基于MSP430单片机的光源跟踪系统
点光源跟踪系统
南京工程学院康尼学院TI杯电子设计竞赛点光源跟踪系统指导老师:学生:目录TI杯电子设计竞赛 (1)一.系统方案 (3)1.1设计要求 (3)1.基本要求 (3)2.发挥部分 (3)1.2方案论证与比较 (4)1.运动控制方案的选择与论证 (4)2.跟踪光源模块 (4)3.模/数转化模块 (4)二.理论分析与计算 (4)2.1舵机的控制方法与参数计算 (4)三.电路与程序设计 (5)3.1系统总体硬件框图 (5)3.2寻光模块电路 (6)3.3程序设计流程图 (7)四.测试方案与测试结果 (7)4.1测试方案 (7)五.结论与设计感想 (8)5.1结论 (8)5.2设计感想 (8)六.参考文献 (8)七.附录 (9)点光源跟踪系统摘要:本点光源跟踪系统以MSP超低功耗单片机系列MSP430F147为核心,完成对光源走直线或者走圆的跟踪等功能。
在机械结构上,我们用2个舵机实现它2个自由度的寻找光源。
采用光电三极管来检测光源的位置,并用激光笔来指向光源。
基于可靠的硬件设计和稳定的软件算法,实现题目要求。
我们更附加了硅光电池给它另外供电。
关键词:MSP430F147 舵机光电三极管光源一.系统方案1.1设计要求1.基本要求(1)光源跟踪系统中的指向激光笔可以通过现场设置参数的方法尽快指向点光源;(2)将激光笔光点调偏离点光源中心30cm时,激光笔能够尽快指向点光源;(3)在激光笔基本对准光源时,以A为圆心,将光源支架沿着圆周缓慢(10~15秒内)平稳移动20º(约60cm),激光笔能够连续跟踪指向LED点光源;2.发挥部分(1)在激光笔基本对准光源时,将光源支架沿着直线LM平稳缓慢(15秒内)移动60cm,激光笔能够连续跟踪指向光源。
(2)将光源支架旋转一个角度β(≤20º),激光笔能够迅速指向光源。
(3)光源跟踪系统检测光源具有自适应性,改变点光源的亮度时(LED驱动电流变化±50mA),能够实现发挥部分(1)的内容;(4)其他。
基于msp430的太阳跟踪系统
2011-2012德州仪器C2000及MCU创新设计大赛项目报告题目:基于MSP430的太阳跟踪系统组别:本科组应用类别:控制系统类平台:MSP430题目:基于MSP430的太阳跟踪系统摘要(中英文)基于MSP430的太阳跟踪系统本设计基于MSP430f149芯片,制作了一个用于精确跟踪太阳收集能量的系统。
系统由430单片核心、光信号采集转换、追踪太阳部分、电压采集、无线数据发送、PC机交互界面六部分组成。
光信号采集转换卡感知太阳位置实现跟踪,由AD实时采集各部分电压并发送到PC上实现实时监控。
关键词:太阳跟踪、msp430Sun tracking system based on the M SP430T his design based on the MSP430f149 chip, made a used to accurately track the sun collect energy system. By 430 single chip system core, light signal acquisition conversion, track the sun part, voltage collection, wireless data transmission, the PC interface six parts. The light signal acquisition conversion card perception the sun position track, and the real-time data acquisition by AD each part to achieve the PC voltage and real-time monitoring.Key words: the sun tracking 、msp4301.引言随着现在社会太阳能利用的普及,太阳能利用率成了一个大家普遍关注的问题。
(整理)3-点光源跟踪(MSP430.点光源追踪(差模输入),舵机控制)
全国大学生电子设计竞赛2010年TI杯模拟电子系统专题邀请赛-点光源跟踪系统(B题)作者:朱洒(16007520)何东辉(16007524)陈玉伟(16007514)学校:东南大学点光源跟踪系统设计报告指导老师:作者:朱洒何栋辉陈玉伟东南大学电气工程学院摘要本方案采用程控恒流源来驱动LED灯,INA270A测量电流,光敏三极管作为传感器采集光强信号,采用双轴舵机作为驱动执行机构,实现了点光源的全方位三维立体跟踪,选用TI公司的MSP430F4260作为处理器.D/A输出控制LED灯的亮度,两路PWM输出用于驱动两个轴上的电机,分别采用两个光敏三极管作为两个轴方向上的差动输入,有效抑制了环境光的影响,经A/D采集输入,逻辑判断,控制两个舵机动作,确保点光源位于四个光敏三极管正对的中心,实现了快速,准确,全方位跟踪的目标.关键字: 恒流LED 光敏三极管舵机 INA270AbstractThe LED lights is driven by programmable constant current source, measuring current by IN270A,collecting the light intensity signals by phototransistor, using a biaxial servo actuator to realize the full range of electrical light three-dimensional tracking, choosing TI's MSP430F4260 as the processor. D / A output controls LED light intensity, two motors on axi-x and axi-z are driven by two PWM outputs, each one with two phototransistors that were used as two differential inputs, inhibiting the effects of environmental light effectively, via A / D acquisition input, logic to judge, control two servo action to ensure that the point source is on the centre of the four phototransistors, achieving tracking of target fastly, accurately and comprehensively.Keyword : Constant Current LED phototransistor steering INA270 一、系统整体设计:二、方案论证:1.电机模块方案方案一:步进电机驱动.采用带减速器的28BYJ48型步进电机,理论精度可达5.625/64°,且控制简单,响应速度快.但电机驱动能力有限,不易用两个做成双轴形式,只能实现二维平面上的跟踪,当沿直线移动点光源时点光源会脱离光敏三极管组成的斜面,造成跟踪误差.方案二: TowerPro MG945金属齿大扭矩舵机驱动.可以在一个舵机的轴上固定另一个舵机实现双轴追踪,且有成品可直接使用.控制采用pwm波脉宽直接调节偏移角度,控制起来也很方便.所以本作品采用方案二.2.点光源接收方案方案一:光电池采集采用光电池进行光强采集,由于光电池短路电流与光强呈线性关系,经I/F变换可输出随光强线性变化的电压信号.但由于采集距离有两米远,电压变化较很小,要经过背景光消减,差模信号放大等一系列信号调理才能送入单片机.而且关电池接收面积大,不容易确定电光源位置.方案二:光敏三极管差动采集光敏三极管灵敏度远高于光电池,但受外界环境影响飘动比较严重,用两个光敏三极管采集电光源两侧的光强差,可以有效消除外界环境光的干扰.光敏三极管接收面不仅小而且是一个有聚光功能的透镜,更容易确定点光源的位置.因此,选择方案二.3.LED驱动模块方案方案一:采用压控恒流源.通过运放op07,场效应管以及采样电阻组成压控恒流源(详细原理见下文),通过D/A输出精确控制,这样控制方便,唯一的缺点是采用线性电源,当电流较大时稳压管发热比较严重,能源利用效率不高.但通过添加散热片,可以用于一段时间的实验.方案二:采用TPS61062专用LED驱动芯片该芯片采用开关电源模式,效率较高可达80%,但由于采用贴片封装,虽然经过电路板引出,我们测试时,只实现了PWM对其亮度的控制,对于数字控制方式精确控其电流没有能够实现,所以不得不放弃这个方案.因此,最终我们选择了方案一.4.电流测量模块方案一:采用小阻值的精密电阻或者康铜丝,但很遗憾我们手边没有买到器材. 方案二:采用9个1Ω普通电阻电阻并联.然后使用INA270转换为电压信号,送入单片机进行A/D转化,经过换算后通过液晶显示出来.采用9个1Ω普通电阻并联不仅可以减小流过每个电阻的电流减小发热的影响,还可以提高电阻精度减小误差.三、各模块原理,实现以及理论分析计算:1.LED驱动及电流检测电路如下:Op07虚短,DAC输入电压相当于直接加到R2上,忽略放大器输入段以及场效应管基极电流,漏极电流为VDAC/R2.其中R2采用7个18Ω电阻并联.要求驱动电流为150mA到350mA可调,VDAC=R2*I,变化范围为0.386V-0.9V.MSP430的DA端口很容易产生这样的参考电压电压,我们采用步进25mA的调节方式.当电流为最大值350mA时,采样电阻上的电压为(0.35/9)v,INA270有着固定的增益为14,最终输出的最大电压为0.544V.MSP430自带的16位SD16_A 进行A/D转换,可实现很精确的测量.而实际上0.11欧姆电阻很小,易受焊点导线等影响,实际采样电阻大于0.11欧姆,我们通过测量一组实验值,进行校准最终得到了较理想的测量结果.另外,为保证场效应管工作在线性区,又不至于功率损耗过大.LED驱动电源电压VCC选取为7V.2.光源检测模块电路图如下:VCC取5v,两个10k的滑动变阻器用于校准两个光敏三极管因参数不对称造成的差模输入。
基于MSP430的太阳角度追踪系统

基于MSP430的太阳角度追踪系统南京航空航天大学自动化学院姚嘉俊【摘要】本文基于MSP430单片机为控制核心,设计了一种自动追踪太阳高度角与方位角转动的自动太阳追踪器,现场运行结果表明该系统跟踪准确、能耗低、可靠性高、系统性能稳定,发电效率提高25%以上,具有重大的现实意义。
【关键词】太阳追踪;单片机;效率能源是人类赖以生存和发展的物质基础。
近几十年来,能源问题一直是举世瞩目的重大问题之一。
人类正在急切寻求可替代常规能源的新能源。
太阳能作为一种清洁无污染的能源, 发展前景非常广阔。
太阳能发电技术已成为全球发展速度最快的技术之一。
然而它也存在着分散性、不稳定性、效率低和成本高的问题, 这就对太阳能的收集和利用提出了更高的要求。
要使太阳能发电真正达到实用水平,一是要提高太阳能光电变换效率并降低其成本,二是要实现太阳能发电同现在的电网联网。
目前很多太阳能电池板阵列基本上都是固定的,没有考虑到太阳光线与地表角度问题,因此没有充分利用太阳能资源, 发电效率低下。
据实验, 在太阳能光发电中, 相同条件下, 采用自动跟踪发电设备要比固定发电设备的发电量提高35 %。
当然,特殊用途和实验室中用的太阳电池效率要高得多,如美国波音公司开发的由砷化镓半导体同锑化镓半导体重叠而成的太阳电地,光电变换效率可达36%,快赶上了燃煤发电的效率。
但由于它太贵,目前只能限于在卫星上使用。
因此在太阳能利用中, 进行追踪是十分必要的。
本文提出一种新型的基于MSP430单片机的太阳光自动追踪系统设计方案, 该系统不仅能自动根据太阳光方向来调整太阳能电池板朝向, 有效的保证太阳能电池板能够时刻正对太阳,最大限度的提高太阳跟踪精度,完美实现适时跟踪,最大限度提高太阳光能利用率,提高发电效率。
一、自动追踪系统的组成和结构基本原理框图该系统时刻检测太阳与光伏阵列的位置并将其输入到控制单元,控制单元对这2个信号进行比较并产生相应的输出信号来驱动旋转机构,使太阳光时刻垂直入射到光伏阵列的表面上。
基于MSP430的点光源跟踪系统的设计
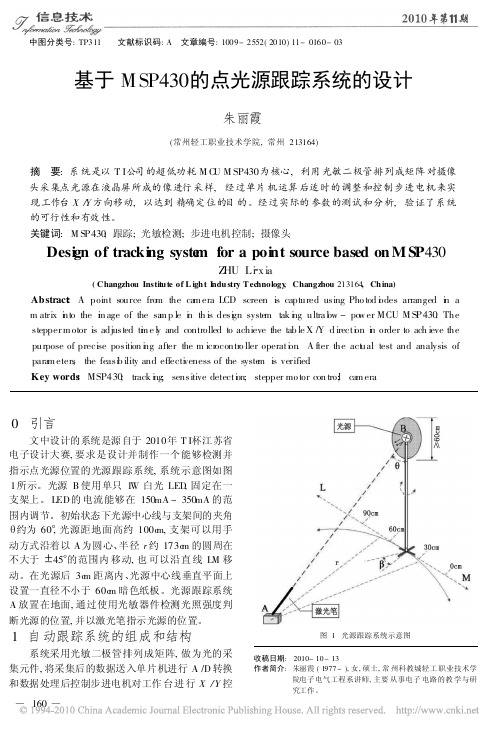
中图分类号:TP311 文献标识码:A 文章编号:1009-2552(2010)11-0160-03基于M SP430的点光源跟踪系统的设计朱丽霞(常州轻工职业技术学院,常州213164)摘 要:系统是以T I公司的超低功耗M C U M SP430为核心,利用光敏二极管排列成矩阵对摄像头采集点光源在液晶屏所成的像进行采样,经过单片机运算后适时的调整和控制步进电机来实现工作台X/Y方向移动,以达到精确定位的目的。
经过实际的参数的测试和分析,验证了系统的可行性和有效性。
关键词:M SP430;跟踪;光敏检测;步进电机控制;摄像头Desi gn of tracki ng syste m for a poi nt source based on M SP430Z HU Li x ia(Changzhou Institu te of L igh t I ndu stry T echnology,Changzhou213164,Ch ina) Abstract:A point source fro m the ca m era LCD screen is captured using Pho tod i o des arranged i n a m atrix i n to the i m age of the sa m p le i n th is desi g n syste m tak i n g ultra l o w-po w er MCU M SP430.The stepper m otor is adjusted ti m e l y and controlled to achieve the tab le X/Y d irecti o n i n order to ach ieve the purpose of precise position i n g after the m icr ocontr o ller operati o n.A fter the act u al test and analysis of para m eters,the feasi b ility and effecti v eness of the syste m is verified.Key words:MSP430;track i n g;sensitive detecti o n;stepper mo tor con tro;l ca m era0 引言文中设计的系统是源自于2010年T I杯江苏省电子设计大赛,要求是设计并制作一个能够检测并指示点光源位置的光源跟踪系统,系统示意图如图1所示。
基于MSP430的红外光源控制系统及其硬件设计

基于MSP430的红外光源控制系统及其硬件设计摘要随着集成电路技术、微控制器技术、光谱技术高速发展,基于红外光光谱特性的应用越来越广泛。
红外光源被广泛应用于气体分析、激光测距、机器人定位、遥感、非接触式测温等诸多领域中。
然而由于红外光源通常功率较大,导致制约相关红外光源应用技术的发展。
随着近年来集成电路技术飞跃式的发展,微控制器、大功率场效应管等电子元器件性能得到大幅度提高,使得利用微控制器控制红外光源成为一种主流趋势。
本设计通过利用MSP430单片机以及稳压电压实现红外光源的电压控制以及利用微控制器技术控制场效应管的通断实现红外光源的电子调制。
关键词:红外光源;调制;电压控制;MSP430;MSP430-based infrared light source control system and its hardwaredesignAbstractWith the rapid development of integrated circuit technology, microcontroller technology, and spectroscopy technology, applications based on the spectral characteristics of infrared light are becoming more and more extensive. Infrared light sources are widely used in gas analysis, laser ranging, robot positioning, remote sensing, non-contact temperature measurement and many other fields. However, due to the relatively high power of infrared light sources, the development of related infrared light source application technologies is restricted. With the rapid development of integrated circuit technology in recent years, the performance of electronic components such as microcontrollers and high-power field effect transistors has been greatly improved, making the use of microcontrollers to control infrared light sources a mainstream trend. This design uses the MSP430 MCU and the stabilized voltage to realize the voltage control of the infrared light source and the microcontroller technology to control the on and off of the field effect tube to realize the electronic modulation of the infrared light source.Keywords: Infrared light source; modulation; voltage control; MSP430;目录1前言 (2)1.1本设计的目的及意义 (2)1.2本设计在国内外的发展概况及存在问题 (3)1.3本设计应解决的主要问题 (3)2本设计 (4)2.1系统方案 (4)2.2 硬件设计软件原理 (5)2.3电源电路原理与设计 (6)2.3.1单片机稳压电路设计 (6)2.3.2数控可调电压电路设计 (8)2.3.3数字电位器电路设计 (10)2.4单片机电路原理与设计 (11)2.5 按键电路原理与设计 (13)2.6 串口电路原理与设计 (13)参考文献 (14)谢辞 ...................................................... 错误!未定义书签。
MSP430单片机的光电跟踪伺服系统研究方案
MSP430 单片机的光电跟踪伺服系统研究方案
0 引言
光电跟踪系统是以光电器件(主要是激光器和光电探测器)为基石,将光学
技术、电子/微电子技术和精密机械技术等融为一体,形成具有特定跟踪功能的装置。
目前国内外较先进的光电跟踪系统多以激光测距仪、电视跟踪仪和红外跟
踪仪三位一体为核心构成。
采用机械方法实现跟踪系统控制起来还不太灵
敏。
对于一个光电追踪系统,一般通过目标识别、位置信号检测、位置信号
处理、PID 伺服控制计算、驱动控制、位置反馈、目标不间断跟踪,完成特
定跟踪任务。
而与之配套的目标识别检测处理与PID 伺服控制实现是非常重要的部分,是保证整个系统能否正常工作的关键。
为更好地实现精确的跟踪伺服系统,本方案中使用MSP430 单片机完成对目标定位跟踪的PID 闭环控制,采用S066A 的国产四象限探测对目标进行识别跟踪定位。
MSP430 单片机是美国TI(德州仪器)公司近年推出的16 位高性能混合信号处理器。
由于它具有处理能力强、运算速度快、集成度高、外
部设备丰富、超低功耗等优点,因此在许多领域内都得到了广泛的应用。
S066A 国产四象限探测器光谱响应范围在400~1 100 nm,它的峰值波长为940 nm,它具有较高的灵敏度和精确度,广泛运用于位置检测,光学定位,距离探测等方面。
本研究方案的意义在于一方面对四象限探测器件以及新式低功耗高集成的
微处理器的使用和推广;另一方面探索一种新的机械对准结构设计以及为低成本跟踪系统的研制提供一种可行性方案。
1 总体设计方案。
点光源跟踪系统的研究

点光源跟踪系统的研究[摘要] 本系统采用MSP430F2274作为控制核心,通过键盘修改参数,全面实现了题目中的基本要求和发挥部分要求。
建立二维坐标,使用两个舵机分别控制随动系统垂直方向和水平方向,使得激光笔能够更加快速准确的指向光源,尤其是当光源沿直线运动时。
当光源移动30cm时,随动系统能够快速自动找到光源。
[关键词] MSP430 随动系统实时跟踪伺服电机一、方案比较与论证本设计要求实现随动系统能够定点找到光源,随动追踪光源,光源沿弧线和直线运动时均能够找到光源等。
根据题目要求,本系统由单片机、LED光源、捕获光强、放大电路、舵机等五个模块构成,各模块经过多个方案的比较与论证,最终提出了使系统最优化的整个系统方案。
系统总体框图如图B-1所示。
1、捕获光强系统模块捕获光强系统模块主要由光敏三极管、激光笔组成。
方案一:一维随动系统,采用一个光敏三极管和一个激光笔的方式。
如图B-2所示。
G为光敏三极管J为激光笔光敏三极管G位于激光笔J的上方,两者在垂直方向处于同一直线上,以光敏三极管为中心可水平转动。
初始调整位置时,光敏三极管的轴线与激光笔的轴线要相交于光源B。
光敏三极管接收来自光源B的光照,如图B-3。
首先找到让光敏三极管扫描一次,得到最大电压值Um,从而找到最大的光强位置,即光源。
当光源发生移动时,光敏三极管接收到的光强减小,此时控制随动系统跟踪光源的运动方向进行移动。
此方案电路简单,容易调整三极管和激光笔的初始位置。
但是光源沿直线运动时,光敏三极管和激光头的轴线不可能交与一点,导致跟踪光源时出现偏差。
由于随动系统只能水平转动不能垂直转动,导致当光源沿直线LM移动时,激光笔不能准确的指向光源,存在固有误差图B-3三极管接受光源示意图方案二:二维随动系统。
采用四个光敏三极管成十字形排列,一个激光笔位于十字中心。
如图B-4所示。
图B-4方案二其中采用一个伺服电机控制L和R两个光敏三极管三极管用于沿水平方向捕获光强,另一个伺服电机控制S和X用于沿垂直方向捕获光强,最终寻找的光源位置为水平扫描和垂直扫描的交点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
文献标识码:A
文章编号:1007-3973(2010)011-068-0S 的响应时间约为 100ms。光敏二极管 是根据硅 PN 结受光照后产生的光电效应原理制成的, 光敏二 极管工作于反向偏压下,其光谱响应特性主要由半导体材料 中所掺的杂质所决定。光敏二极管的最大工作频率为几十兆 赫兹,其缺点是灵敏度不高。光敏三极管常用来检测可见光 或红外光, 有光照射或光强变化时, 集电极产生的光感生电流 直接馈人基极, 并被器件本身所放大, 因此光敏三极管有较高
科研探索
与 知识创新
基于 MSP430 单片机的光源跟踪系统
□ 廉春原[1] 徐 艾[2]
([1]常州工学院电子信息与电气工程学院 江苏・常州 213002; [2]常州机电职业技术学院电气工程系 江苏・常州 213164) 摘 要: 光源跟踪是一项应用广泛的实用技术, 将该技术应用于太阳能设备上, 能使太阳能板调节自身角度始 终垂直于太阳光照射方向, 从而提高设备工作效率。 基于 MSP430 单片机的光源跟踪系统方案使用光敏三极管 3DU5 对光强进行采集, 经信号调理后送入单片机自带的 A/D 转换器将其转换为数字量, 最后单片机根据对采 集数据的分析结果控制步进电机动作, 达到自动跟踪光源的目的。测试结果表明系统能够满足设计要求。 关键词:光源跟踪 MSP430 3DU5 步进电机 中图分类号: TP273 1 引言 在太阳能电池, 太阳能热水器等很多领域都应用到光源 跟踪技术, 使用该技术能够使太阳能设备的工作效率更高。 本 设计采用光敏三极管采集光强信号,设计了基于 MSP430 单 片机的光源跟踪系统, 利用两台步进电机带动光伏面板转动, 从而准确跟踪光源。 2 系统总体结构设计 为了使光伏面板能准确跟踪太阳光源,至少应有两台 电机带动面板做二自由度的转动。跟踪系统原理图如图 1 所示, 矩形面板沿 Y 轴方向的两对边各安装一光电传感器, 太阳距离地球足够远,因此照射在这两个传感器上的光线 可看作平行光, 若光线垂直于 X 轴入射, 且没有其他干扰, 则这两个传感器上接受到的光强相等。相似的,若光线垂 直于 Y 轴入射, 则安装在矩形面板沿 X 轴方向两侧的传感 器上接受到的光强相等。 根据四个传感器采集的光强信息, 单片机控制两个步进电机带动面板向垂直于太阳光的方向 转动。 3 硬件电路设计 3.1 MSP430 简介 单片机的选择主要考虑了单片机自带资源是否满足设计 要求, 如果能够选择合适的单片机, 则可大为简化电路设计的 复杂程度, 从而提高系统的可靠性。综合考虑后, 系统采用了 TI 公司的 MSP430F149 单片机作为核心控制器件。 该器件属 于 MSP430 系列单片机的一种, CPU、 由 存储器和外围模块组 成, 这些部件通过内部地址总线、 数据总线和控制总线相连构 成单片微机系统。 MSP430F149 和通用微处理器基本相同, 但 MSP430F149 更加突出了体积小、 功能强、 超低功耗、 系统工作 稳定、 面向控制的等特点, 它具有强大的处理能力, 更高性能 模拟技术及丰富的片上外围模块, 具有很高的性能价格比。 3.2 光电传感器的选择 常用的光电传感器主要有光敏电阻、 光敏二极管、 光敏三 (CdS) 及硒化锡 极管等几种。光敏电阻的典型材料有硫化锡 (Cdse) 两种。光敏电阻的 CdS 或 Cdse 沉积膜面积越大, 其受 光照后的阻值变化也越大, 故通常将沉积膜做成 “弓” 字形, 以 增大其面积。光敏电阻属于无结元器件, 其价格低廉, 便于系 统布局, 但其工作时的响应速度较慢, Cdse 光敏电阻的响 如 图 1 跟踪系统原理图 跟踪系统的总体结构图如图 2 所示,主要包含单片机主 控模块、 光检测与信号放大模块、 A/D 转换模块、 电机驱动模 块、 电源模块、 显示模块等, 其中 A/D 转换模块利用单片机本 身的 A/D 转换通道实现, 电源模块给整体跟踪系统供电, 显示 模块采用数码管构成,在单片机的控制下实时显示四路光强 采集信号的电压值。
—— 科协论坛 ・ 2010 年第 11 期 (下) ——
科研探索
与 知识创新
的灵敏度。本系统设计时采用了光敏三极管 3DU5 作为光强 检测传感器。 3.3 信号放大电路设计 信号放大电路原理图如图 3 所示。当光敏三极管受到不 同光照时阻值不同。通过与一个固定阻值的电阻串联分压, 将阻值变化转化为电压变化。当光照强度变化时,电压值变 化,通 过 反 相 比 例 放 大 电 路 将 电 压 值 放 大,放 大 后 送 入 MSP430F149 单片机自带的 8 路 12 位 A/D 转换模块中的 A0~ A3, 分别对四路光敏三极管输出电压进行采集。
69
图 3 信号放大电路原理图 3.4 步进电机驱动电路设计 本系统中步进电机的驱动采用 LM298 实现, LM298 的控 制信号 IN1-IN4 由单片机 I/O 口输出,LM298 的四个输出端 OUT1-OUT4 分别接步进电机的两相绕组, 其电路原理如图 4 所示。
图 4 LM298 驱动电路原理图 4 软件设计 4.1 系统流程图 图 5 所示为系统程序流程图。程序开始工作之后,首先 系统进行参数设置, 然后系统分别扫描四路 A/D 输入, 把采样 数据寄存在单片机 RAM 中, 然后进行判断。 如果矩形面板沿 X 轴方向两对边的光电传感器采样数据不相等, 说明这两对边 与太阳光入射方向不垂直, 此时驱动电机使面板绕 X 轴方向 朝光强较强的一侧旋转; 如果矩形面板沿 Y 轴方向两对边的 光电传感器采样数据不相等, 则驱动电机使面板绕 Y 轴方向 朝光强较强的一侧旋转,直到面板的四条边都与太阳光入射 方向垂直。
—— 科协论坛 ・ 2010 年第 11 期 (下) ——
图 5 系统流程图 4.2 A/D 模块的使用 光源跟踪系统使用 MSP430F149 单片机自带 8 路 12 位 A/D 模块中的 A0~A3,分别对四向光敏三极管输出电压进行 采集。A/D 基本设置程序如下所示: ADC12CTL0 = ADC12ON+SHT0_8+MSC; // 打 开 ADC, 设置采样时间 ADC12CTL1 = SHP+CONSEQ_3; // 使用采样定时器 ADC12MCTL0 = INCH_0; ADC12MCTL1 = INCH_1; ADC12MCTL2 = INCH_2; ADC12MCTL3 = INCH_3+EOS; // 确定四路 A/D 通路 ADC12IE = 0x08; // 使能 ADC 中断 ADC12CTL0 |= ENC; // 使能转换 ADC12CTL0 |= ADC12SC; // 开始转换 5 结束语 使用 MSP430 单片机作为核心控制器保证系统能够快速 响应, 利用单片机内部的 A/D 转换模块简化了外部电路, 提高 系统的可靠性。 系统设计完成后进行了现场测试, 测试结果表 明系统能够快速准确跟踪太阳光线的入射方向, 提高了光伏面 板的工作效率, 工作稳定, 控制灵活, 具有一定的实用价值。 参考文献: [1] 张天钟,姜宝钧,邓兴成.基于 MCS-51 单片机的光源跟踪 [J].实验科学与技术,2006,12. [2] 邓鹏,隋波.基于 MSP430 单片机的多通道数据采集系统[J]. 舰船电子工程,2009,3. [3] MSP430x1xx family user's guide [M]. Texas Instruments Incorporated, 2003. [4] Jiang Y P. Intelligent flow totalizer based on MSP430 mixed mingle microcontroller[J]. IEEE Sensors Applications Symposium, 2007(2). [5] 巫付专,吴必瑞,蒋群.基于 MSP430 的无功补偿系统设计与 实现[J].自动化仪表,2009, 2.