制发光二极管一闪一亮(可延时),当出现故障时能报警2.2 汽车转向灯的几种状态分析汽车灯主要包括左右转向灯、前主灯、倒车灯、故障灯。
其中汽车转向灯包括左转向灯和右转向灯。
其状态如表2-1汽车灯操作表所示表2-1汽车灯操作表第三章项目设计步骤3.1 设计程序框图图3-1程序框图3.2 实验器材AT89C51单片机开发设备一套导线若干3,3 设计电路的思路1、输入端是接口P1.0~P1.4,输出端是发光二极管L1~L4。
开关是K1~K4,分别连接P1.3 P1.5 P1.7 P1.6。
2、设置P1.0连接由开关K3控制的L1,拨动开关K1时左转向灯闪烁。
P1.1连接由开关K4控制的L2,拨动开关K4时右转向灯闪烁。