基于鱼眼镜头的车载全景环视系统
汽车avm相关概念
汽车avm相关概念
汽车AVM(周围视觉系统)是一种车载摄像头系统,以图像处理技术为基础,用于提供驾驶员全方位的周围视野信息。
以下是一些与汽车AVM相关的概念:
1. 多摄像头系统:汽车AVM通常由多个摄像头组成,它们分别安装在汽车的前、后、左、右等位置,以获取全方位的图像数据。
2. 鱼眼镜头:鱼眼镜头是一种广角镜头,它可以提供更大的视场角度,使得驾驶员能够看到更广阔的周围环境。
3. 图像处理技术:汽车AVM系统使用图像处理技术对摄像头捕获的图像进行处理和分析,以提取有用的车辆位置、障碍物检测等信息。
4. 俯视图:汽车AVM可以生成车辆的俯视图,将车辆及其周围环境以鸟瞰的方式呈现,使驾驶员能够清晰地了解车辆周围情况。
5. 虚拟车位检测:汽车AVM可以检测并识别附近的可用停车位,并通过车载显示器向驾驶员显示虚拟的停车位图像,便于驾驶员进行泊车操作。
6. 障碍物检测:汽车AVM能够检测并警示驾驶员周围的障碍物,如其他车辆、行人、自行车等,以提醒驾驶员及时采取行动。
7. 车道偏离警示:汽车AVM可以通过图像处理技术检测车辆
的行驶轨迹,并及时提醒驾驶员如果偏离了车道。
8. 360度全景拍摄:汽车AVM可以通过多个摄像头组合得到
一张全景图像,让驾驶员可以清楚地看到车辆周围的情况。
9. 自动驾驶系统集成:汽车AVM也可以与自动驾驶系统集成,为自动驾驶提供更全面的周围视觉信息,以提高自动驾驶的安全性和效果。
总的来说,汽车AVM是一种现代化的辅助驾驶技术,通过多
摄像头系统和图像处理技术,为驾驶员提供全方位的周围视野信息,以帮助驾驶员更好地认知周围环境,提高驾驶安全性。
最牛汽车环视系统设计,实现360度无死角的安全驾驶
最牛汽车环视系统设计,实现360度无死角的安全驾驶
一. 项目概述
随着当前国民经济的迅速进展和人民生活水平的提高,越来越多的家庭拥有汽车作为代步工具,如何平安便捷地泊好车成为了众多驾驶者共同面向的难题。
传统的泊车系统主要通过三种手段使司机能够看到汽车后方状况,这些手段分离是倒后镜、倒车雷达和倒车摄像头。
然而,这三种手段都存在车侧面这个盲区。
对于一些较复杂路段,司机只能看到前后方向,而车体两侧则简单被路边异物刮伤。
因此,对汽车360°环视系统举行讨论和开发具有很高的前景性和应用性。
本项目采纳 Spartan 6 举行算法的开发及系统控制。
二.系统功能描述
2.1 系统功能按照本项目的设计目标,本设计需要完成的功能有:
采集车的前方后方共四个摄像机的图像信息
将四个摄像机得到的视频信息通过视频处理技术,拼接成一幅360度环视图像
360度环视图像需要有连贯性, 不能感觉到有显然拼接迹象
2.2 时光性能
按照本项目的设计目标,汽车环视系统应当能够对延续视频帧图像举行实时处理,以保证汽车驾驶的平安性。
三. 计划设计
3.1 系统工作原理
3.1.1 理论分析
为了达到360°全景的目标,每个摄像头必需具有90°以上的视角,因此设计中我们采纳了视角达170度的广角鱼眼镜头。
用法中由于镜头视角足够大,不同摄像头的影像就会存在部分重叠现
第1页共4页。
全景环视检测算法
全景环视检测算法全景环视检测算法是一种用于自动驾驶车辆的环境感知与决策规划的技术。
它通过获取车辆周围的全景图像,经过预处理与环视检测,实现车辆定位与方向判断,同时结合环境感知与决策规划,进行融合感知与控制决策,以提高自动驾驶的安全可靠性及稳定性。
1. 图像获取全景环视检测算法的图像获取部分通常由一个或多个鱼眼相机组成。
这些相机安装在车辆的前部、后部和/或侧面,以覆盖尽可能大的视野。
获取的图像需经过图像拼接算法处理,将各个相机获取的图像拼接成一个全景图像。
2. 图像预处理获取的全景图像可能存在畸变、光照不均等问题,需要进行预处理。
预处理包括图像去畸变、图像增强、图像滤波等步骤,以改善图像质量,便于后续的环视检测与车辆定位。
3. 环视检测环视检测是全景环视检测算法的核心部分。
它通过对拼接后的全景图像进行分析,检测出图像中的车道线、交通标志、行人等关键目标,并计算出它们的位置、速度等信息。
同时,通过立体视觉技术,可以获取车辆周围的3D环境信息。
4. 车辆定位与方向判断车辆定位与方向判断是实现自动驾驶的必要条件。
全景环视检测算法通过分析环视检测得到的数据,结合高精度地图、GPS等辅助信息,实现车辆的精确定位。
同时,通过分析车辆的运动学信息,可以判断车辆的行驶方向。
5. 环境感知与决策规划环境感知是自动驾驶的关键技术之一。
全景环视检测算法通过分析环视检测得到的图像信息,结合高精度地图、GPS等辅助信息,可以获取车辆周围的环境信息,如交通状况、道路状况、障碍物等。
根据这些信息,可以进行决策规划,如路径规划、速度规划等,以实现自动驾驶。
6. 融合感知与控制决策融合感知是全景环视检测算法的另一个重要部分。
它通过融合多个传感器的数据,如摄像头、激光雷达、毫米波雷达等,以获取更全面、准确的环境信息。
同时,根据决策规划的结果,可以进行控制决策,如转向控制、油门控制、刹车控制等,以实现自动驾驶。
7. 安全可靠性及稳定性改进为了提高全景环视检测算法的安全可靠性及稳定性,需要进行一系列改进措施。
基于鱼眼镜头的全景图像展开研究的开题报告
基于鱼眼镜头的全景图像展开研究的开题报告一、研究背景鱼眼镜头是一种广角镜头,由于它的镜片曲率很高,可以拍摄到180度以上的视野,因此极具应用前景,尤其是在全景图像展开方面。
随着虚拟现实、增强现实、智能交通等领域的发展,全景图像展开技术越来越受到重视。
全景图像展开技术可以将鱼眼镜头所拍摄的全景图像展开成平面图像,使得用户可以在一张平面图像上查看全景图像信息。
二、研究目的本研究旨在探讨基于鱼眼镜头的全景图像展开技术,通过研究全景图像展开算法,实现将鱼眼相机拍摄的全景图像展开成平面图像,并构建相关的应用系统。
三、研究内容(一)全景图像展开算法的研究1. 基于极点投影法的全景图像展开算法2. 基于等距投影法的全景图像展开算法3. 基于圆柱准投影法的全景图像展开算法4. 基于球面准投影法的全景图像展开算法(二)全景图像展开系统的构建1. 硬件设备的搭建:包括鱼眼相机、计算机、显示器等。
2. 软件开发:采用Python语言开发全景图像展开系统,实现图像拍摄、图像展开、图像导出等功能。
(三)系统应用研究1. 基于全景图像展开技术的虚拟现实应用研究2. 基于全景图像展开技术的智能交通应用研究3. 基于全景图像展开技术的文化遗产保护应用研究四、研究意义(一)推广鱼眼镜头全景图像展开技术,扩大其应用范围。
(二)促进虚拟现实、增强现实、智能交通等领域的发展,提升相关应用的用户体验和便利性。
(三)对文化遗产的保护和传承有一定的帮助。
五、研究方法(一)文献资料法:通过查看相关文献资料,了解全景图像展开算法发展的历史和现状,并归纳总结。
(二)实验法:本研究采用实验法进行全景图像展开算法的验证和应用系统的开发。
(三)问卷调查法:对本研究中开发的全景图像展开应用系统进行用户体验调查和反馈收集。
六、研究进度安排本研究计划分为三个阶段,具体安排如下:第一阶段:文献资料搜集,全景图像展开算法的研究,时间:3个月。
第二阶段:全景图像展开系统的构建,时间:6个月。
一种基于2组摄像头的车载全景环视系统设计
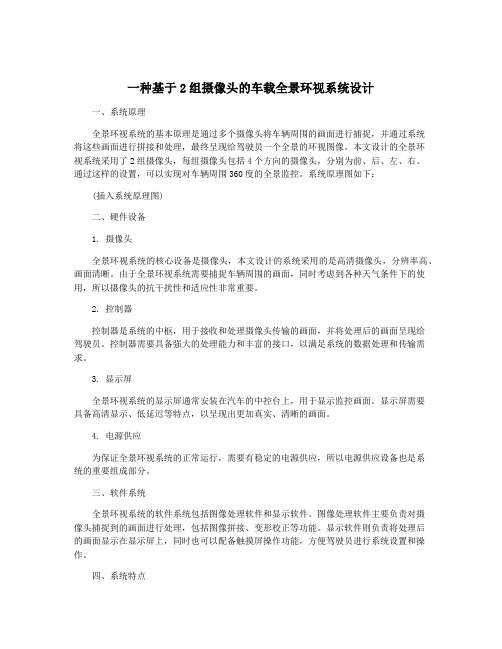
一种基于2组摄像头的车载全景环视系统设计一、系统原理全景环视系统的基本原理是通过多个摄像头将车辆周围的画面进行捕捉,并通过系统将这些画面进行拼接和处理,最终呈现给驾驶员一个全景的环视图像。
本文设计的全景环视系统采用了2组摄像头,每组摄像头包括4个方向的摄像头,分别为前、后、左、右。
通过这样的设置,可以实现对车辆周围360度的全景监控。
系统原理图如下:(插入系统原理图)二、硬件设备1. 摄像头全景环视系统的核心设备是摄像头,本文设计的系统采用的是高清摄像头,分辨率高、画面清晰。
由于全景环视系统需要捕捉车辆周围的画面,同时考虑到各种天气条件下的使用,所以摄像头的抗干扰性和适应性非常重要。
2. 控制器控制器是系统的中枢,用于接收和处理摄像头传输的画面,并将处理后的画面呈现给驾驶员。
控制器需要具备强大的处理能力和丰富的接口,以满足系统的数据处理和传输需求。
3. 显示屏全景环视系统的显示屏通常安装在汽车的中控台上,用于显示监控画面。
显示屏需要具备高清显示、低延迟等特点,以呈现出更加真实、清晰的画面。
4. 电源供应为保证全景环视系统的正常运行,需要有稳定的电源供应,所以电源供应设备也是系统的重要组成部分。
三、软件系统全景环视系统的软件系统包括图像处理软件和显示软件。
图像处理软件主要负责对摄像头捕捉到的画面进行处理,包括图像拼接、变形校正等功能。
显示软件则负责将处理后的画面显示在显示屏上,同时也可以配备触摸屏操作功能,方便驾驶员进行系统设置和操作。
四、系统特点1. 全景监控采用2组摄像头,可实现车辆周围360度全方位的监控,有效减少了盲区带来的安全隐患。
2. 高清画面摄像头的高清画面能够为驾驶员提供更加清晰、真实的监控画面,帮助驾驶员更加准确地判断周围环境。
3. 变形校正系统配备了变形校正功能,可以有效地对摄像头捕捉到的画面进行修正,呈现更真实的环视效果,提高了系统的使用体验。
4. 多种显示模式系统支持多种显示模式,可以根据不同驾驶场景选择合适的显示模式,满足不同驾驶员的需求。
M12鱼眼镜头在安防监控、车载、360°全景、无人机摄影、ARVR、工业检测中的应用介绍

M12鱼眼镜头在安防监控、车载、360°全景、无人机摄影、AR/VR、工业检测中的应用介绍M12鱼眼镜头是一种结构非常紧凑的鱼眼镜头,其镜头螺纹安装直径为12mm。
具有结构小巧、市场范围大、可以用于多种不同的应用领域。
1.安防监控应用M12鱼眼镜头常用于监控系统中,可以实现全景监控,覆盖范围更广。
超大角度的M12鱼眼镜头可以安装在港口、办公楼等许多重要场所的入口处安装1-2个220°以上的M12鱼眼镜头。
配合计算机算法可以实现自动化、智能化访客登记来代替传统的人工登记方式。
准确统计进入人数,与身份识别设备数据做比对,可防止因有意或无意漏登记而造成的安全隐患。
2.汽车行业应用M12鱼眼镜头在汽车行业中被广泛应用,主要包括以下几个方面:①行车记录仪:M12鱼眼镜头可用于汽车行车记录仪中,能够更全面、更真实地记录车辆的行驶情况,并能对车身周边环境进行监测,提高司机驾驶安全性。
②倒车影像:M12鱼眼镜头能够提供更广角的视野,可以将车辆后方全部显示出来,避免了盲区的存在,使驾驶员在倒车时更加便捷、安全。
③自动泊车:M12鱼眼镜头是自动泊车系统不可或缺的部分之一,它能够收集车辆周围的图像信息,帮助车辆完成停车过程。
④环视监控:将多个M12鱼眼镜头连接后,能够实现车辆周围的全景监控,有效提高车辆的安全性。
总之,在汽车行业中,M12鱼眼镜头的应用非常广泛,能够为驾驶员提供更加全面、安全、便捷的驾驶体验。
3.360°全景系统360°全景系统是一种可以提供全方位视角的影像拍摄和展示技术,能够让观众在一个虚拟环境中自由浏览和观察。
该系统主要由以下几个组成部分构成:①相机系统:360°全景相机通常由多个(一般4个大于180°的M12鱼眼镜头)摄像头组成,用于捕捉不同方向的影像。
现代全景相机通常采用M12鱼眼镜头,可以捕捉到更广阔的景象,从而提供更真实的全景效果。
基于场景的360°全景系统设计及应用

基于用户使用场景的逻辑设计,让 360 全景更加智能,体验更加便捷舒适,同时不 失趣味性。
360 全景逻辑设计需要的整车 CAN 信号 和作用统计如表 1:
4.1 启动场景 车辆启动,用户出库或者出车位的场景 时,驾驶员挂 D 档后,弹出 360 全景影像, 无需用户手动激活,方便用户出库 , 如图 4。 4.2 转弯场景 (1)在车辆转弯行驶时,驾驶员放向盘 角度大于 60°,弹出 360 全景影像,结合转 弯场景,方便用户使用,减少因为盲区造成 的隐患。 (2)利用鱼眼摄像头的优势,在方向盘 转动的时候,设置图像跟随方向盘转角而变 动,实现图像随动,保证驾驶员驾驶无盲区。 (3)增加车轮辅助线,用户可以知道车 辆行驶过程中轮胎可能会压到的东西,用户 可以及时进行避让。 4.3 趣味场景 增加车模颜色设置,全景的画面更具趣 味性。增加触摸切换,用户点击车辆四周即 可实现图像切换 ( 图 5)。 4.4 智能场景 在行车或者泊车情况下,雷达探测到障 碍物报警时,用户希望观察周围的障碍物, 针对这种情况通过车身雷达与摄像头的融合 实 现, 如 果 雷 达 探 测 到 障 碍 物, 自 动 弹 出 360,让驾驶更安全可靠。雷达报警消失后, 360 全景 3s 后退出。
图 6 寻车场景框架图
用户通过手机APP 1、查找车辆位置 2、车辆周围照片
可导航到车同时可以查看 用户下车时的车辆前后方照片
场景一/车外远距离 将离开室内…
场景二/找车 步行寻车
显示屏
LVDS
LVDS (80MB/s)
车机
4G/5G
AVM
360模块
摄像头
LVDS
手机APP
场景三/上车 准备开车…
机显示屏进行输出显示,具体见图 3。
基于车载多视角的鱼眼图像拼接算法
2 01 7 . 5 数 据 通 信
Te c h n o l o q v Di s c u s s i o n
基于车载多视角的鱼眼图像拼接算法
周
芳
杨
鸣
王益平
( 宁波大学信息科学与工程学院 浙江宁波3 1 5 2 1 1 )
摘
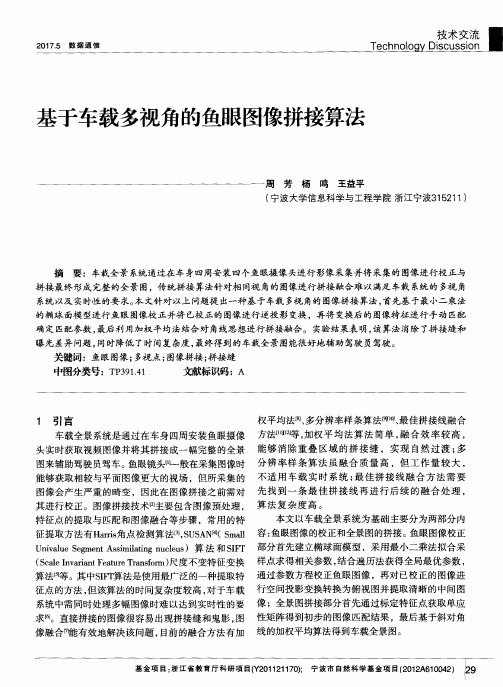
要 :车载全景 系统通过在车身四周安装四个鱼眼摄像头进行影像采集并将采集的图像进行校正与
氍 一
得 到的 最小绝 对 差 即为全 局最优 解 。
2 - 2 逆投 影变换
龋型
在 车载 系统 中 , 车 身 四周 的摄 像 头 的 光 轴 与 地 面不是 垂直 的 . 因 此 校 正 后 的 鱼 眼 图 像 受 倾 斜 角 的影响会 存在 透视 现象 , 不 利 于 后 续 的 全 景 图 拼接 , 如 图3 所示。 针 对 该 问 题 还 需 将 已 校 正 的 图
拼接 最终形成完整的全景图,传统拼接算法针对相 同视 角的图像进行拼接 融合难以满足车载 系统的多视 角 系统以及 实时性的要 求。 本文针对以上 问题提 出一种基于车载多视 角的图像拼接算法, 首先基于最小二乘法 的椭球 面模 型进 行 鱼 眼 图像 校 正并将 已校 正 的 图像 进行 逆投 影 变换 ,再将 变换 后 的 图像 特征 进 行 手动 匹配 确定 匹配参数 , 最后利用加权平均法结合对角线思想进行拼接融合。实验结果表 明, 该算法消除 了 拼接缝和
算法[ 5 1 等。 其 中s I 丌算 法是使用最广泛的一种提取特 通过参数方程校正鱼眼图像 ,再对 已校正的图像进 征点的方法 , 但该算法的时间复杂度较高 , 对于车载 行空间投影变换转换为俯视 图并提取清晰的中间图 系统中需同时处理多幅图像时难 以达到实时 I 生的要 像 ;全景图拼接部分首先通过标定特征点获取单应